(54) УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ МАНИПУЛЯТОРА

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОИМПУЛЬСНОЙ ЗАПРЕССОВКИ ТРУБ | 1982 |
|
SU1123152A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Устройство для сборки бесфасочных пазовых соединений | 1982 |
|
SU1088911A1 |
| Устройство для ориентированной подачи рыбы к режущим инструментам | 1990 |
|
SU1750581A1 |
| Устройство для намотки ленты в рулон | 1989 |
|
SU1654204A2 |
| Установка для армирования керамических изделий | 1985 |
|
SU1346432A1 |
| Устройство для сборки деталей типа "вал-втулка | 1982 |
|
SU1038166A1 |
| Перегрузчик формодержателей | 1980 |
|
SU1006164A1 |
| Устройство для ориентирования деталей | 1978 |
|
SU751574A1 |
| Устройство для автоматической сборки составных частей химических источников тока | 1991 |
|
SU1790016A1 |

I
Изобретение относится к машиностроению и может быть использовано в качестве механизма ориентации манипулятора для автоматической подачи деталей в отверстия изделия.
Известно устройство ориентации манипулятора, содержащее корпус с подвижной платформой и привод 1.
Однако известное устройство не позволяет произвести надежное и бездефектное сопряжение деталей, одна из которых выполнена из легко деформируемого материала, например из полиэтилена, и имеет повышенньш изгиб и малую жесткость относительно продольной оси.
Цель изобретения - повышение надежности бездефектного сопряжения легкодеформируемой детали с изделием.
Поставленная цель достигается тем, что известное устройство снабжено расположенными в корпусе направляющими и механизмом центрирования, включающим не менее трех шарнирно связанных с подвижной платформой двуплечих рычагов и диск, снабженный упорами и кинематически связанный с одним плечом каждого из двуплечих
рычагов, причем диск установлен в упомянутых направляющих.
Кроме того, устройство снабжено механизмом фиксации, содержащим пальцы и кулачки, кинематически связанные с приводом.
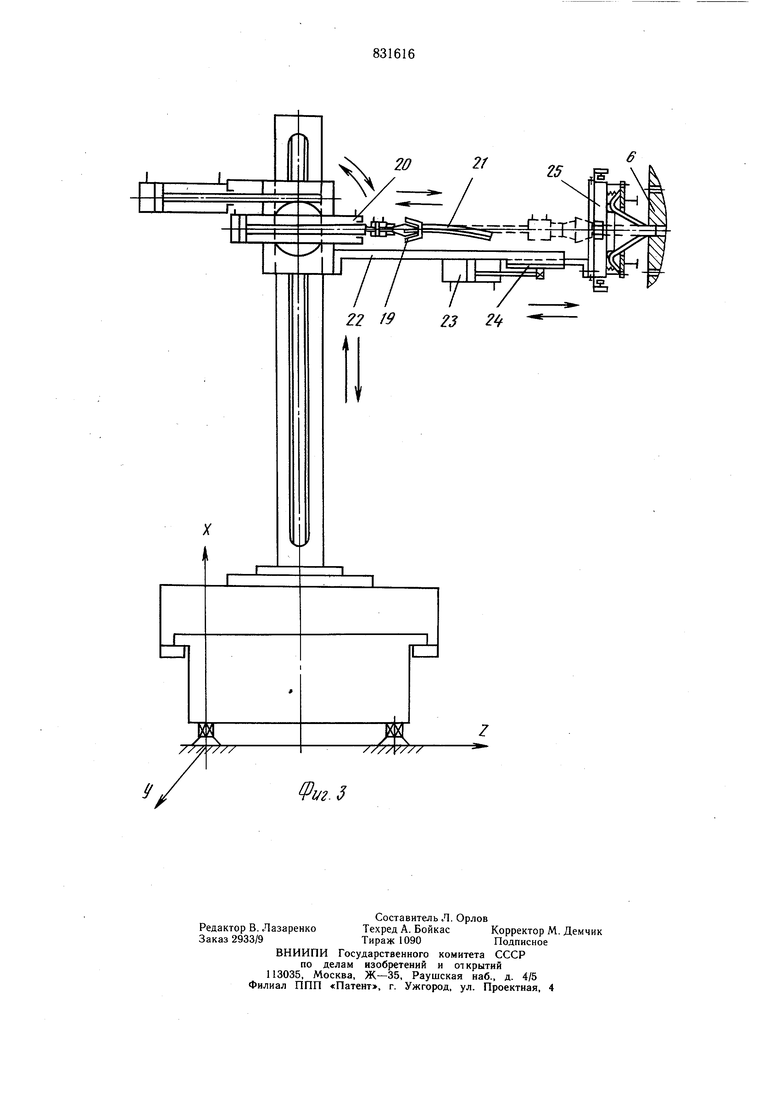
На фиг. 1 изображено устройство ориентации; на фиг. 2 - узел 1 на фиг. 1; на фиг. 3 - манипулятор, общий вид.
Устройство (фиг. 1) содержит корпус 1, подвижную платформу 2, двуплечие рычаги 3, установленные в пазах на осях 4 подвижной платформы 2 под углом 120° по отношению друг к другу. Рычаги сведены пружинами 5 до соприкосновения концов рабочих плеч, которые образуют конусную поверхность, входящую в отверстие изделия 6.
Концы вторых плеч рычагов 3 опираются на базовую поверхность диска 7 и могут перемещаться по его поверхности. Диск 7 снабжен упорами 8 и подвижно соединен с направляющими 9 корпуса 1.
Подвижная платформа 2 связана с корпусом 1 с помощью пружин 10 и опирается на щаровую опору 11. В направляющих отверстиях корпуса 1 установлены три подвижных пальца 12, опирающихся на торцовую поверхность подвижной платформы 2. Пальцы 12 расположены против кулачков 13 (фиг. 2), которые закреплены на шестерне 14. Шестерня 14 вращается на подщипнике 15 и находится в зацеплении с рейкой 16 штока гидроцилиндра.
В отверстиях корпуса 1, расположенных радиально, установлень штоки 17 против конечных выключателей 18. Исполнительный орган манипулятора (фиг. 3), включающий схват 19 и механизм 20 подачи детали 21 в отверстие изделия 6, установлен на кронштейне 22, к которому прикреплен гидроцилиндр 23, щток которого связан с направля(ошими 24. Рычаги 3 образуют направляющий конус 25. Грубое ориентирование устройства ориентации относительно отверстия изделия с точностью до полдиаметра отверстия осуществляется с помощью системы управления вертикальным и горизонтальным перемещениями звеньев манипулятора.
Устройство для ориентации манипулятора работает следующим образом.
В результате грубого ориентирования рабочие плечи рычагов 3 заходят в отверстие изделия 6, после чего устройство ориентации осуществляет точное ориентирование исполнительного органа.
Гидроцилиндр 23 сообщает устройству ориентации движение по направляющим 24 в положительном направлении оси Z в отверстие. Упоры 8 упираются в поверхность изделия и через диск 7 нажимают на вторые плечи рычагов 3, которые раскрывают рабочие плечи рычагов до тех пор, пока все три рабочих плеча не войдут в соприкосновение с поверхностью изделия, т.е. до точного центрирования.
Поскольку рычаги 3 жестко закреплены на платформе 2, она перемещается вместе с ними до точного центрирования в любом направлении в плоскости ОХУ и замыкает через щток 17 один из конечных выключателей 18, с помощью которого подключается привод исполнительной системы управления манипулятора, в результате чего исполнительный орган с деталью центрируются по оси отверстия.
При этом платформа 2 с рычагами 3 также центрируется по оси отверстия изделия, затем это положение платформы фиксируется: при вращении шестерни 14 скощенные поверхности кулачков 13 упираются в пальцы 12, которые прижимают платформу 2 к плоскости корпуса I.
Затем устройство ориентации с помощью гидроцилиндра 23 отводится от изделия по
направляющим 24 и фиксируется в точно ориентированном положении. При отводе рычаги 3, опирающиеся вторыми плечами на базовую поверхность диска 7, перемещающегося по направляющим 9, под действием пружин 5 сходятся, и рабочие плечи
рычагов образуют конус 25, ось которого совпадает с осью отверстия.
Затем исполнительный орган подает деталь 21 через направляющий конус 25, раздвигая рабочие плечи рычагов 3 устройства
для ориентации, выставленного по оси отверстия. Плечи рычагов 3, раскрываясь, центрируют деталь, обеспечивая надежное сопряжение детали с изделием.
Использование предлагаемого устройства в качестве механизма для ориентации манипулятора позволяет значительно повысить надежность сопряжения деталей, сократить время, затрачиваемое на многократное сопряжение больщого количества деталей с изделием, тем самым значительно увеличить экономический эффект применения манипулятора.
Формула изобретения
1- Устройство для ориентации манипулятора, содержащее корпус с подвижной плат,формой и привод, отличающееся тем, что, с целью повышения надежности работы, оно снабжено, расположенными в корпусе направляющими и механизмом центрирования,
включающим не менее трех щарнирно связанных с подвижной платформой двуплечих рычагов и диск, снабженный упорами и кинематически связанный с одним плечом каждого из двуплечих рычагов, причем диск установлен в упомянутых направляющих.
принятые во внимание при экспертизе
/J
fpue.J
Ш.З
7
