Изобретение относится к измерительной технике и может быть использовано для морских, воздушных и наземных объектов. Задачей изобретения является повышение точности бесплатформенной инерциальной навигационной системы (БИНС) и уменьшение требуемых вычислительных затрат, путем создания способа непрерывной коррекции углов ориентации от спутниковой навигационной системы (СНС) с использованием системы воздушных сигналов (СВС).
Предлагается способ совместного оценивания крена, тангажа и рыскания ЛА по измерениям трехкомпонентных датчиков ДУС, ДЛУ и одного приемника СНС по алгоритму Калмановской фильтрации третьего порядка. При маршрутных полетах по прямой линии, в канале оценивания курса может возникать погрешность из-за ухудшения наблюдаемости. По этой причине при отсутствии производной по углу рыскания для уточнения курса предлагается использовать путевую скорость от СНС и истинную воздушную скорость от СВС ЛА. Данный алгоритм удобен для практического применения, так как может быть реализован при относительно небольших вычислительных затратах.
В распространенном способе комплексирования при помощи статистического фильтра оцениваются погрешности навигационных параметров и инструментальных погрешностей инерциальных датчиков. По результатам оценивания по уравнениям динамики косвенным образом оценивают ошибки текущих измерений углов пространственной ориентации ЛА и корректируют текущие углы ориентации. Для обеспечения заданной точности при этом необходимо оценивать свыше двадцати параметров, что требует больших вычислительных мощностей. Определение углов пространственной ориентации спутниковыми навигационными системами путем измерения фазового сдвига между принятыми сигналами от каждого космического аппарата требует установки на ЛА нескольких антенн и линий приема и обработки сигналов, что на малогабаритных ЛА не всегда возможно.
Известен способ угловой ориентации объекта по сигналам спутниковых радионавигационных систем. Патент №2379700, Российская Федерация. Способ угловой ориентации объекта по сигналам спутниковых радионавигационных систем. МПК G01S 5/02. Опубликовано 20.01.2010, бюлл. №2.
Патент основан на приеме сигналов от космических аппаратов глобальных навигационных спутниковых систем на разнесенные две или более антенны, измерении фазового сдвига между принятыми сигналами от каждого космического аппарата, проведении в течение интервала времени m измерений фазовых сдвигов между парами антенно-приемных устройств, в котором осуществляют подбор значений целочисленных неоднозначностей измерений фазовых сдвигов для минимального созвездия из n космических аппаратов, позволяющих определить возможные значения угловой ориентации.
Недостатком этого изобретения является то, что для его реализации кроме того, что необходимо иметь несколько антенн и линий приема и обработки сигналов, требуется предварительная коррекция измеренных фазовых сдвигов на величину аппаратурной составляющей систематической погрешности, вызванной неодинаковыми значениями группового времени запаздывания (ГВЗ) сигналов в антенно-приемных устройствах (далее антенно-приемные каналы), являющихся составной частью устройства определения угловой ориентации, размещаемого на объекте. При неодинаковых значениях ГВЗ в антенно-приемных каналах, разность значений ГВЗ в них будет отличаться от нуля. Если в расчетах принять указанную разность значений ГВЗ равной нулю, то это приведет к снижению точности оценки угловой ориентации объекта. Кроме того на малоразмерных ЛА размещение нескольких приемных антенн проблематично.
Существует патент на изобретение №2646954, Способ коррекции бесплатформенной инерциальной навигационной системы. МПК G01C 21/06. Опубликовано 12.03.2018, бюлл. №8, принятый нами за прототип.
Способ включает в себя комплексирование сигналов, соответствующих угловой скорости и земной скорости объекта, с сигналами, соответствующими линейным ускорениям, и преобразованными с учетом параметров полета объекта, и адаптивную оценку крена и тангажа посредством фильтра Калмана, в котором коэффициент усиления изменяется в зависимости от текущих значений модулей перегрузки, линейной скорости, а также угловых скоростей. Используют сигнал, соответствующий истинной воздушной скорости объекта, полученный от системы воздушных сигналов (СВС) в виде функции от динамического давления, и сигнал, соответствующий продольному ускорению, полученный путем дифференцирования с последующим сглаживанием сигнала скорости от СВС.
Недостатком известного способа является то, что в приведенном изобретении не предусмотрено измерение курса. Кроме того в условиях непрерывного маневрирования ЛА этот способ обладает недостаточной точностью. Это может привести к возникновению значительных погрешностей в результате постоянного маневрирования высокоманевренных ЛА.
Цель работы - повышение точности коррекции БИНС по углам крена, тангажа и обеспечение коррекции курса по сигналам одноантенного приемника СНС во всем диапазоне полета, при уменьшении вычислительных затрат БЦВМ.
Поставленная цель достигается за счет того, что согласно способу коррекции углов ориентации бесплатформенной инерциальной навигационной системы (БИНС), при котором, по сигналам, поступающим от датчиков угловых скоростей (ДУС) и от датчиков линейных ускорений (ДЛУ), определяют углы крена и тангажа летательного аппарата (ЛА), совместно обрабатывают сигналы, соответствующие линейным ускорениям, с сигналами, соответствующими линейным ускорениям, полученными путем преобразования параметров полета ЛА, используя при этом сигналы воздушной скорости, оценивают углы крена и тангажа посредством фильтра Калмана и осуществляют коррекцию углов крена и тангажа БИНС, отличающийся тем, что при основном режиме коррекции осуществляют оценку углов крена, курса и тангажа ЛА, используют сигналы, соответствующие линейным скоростям, полученные от приемника спутниковой навигационной системы (СНС) и их проекции в связанную систему координат, используют сигналы, соответствующие линейным ускорениям ЛА, которые получают путем сглаживания и дифференцирования сигналов скоростей от приемника СНС, с последующим проецированием их в связанную систему координат, определяют момент ухудшения наблюдаемости по каналу курса по условиям отсутствия маневра ЛА и превышения порога ошибки курса, при этом в случае ухудшении наблюдаемости переходят на резервный режим коррекции курса, при этом используют путевую скорость и воздушную скорость от системы воздушных сигналов, определяют путевой угол ЛА, определяют скорость и угол ветра, определяют угол сноса летательного аппарата и определяют курс путем вычитания из путевого угла угла сноса ЛА.
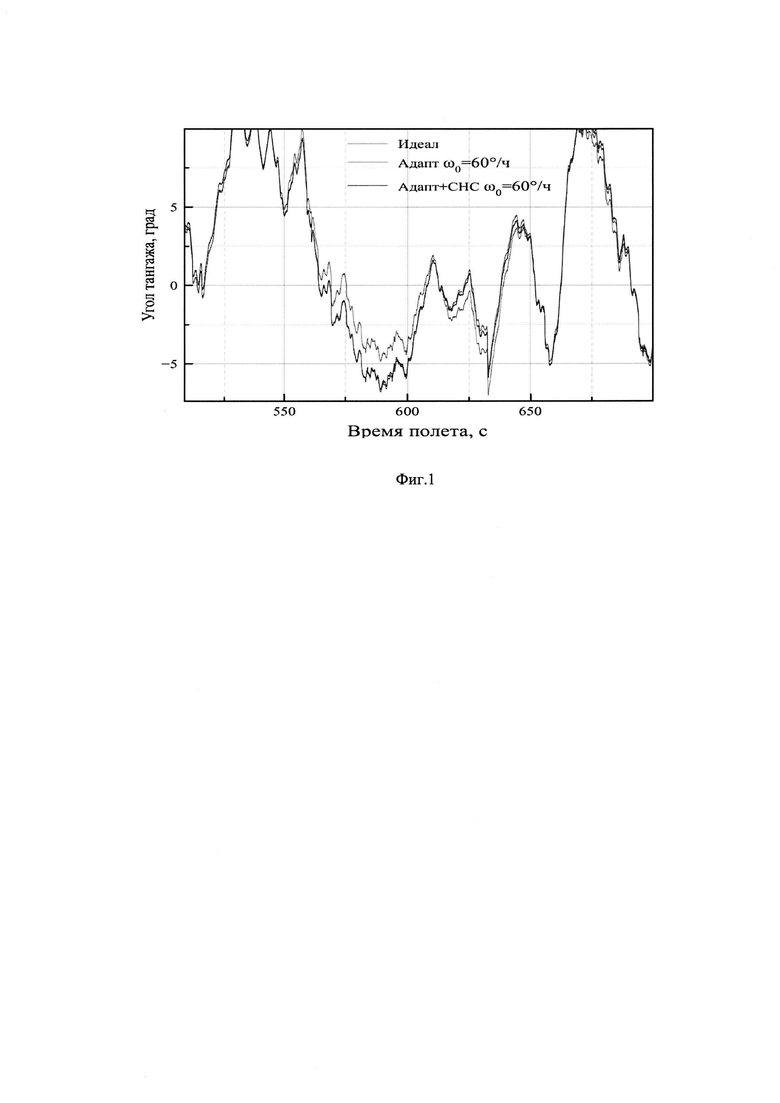
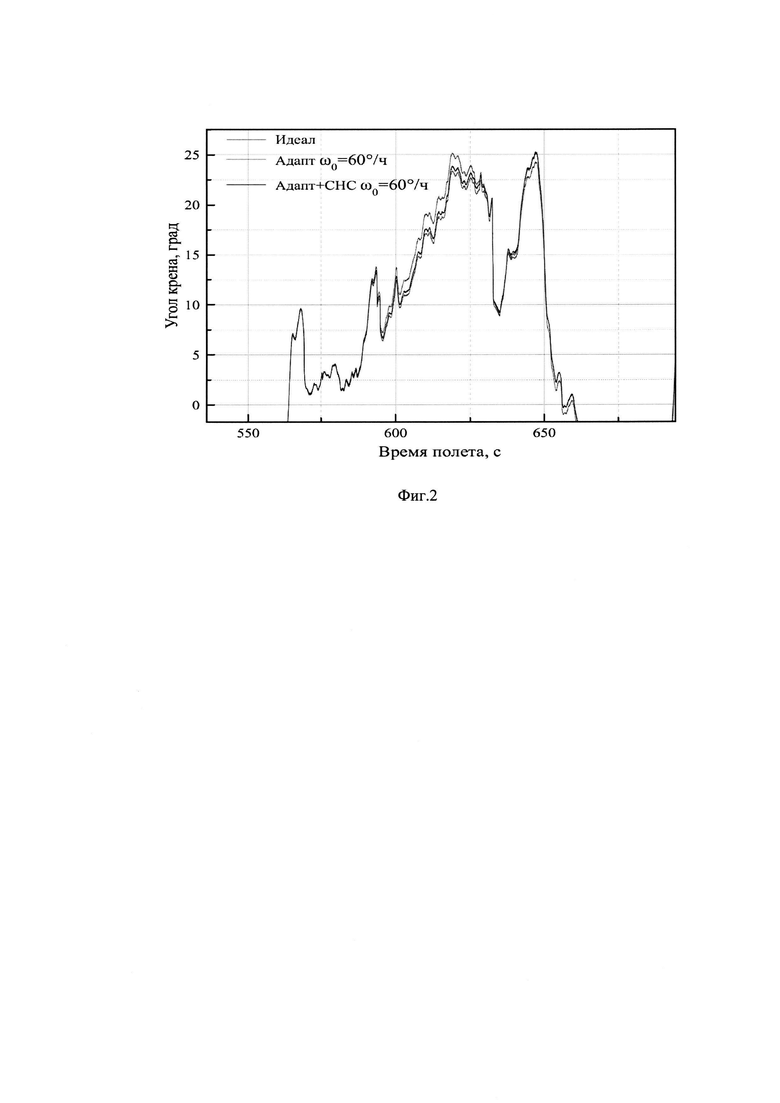
На фиг. 1, фиг. 2 и фиг. 3 представлены сравнительные результаты моделирования идеальных значений тангажа, крена и курса (красная линия), с результатами резервного режима (зеленая линия) и основного режима (синяя линия) коррекции БИНС. На фиг. 4 представлена схема, поясняющая последовательность получения выражений для определения угла сноса.
Суть работы способа излагается ниже.
Изменение крена, тангажа и курса описывают с помощью кватерниона ориентации, для которого начальное значение курса равно начальному значению выставленного курса ЛА

Расчет кватерниона (1), необходимый для определения его начального значения и уточнения на каждом шаге коррекции, выполняют с помощью известных соотношений. По


Расчет крена и тангажа по матрице поворота выполняется с помощью соотношений (3): крен:
γ=-Arcsin(a(3,2)/a(2,2)) в диапазоне ±180 градусов,
тангаж:

курс:
ψ=-Arctg(a(1,3)/a(1,1)) в диапазоне 0-360 ррадусов.
При счислении ориентации используется кватернион угловых скоростей.

где ωx, ωy, ωz - измерения, поступающие с блока датчиков угловых скоростей [rad/c].
Определение текущего кватерниона ориентации выполняется с помощью одношагового алгоритма, имеющего вид

где Δt - шаг дискретизации измерений по времени, «°» - операция произведения кватернионов.
Вектор состояния адаптивного фильтра Калмана представлен в выражении (6):

Здесь ϑ - тангаж, γ - крен, φ - курс, i - номер дискретного момента времени измерений датчиков.
Вектор измерений, обозначаемый далее Z, содержит измерения акселерометров. Вектор измерений, обозначаемый далее  содержит параметры полета ЛА, определяемые по сигналам приемника СНС и содержащие текущие параметры полета ЛА:
содержит параметры полета ЛА, определяемые по сигналам приемника СНС и содержащие текущие параметры полета ЛА:

Здесь νi - вектор ошибок измерений с заданной ковариационной матрицей R.
Функции ƒx, ƒy, ƒz определяют связь измерений перегрузок с параметрами полета ЛА. Точные соотношения для этих функций имеют вид

Здесь Vx, Vy, Vz - проекции вектора земной скорости на связанные оси ЛА, которые определяют через матрицу направляющих косинусов A(3,3) согласно выражению (3):

где VN, VU, VE - проекции вектора земной скорости, полученные от приемников СНС; g - ускорение силы тяжести.
Величины  проекций ускорений на оси связанной системы координат определяют как проекции ускорений преемника СНС через матрицу направляющих косинусов A(3,3). Для нахождения проекций ускорений необходимо решить систему дифференциальных уравнений. Учитывая то, что изменение скорости ЛА относится к длиннопериодическому движению, производная скорости выделяется из оценки скорости с помощью сглаживающего фильтра нижних частот по трем осям xyz:
проекций ускорений на оси связанной системы координат определяют как проекции ускорений преемника СНС через матрицу направляющих косинусов A(3,3). Для нахождения проекций ускорений необходимо решить систему дифференциальных уравнений. Учитывая то, что изменение скорости ЛА относится к длиннопериодическому движению, производная скорости выделяется из оценки скорости с помощью сглаживающего фильтра нижних частот по трем осям xyz:

Здесь T - постоянная времени фильтра.
С учетом (8) и (10) матрица Якоби вектора измерений (7) имеет вид

Возможные большие рассогласования измерений  в режимах маневрирования учитываются с помощью включения в модель динамики вектора состояния (6) дополнительных возмущений, уровень которых определяется мерой отличия модуля перегрузки от единицы и модуля угловой скорости от нуля.
в режимах маневрирования учитываются с помощью включения в модель динамики вектора состояния (6) дополнительных возмущений, уровень которых определяется мерой отличия модуля перегрузки от единицы и модуля угловой скорости от нуля.
Текущий вектор состояния (6) рассчитывается по кватерниону (1) после чего полагается, что он известен с точностью до указанных дополнительных возмущений. При этом уравнения объекта принимаются в виде:

Здесь xiq - вектор, в котором компоненты крена, тангажа и курса рассчитаны по соотношениям (3), wi - вектор возмущений с переменной ковариационной матрицей Qi:

В соответствии с (11) матрица дискретной модели объекта, используемая в алгоритме фильтра Калмана для прогноза ковариационной матрицы ошибок оценивания, принимается единичной.
Адаптивный алгоритм фильтра Калмана имеет следующий вид:

Возникающие отличия ускорений, создаваемых ЛА при маневрах, от ускорений, получаемых путем дифференцирования скоростей от приемников СНС при маневрах, учитывают с помощью включения в них вектора ошибок измерений νi дополнительных возмущений. При этом дисперсии  в ковариационной матрице Ri ставятся в соответствие со степенью выдерживания постоянной ориентации на шаге дискретизации измерений Δt, а также с уровнем влияния ускорений, создаваемых летательным аппаратом. Малое влияние этих факторов выражается условием выдерживания постоянной ориентации на шаге интегрирования
в ковариационной матрице Ri ставятся в соответствие со степенью выдерживания постоянной ориентации на шаге дискретизации измерений Δt, а также с уровнем влияния ускорений, создаваемых летательным аппаратом. Малое влияние этих факторов выражается условием выдерживания постоянной ориентации на шаге интегрирования

Данное условие выдерживается относительно просто при задании достаточно большой частоты регистрации сигналов гироскопов.
Таким образом, с помощью предлагаемого способа решается задача определения вектора  по измерениям (7) с учетом одношагового алгоритма ориентации (5). Получаемый при этом вектор (6) на каждом шаге пересчитываются в кватернион (1).
по измерениям (7) с учетом одношагового алгоритма ориентации (5). Получаемый при этом вектор (6) на каждом шаге пересчитываются в кватернион (1).
Результаты моделирования показывают, что при отсутствии маневров в прямолинейном установившемся полете ошибки определения курса могут возрастать. Отсутствие переходных процессов или изменения угла рыскания приводят к ухудшению наблюдаемости оцениваемого параметра. Искусственное создание наблюдаемости привело бы к частому созданию принудительного маневра ЛА. В случае отсутствия маневров предлагается осуществлять коррекцию путем определения путевого угла и угла сноса βсн ЛА.
Так по измеренным путевым скоростям от приемника СНС VN и VE определяют путевой угол ЛА ψП (фиг. 4):

Угол сноса ЛА:

Момент ухудшения наблюдаемости по каналу курса определяют по условиям отсутствия маневра ЛА и превышения порога ошибки курса. Контрольным параметром Δψ для коррекции по путевому углу может быть разность значения угла курса ЛА, оцененного алгоритмом ФК  с вычисленным его значением по путевому углу и углу сноса, а также признак отсутствия маневра:
с вычисленным его значением по путевому углу и углу сноса, а также признак отсутствия маневра:

где величину  уточняют по техническим характеристикам датчиков из паспортных данных.
уточняют по техническим характеристикам датчиков из паспортных данных.
Определим угол сноса βсн.
Из навигационного треугольника известны соотношения (см. фиг. 4):

где:
V - путевая скорость от СНС;
 - истинная воздушная скорость от СВС;
- истинная воздушная скорость от СВС;
Uв - скорость ветра;
УВ - угол ветра, определяемый как УВ=ψв-ψП;
ψв - угол направления ветра.
Скорость ветра:

Угол направления ветра:

Тогда:

Техническим результатом использования изобретения является повышение точности при уменьшении вычислительных затрат и обеспечение непрерывной коррекции углов тангажа, крена и курса в условиях маневрирования в полете и в условиях прямолинейного невозмущенного полета, используя одноантенный приемник СНС. Способ позволяет применять датчики ДУС и ДЛУ средней и низкой точности, в том числе микромеханического типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
|
RU2754396C1 |
| Способ коррекции углов ориентации БИНС на скользящем интервале | 2022 |
|
RU2790076C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |


Изобретение относится к измерительной технике и может быть использовано для обеспечения средств навигации подвижных объектов. Сущность заявленного способа состоит в следующем. Алгоритм совместного оценивания крена, тангажа и рыскания летательного аппарата (ЛА) по измерениям трехкомпонентных датчиков угловых скоростей (ДУС), линейных ускорений (ДЛУ), одного приемника спутниковой навигационной системы (СНС) осуществляется посредством Калмановской фильтрации третьего порядка. Измерения линейных ускорений осуществляются с использованием функций, определяющих связь измерений перегрузок с параметрами полета ЛА и содержащих измерения акселерометров. В основном режиме параметры линейных скоростей и ускорений получают из проекций путевых скоростей одноантенного приемника СНС путем преобразований координат и дифференцирований. При ухудшении видимости на маршруте активируется резервный режим, при котором для уточнения курса используется путевая скорость от СНС и истинная воздушную скорость ЛА от системы воздушных сигналов (СВС). Техническим результатом осуществления заявленного изобретения является повышение точности и обеспечение непрерывной коррекции углов тангажа, крена и курса в условиях маневрирования в полете, в том числе при отсутствии сигналов от СНС в резервном режиме. 4 ил.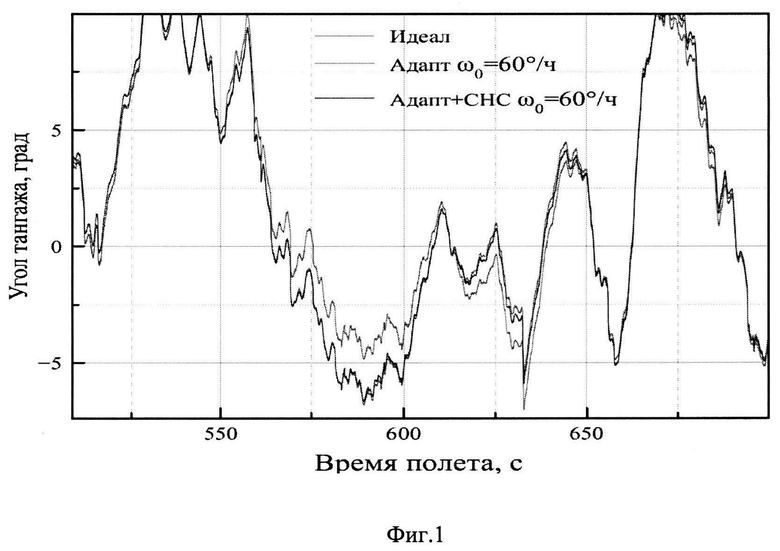
Способ коррекции углов ориентации бесплатформенной инерциальной навигационной системы (БИНС), при котором по сигналам, поступающим от датчиков угловых скоростей (ДУС) и от датчиков линейных ускорений (ДЛУ), определяют углы крена и тангажа летательного аппарата (ЛА), совместно обрабатывают сигналы, соответствующие линейным ускорениям, с сигналами, соответствующими линейным ускорениям, полученными путем преобразования параметров полета ЛА, используя при этом сигналы воздушной скорости, оценивают углы крена и тангажа посредством фильтра Калмана и осуществляют коррекцию углов крена и тангажа БИНС, отличающийся тем, что при основном режиме коррекции осуществляют оценку углов крена, курса и тангажа ЛА, используют сигналы, соответствующие линейным скоростям, полученные от приемника спутниковой навигационной системы (СНС) и их проекции в связанную систему координат, используют сигналы, соответствующие линейным ускорениям ЛА, которые получают путем сглаживания и дифференцирования сигналов скоростей от приемника СНС, с последующим проецированием их в связанную систему координат, определяют момент ухудшения наблюдаемости по каналу курса по условиям отсутствия маневра ЛА и превышения порога ошибки курса, при этом в случае ухудшения наблюдаемости переходят на резервный режим коррекции курса, при этом используют путевую скорость и воздушную скорость от системы воздушных сигналов, определяют путевой угол ЛА, определяют скорость и угол ветра, определяют угол сноса летательного аппарата и определяют курс путем вычитания из путевого угла угла сноса ЛА.
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2646954C2 |
| СПОСОБ ПЕРЕРАБОТКИ МОНАЦИТА | 2005 |
|
RU2323989C2 |
| US 5787384 A1, 28.07.1998 | |||
| CN 107643534 B, 12.07.2019. | |||

