Изобретение относится к области навигации летательных аппаратов (ЛА) с использованием комплексного способа навигации, функционально объединяющего инерциальный способ навигации, спутниковый способ навигации и воздушно-скоростной способ навигации, а также к навигационным приборам для контроля и управления летательными аппаратами.
Известна малогабаритная бесплатформенная инерциальная навигационная система (БИНС) средней точности, корректируемая от системы воздушных сигналов, описанная патенте №2502049, опубл. 20.12.2013, бюл. №35, принятая за прототип.
Система содержит, в частности, блок чувствительных элементов (ЧЭ) средней точности, состоящий из трех акселерометров и трех датчиков угловой скорости по трем ортогональным осям, две вычислительные платформы, систему воздушных сигналов, блок определения ошибки курса, блок определения скорости ветра, связанный с системой спутниковой навигации.
БИНС средней точности реализуют две вычислительные навигационные платформы, каждая из которых имеет свой закон управления (демпфирование инерциальных ошибок), зависящий от параметров движения носителя, а именно от составляющих горизонтальных ускорений носителя. При этом первая платформа обеспечивает счисление углов тангажа и крена носителя, тогда как вторая - угла курса и счисление проекций скоростей носителя и его географических координат с учетом предварительно определенных и сохраненных оценок скорости ветра и его направления. Каждая из платформ имеет свой закон управления. Одна из них является традиционной невозмущаемой вычислительной платформой, но с демпфированием по собственным ускорениям. Вторая осуществляет демпфирование ошибок по разности показаний скоростей измеряемых инерциальной навигационной системой ИНС и системой воздушных сигналов (СВС). При этом предварительно при наличии сигналов СНС определяют ошибку не выставки ИНС в азимуте, скорость и направление ветра.
В известном изобретении недостаточно уделено внимание вопросам достоверности информации и надежности малогабаритного навигационного комплекса (МНК). Опыт эксплуатации СНС показывает, что на практике инерциально-спутниковые комплексы используют недостоверную информацию от приемников СНС и, как результат, происходит сбой в работе комплекса. Следует отметить, что определение курса ЛА по сигналам СНС и СВС дает не достаточно высокую точность, что обуславливает появление дополнительной погрешности при счислении координат ЛА. Отказ навигационного комплекса или источников питания приводит к потери всех навигационных измерений.
Целью заявляемого изобретения есть расширение функциональных возможностей, повышение надежности работы и повышение точности определения навигационных параметров в случае пропадания сигналов от приемника СНС.
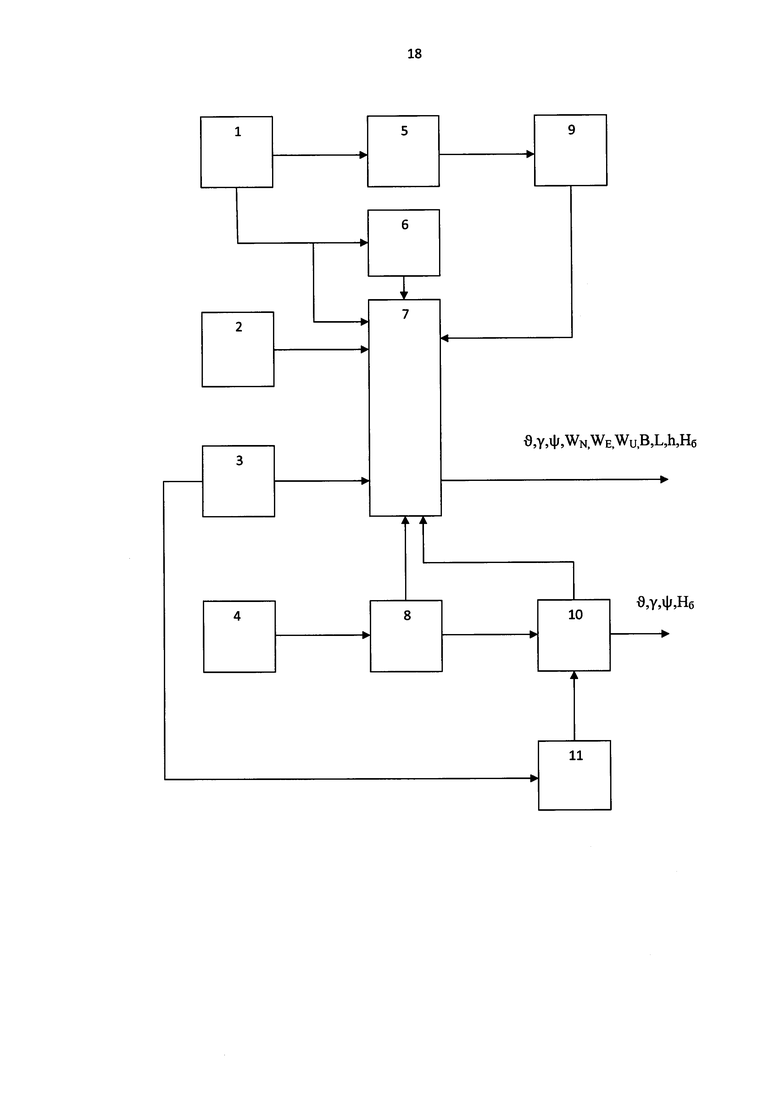
Поставленная цель достигается путем использования МНК, содержащего интегрированный блок датчиков (ИБД), систему воздушных сигналов (СВС), вычислительный блок и приемник спутниковой навигационной системы (ПСНС), в который дополнительно введены трехкомпонентный магнитометрический датчик (ТМД), концевой выключатель обжатия стойки шасси, блок определения достоверности сигналов СНС, блок определения коэффициентов девиации (БОКД), блок определения курса (БОК) ЛА, блок резервной навигации (БРН), блок адаптации к турбулентности (БАТ), второй выход ПСНС, выход ИБД и первый выход СВС подключены к первым вторым и третьим входам вычислительного блока, второй выход ПСНС подключен к входу блока определения достоверности сигналов СНС, к четвертому входу вычислительного блока подключены последовательно соединенные ТМД и БОКД, к пятому входу вычислительного блока подключен первый выход БРН, к шестому входу вычислительного блока подключены последовательно соединенные БОК, концевой выключатель обжатия стойки шасси, вход которого соединен с первый выходом ПСНС, к седьмому входу подключен выход блока определения достоверности сигналов СНС, ко второму выходу СВС подключены последовательно соединенные БАТ и БРН, ко второму выходу БОКД подключен второй вход БРН, выходом МНК в основном и альтернативном режимах является выход вычислительного блока, в резервном режиме - второй выход БРН.
Сущность изобретения поясняется чертежом, на котором представлена структурная схема заявляемого устройства.
Устройство содержит приемник 1 спутниковой навигационной системы (ПСНС), интегрированный блок 2 датчиков, система 3 воздушных сигналов, трехкомпонентный магнитометрический датчик 4, концевой выключатель 5 обжатия стойки шасси, блок 6 определения достоверности сигналов СНС, вычислительный блок 7, блок 8 определения коэффициентов девиации МД, блок 9 определения курса (БОК) ЛА, блок 10 резервной навигации (БРН), блок 11 адаптации к турбулентности (БАТ).
Выходными сигналами устройства являются углы пространственной ориентации ЛА, составляющие скорости от СНС и геодезические широта, долгота и высота. Ниже приведено описание работы МНК.
В блоке 9 определения курса на этапе руления и разбега осуществляют определение путевого угла ЛА по сигналам СНС. Измеренный путевой угол до момента отрыва ЛА от ВПП является истинным курсом ЛА, по которому выставляют начальный курс ЛА:
где WN и WE - земные скорости ЛА в направлении северного меридиана и восточной параллели, получаемые от СНС.
Момент отрыва ЛА от ВПП фиксируется концевым выключателем обжатия стойки шасси 5, которая дает команду на фиксирование значения курса ЛА.
После набора высоты совершают полный круг над аэродромом или в заданной зоне, где отсутствуют магнитные аномалии, с постоянным углом крена, в процессе которого в блоке 8 определения коэффициентов девиации МД запоминаются значения измеренного магнитного курса при помощи ТМД 4 от  . Используя полученные измерения, определяют коэффициенты магнитной девиации магнитометрического датчика. Определение коэффициентов девиации, представляющих собой шесть параметров Пуассона, осуществляют способом, приведенным в работе [1]. При этом используют упрощенную модель, которая позволяет учесть влияние второй по значимости четвертной девиации на ошибку определения магнитного курса.
. Используя полученные измерения, определяют коэффициенты магнитной девиации магнитометрического датчика. Определение коэффициентов девиации, представляющих собой шесть параметров Пуассона, осуществляют способом, приведенным в работе [1]. При этом используют упрощенную модель, которая позволяет учесть влияние второй по значимости четвертной девиации на ошибку определения магнитного курса.
Упрощенные уравнения Пуассона

где

Коэффициенты p, q, r учитывают магнитное поле твердого в магнитном отношении железа, образующего постоянное магнитное поле ЛА и сохраняющего свой магнетизм за счет большой коэрцитивной силы. Коэффициенты a, b, d, e учитывают магнитное поле мягкого в магнитном отношении железа ЛА, образующего переменное магнитное поле, зависящее от курса, не сохраняющего свой магнетизм за счет малой коэрцитивной силы и вызывающего переменное индуктивное магнитное поле ЛА. Задача определения и компенсации девиации магнитометрических датчиков решают методом итерации. Полный алгоритм определения и списания девиации приведен в работе [1].
В основном режиме в вычислительном блоке 6 МНК используют сигналы от приемника 1 СНС для коррекции углов пространственной ориентации, значения земных скоростей и координат местоположения ЛА, определенных по сигналам ИБД 2. При этом минимизируя разности скоростей и координат местоположения, вычисленных при помощи СНС и по сигналам ИБД, используя разомкнутую схему фильтрации Калмана, оценивают погрешности определения координат, скоростей, углов пространственной ориентации и погрешности инерциальных датчиков ИБД.
Оцениваемые параметры входящие в вектор X:

где ΔB, ΔL, Δh - ошибки определения геодезической широты, долготы и высоты ЛА,
ΔVN, ΔVE, ΔVU - ошибки определения проекций земных скоростей ЛА,
Ψ1, Ψ2, Ψ2 - ошибки определения углов вычислительной (платформенной) системы координат относительно навигационной СК,
Δax, Δay, Δaz, δax, δay, δaz - постоянные и случайные составляющие погрешностей датчиков линейных ускорений,
Δωx, Δωy, Δωz, δωx, δωy, δωz - постоянные и случайные составляющие погрешностей датчиков угловых скоростей.
Выражения, описывающие Фильтр Калмана, приведены ниже:






В процессе работы приемника СНС в блоке 5 проверки достоверности сигналов осуществляют непрерывный контроль достоверности сигналов от приемников СНС. Контроль выходных параметров СНС производят на двух уровнях.
На первом уровне ("грубый контроль") определяют широту, долготу и высоту с заданной точностью. При этом пороги по координатам определяют, исходя из области, ограниченной максимально возможной дальностью и высотой полета. Пороги по скорости контролируют по модулю скорости, которая должна находиться в пределах эксплуатационного диапазона.
На втором уровне производят контроль на скользящем интервале наблюдений, где осуществляют контроль измерений скорости, используя сдвигающий буфер BV типа «бегущей строки», в котором хранятся последние N измерений модуля скорости. При поступлении нового измерения происходит сдвиг содержимого и вычисление вариации модуля скорости, при этом, в случае превышения вариацией модуля скорости заданного порога δ|V|>Por(V), формируется признак неисправности Pr=1. Контроль измерения координат осуществляют путем определения приращения пути, используя сдвигающий буфер BD типа «бегущей строки», в котором хранятся последние N измерений приращения пути. При поступлении нового измерения происходит сдвиг содержимого и вычисление вариации приращения пути. В случае превышения вариацией приращения пути заданного порога δD>Por(D), формируется признак неисправности Pr=1. Контроль выдачи одних и тех же их значений параметров от СНС осуществляют до "n" совпадений, при достижении которого формируется признак неисправности Pr=1. Полный алгоритм определения достоверности сигналов от приемника СНС приведен в работе [2].
Одновременно в вычислительном блоке 7 определяются проекции скорости ветра, воздушной скорости, счисление текущих координат по сигналам воздушной скорости и барометрическая высота по сигналам СВС 3. Алгоритмы оценивания погрешностей воздушной скорости и определения ветра приведены в работе [5].
Альтернативный режим включается при отсутствии достоверных сигналов от приемника СНС. В этом случае в уравнениях невязки ФК значения скоростей и координат от СНС замещаются скорректированными на текущий момент значениями воздушной скорости и высоты. Для вычисления земной скорости используются последние вычисленные значения проекций скорости ветра на момент отключения СНС.




Расчет скорости ветра:







Резервный режим работает в горячем резерве. В процессе нормальной работы осуществляется проверка достоверности значений углов пространственной ориентации по сигналам БРН, который имеет свой аварийный источник питания. Курс определяется по сигналам от магнитного датчика с учетом коэффициентов магнитной девиации. Высота определяется по датчику барометрической высоты БРН.
В работе БРН используют две модели ориентации. Модель 1 предназначена для учета изменения ориентации аппарата на шагах дискретизации измерений гироскопов. Она является динамической, детерминированной и представлена в параметрах Родрига-Гамильтона:






Здесь qi - кватернион ориентации аппарата; qωi - кватернион угловых скоростей; i - номер дискретного момента времени; Δt - шаг дискретизации измерений; q0 - кватернион ориентации для начального момента времени.
Кватернион q определяет ориентацию связанной системы координат аппарата относительно инерциальной системы координат, роль которой играет нормальная земная система координат. С точки зрения теории бесплатформенных инерциальных систем соотношения являются одношаговым алгоритмом ориентации.
Модель 2 предназначена для коррекции модели 1. Вектор состояния модели 2 учитывает три компоненты - крен, тангаж и скорость аппарата относительно земли. Ее вектор состояния подлежит оцениванию по текущим значениям сигналов от акселерометров. Модель 2 является стохастической и статической, поскольку ее состояние учитывается для текущего момента дискретного времени ti. Соотношения для модели 2 имеют вид

 .
.
Здесь xi - вектор состояния;  - его априорное нормальное распределение; V - земная скорость; wi - вектор возмущений; xiq - вспомогательный вектор,
- его априорное нормальное распределение; V - земная скорость; wi - вектор возмущений; xiq - вспомогательный вектор,
рассчитываемый по кватерниону ориентации модели 1 с помощью матрицы A поворота связанной системы координат относительно инерциальной
ϑ=arcsin(a(1,2)), γ=-acrtg(a(3,2)/a(2,2)).
Обозначим  - априорное нормальное распределение вектора состояния модели 2 для момента времени ti;
- априорное нормальное распределение вектора состояния модели 2 для момента времени ti;  - апостериорное распределение, подлежащее оцениванию;
- апостериорное распределение, подлежащее оцениванию;  - априорное распределение для следующего момента времени ti+1. Тогда алгоритм БРН, решаемый на одном интервале дискретизации измерений Δt, представляется в виде последовательности следующих шагов.
- априорное распределение для следующего момента времени ti+1. Тогда алгоритм БРН, решаемый на одном интервале дискретизации измерений Δt, представляется в виде последовательности следующих шагов.
Шаг 1. Определение статистик апостериорной плотности  вектора состояния модели 2 с учетом
вектора состояния модели 2 с учетом  и текущих измерений гироскопов и акселерометров.
и текущих измерений гироскопов и акселерометров.
Шаг 2. Расчет оценки кватерниона ориентации  .
.
Шаг 3. Вычисление априорного кватерниона ориентации  для следующего момента дискретного времени.
для следующего момента дискретного времени.
Шаг 4. Вычисление статистик априорной плотности 
Остановимся на особенностях выполнения вычислений на шаге 1 и шаге 4.
1. Определение статистик апостериорной плотности  имеет вид известных соотношений байесовского оценивания вектора состояния по вектору его дискретных измерений.
имеет вид известных соотношений байесовского оценивания вектора состояния по вектору его дискретных измерений.



Здесь  - оценка вектора наблюдений, которая имеет вид
- оценка вектора наблюдений, которая имеет вид

4. Вычисление статистик априорной плотности  включает в себя расчет априорного математического ожидания и ковариационной матрицы. Априорное математическое ожидание компоненты скорости определяется с учетом допущения о постоянстве скорости и принимается равным ее оценке:
включает в себя расчет априорного математического ожидания и ковариационной матрицы. Априорное математическое ожидание компоненты скорости определяется с учетом допущения о постоянстве скорости и принимается равным ее оценке: . Априорные математические ожидания тангажа и крена
. Априорные математические ожидания тангажа и крена  ,
,  вычисляются по кватерниону
вычисляются по кватерниону  Априорная ковариационная матрица приближенно принимается равной апостериорной ковариационной матрице:
Априорная ковариационная матрица приближенно принимается равной апостериорной ковариационной матрице:  . Применение более сложных соотношений для ее расчета представляется неоправданным в силу приближенности модели 2.
. Применение более сложных соотношений для ее расчета представляется неоправданным в силу приближенности модели 2.
Указанные вычисления выполняются на каждом шаге Δt по мере поступления новых измерений гироскопов и акселерометров. В резервном режиме определяются курс, крен, тангаж и барометрическая высота ЛА. Полные алгоритмы адаптивной инерциальной курсовертикали, работы БРН приведены в работе [3, 4].
В блоке 11 осуществляется оптимизация адаптации к турбулентности. Полные выражения для перегрузок, зависящих от параметров полета ЛА:



Степень влияния слагаемых в правых частях (1) зависит от режима полета. На режиме прямолинейного горизонтального полета с постоянной скоростью имеет место nx=sin(ϑ), ny=cos(ϑ)cos(γ), nz=-cos(ϑ)sin(γ). Данные соотношения используются в простейших вариантах коррекции, когда ускорения, создаваемые ЛА, значительно меньше гравитационных.
Слагаемые (Vzωy-ωzVy)/g, (Vxωz-ωxVz)/g, (Vyωx-ωyVx)/g обусловлены появлением Кориолисовых сил и имеют значимость при разворотах ЛА.
Слагаемые  ,
,  ,
,  имеют значимость при появлении линейных ускорений по связанным осям ЛА.
имеют значимость при появлении линейных ускорений по связанным осям ЛА.
При относительно небольших углах атаки и скольжения скорость направлена в основном по строительной оси.
 ,
, 
Тогда (1) представляется в упрощенном виде

ny=cos(ϑ)cos(γ)+Vωz/g,
nz=-cos(ϑ)sin(γ)-ωyV/g.
Всякое отклонение модуля перегрузки от единицы и всякая неточность (1) учитывается снижением доверия к наблюдениям перегрузок путем увеличения дисперсий в ковариационной матрице Ri, в соответствии с заданным законом. При этом снижается интенсивность коррекции, и, следовательно, снижаются ее ошибки.
На режимах разгона и торможения значительный вклад в изменение кажущегося ускорения вносит производная скорости.
Учитывая то, что изменение скорости ЛА относится к длиннопериодическому движению, производная скорости выделяется из оценки скорости с помощью сглаживающего фильтра нижних частот

 .
.
Здесь T - постоянная времени фильтра нижних частот.
Из рассмотрения Якобиана Hi следует, что оценивание скорости ЛА происходит при выполнении разворотов, когда присутствуют одна или обе угловые скорости ωz, ωy. При этом слагаемые ωxV/g, -ωyV/g в соотношениях для ny, nz обеспечивают оценивание крена. Из первого уравнения в (1) следует, что слагаемое  в выражении для
в выражении для  влияет на оценивание тангажа.
влияет на оценивание тангажа.
На участках полета при взлете и посадке, когда скорость изменяется наиболее интенсивно, а ЛА не выполняет разворотов, скорость не оценивается, но при этом учитывают  для повышения точности оценивания тангажа.
для повышения точности оценивания тангажа.
С этой целью используют измерение скорости системой воздушных сигналов (СВС). СВС формирует измерение истинной воздушной скорости VTA.
Современные СВС обладают достаточно высокой точностью. Выделение производной  выполняют аналогично (2) с помощью фильтра нижних частот в дифференцирующем устройстве:
выполняют аналогично (2) с помощью фильтра нижних частот в дифференцирующем устройстве:

Заметим, что при этом постоянные рассогласования между земной и истинной воздушной скорости не вносят ошибок в определение производной. Динамические ошибки измерения VTA на малых высотах взлета и посадки незначительны. Шумовые погрешности СВС сглаживаются фильтром. Поэтому с достаточной точностью правомерно положить  .
.
Дополнительную оптимизацию коэффициентов фильтра выполняют с учетом уровня погрешностей датчиков. Путем анализа ошибок инерциальных датчиков с помощью спектральной плотности мощности и дисперсии Алана выделяют шумы квантования, случайное блуждание (дрейф), нестабильность смещения нуля (фликкер шум), случайное блуждание (дрейф) скорости, мультипликативную систематическую погрешность и синусоидальный шум.
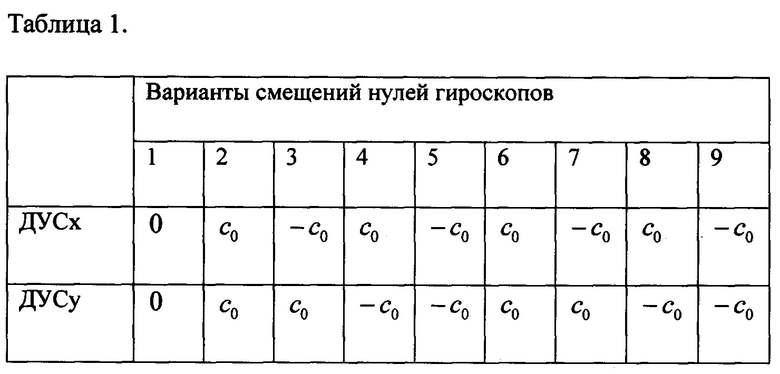
С учетом того, что основной вклад в ошибки ориентации бесплатформенной БРН вносят смещения нулей гироскопов, настройку коэффициентов фильтра Калмана выполняют на множестве обучающих последовательностей, формируемых для набора сочетаний знаков смещений.
Коэффициенты фильтра оптимизируют следующим образом.
Для каждого полета формируется девять обучающих последовательностей.
Варианты знаков смещений нулей гироскопов представлены в таблице 1, где c0 - абсолютная величина смещения. Величина c0 задается с учетом класса точности располагаемых гироскопов.

Всего в алгоритме БРН присутствует шесть коэффициентов, подлежащих настройке: q1, q2, q3 - диагональные элементы ковариационной матрицы возмущений Q, и a=d1,  ,
,  - коэффициенты нелинейной функции
- коэффициенты нелинейной функции  , определяющей диагональные элементы ковариационной матрицы ошибок наблюдения R.
, определяющей диагональные элементы ковариационной матрицы ошибок наблюдения R.
Критерием качества J1 назначают взвешенную среднеквадратическую ошибку ориентации по крену и тангажу, усредненную по времени и по множеству всех девяти обучающих последовательностей.

Здесь  - среднеквадратическая ошибка оценивания тангажа:
- среднеквадратическая ошибка оценивания тангажа:  - среднеквадратическая ошибка оценивания крена: αϑ=0.5 и αγ=0.5 - весовые коэффициенты; J={a, b, k, q1, q2, q3} - множество из шести искомых коэффициентов алгоритма.
- среднеквадратическая ошибка оценивания крена: αϑ=0.5 и αγ=0.5 - весовые коэффициенты; J={a, b, k, q1, q2, q3} - множество из шести искомых коэффициентов алгоритма.
Идентификацию турбулентности, в смысле выявления ее наличия, выполняют по величине среднеквадратичного отклонения  на скользящем интервале небольшой длины, порядка 1-2 секунд. При превышении некоторого заданного порога
на скользящем интервале небольшой длины, порядка 1-2 секунд. При превышении некоторого заданного порога  принимают решение о наличии турбулентности.
принимают решение о наличии турбулентности.
Оптимизации коэффициентов осуществляют в три этапа.
1. Численная минимизация критерия качества minJ1 и определение коэффициентов {a1, b1, k1, q11, q21, q31} для полетов в спокойной атмосфере,  .
.
2. Численная минимизация критерия качества minJ1 и определение коэффициентов {a2, b2, k2, q12, q22, q32} для полетов в условиях турбулентности,  .
.
3. Определение процедуры вычисления дисперсий d, q1, q2, q3, удовлетворяющей с достаточной точностью полетам как в спокойной атмосфере, так и в турбулентности.
Наиболее просто данная процедура реализуется с помощью линейной интерполяции коэффициентов фильтра по результатам этапов 1, 2 и текущим значениям  ,
,  .
.
Выходные сигналы крена, курса и тангажа, полученные от БРН, работающего в горячем резерве, сравнивают с аналогичными сигналами от МНК, работающего в альтернативном режиме, что позволяет дополнительно контролировать точность и достоверность полученных углов пространственной ориентации.
Малогабаритный навигационный комплекс может быть использован как на высокоманевренных, так и на маломаневренных ЛА. Сокращение времени начальной выставки достигается путем определения курса ЛА в процессе руления и разбега. Повышение надежности происходит за счет использования СВС в случае пропадания сигналов от СНС и использования резервной навигационной системы, а также проверкой достоверности сигналов от приемника СНС и проверки углов ориентации путем сравнения сигналов инерциальной системы с сигналами углов резервной системы. Повышение точности определения истинного курса обеспечивается путем списания девиации в полете и постоянной адаптивной коррекцией углов крена и тангажа по сигналам от акселерометров, а также оптимизацией коэффициентов фильтрации в зависимости от турбулентности, и осуществляя настройку на множестве обучающих последовательностей. Заметим, что списание девиации может быть осуществлено периодически, в случае отсутствия замены бортового и подвесного оборудования ЛА.
Предложенное техническое устройство может быть реализовано путем использования базовых элементов для вычислительных систем бортовых цифровых вычислительных машин и базовых элементов, используемых в существующих НК летательных аппаратов.
Литература
1. Патент №2550774. Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления, МПК G01C 21/08, бюл. №13, 2015 г. Авторы Заец В.Ф., Кулабухов В.С., Качанов Б.О., Туктарев Н.А., Гришин Д.В.
2. Патент №2585051. Способ контроля данных от спутниковых навигационных систем и устройство для его осуществления, МПК G01S 19/08. Бюл. №15, 2015 г. Авторы Заец В.Ф., Кулабухов В.С., Качанов Б.О., Туктарев Н.А.
3. Патент №2564380. Способ коррекции бесплатформенной инерциальной навигационной системы, МПК G01С 21/06. Бюл. №27, 2015 г. Авторы Заец В.Ф., Кулабухов В.С., Качанов Б.О., Туктарев Н.А., Гришин Д.В.
4. Патент №2564379. Бесплатформенная инерциальная курсовертикаль, МПК G01C 21/16, бюл. №27, 2015 г. Авторы Заец В.Ф., Кулабухов В.С., Качанов Б.О., Туктарев Н.А.
5. Патент №2579550. Способ определения погрешности измерения воздушной скорости и устройство для его осуществления, МПК G01P 21/00. Бюл. №10, 2016 г. Авторы Заец В.Ф., Корсун О.Н., Кулабухов В.С., Туктарев Н.А., Лысюк О.П.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| Самоорганизующийся навигационный комплекс | 2016 |
|
RU2640964C1 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Адаптивная бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2647205C2 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| МАЛОГАБАРИТНАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ, КОРРЕКТИРУЕМАЯ ОТ СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ | 2012 |
|
RU2502049C1 |
Изобретение относится к области навигации летательных аппаратов (ЛА) с использованием комплексного способа навигации, функционально объединяющего инерциальный способ навигации, спутниковый способ навигации и воздушно-скоростной способ навигации, а также к навигационным приборам для контроля и управления летательными аппаратами. Предлагаемый малогабаритный навигационный комплекс содержит приемник спутниковой навигационной системы (СНС), интегрированный блок датчиков, система воздушных сигналов (СВС), трехкомпонентный магнитометрический датчик (МД), концевой выключатель обжатия стойки шасси, блок определения достоверности сигналов СНС, вычислительный блок, блок определения коэффициентов девиации МД, блок определения курса ЛА, блок резервной навигации, блок адаптации к турбулентности. Технический результат, достигаемый от реализации заявленного изобретения, заключается в сокращении времени начальной выставки, повышении надежности и повышении точности определения истинного курса. 1 табл., 1 ил.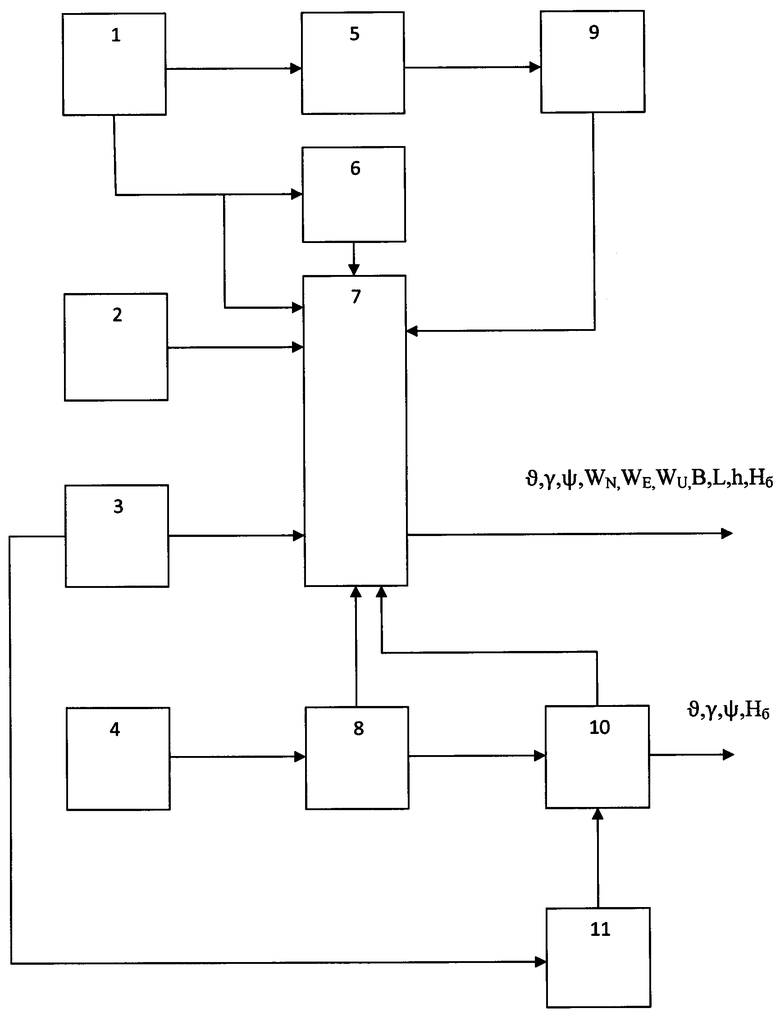
Малогабаритный навигационный комплекс (МНК), содержащий интегрированный блок датчиков (ИБД), систему воздушных сигналов (СВС), вычислительный блок и приемник спутниковой навигационной системы (ПСНС), отличающийся тем, что в него дополнительно введены трехкомпонентный магнитометрический датчик (ТМД), концевой выключатель обжатия стойки шасси, блок определения достоверности сигналов СНС, блок определения коэффициентов девиации (БОКД), блок определения курса (БОК) ЛА, блок резервной навигации (БРН), блок адаптации к турбулентности (БАТ), второй выход ПСНС, выход ИБД и первый выход СВС подключены к первым вторым и третьим входам вычислительного блока, второй выход ПСНС подключен к входу блока определения достоверности сигналов СНС, к четвертому входу вычислительного блока подключены последовательно соединенные ТМД и БОКД, к пятому входу вычислительного блока подключен первый выход БРН, к шестому входу вычислительного блока подключены последовательно соединенные БОК, концевой выключатель обжатия стойки шасси, вход которого соединен с первый выходом ПСНС, к седьмому входу подключен выход блока определения достоверности сигналов СНС, ко второму выходу СВС подключены последовательно соединенные БАТ и БРН, ко второму выходу БОКД подключен второй вход БРН, выходом МНК в основном и альтернативном режимах является выход вычислительного блока, в резервном режиме - второй выход БРН.
| Устройство для изготовления крупных стеновых блоков | 1958 |
|
SU118740A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| Способ приготовления водной суспензии инсектофунгисидов | 1948 |
|
SU74217A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| EP 1612514 A1, 04.01.2006. | |||

