Изобретение относится к железнодорожной технике, а именно к железнодорожной автоматике и телемеханике для регулирования движения поездов.
Известен способ и реализующие его устройства, использующие в качестве признака полноты состава число осей в поезде [Бухольц В.П. и др. Путевые датчики контроля подвижного состава на рельсовом транспорте. М.: Транспорт, 1976. С.80-82]. Принцип их работы основан на том, что при входе поезда на контролируемый участок пути производится подсчет числа осей поезда. Прохождение каждой оси фиксируется за счет воздействия колеса на путевой датчик.
Недостатком данного способа и устройства является высокое требование к достоверности передаваемой информации по линейной цепи.
Данные устройства выбраны в качестве прототипа.
Техническим результатом является повышение надежности работы устройства для контроля свободности путевого участка.
Технический результат достигается тем, что в способе контроля свободности путевого участка, заключающемся в контроле проследования одного колеса оси подвижного состава путевым датчиком, контролируют проследование двух колес оси подвижного состава, фиксируя занятие путевого участка, и контролируют вагонный имитатор колеса в качестве метки хвоста подвижного состава одним из путевых датчиков, фиксируя освобождение предыдущего путевого участка.
Устройство контроля свободности путевого участка, состоящее из путевого магнитного датчика каждого из участков контроля, размещенного возле одного из рельсов, дополнено вагонным имитатором колеса в качестве метки хвоста подвижного состава, закрепленным на последней тележке подвижного состава, путевым магнитным датчиком каждого из участков контроля, размещенным возле другого рельса, линейными проводами, трансформаторным ящиком каждого из участков контроля, в котором размещены реле каждого из датчиков, линейным реле, путевым реле, при этом линейное реле каждого участка контроля через линейные провода, фронтовые контакты реле контроля левого датчика и тыловые контакты реле контроля правого датчика соединено с полюсами источника питания впереди лежащего участка контроля, обмотка путевого реле каждого участка контроля соединена с полюсами источника питания через замкнутый фронтовой контакт линейного реле или тыловые контакты реле контроля датчиков правой и левой сторон колесных пар подвижного состава и замкнутый свой собственный фронтовой контакт.
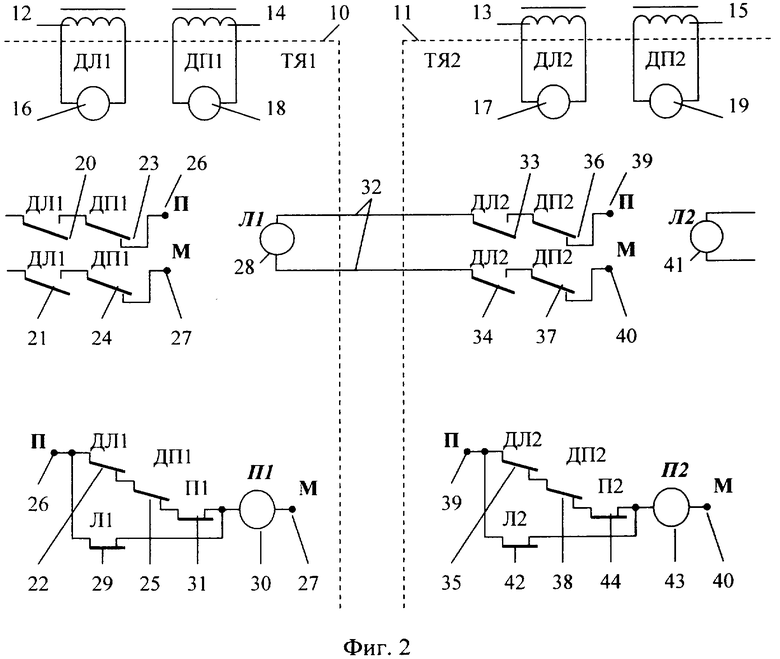
На фиг.1 представлена схема устройства контроля путевого участка, на фиг.2 представлена схема включения путевых реле.
На фиг.1 изображены: три смежных путевых участка 1, 2, 3, контролируемый подвижной состав 4, путевые магнитные датчики левой стороны колесных пар подвижного состава 5, 6, путевые магнитные датчики правой стороны колесных пар подвижного состава 7, 8, вагонный имитатор колеса 9, трансформаторные ящики 10, 11.
На фиг.2 изображены: катушки 12, 13 датчиков 5, 6, катушки 14, 15 датчиков 7, 8, реле ДЛ1 16 контроля датчика левой стороны 5, реле ДП1 18 контроля датчика правой стороны 7, реле ДЛ2 17 контроля датчика левой стороны 6, реле ДП2 19 контроля датчика правой стороны 8, контакты реле ДЛ1 20, 21, 22, контакты реле ДП1 23, 24, 25, плюсовой полюс источника питания 26, минусовой полюс источника питания 27, обмотка линейного реле Л1 28, контакт реле Л1 29, обмотка путевого реле П1 30, контакт реле П1 31, линейные провода 32, контакты реле ДЛ2 33, 34, 35, контакты реле ДП2 36, 37, 38, плюсовой полюс источника питания 39, минусовой полюс источника питания 40, обмотка линейного реле Л2 41, контакт реле Л2 42, обмотка путевого реле П2 43, контакт реле П2 44.
На границах путевых участков 1, 2, 3 размещены трансформаторные ящики 10, 11 и путевые магнитные датчики 5, 6 (возле левого рельса), напротив них возле правого рельса размещены путевые магнитные датчики 7; 8, вагонный имитатор колеса 9 размещен на последней тележке подвижного состава 4 слева по следу колеса, выводы катушки 12 датчика 5 соединены с выводами обмотки 16 реле ДЛ1, выводы катушки 14 датчика 7 соединены с выводами обмотки 18 реле ДП1, выводы катушки 13 датчика 6 соединены с выводами обмотки 17 реле ДЛ2, выводы катушки 15 датчика 8 соединены с выводами обмотки 19 реле ДП2, плюсовой полюс 26 источника питания соединен с тыловым контактом реле ДП1, общий контакт 23 которого соединен с фронтовым контактом реле ДЛ1, общий контакт 20 которого соединен с прямым линейным проводом (не показан), обратный линейный провод (не показан) соединен с общим контактом 21 реле ДЛ1, фронтовой контакт которого соединен с общим контактом 24 реле ДП1, тыловой контакт которого соединен с минусовым полюсом источника питания 27, плюсовой полюс источника питания 39 соединен с тыловым контактом реле ДП2, общий контакт 36 которого соединен с фронтовым контактом реле ДЛ2, общий контакт 33 которого соединен с одним из линейных проводов 32, который соединен с одним из выводов обмотки 28 реле Л1, второй вывод которой соединен со вторым из линейных проводов 32, который соединен с общим контактом 34 реле ДЛ2, фронтовой контакт которого соединен с общим контактом 37 реле ДП2, тыловой контакт которого соединен с минусовым полюсом 40 источника питания, выводы обмотки 41 реле Л2 соединены с прямым и обратным линейными проводами (не показаны), плюсовой полюс 26 источника питания соединен с общим контактом 29 реле Л1, фронтовой контакт которого соединен с одним из выводов обмотки 30 реле П1, и общим контактом 22 реле ДЛ1, тыловой контакт которого соединен с общим контактом 25 реле ДП1, тыловой контакт которого соединен с общим контактом 31 реле П1, фронтовой контакт которого соединен с фронтовым контактом реле Л1 и также одним из выводов обмотки 30 реле П1, второй вывод которой соединен с минусовым полюсом 27 источника питания, плюсовой полюс 39 источника питания соединен с общим контактом 42 реле Л2, фронтовой контакт которого соединен с одним из выводов обмотки 43 реле П2, и общим контактом 35 ДЛ2, тыловой контакт которого соединен с общим контактом 38 реле ДП2, тыловой контакт которого соединен с общим контактом 44 реле П2, фронтовой контакт которого соединен с фронтовым контактом реле Л2 и также одним из выводов обмотки 43 реле П2, второй вывод которой соединен с минусовым полюсом 40 источника питания.
Работа устройства происходит следующим образом: при занятости путевого участка 1 и вступлении подвижного состава 4 на путевой участок 2 колесные пары начинают воздействовать одновременно на правый 7 и левый 5 напольные магнитные датчики, наводя в катушках 12 и 14 ЭДС, за счет чего возбуждаются реле ДП1 18 и ДЛ1 16, расположенные в трансформаторном ящике ТЯ1 10, своими тыловыми контактами 22 и 25 размыкая цепь питания путевого реле П1 30, которое обесточивается. При занятости путевого участка 2 и вступлении подвижного состава 4 на путевой участок 3 колесные пары начинают воздействовать одновременно на правый 8 и левый 6 напольные магнитные датчики, наводя в катушках 13 и 15 ЭДС, за счет чего возбуждаются реле ДП2 19 и ДЛ2 17, расположенные в трансформаторном ящике ТЯ2 11, своими тыловыми контактами 35 и 38 размыкая цепь питания путевого реле П2 43, которое обесточивается.
При освобождении путевого участка 2 хвостом подвижного состава 4 вагонный имитатор колеса 9 воздействует на напольный магнитный датчик 6, возбуждая реле ДЛ2 17, при этом реле ДП2 19 остается обесточенным. Через линейные провода 32, контакты 33, 34 реле ДЛ2, контакты 36, 37 реле ДП2 замыкается цепь питания линейного реле Л1 28, которое своим контактом 29 замыкает цепь питания реле П1 30 от плюсового полюса источника питания 26 к минусовому 27. Реле П1 30 встает на самоблокировку через свой контакт 31 и контакты 22 и 25 обесточенных реле ДЛ1 16 и ДП1 18. При освобождении путевого участка 3 хвостом подвижного состава 4 вагонный имитатор колеса 9 воздействует на напольный магнитный датчик освобождения путевого участка 3 (не показан), возбуждая реле ДЛЗ (не показано), при этом реле ДПЗ (не показано) остается обесточенным. Замыкается цепь питания линейного реле Л2 41, которое своим контактом 42 замыкает цепь питания реле П2 43 от плюсового полюса источника питания 39 к минусовому 40. Реле П2 43 встает на самоблокировку через свой контакт 44 и контакты 35 и 38 обесточенных реле ДЛ2 17 и ДП2 19. Работа схемы при освобождении путевого участка 1 и замыкании цепи питания линейного реле (не показано) через замкнутые контакты 20, 21 реле ДЛ1 и контакты 23, 24 реле ДП1 происходит аналогично.
Применение данного изобретения позволит повысить надежность работы устройства для контроля свободности путевого участка, что обеспечит повышение безопасности движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ ОСВОБОЖДЕНИЯ ПЕРЕГОНА | 2004 |
|
RU2270123C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРЕЛКАМИ С МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИЕЙ | 2004 |
|
RU2264941C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТРЕЛОЧНЫМ ПЕРЕВОДОМ | 1994 |
|
RU2089425C1 |
| Устройство управления стрелочным переводом | 1989 |
|
SU1684146A1 |
| Устройство для управления стрелочным электроприводом | 1990 |
|
SU1799783A1 |
| РЕЛЬСОВАЯ ЦЕПЬ | 2003 |
|
RU2250849C1 |
| РЕЛЬСОВАЯ ЦЕПЬ | 2000 |
|
RU2183575C2 |
| УСТРОЙСТВО ДЛЯ ИСКЛЮЧЕНИЯ ПРОЕЗДА ЗАПРЕЩАЮЩЕГО СИГНАЛА | 2000 |
|
RU2186699C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТРЕЛКОЙ | 1995 |
|
RU2099228C1 |
| УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЙ РАЗВЕТВЛЕННОЙ РЕЛЬСОВОЙ ЛИНИИ | 2019 |
|
RU2714828C1 |
Изобретение относится к железнодорожной технике, а именно к железнодорожной автоматике и телемеханике для регулирования движения поездов. Способ контроля свободности путевого участка заключается в том, что контролируют проследование двух колес оси подвижного состава, фиксируя занятие путевого участка, и контролируют вагонный имитатор колеса в качестве метки хвоста подвижного состава одним из путевых датчиков, фиксируя освобождение предыдущего путевого участка. Устройство контроля свободности путевого участка состоит из путевых магнитных датчиков каждого из участков контроля, который размещен возле каждого из рельсов, вагонный имитатор колеса в качестве метки хвоста подвижного состава, который закреплен на последней тележке подвижного состава, линейных проводов, трансформаторного ящика каждого из участков контроля, в котором размещены реле каждого из датчиков, линейное реле, путевое реле. При этом линейное реле каждого участка контроля соединено с полюсами источника питания впереди лежащего участка контроля через линейные провода. Фронтовые контакты реле контроля левого датчика и тыловые контакты реле контроля правого датчика, обмотка путевого реле каждого участка контроля соединена с полюсами источника питания через замкнутый фронтовой контакт линейного реле или тыловые контакты реле контроля датчиков правой и левой сторон колесных пар подвижного состава и замкнутый свой собственный фронтовой контакт. Техническим результатом является повышение надежности работы устройства для контроля свободности путевого участка. 2 н.п. ф-лы, 2 ил.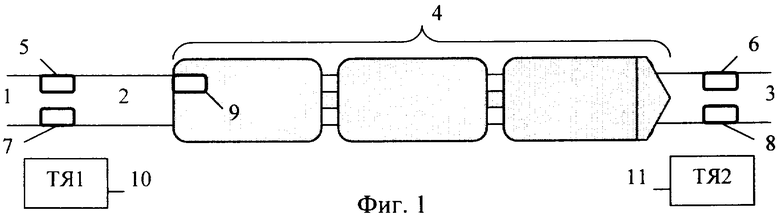
1. Способ контроля свободности путевого участка, заключающийся в контроле проследования одного колеса оси подвижного состава путевым датчиком, отличающийся тем, что контролируют проследование двух колес оси подвижного состава, фиксируя занятие путевого участка, и контролируют вагонный имитатор колеса в качестве метки хвоста подвижного состава одним из путевых датчиков, фиксируя освобождение предыдущего путевого участка.
2. Устройство контроля свободности путевого участка, состоящее из путевого магнитного датчика каждого из участков контроля, размещенного возле одного из рельсов, отличающееся тем, что дополнительно содержит вагонный имитатор колеса в качестве метки хвоста подвижного состава, который закреплен на последней тележке подвижного состава, путевой магнитный датчик каждого из участков контроля, который размещен возле другого рельса, линейные провода, трансформаторный ящик каждого из участков контроля, в котором размещены реле каждого из датчиков, линейное реле, путевое реле, при этом линейное реле каждого участка контроля соединено с полюсами источника питания впереди лежащего участка контроля через линейные провода, фронтовые контакты реле контроля левого датчика и тыловые контакты реле контроля правого датчика, обмотка путевого реле каждого участка контроля соединена с полюсами источника питания через замкнутый фронтовой контакт линейного реле или тыловые контакты реле контроля датчиков правой и левой сторон колесных пар подвижного состава и замкнутый свой собственный фронтовой контакт.
| WO 2006125595, 30.11.2006 | |||
| ПУТЕВОЙ ДАТЧИК ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОСИ КОЛЕСА И СЧЕТА ОСЕЙ | 2000 |
|
RU2206469C2 |
| RU 2075416 C1, 20.03.1997 | |||
| Испытательная машина | 1959 |
|
SU130226A1 |

