Область техники
Изобретение относится к области малогабаритных бесплатформенных инерциальных систем навигации (БИНС) для различного класса носителей от авиационных до наземных.
Уровень техники
Использование малогабаритных БИНС с «грубыми» и средней точности чувствительными элементами (ЧЭ) описано в ряде патентов США корпорации American GNC, например, в ряде патентов о малогабаритных микромеханических инерциальных измерительных устройствах (патенты США №6671648, 6522992, 6516283) и о способах обработки измерений параметров движения носителя с их применением (патенты США №0697758, 6651027, 6494093, 6473713, 6427131). Основное внимание в этих патентах уделено предоставлению преимуществ по сравнению с обычными традиционными блоками ЧЭ на основании использования внешних датчиков навигационной информации (типа GPS), использовании демпфирования ошибок вычислительной платформы и т.д.
Основным недостатком данных БИНС является невозможность длительного функционирования в автономном режиме при отключении спутниковой навигационной системы (СНС), что принципиально важно, например, при постановке активных помех любого типа (так называемое «GPS jamming») для СНС. При наличии помех типа «jamming» БИНС становится полностью неработоспособной в интегрированном (совместном с СНС) режиме, так как пропадает внешняя навигационная информация, использовавшаяся для демпфирования ошибок вычислений. При этом ошибки определения координат достигают недопустимых величин порядка десятков километров.
Наиболее близким аналогом (прототипом) к предлагаемому устройству является малогабаритная БИНС ориентации на «грубых» ЧЭ (авторский патент РФ №2382988, МПК G01C 23/00, опубл. 27.02.2010). Данная система осуществляет демпфирование ошибок с использованием разности ускорений БИНС и системы воздушных сигналов (СВС).
Основным ограничением такой БИНС является тот факт, что она не производит счисления скоростей и координат, а определяет только углы ориентации. Демпфирование по разности ускорений, применяемое в прототипе, не может быть использовано для определения координат, поскольку приводит к недопустимо большим ошибкам в определении скоростей, а следовательно, и координат при интегрировании скоростей, тогда как для углов ориентации обеспечивается вполне разумная точность.
Раскрытие изобретения
Главная задача предлагаемого изобретения - существенное повышение точности счисления скоростей и координат движущегося объекта с малогабаритной БИНС средней точности в автономном режиме без использования постоянно обновляемых в реальном времени сигналов работающей СНС. Используя составляющие скорости ветра и воздушную скорость, возможно определить скорость объекта относительно Земли в отсутствие истинных сигналов от СНС (в первую очередь при наличии активных помех любого типа СНС - «jamming»).
Технический результат достигается тем, что в БИНС реализуют две вычислительных навигационных платформы, каждая из которых имеет свой закон управления (демпфирование инерциальных ошибок), зависящий от параметров движения носителя, а именно от составляющих горизонтальных ускорений носителя. Первая платформа является традиционной невозмущаемой вычислительной платформой, но с демпфированием по собственным ускорениям. Вторая осуществляет демпфирование ошибок по разности показаний скоростей ИНС и системы воздушных сигналов (СВС). При этом предварительно при наличии сигналов СНС определяют ошибку невыставки ИНС в азимуте, скорость и направление ветра. Первая платформа обеспечивает счисление углов тангажа и крена ориентации носителя, тогда как вторая - угла курса и счисление проекций скоростей носителя и его географических координат с учетом предварительно определенных и запомненных оценок скорости ветра и его направления.
Малогабаритная БИНС средней точности, корректируемая от системы воздушных сигналов, содержит блок чувствительных элементов (ЧЭ) средней точности, состоящий из трех акселерометров и трех датчиков угловой скорости по трем ортогональным осям, две вычислительных платформы, систему воздушных сигналов, блок определения ошибки курса и блок определения скорости ветра; связь с системой спутниковой навигации, при этом выходы сигналов линейных ускорений акселерометров и угловых скоростей блока ЧЭ, а также выход системы воздушных сигналов соответственно соединены с первыми, вторыми и третьими входами первой и второй вычислительных платформ, выход системы воздушных сигналов также соединен с первым входом блока определения скорости ветра; система спутниковой навигации связана с первым входом блока определения ошибки курса и со вторым входом блока определения скорости ветра, выход которого соединен с четвертым входом второй вычислительной платформы, выход которой по скорости носителя соединен со вторым входом блока определения ошибки курса, выход которого соединен с пятым входом второй вычислительной платформы, выходы которой являются выходами системы по углу курса, скорости и географическим координатам носителя, а выходы первой вычислительной платформы являются выходами системы по углам тангажа и крена носителя.
В составе первой вычислительной платформы свой блок пересчета ускорений из связанной в навигационную систему координат, свой блок вычисления линейных и угловых скоростей навигационной системы координат, свой блок формирования сигналов демпфирования, свои первый и второй блоки кватернионных вычислений, свой блок вычисления матрицы направляющих косинусов и углов ориентации; своя связь с системой воздушных сигналов; при этом выход сигналов линейных ускорений акселерометров блока ЧЭ соединен с первым входом блока пересчета ускорений, выход которого соединен со входом блока вычисления скоростей навигационной системы координат и первым входом блока формирования сигналов демпфирования; выход сигналов угловых скоростей блока ЧЭ соединен с первым входом первого кватернионного блока, выход которого соединен с первым входом второго кватернионного блока; второй и третий входы которого соединены соответственно с выходом блока вычислений скоростей навигационной системы координат и с выходом блока формирования сигналов демпфирования; выход второго кватернионного блока соединен со входом блока вычисления матрицы направляющих косинусов, а также в обратной связи со вторым входом первого кватернионного блока; первый выход обратной связи блока вычисления матрицы направляющих косинусов соединен со вторым входом блока пересчета ускорений; выход системы воздушных сигналов соединен со вторым входом блока формирования сигналов демпфирования; второй и третий выходы блока вычисления матрицы направляющих косинусов являются выходами первой вычислительной платформы и всей системы по углам тангажа и крена носителя.
В составе второй вычислительной платформы свой блок пересчета ускорений из связанной в навигационную систему координат, свой блок вычисления линейных и угловых скоростей и географических координат, свой блок формирования сигналов демпфирования, свои первый и второй блоки кватернионных вычислений, свой блок вычисления матрицы направляющих косинусов и углов ориентации; свои связи с системой воздушных сигналов, с блоком определения скорости ветра и с блоком определения ошибки курса; при этом выход сигналов линейных ускорений акселерометров блока ЧЭ соединен с первым входом блока пересчета ускорений, выход которого соединен с первым входом блока вычисления скоростей и координат; выход сигналов угловых скоростей блока ЧЭ соединен с первым входом первого кватернионного блока, выход которого соединен с первым входом второго кватернионного блока, второй, третий и четвертый входы которого соединены соответственно с первым выходом блока вычислений скоростей и координат; с первым выходом блока формирования сигналов демпфирования и с выходом блока определения ошибки курса; выход второго кватернионного блока соединен со входом блока вычисления матрицы направляющих косинусов, а также в обратной связи со вторым входом первого кватернионного блока; выход обратной связи блока вычисления матрицы направляющих косинусов соединен со вторым входом блока пересчета ускорений; выход системы воздушных сигналов связан с первым входом блока формирования сигналов демпфирования; выход блока вычисления матрицы направляющих косинусов по углу курса носителя связан со входом блока определения скорости ветра и со вторым входом блока формирования сигналов демпфирования; сигнал проекций воздушной скорости по показаниям СВС подан со второго выхода блока формирования сигналов демпфирования на первый вход первого сумматора, второй вход которого соединен с выходом запомненных оценок проекций скорости ветра блока определения скорости ветра, а выход первого сумматора соединен с первым входом второго сумматора, на второй вход которого со знаком минус подан сигнал проекций скорости носителя со второго выхода блока вычисления скоростей и координат; а выход второго сумматора соединен с третьим входом блока формирования сигналов демпфирования и со вторым входом блока вычисления скоростей и координат, второй и третий выходы блока вычисления скоростей и координат соответственно по проекциям скорости носителя и по географическим координатам носителя, а также выход блока вычисления матрицы направляющих косинусов по углу курса носителя являются выходами второй вычислительной платформы и всей системы.
Перечень чертежей
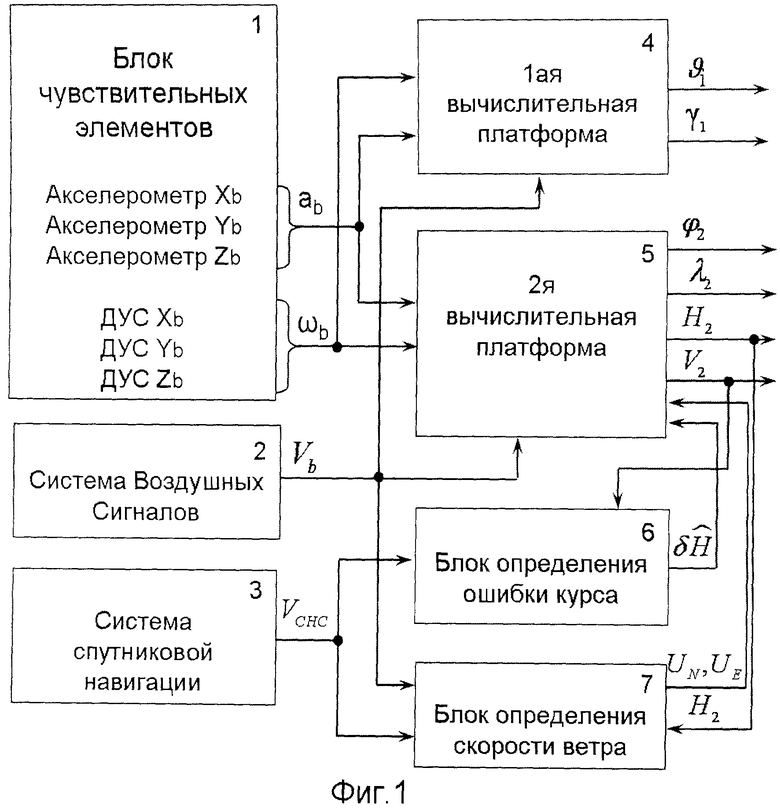
Фиг.1 - блок-схема уровней иерархии устройства предполагаемой системы.
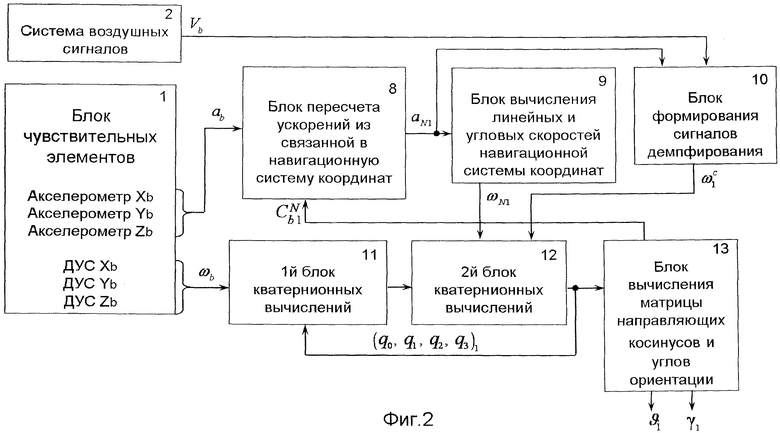
Фиг.2 - блок-схема устройства первой вычислительной платформы.
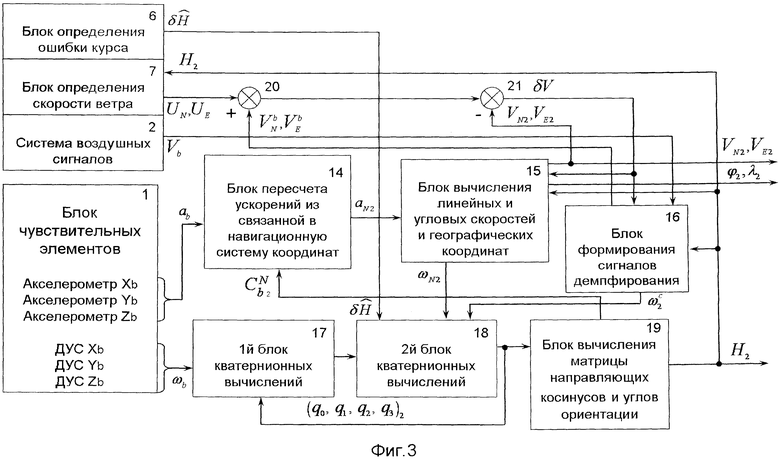
Фиг.3 - блок-схема устройства второй вычислительной схемы устройства.
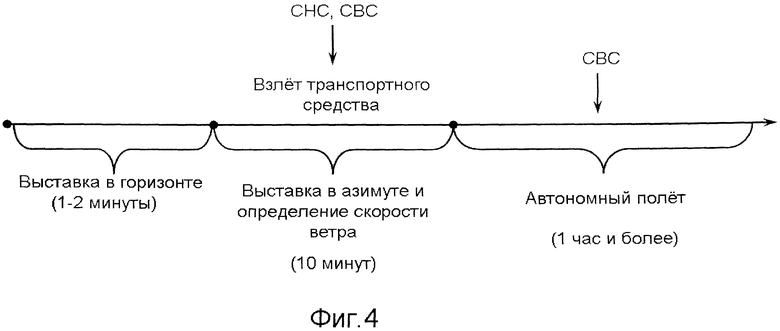
Фиг.4 - этапная временная диаграмма работы системы.
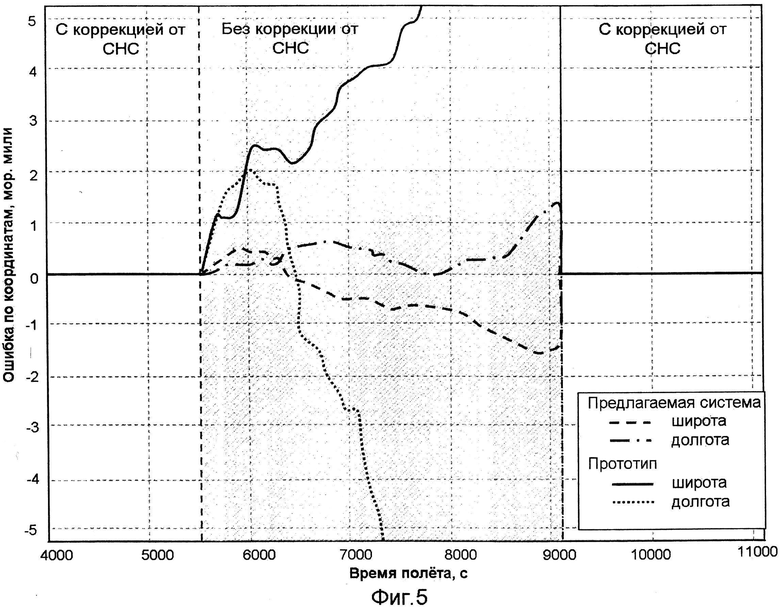
Фиг.5 - сравнение временных графиков ошибок определения координат предлагаемым устройством и прототипом.
Осуществление изобретения
На Фиг.1…3 блоки системы имеют следующую сквозную нумерацию: 1 - блок чувствительных элементов, состоящий из трех акселерометров и трех датчиков угловой скорости, расположенных по трем ортогональным осям, 2 - система воздушных сигналов, 3 - система спутниковой навигации, 4 - 1-я вычислительная платформа, 5 - 2-я вычислительная платформа, 6 - блок определения ошибки курса, 7 - блок определения скорости ветра; в первой вычислительной платформе 4: 8 - блок пересчета ускорений из связанной в навигационную систему координат, 9 - блок вычисления линейных и угловых скоростей навигационной системы координат, 10 - блок формирования сигналов демпфирования, 11 - первый блок кватернионных вычислений, 12 - второй блок кватернионных вычислений, 13 - блок вычисления матрицы направляющих косинусов и углов ориентации, во второй вычислительной платформе 5: 14 - блок пересчета ускорений из связанной в навигационную систему координат, 15 - блок вычисления линейных и угловых скоростей и географических координат, 16 - блок формирования сигналов демпфирования, 17 - первый блок кватернионных вычислений, 18 - второй блок кватернионных вычислений, 19 - блок вычисления матрицы направляющих косинусов и углов ориентации, 20 - первый сумматор, 21 - второй сумматор.
На чертежах приняты следующие обозначения сигналов устройства:
из блока 1: a b - вектор сигналов кажущегося ускорения с акселерометров и ωb - вектор сигналов абсолютной угловой скорости ДУС в связанной системе координат;
из блока 2: VCHC - воздушная скорость (проекции (составляющие) скорости 
из блока 3: VCHC - путевая скорость, измеренная СНС (проекции скорости (VN, VE));
из блока 6: 
из блока 7: 

Проекции любых скоростей с индексами N, Е - это проекции на оси навигационной системы координат.
На блок-схемах вычислительных платформ (индекс i=1, 2 соответствует номеру платформы): a
Ni - ускорение и ωNi - угловая скорость носителя в навигационной системе координат, 

V2 - путевая скорость носителя на выходе системы (VN2,VE2 - проекции скорости),
φ2, λ2 - географические координаты (широта и долгота), полученные системой.
ϑi, γi, Hi - углы ориентации соответственно тангажа, крена и курса носителя,
Информационный и сигнальный обмен между входами-выходами блоков осуществляют по линиям связи, показанным на блок-схемах сплошными тонкими линиями. Линии связи представляют собой известные линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др. В качестве каналов передачи данных могут использоваться различные цифровые и аналоговые каналы, например, каналы информационного обмена, выполненные в соответствии с ГОСТ 18977-79 (Комплексы бортового оборудования самолетов и вертолетов. Типы функциональных связей. Виды и уровни электронных сигналов).
Устройство системы
Для повышения точности и эффективности автономного определения текущих навигационных параметров (включая скорости и координаты), в отсутствие постоянно обновляемой в реальном времени информации от СНС, устройство собрано, запрограммировано, отлажено и работает следующим образом.
По измерениям, поступающим от единственного блока ЧЭ средней точности, каждая вычислительная платформа формирует собственное навигационное решение. При этом первая платформа используется только для определения углов тангажа и крена, тогда как вторая обеспечивает вычисление угла курса, путевой скорости (и ее проекций) носителя и географических координат носителя.
На Фиг.2 представлена функциональная схема первой вычислительной платформы. Это базовая платформа, которая работает в своих базовых блоках пересчета ускорений, вычисления скоростей, первом и втором кватернионном блоках, блоке вычисления матрицы направляющих косинусов и углов ориентации. По величинам угловых скоростей ωb, измеренных ДУС блока 1, рассчитывают элементы кватерниона конечного поворота от связанной системы координат к инерциальной (блок 11), а затем от инерциальной системы координат к навигационной (блок 12). По элементам второго кватерниона (блок 12) конечного поворота (q0, q1, q2, q3)1 в блоке 13 вычисляют элементы матрицы направляющих косинусов перехода от связанной системы координат к навигационной и углы ориентации (тангаж, крен) вычисляют в блоке 13 по элементам матрицы направляющих косинусов. Также элементы второго кватерниона используют в первом блоке кватернионных вычислений 11 на следующем шаге дискретных вычислений.
В блоке 8 при помощи матрицы направляющих косинусов из блока 13 осуществляют пересчет ускорений a
b, измеренных акселерометрами блока 1, в навигационную систему координат 
Аналогично первой вычислительной платформе работает и вторая, но у нее есть существенное отличие в формировании сигналов демпфирования. Однако, хотя реализация демпфирования в блоках 10 и 16 разная, в обеих платформах их сформированные сигналы демпфирования 
В первой платформе для реализации сигналов демпфирования в блоке 10 по сигналам из блока 2 СВС и блока 8 осуществляют расчет ускорений воздушной скорости, после чего они сглаживаются низкочастотным фильтром первого порядка типа 
где 


K, Kb - параметры (коэффициенты) демпфирования.
Реализуемое таким образом демпфирование гарантирует достаточно точное вычисление углов тангажа и крена, но оно не подходит для достаточно точного определения скоростей и географических координат (примечание: для расчета географических координат рассчитывается матрица перехода от связанной с землей системы координат к навигационной и по ее элементам рассчитываются географические координаты).
Для достаточно точного определения составляющих скорости носителя и его географических координат (в отсутствие сигналов от СНС) используют другой закон демпфирования, реализованный во второй платформе. На Фиг.З приведена функциональная схема второй платформы. Здесь связи и блоки во многом совпадают с первой вычислительной платформой, за исключением реализации блока формирования сигналов демпфирования (блок 16) и коррекции текущего угла курса (по сигналу блока 6 определения ошибки курса) во втором блоке кватернионных вычислений (блок 18).
Для возможности счисления скоростей и координат в интегрированном (совместном) с СВС режиме необходимо использовать демпфирование по разности инерциальной скорости относительно Земли и скорости, рассчитанной по показаниям СВС, но для этого необходимо знать (по минимуму) постоянно запомненные значения (оценки) скорости и направления ветра, что и предлагается осуществить в данном изобретении.
При этом низкочастотное (плавное) изменение скорости ветра не скажется на точности системы на интервале времени порядка 40…60 минут, поскольку оно будет мало отличаться от постоянного запомненного значения. Тогда как относительно резкое (высокочастотное) изменение скорости ветра будет парироваться демпфирующей схемой путем уменьшения коэффициентов демпфирования, обеспечивающего ослабление демпфирования. Фактически демпфирование в этом случае будет играть роль фильтра низких частот. Такой подход возможен только в том случае, когда ЧЭ имеют точности, как минимум, на уровне систем средней точности, и не может быть использован для низкоточных систем с «грубыми» ЧЭ (как, например, в прототипе). Заметим, что к системам средней точности относятся ЧЭ с параметрами дрейфа гироскопа 0,5…2,0 град/с и смещений нуля акселерометра 10-4 g…5·10-4 g.
Во второй платформе для демпфирования используют разность проекций скорости V2 инерциальной навигационной системы (ИНС) носителя относительно Земли (блок 15), проекций воздушной скорости, рассчитанной (в блоке 16) по показаниям СВС, и запомненных оценок составляющих скорости ветра (блок 7), рассчитанных с использованием СНС к началу режима автономного (с отсутствием сигналов СНС) счисления второй платформы:
δVN=VN2-VbcosH2-UN;
δVE=VE2-VbsinH2-UE.
Здесь угол курса H2 - берется из блока 19.
Эту разность скоростей, реализуемую сумматорами 20, 21, подают на вход первого интегратора в блоке вычисления линейных и угловых скоростей (блок 15); а также подают в блок формирования сигналов демпфирования 16 для формирования демпфирующего сигнала 

В блоке 16 также рассчитывают с использованием сигнала курса H2 из блока 19 проекции воздушной скорости Vb от СВС на оси навигационной системы координат, поступающие затем на вход первого сумматора 20:
Для того чтобы рассчитать скорость объекта относительно Земли по измеряемой воздушной скорости, необходимо определить оценки проекции скорости ветра на навигационную систему координат (блок 7), а также определить ошибку в счислении курса (блок 6).
Для получения оценок проекций (составляющих) скорости ветра UN, UE в блоке 7 используют следующие уравнения:
UN=VN-VbcosH;
UE=VE-VbsinH,
где Vснс=(VN, VE) - проекции скорости относительно Земли, полученной от СНС,
H - угол курса, который вычисляется и запоминается в блоке 19 после определения ошибки угла курса и его коррекции.
Для определения ошибки курса 
Из всей совокупности уравнений следует, что используя составляющие скорости ветра и воздушную скорость, возможно определить скорость объекта относительно Земли в отсутствие истинных сигналов от СНС (в первую очередь при наличии активных помех любого типа для СНС-jamming).
Этапная временная диаграмма работы всей системы представлена на Фиг.4.
Перед взлетом, пока летательный аппарат неподвижен, осуществляют выставку системы в горизонт (определяют начальные углы крена и тангажа). После взлета летательного аппарата осуществляют сначала грубую, затем точную выставку в азимуте (определяют ошибку курса в блоке 6) по сигналам СНС и параллельно определяют в блоке 7 скорость ветра с использованием СНС и СВС. После чего СНС может быть отключена и система может перейти в автономный режим, используя только СВС.
Важно отметить, что в случае наличия удовлетворительного сигнала СНС система всегда находится в интегрированном режиме с СНС, и только при наличии отказа СНС (при наличии помех (jamming)) система переходит в предлагаемый режим автономного счисления с СВС. При этом блоки 6 и 7 обновляют свои сигналы только в интегрированном режиме с СНС, а при переходе в автономный режим происходит запоминание последних обновленных значений в блоках 6 и 7, которые затем используют в расчетах автономного режима.
Данное техническое устройство реализовано компанией ООО «ТеКнол» (Россия) в серийном изделии «КомпаНав-5» и прошло полную серию летных испытаний на различных типах летательных аппаратов. На Фиг.5 представлены ошибки ИНС в автономном режиме при отсутствии сигналов от СНС в традиционной и предлагаемой системах. Традиционная система с датчиками (ЧЭ) той же средней точности позволит определить текущие географические координаты на уровне 50…60 морских миль, что в 40…50 раз хуже, чем в предлагаемой системе «КомпаНав-5».
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2382988C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
Изобретение относится к области приборостроения и может найти применение в инерциальных навигационных системах (ИНС) авиационных и наземных носителей. Задача - существенное повышение точности счисления скоростей и координат движущегося объекта с малогабаритной бесплатформенной ИНС (БИНС) средней точности в автономном режиме без использования постоянно обновляемых в реальном времени сигналов работающей спутниковой навигационной системы (СНС). Технический результат достигается тем, что в БИНС средней точности реализуют две вычислительных навигационных платформы, каждая из которых имеет свой закон управления (демпфирование инерциальных ошибок), зависящий от параметров движения носителя, а именно от составляющих горизонтальных ускорений носителя. При этом первая платформа обеспечивает счисление углов тангажа и крена ориентации носителя, тогда как вторая - угла курса и счисление проекций скоростей носителя и его географических координат с учетом предварительно определенных и запомненных оценок скорости ветра и его направления. Каждая из платформ имеет свой закон управления. Одна из них является традиционной невозмущаемой вычислительной платформой, но с демпфированием по собственным ускорениям. Вторая осуществляет демпфирование ошибок по разности показаний скоростей ИНС и системы воздушных сигналов (СВС). При этом предварительно при наличии сигналов СНС определяют ошибку невыставки ИНС в азимуте, скорость и направление ветра. 5 ил.
Малогабаритная бесплатформенная инерциальная навигационная система средней точности, корректируемая от системы воздушных сигналов, содержащая блок чувствительных элементов (ЧЭ) средней точности, состоящий из трех акселерометров и трех датчиков угловой скорости по трем ортогональным осям, две вычислительных платформы, систему воздушных сигналов, блок определения ошибки курса и блок определения скорости ветра; связь с системой спутниковой навигации, при этом выходы сигналов линейных ускорений акселерометров и угловых скоростей блока ЧЭ, а также выход системы воздушных сигналов соответственно соединены с первыми, вторыми и третьими входами первой и второй вычислительных платформ, выход системы воздушных сигналов также соединен с первым входом блока определения скорости ветра; система спутниковой навигации связана с первым входом блока определения ошибки курса и со вторым входом блока определения скорости ветра, выход которого соединен с четвертым входом второй вычислительной платформы, выход которой по скорости носителя соединен со вторым входом блока определения ошибки курса, выход которого соединен с пятым входом второй вычислительной платформы, выходы которой являются выходами системы по углу курса, скорости носителя и его географическим координатам, а выходы первой платформы являются выходами системы по углам тангажа и крена носителя; в составе первой вычислительной платформы свой блок пересчета ускорений из связанной в навигационную систему координат, свой блок вычисления линейных и угловых скоростей навигационной системы координат, свой блок формирования сигналов демпфирования, свои первый и второй блоки кватернионных вычислений, свой блок вычисления матрицы направляющих косинусов и углов ориентации; своя связь с системой воздушных сигналов; при этом выход сигналов линейных ускорений акселерометров блока ЧЭ соединен с первым входом блока пересчета ускорений, выход которого соединен со входом блока вычисления скоростей навигационной системы координат и первым входом блока формирования сигналов демпфирования; выход сигналов угловых скоростей блока ЧЭ соединен с первым входом первого кватернионного блока, выход которого соединен с первым входом второго кватернионного блока; второй и третий входы которого соединены соответственно с выходом блока вычислений скоростей навигационной системы координат и с выходом блока формирования сигналов демпфирования; выход второго кватернионного блока соединен со входом блока вычисления матрицы направляющих косинусов, а также в обратной связи со вторым входом первого кватернионного блока; первый выход обратной связи блока вычисления матрицы направляющих косинусов соединен со вторым входом блока пересчета ускорений; выход системы воздушных сигналов соединен со вторым входом блока формирования сигналов демпфирования; второй и третий выходы блока вычисления матрицы направляющих косинусов являются выходами первой вычислительной платформы и всей системы по углам тангажа и крена носителя; в составе второй вычислительной платформы свой блок пересчета ускорений из связанной в навигационную систему координат, свой блок вычисления линейных и угловых скоростей и географических координат, свой блок формирования сигналов демпфирования, свои первый и второй блоки кватернионных вычислений, свой блок вычисления матрицы направляющих косинусов и углов ориентации; свои связи с системой воздушных сигналов, с блоком определения скорости ветра и с блоком определения ошибки курса; при этом выход сигналов линейных ускорений акселерометров блока ЧЭ соединен с первым входом блока пересчета ускорений, выход которого соединен с первым входом блока вычисления скоростей и координат; выход сигналов угловых скоростей блока ЧЭ соединен с первым входом первого кватернионного блока, выход которого соединен с первым входом второго кватернионного блока, второй, третий и четвертый входы которого соединены соответственно с первым выходом блока вычислений скоростей и координат; с первым выходом блока формирования сигналов демпфирования и с выходом блока определения ошибки курса; выход второго кватернионного блока соединен со входом блока вычисления матрицы направляющих косинусов, а также в обратной связи со вторым входом первого кватернионного блока; выход обратной связи блока вычисления матрицы направляющих косинусов соединен со вторым входом блока пересчета ускорений; выход системы воздушных сигналов связан с первым входом блока формирования сигналов демпфирования; выход блока вычисления матрицы направляющих косинусов по углу курса носителя связан со входом блока определения скорости ветра и со вторым входом блока формирования сигналов демпфирования; сигнал проекций воздушной скорости по показаниям СВС подан со второго выхода блока формирования сигналов демпфирования на первый вход первого сумматора, второй вход которого соединен с выходом запомненных оценок проекций скорости ветра блока определения скорости ветра, а выход первого сумматора соединен с первым входом второго сумматора, на второй вход которого со знаком минус подан сигнал проекций скорости носителя со второго выхода блока вычисления скоростей и координат; а выход второго сумматора соединен с третьим входом блока формирования сигналов демпфирования и со вторым входом блока вычисления скоростей и координат, второй и третий выходы блока вычисления скоростей и координат соответственно по проекциям скорости носителя и по географическим координатам носителя, а также выход блока вычисления матрицы направляющих косинусов по углу курса носителя являются выходами второй вычислительной платформы и всей системы.
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2382988C1 |
| US 6408245 B1, 18.06.2002 | |||
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| US 3883812 A, 13.05.1975 | |||
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |

