Изобретение относится к робототехнике и может быть использовано в несущих механических системах (далее НМС) манипуляторов, предназначенных для вращения изготовляемых деталей по сложным сферическим траекториям. Например, при неразрушающем контроле разноплотности материала профильных оболочек, толщинометрии гальванопокрытий деталей или для обеспечения сварки, резки, термической обработки и т.п.
Известны из кн. Я.Буда и др. Автоматизация процессов машиностроения. Учеб. пособие для машиностр. спец. вузов. М.: Высш. шк., 1991, стр.291-292, манипуляторы, предназначенные для крепления, переноса и установки свариваемых деталей в положения, требуемые для обеспечения требований технологии и доступности места сварки. Позиционирование свариваемых деталей производится автоматически от системы управления дискретно, на определенные расстояния и углы.
Недостатком является малое количество степеней подвижности рабочего стола и как следствие этого его небольшие функциональные возможности.
Известная по патенту РФ №2093344, В25J 9/08, 17/00, несущая механическая система, содержащая две кинематические вращательные пары, первая из которых образована между столом и платформой, а вторая - между платформой и основанием, два электродвигателя и зажимное устройство.
В описании к патенту НМС обозначена термином манипулятор-платформа, а основание обозначено - корпус, что недостаточно точно раскрывает их назначение.
Недостатком данной НМС является то, что электродвигатель вращения стола расположен на платформе. Известно, что способ расположения электродвигателя, относительно приводимого им в движение какого-либо звена, является важной конструктивной характеристикой НМС. От варианта расположения электродвигателя во многом зависят технические характеристики НМС, ее быстродействие, управляемость и возможные области применения. Расположение электродвигателя на подвижном звене увеличивает габариты и массу подвижного звена, что приводит к уменьшению доли полезного груза (изготавливаемой детали). В случае использования известной НМС при изготовлении ограниченной номенклатуры деталей, незначительно отличающихся конфигурацией и размерами, к недостатку можно отнести наличие линейного электродвигателя перемещения стола вдоль координаты Z'. Этот электродвигатель также смонтирован на платформе, что приводит к увеличению вышеуказанного недостатка. Недостатком является сложная конструкция НМС и как следствие этого необходимость больших затрат на ее изготовление и эксплуатацию. Так, для обеспечения перемещения стола использовано три типа различных электродвигателей оригинальной конструкции (угловые и линейный), требующие изготовления.
Задачей, решаемой данным изобретением, является улучшение конструктивных и технических характеристик НМС: расположение всех электродвигателей на основании, улучшение управляемости перемещением изготавливаемой детали, а также упрощение конструкции.
Технический результат, достигаемый при использовании настоящего изобретения, заключается в улучшении управляемости приводом вращения стола, в возможности установки изготовляемой детали на столе в требуемом положении относительно оси завала стола без применения механизированного привода. А также в упрощении шарнирного подвеса стола относительно корпуса, уменьшении количества используемых электродвигателей, обеспечении возможности применения вместо электродвигателей оригинальной конструкции электродвигателей выпускаемых промышленностью. Расширена область возможного применения. Например, при необходимости защиты зоны манипулирования изделием при взрывоопасных работах НМС может легко встраиваться в герметичный бокс, при этом электродвигатели будут располагаться снаружи. Это обеспечивает безопасность работы и значительно упрощает обслуживание и ремонт НМС.
Указанный выше технический результат достигается тем, что в несущей механической системе, содержащей две кинематические вращательные пары, первая из которых образована между столом и платформой, а вторая - между платформой и основанием, два электродвигателя и зажимное устройство, вторая кинематическая вращательная пара снабжена двумя кронштейнами. Оба кронштейна скреплены с ее подвижными звеньями. Кронштейны выполнены таким образом, что поверхность стола, смонтированного вместе с платформой на них, расположена ниже оси вращения второй кинематической пары при ее горизонтальном расположении. Механизм привода вращения стола, кинематически связанный с зубчатым колесом, скрепленным со столом, размещен в одном из кронштейнов. Ведущий вал этого механизма, расположенный в пустотелом подвижном звене второй кинематической вращательной пары, соединен с валом электродвигателя вращения стола, смонтированного на основании. Зажимное устройство, выполненное с возможностью замены, снабжено установочной базой, обеспечивающей совмещение осей симметрии изготавливаемой детали сферической формы с осью вращения этой пары.
Снабжение второй кинематической пары двумя кронштейнами, скрепленными с ее подвижными звеньями, обеспечило возможность осуществления установки различных деталей сферической формы соосно с осью вращения платформы при их закреплении на столе. Выполнение кронштейнов таким образом, что поверхность стола, смонтированного вместе с платформой на них, расположена ниже оси вращения второй кинематической пары, обеспечило возможность осуществления установки различных деталей полной и неполной сферической формы соосно с осью вращения платформы при их закреплении на столе. Размещение в одном из кронштейнов механизма привода вращения стола, кинематически связанного с зубчатым колесом, скрепленным со столом, обеспечило возможность установки электродвигателя привода на основании. Для этого ведущий вал механизма привода вращения стола расположен в пустотелом подвижном звене второй кинематической пары и соединен с валом электродвигателя вращения стола. В результате обеспечено уменьшение габаритов и массы подвижной платформы, что привело к увеличению доли полезного груза, закрепляемого на столе. Применение установочной базы в зажимном устройстве обеспечило при закреплении детали сферической формы совмещение оси симметрии этой детали с осью завала платформы. Выполнение зажимного устройства с возможностью его замены обеспечило осуществление совмещения осей симметрии различных деталей с осями вращения и завала платформы при их закреплении.
На фиг.1 показана НМС, общий вид; на фиг.2 - то же, левый элемент второй кинематической вращательной пары; на фиг.3 - то же, привод второй кинематической вращательной пары; на фиг.4 - вариант использования НМС в автоматизированной радиометрической установке для контроля разнотолщинности материала сферических оболочек и толщинометрии гальванопокрытий, блок-схема; на фиг.5 и 6 - вариант использования НМС в автоматизированной радиометрической установке для контроля разнотолщинности материала сферических оболочек и толщинометрии гальванопокрытий, общий вид.
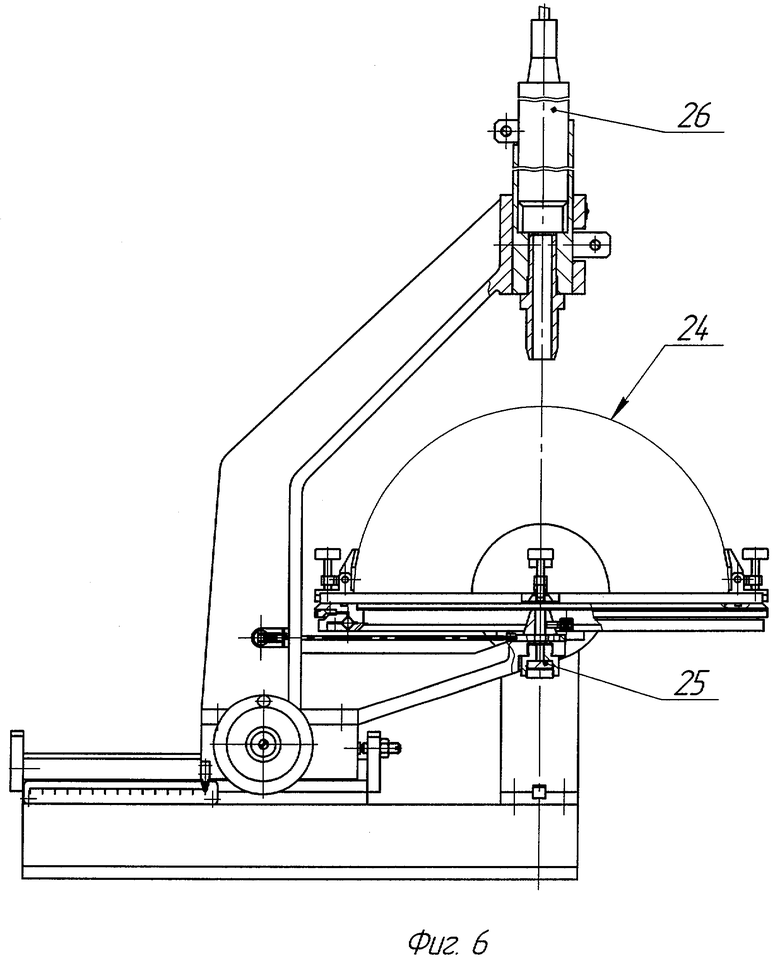
НМС (см. фиг.1) содержит две кинематические вращательные пары, первая из которых образована между столом 1 и платформой 2, а вторая - между платформой 2 и основанием 3, электродвигатель 4 завала стола вокруг оси X, электродвигатель 5 вращения стола вокруг оси Y и зажимное устройство.
Вторая кинематическая вращательная пара выполнена с двумя подвижными звеньями 6 и 7. Подвижные звенья, соосные относительно друг друга, шарнирно соединены соответственно с неподвижными звеньями 8 и 9 этой пары. Неподвижные звенья закреплены на основании 3. С подвижным звеном 6 скреплен кронштейн 10, а с подвижным звеном 7 - кронштейн 11. Кронштейны выполнены таким образом, что поверхность 12 стола 1, смонтированного вместе с платформой 2 на них, расположена ниже оси вращения Х второй кинематической пары при ее горизонтальном расположении.
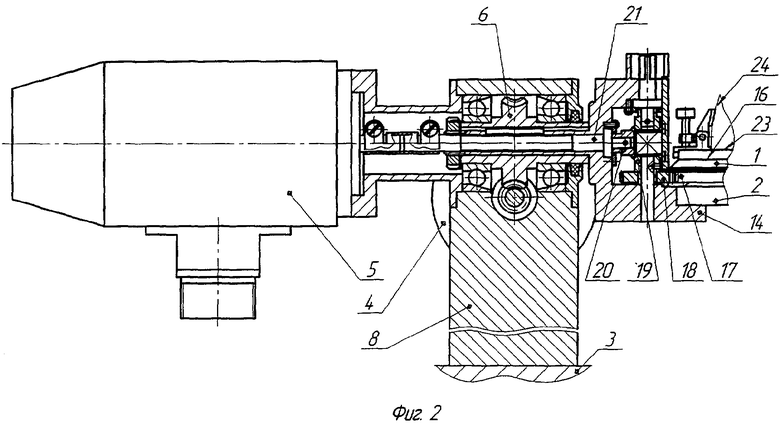
Механизм привода вращения стола 1 вокруг оси Y размещен в кронштейне 10 (см. фиг.2). Цилиндрическое зубчатое колесо 13, скрепленное со столом 1, кинематически связано с цилиндрической шестерней 14, коническими зубчатыми колесами 15 и 16 этого механизма. Шестерня 14 и колесо 15 соединены в блок, в свою очередь, колеса 15 и 16 образовали между собой пару. Колесо 16 соединено с ведущим валом 17. Вал 17, расположенный в пустотелом подвижном звене 6 второй кинематической вращательной пары, связан с валом электродвигателя 5 вращения стола 1.
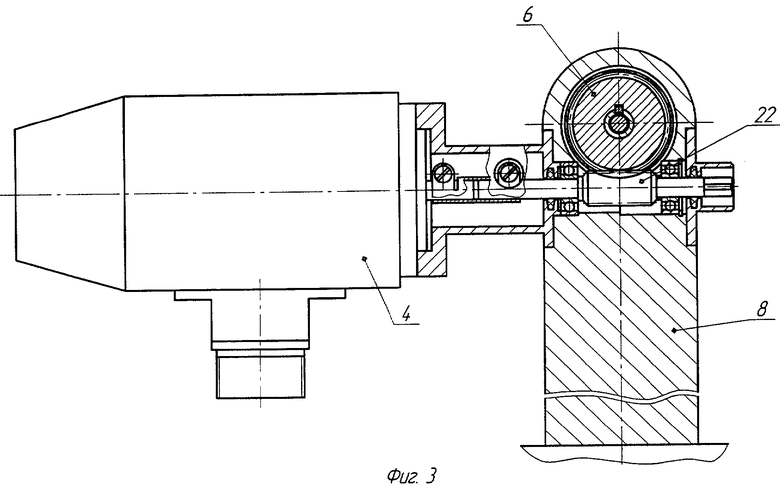
Механизм привода завала стола 1 и платформы 2 (см. фиг.3) размещен в неподвижном звене 8 второй кинематической вращательной пары. Подвижное звено 6 этой пары выполнено в виде червячного колеса, которое кинематически соединено с червяком 18. Червяк 18, в свою очередь, соединен с валом электродвигателя 4.
Электродвигатели 4 и 5 смонтированы на основании 3 с помощью неподвижного звена 8.
Зажимное устройство снабжено как минимум тремя двуплечими рычагами 19. Рычаги 19 шарнирно установлены на ползунах 20. Один конец двуплечего рычага является прижимом, а на другом - размещен винт 21, резьбовой конец которого упирается в ползун 20. Горизонтальная часть ползуна, являющаяся направляющей, выполненной в форме "ласточкиного хвоста", вставлена в паз той же формы, выполненный в подложке 22.
Форма выполнения направляющей ползуна 20 и паза в подложке 22 может быть любой.
Зажимное устройство снабжено установочной базой 23, которой является верхняя поверхность подложки 22. Форма выполнения базы 23 зависит от конфигурации устанавливаемой детали 24. Для деталей с полной сферической поверхностью (шар) база может быть выполнена в виде ложемента с вогнутой сферической поверхностью (не показано). Для деталей с неполной сферической поверхностью (шаровой сегмент) база может быть выполнена в виде плоской поверхности (см. фиг.1). Если устанавливаемая деталь имеет кроме сферы элементы другой формы, то ее установка может быть осуществлена с их помощью, например, за цилиндрический или конический хвостовик и тому подобное (не показано).
При базировании изготавливаемых деталей сферической формы с различной конфигурацией и размерами между столом 1 и подложкой 22 могут устанавливаться прокладки для изменения расстояния от базы 23 до оси вращения Х (не показано) или одно зажимное устройство может меняться на другое. При изготовлении ограниченной номенклатуры деталей, незначительно отличающихся конфигурацией и размерами, может быть достаточным наличия одного зажимного устройства.
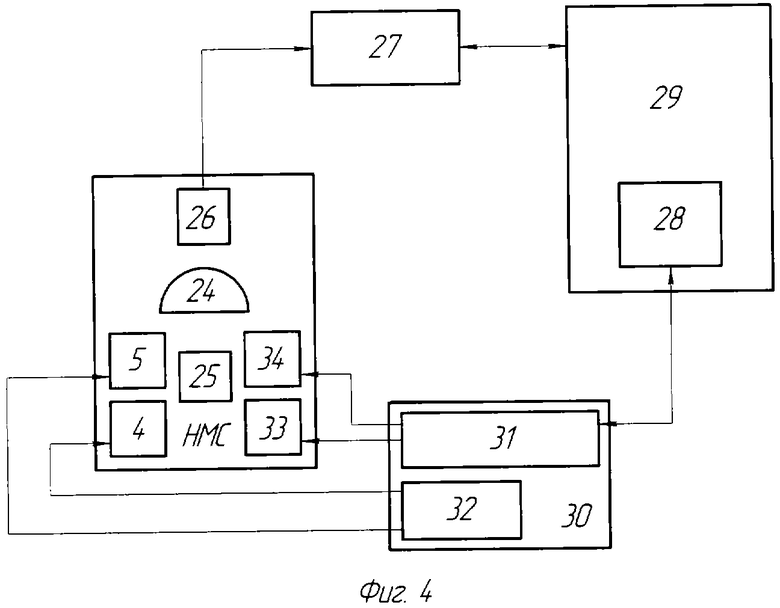
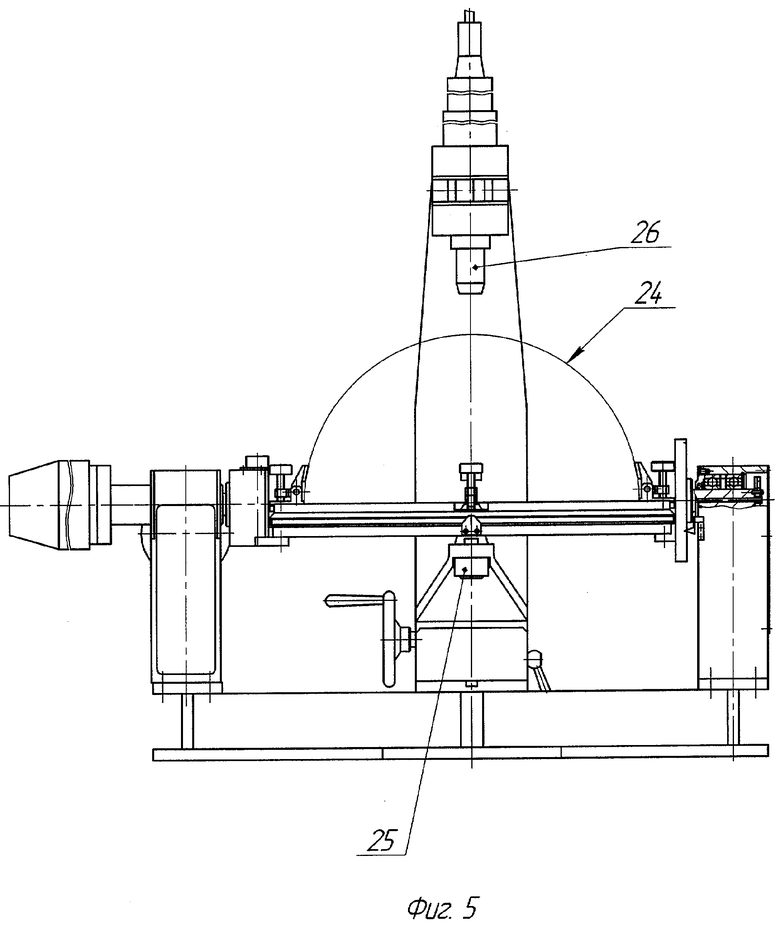
Пример конкретного применения НМС: одним из возможных использований НМС может быть ее применение в автоматизированной радиометрической установке для контроля разнотолщинности материала сферических оболочек и толщинометрии гальванопокрытий (см. фиг.4). Установка снабжена ионизирующим источником 25 и детектором излучения 26, которые закреплены соосно с осью Y на основании НМС (см. фиг.5 и 6). Вход счетчика 27 электрически соединен с детектором 26, а выход - с платой 28 управления шаговыми электродвигателями 4 и 5. Плата 28 установлена в системном блоке компьютера 29. Пульт управления 30 содержит элементы индикации происходящих процессов коммутации и выбора режима работы, расположенные на передней панели (не показано), распределитель 31 и коммутатор 32. Распределитель 31 электрически соединен с платой 28 и конечными выключателями 33 и 34. Коммутатор электрически соединен с шаговыми электродвигателями 4 и 5.
НМС работает следующим образом.
Для манипулирования изготавливаемой деталью 24 сферической формы ее устанавливают на базу 23 стола 1. При установке изготавливаемой детали 24 на базу 23 обеспечивается совмещение ее оси симметрии с осью завала стола 1 вокруг оси X. Совмещение другой ее оси симметрии обеспечивается закреплением ползунов 20 на равноудаленном расстоянии от оси Y вращения стола 1, достаточном для зажима детали 24. Зажим и снятие зажима осуществляют вращением винта 21 у каждого зажимного устройства. После закрепления детали 24 осуществляют ее принудительное вращение вокруг оси Y и завал вокруг оси X. Эти движения обеспечивают управлением включенными электродвигателями 4 и 5.
Пример конкретного управления НМС в автоматизированной установке: управление процессами смещения контролируемой детали может быть осуществлено с помощью компьютера 29. Посредством управляющей программы задается скорость вращения и завала детали 24. Сигналы с компьютера 29 поступают к распределителю 31. Распределитель формирует по двум каналам: вращение и завал, сигналы логического уровня напряжения, соответствующие последовательности коммутации обмоток шестифазных шаговых электродвигателей 4 и 5, приводящих в движение механизмы вращения и завала контролируемой детали 24. Последовательность сигналов на шаговый двигатель 4 реверсируется, что позволяет производить завал контролируемой детали 24 в двух направлениях. Завал детали 24 ограничивается конечными выключателями 33 и 34, сигналы с которых поступают к распределителю 31 и плате 28, то есть обеспечивается обратная связь с компьютером 29. Логические сигналы с распределителя 31 через оптронную развязку подаются на коммутатор 32, обеспечивающий необходимый уровень напряжений на обмотках шаговых электродвигателей 4 и 5. При выборе автоматического режима работы все процессы в системе контроля происходят автоматически согласно компьютерной программе.
Использование предложенного изобретения улучшило управляемость приводом вращения стола, позволило без применения механизированного привода устанавливать изготовляемое изделие на столе в требуемом положении относительно оси завала стола. А также упростило шарнирный подвес стола относительно основания, уменьшило количество используемых электродвигателей, обеспечило возможность применения вместо электродвигателей оригинальной конструкции электродвигателей выпускаемых промышленностью. Расширена область возможного применения. Например, при необходимости защиты зоны манипулирования изделием при взрывоопасных работах НМС может легко встраиваться в герметичный бокс, при этом электродвигатели будут располагаться снаружи. Это обеспечивает безопасность работы и значительно упрощает обслуживание и ремонт НМС.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕСУЩАЯ МЕХАНИЧЕСКАЯ СИСТЕМА | 2006 |
|
RU2312761C1 |
| МАНИПУЛЯТОР-ПЛАТФОРМА | 1995 |
|
RU2093344C1 |
| УНИВЕРСАЛЬНЫЙ НАСТОЛЬНЫЙ СТАНОК | 2003 |
|
RU2264889C2 |
| СПОСОБ КОНТРОЛЯ ОТКЛОНЕНИЙ ОТ ПЛОСКОСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2168150C2 |
| УСТАНОВКА ДЛЯ ПЛАЗМЕННОГО НАПЫЛЕНИЯ | 2000 |
|
RU2190035C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| МАНИПУЛЯТОР-ПЛАТФОРМА | 2005 |
|
RU2365488C2 |
| Приспособление-спутник к автоматическим линиям | 1985 |
|
SU1323343A1 |
| Шпиндельное устройство | 1982 |
|
SU1098679A1 |
| МАНИПУЛЯТОР ДЛЯ ПРЕЦИЗИОННОГО ПОЗИЦИОНИРОВАНИЯ | 2013 |
|
RU2547981C2 |
Изобретение относится к робототехнике и может быть использовано в несущих механических системах манипуляторов, предназначенных для вращения изготовляемых деталей по сложным сферическим траекториям. Несущая механическая система содержит две кинематические вращательные пары, первая из которых образована столом и платформой, а вторая - платформой и основанием, два электродвигателя и зажимное устройство. Вторая кинематическая вращательная пара снабжена двумя кронштейнами. Оба кронштейна скреплены с ее подвижными звеньями. Кронштейны выполнены таким образом, что поверхность стола, смонтированного вместе с платформой на них, расположена ниже оси вращения второй кинематической пары при ее горизонтальном расположении. Механизм привода вращения стола, кинематически связанный с зубчатым колесом, скрепленным со столом, размещен в одном из кронштейнов. Ведущий вал этого механизма, расположенный в пустотелом подвижном звене второй кинематической вращательной пары, соединен с валом электродвигателя вращения стола, смонтированного на основании. Зажимное устройство, выполненное с возможностью замены, снабжено установочной базой, обеспечивающей совмещение осей симметрии изготавливаемой детали сферической формы с осью вращения этой пары. Изобретение позволит улучшить управляемость приводом вращения стола, упростить шарнирный подвес стола относительно основания, уменьшить количество используемых электродвигателей. 6 ил.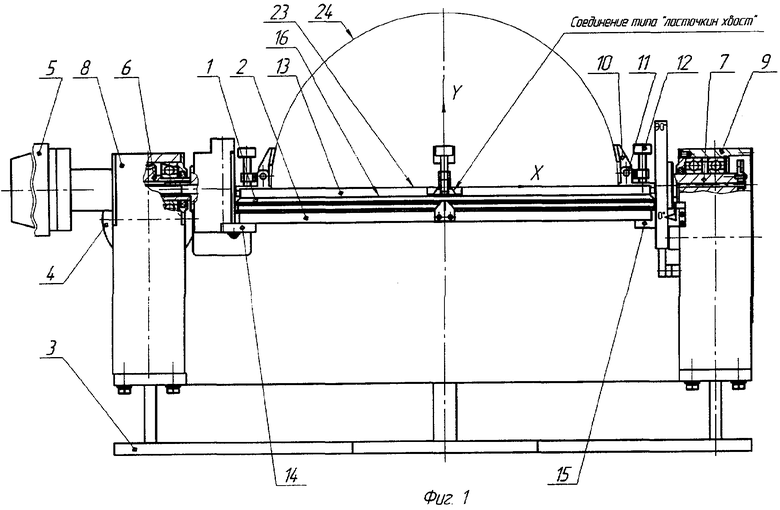
Несущая механическая система, содержащая две кинематические вращательные пары, первая из которых образована между столом и платформой, а вторая - между платформой и основанием, два электродвигателя и зажимное устройство, отличающаяся тем, что вторая кинематическая вращательная пара снабжена двумя кронштейнами, скрепленными с ее подвижными звеньями, кронштейны выполнены таким образом, что поверхность стола, смонтированного вместе с платформой на них, расположена ниже оси вращения второй кинематической пары при ее горизонтальном расположении, часть механизма привода вращения стола кинематически связана с зубчатым колесом, скрепленным со столом, и размещена в одном из кронштейнов, а его ведущий вал расположен в пустотелом подвижном звене этой пары и соединен с валом электродвигателя вращения стола, смонтированного на основании, при этом зажимное устройство выполнено с возможностью замены и снабжено установочной базой, обеспечившей совмещение осей симметрии изготовляемой детали сферической формы с осью вращения этой пары.
| МАНИПУЛЯТОР-ПЛАТФОРМА | 1995 |
|
RU2093344C1 |
| Уравновешенная манипуляционная система | 1990 |
|
SU1821354A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |

