Изобретение относится к области машиностроения, а именно к устройствам, обеспечивающим перемещение рабочего инструмента относительно обрабатываемого изделия по двум координатам, и может быть использовано при контактной обработке материалов на плоскости. Под контактной обработкой понимается такой вид обработки, при которой происходит непосредственное механическое воздействие на обрабатываемую поверхность рабочим инструментом.
Известен координатный стол (патент №2244617 от 2003.06.17), который содержит основание, состоящее из двух прямоугольных рам, средства перемещения в составе модуля продольного перемещения и модуля поперечного перемещения, систему кабель-каналов, программный блок управления и призматические борта треугольного сечения с фланцевым соединением.
Недостатками данного устройства является сложность конструкции, сложность технологии изготовления, а также большие габаритные размеры и масса.
Наиболее близким к предлагаемому техническому решению по конструкции является механический манипулятор (Н.В.Василенко, К.Д.Никитин, В.П.Пономарев, А.Ю.Смолин. Основы робототехники. - Томск.: МГП «РАСКО», 1993, с.92), который состоит из колонны, звена и «руки» манипулятора.
Недостатком данного устройства является невозможность его применения для силомоментной обработки и резке плоских материалов, а также наличие необрабатываемой зоны в месте установки манипулятора.
Под силомоментной обработкой понимается возможность сохранения необходимого момента подачи инструмента при сохранении постоянных кинематических характеристик (скорость, направление).
Цель данного изобретения состоит в повышении силомоментных показателей при обработке плоских и листовых материалов методом нанесения рельефа на изделие на основе кругового растрового изображения обрабатываемой детали различными способами (гравирование, выдавливание, сверление, фрезерование) и устранение необрабатываемой зоны в центре заготовки.
Поставленная задача достигается путем применения специально разработанного устройства для контактной обработки плоского материала, содержащего основание, которое неподвижно крепится над обрабатываемой поверхностью заготовки (не указана) либо посредством крепежных отверстий. На упорно-радиальных подшипниках качения подвижно закреплена круглая колонна, которая приводится во вращение электроприводом колонны через зубчатую кромку колонны. На оси, расположенной на круглой колонне, одним концом шарнирно закреплено звено устройства, а второй его конец через радиальные подшипники качения опирается на нижнюю поверхность опорной скобы и верхнюю поверхность круглой колонны. Опорная скоба жестко закреплена на колонне при помощи стоек. Перемещение звена манипулятора осуществляется мальтийским механизмом, который, взаимодействуя с кулачком, вращает ведомую шестерню, которая, в свою очередь, вращает ведомую шестерню, закрепленную на звене устройства, благодаря чему происходит перемещение рабочего инструмента в сквозном пазу круглой колонны, который выполнен в виде дуги, проходящей через центр круглой колонны, и расположен концентрично по отношению к оси.
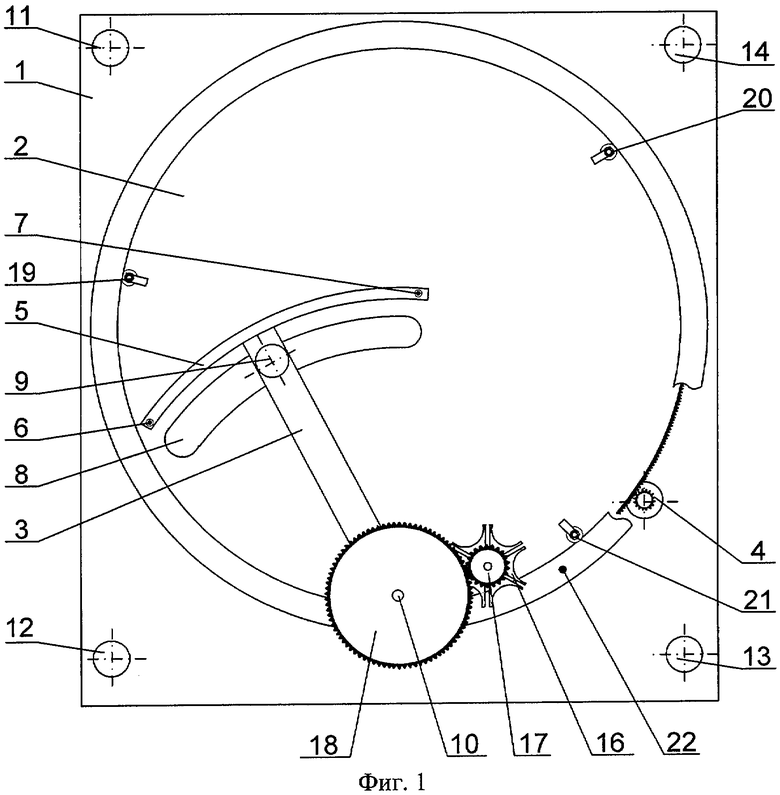
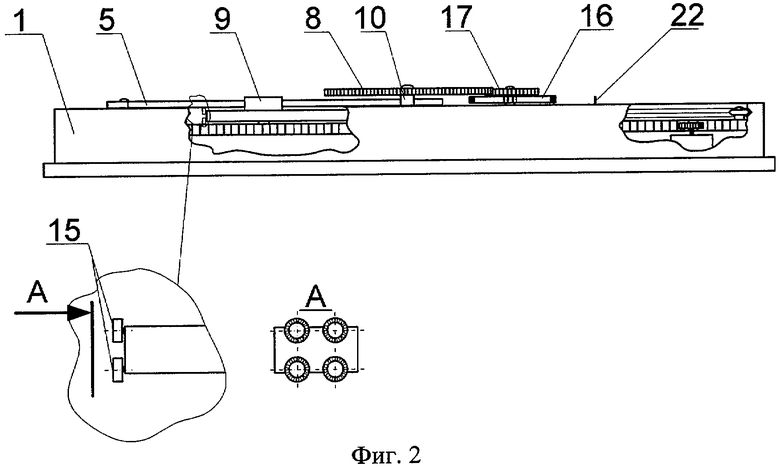
Конструкция заявляемого устройства поясняется на фиг.1 и фиг.2.
Устройство состоит из основания 1, круглой колонны 2, звена 3, электропривода колонны 4, опорной скобы 5, стоек 6, 7, сквозного паза 8, рабочего инструмента 9, оси 10, крепежных отверстий 11, 12, 13, 14, радиальных подшипников качения 15, мальтийского механизма 16, ведущей шестерни 17, ведомой шестерни 18, упорно-радиальных подшипников качения 19, 20, 21 и кулачка (кулачков) 22.
Предлагаемое устройство для контактной обработки плоского материала по сравнению с другими устройствами имеет повышенные силомоментные характеристики за счет расположения, звеньев манипулятора параллельно друг другу и применения опорной скобы, способной скомпенсировать усилия инструментальной штанги при обработке высокоплотного материала, и позволяет осуществлять обработку плоских материалов на основе кругового растрового изображения.
Устройство для контактной обработки плоского материала работает следующим образом.
Устройство укладывается на обрабатываемую поверхность (не показана) и крепится через крепежные отверстия 11, 12, 13, 14, затем электропривод колонны 4, который вращает круглую колонну 2, подвижно установленную упорно-радиальными подшипниками качения 19, 20, 21. При прохождении через точку обработки материала включается рабочий инструмент 9, после совершения одного полного оборота происходит взаимодействие мальтийского механизма 16 и кулачка 22, из-за чего через ведущую 17 и ведомую шестерню 18, звено 3, с установленным на нем рабочим инструментом 9 (гравер, перфоратор, дрель) перемещается на один шаг. При каждом последующем взаимодействии мальтийского механизма 16 и кулачка 22 происходит перемещение рабочего инструмента еще на один шаг. При непрерывном вращении круглой колонны звено манипулятора совершает движение кругами от периферии к центру, либо наоборот, благодаря такому перемещению обрабатывается вся поверхность заготовки.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2008 |
|
RU2399478C1 |
| МАНИПУЛЯТОР | 2008 |
|
RU2381891C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2006 |
|
RU2353502C2 |
| Устройство для обработки плоских поверхностей | 1985 |
|
SU1296375A1 |
| Станок-автомат для обработки плоских поверхностей | 1988 |
|
SU1553393A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Многопозиционный станок | 1980 |
|
SU891341A1 |
| Веломобиль | 1989 |
|
SU1702869A3 |
| Устройство для сборки крепежных элементов | 1981 |
|
SU973336A1 |
| РАБОЧЕЕ ОРУДИЕ | 1991 |
|
RU2046885C1 |
Изобретение относится к области машиностроения, а именно к устройствам, обеспечивающим перемещение рабочего инструмента относительно обрабатываемого изделия по двум координатам. Устройство для перемещения рабочего инструмента по двум координатам относительно плоской обрабатываемой поверхности при нанесении на нее рельефа содержит основание, имеющее крепежные отверстия для крепления на обрабатываемой поверхности. На основании закреплена вращающаяся круглая колонна с расположенной на ней осью, на которой закреплено одним концом с возможностью перемещения звено. На указанном звене установлен рабочий инструмент, расположенный в дугообразном концентричном упомянутой оси сквозном пазу. Устройство содержит опорную скобу, расположенную во взаимодействии со вторым концом звена и закрепленную посредством стоек на круглой колонне, мальтийский механизм и кулачок для обеспечения перемещения звена посредством ведущей и ведомой шестерней. Обеспечивается повышение силомоментных показателей при обработке плоских поверхностей. 2 ил.
Устройство для перемещения рабочего инструмента по двум координатам относительно плоской обрабатываемой поверхности при нанесении на нее рельефа, содержащее основание, имеющее крепежные отверстия для крепления на обрабатываемой поверхности, закрепленную на основании с возможностью вращения круглую колонну с расположенной на ней осью, закрепленное на оси одним концом с возможностью перемещения звено, на котором установлен рабочий инструмент, расположенный в дугообразном концентричном упомянутой оси сквозном пазу, опорную скобу, расположенную во взаимодействии со вторым концом звена и закрепленную посредством стоек на круглой колонне, мальтийский механизм и кулачок для обеспечения перемещения звена посредством ведущей и ведомой шестерней.
| КООРДИНАТНЫЙ СТОЛ (ВАРИАНТЫ) | 2003 |
|
RU2244617C1 |
| СТАНОК ДЛЯ ЗАТОЧКИ ИНСТРУМЕНТА ШЛИФОВАЛЬНЫМ КРУГОМШ- | 0 |
|
SU368990A1 |
| JP 58045836 A, 17.03.1983 | |||
| Мальтийский механизм | 1988 |
|
SU1545194A1 |
| МАЛЬТИЙСКИЙ МЕХАНИЗМ | 0 |
|
SU386193A1 |

