Область техники
Изобретение относится к области малогабаритных бесплатформенных инерциальных навигационных систем (БИНС), интегрированных с различными внешними датчиковыми системами навигационной информации, для беспилотных летательных аппаратов (БПЛА).
Уровень техники
Использование малогабаритных БИНС с «грубыми» и средней точности чувствительными элементами (ЧЭ) описано в ряде патентов США корпорации American GNS, например в ряде патентов о малогабаритных микромеханических инерциальных измерительных устройствах (патенты США №№6671648, 6522992, 6516283). Основное внимание в этих патентах уделено предоставлению преимуществ по сравнению с традиционными блоками ЧЭ на основании использования внешнего корректора типа спутниковой системы (типа GPS), что является принципиальным для использования их в беспилотной авиации.
Основным недостатком данных БИНС является невозможность долговременной работы системы без спутниковой навигационной системы (СНС) (или GPS - Global Positioning System), для которой возможно организовать постановку активных помех (GPS jamming).
Наиболее близким аналогом (прототипом) к предлагаемому устройству можно признать комплексированную бесплатформенно-спутниковую систему на «грубых» чувствительных элементах (патент РФ №2380656, МПК G01C 23/00, опубл. 27.01.2010). Данная система осуществляет демпфирование ошибок с использованием разности ускорений БИНС и СНС.
Основным ограничением такой БИНС является тот факт, что она счисляет скорости и координаты в случае использования СНС. Если CHC не обеспечивает навигационного решения, рассматриваемая БИНС не осуществляет счисления текущих скоростей и координат.
Главная задача изобретения - существенное повышение точности счисления координат в автономном режиме, что является ключевым моментом использования БПЛА.
Раскрытие изобретения
Для достижения технического результата устройство интегрированной бесплатформенной системы навигации средней точности для беспилотного летательного аппарата содержит:
блок ЧЭ, состоящий из трех акселерометров и трех датчиков угловой скорости по трем ортогональным осям,
блок пересчета ускорений из связанной в навигационную систему координат,
блок вычисления линейных и угловых скоростей и географических координат,
блок формирования сигналов демпфирования,
первый и второй блоки кватернионных вычислений,
блок вычисления матрицы направляющих косинусов и углов ориентации,
приемник сигналов СНС,
блок определения качества сигнала СНС,
коммутатор векторных сигналов,
первый и второй сумматоры-вычитатели векторных сигналов,
блок определения ошибки курса,
блок определения и коррекции скорости ветра,
блок системы воздушных сигналов (СВС).
Множество связей различных сигналов между блоками и переключения связей в разных маневрах аппарата-носителя БИНС могут быть описаны по сути следующим образом.
Выходы сигналов линейных ускорений акселерометров блока ЧЭ поступают на первый вход блока пересчета ускорений из связанной в навигационную систему координат, а ко второму входу блока пересчета подключен первый выход сигналов матрицы направляющих косинусов блока вычислений матрицы направляющих косинусов и углов ориентации системы. Выходы угловых скоростей датчиков скоростей блока ЧЭ поступают на первый вход первого блока кватернионных вычислений, выход которого подключен к первому входу второго блока кватернионных вычислений, выход которого подключен к входу блока вычисления матрицы направляющих косинусов и углов ориентации и ко второму входу обратной связи первого блока кватернионных вычислений.
Выход сигналов ускорений из блока пересчета ускорений из связанной в навигационную систему координат подключен к первому входу блока вычисления линейных и угловых скоростей и географических координат.
Из приемника сигналов СНС поступают два сигнала, первый из которых - векторный сигнал линейной скорости аппарата по данным СНС поступает на плюсовый вход первого сумматора-вычитателя, а также на первый вход блока определения ошибки курса и на первый вход блока определения и коррекции скорости ветра; второй сигнал - сигнал качества связи с СНС поступает на вход блока определения качества сигнала СНС, выход которого соединен с управляющим входом коммутатора векторных сигналов.
Векторный сигнал линейной скорости системы VИНС с третьего выхода блока вычисления линейных и угловых скоростей и географических координат поступает на второй вход блока определения ошибки курса, на второй вход блока определения и коррекции скорости ветра, а также на входы вычитания первого и второго сумматоров-вычитателей, выходы которых соединены с соответствующими входами вышеуказанного коммутатора.
На плюсовый вход второго сумматора-вычитателя, а также на третий вход обратной связи блока определения и коррекции скорости ветра поступает сигнал скорости из блока СВС, на вход которого поступают сигналы скорости из блока определения и коррекции скорости ветра, на четвертый вход которого поступает выходной сигнал курса всей системы со второго выхода блока вычисления матрицы направляющих косинусов и углов ориентации.
Выход коммутатора соединен со входом блока формирования сигналов демпфирования и вторым входом блока вычисления линейных и угловых скоростей и географических координат, на третий вход которого поступает сигнал ошибки курса с выхода блока определения ошибки курса.
Векторный сигнал абсолютной угловой скорости навигационного трехгранника с первого выхода блока вычисления линейных и угловых скоростей и географических координат поступает на второй вход второго блока кватернионных вычислений, на третий и четвертый входы которого соответственно поступают управляющие корректирующие сигналы угловых скоростей со второго выхода из блока вычисления линейных и угловых скоростей и географических координат и сигналы демпфирования угловых скоростей с выхода блока формирования сигналов демпфирования.
Третий и четвертый выходы блока вычисления линейных и угловых скоростей и географических координат являются соответственно выходами всей системы по линейной скорости (или ее составляющим) и географическим координатам аппарата.
Второй, третий и четвертый выходы сигналов углов ориентации блока вычисления матрицы направляющих косинусов и углов ориентации являются соответствующими выходами системы по углам курса, тангажа и крена аппарата.
Для существенного повышения точности счисления скоростей и координат БПЛА в автономном режиме при использовании «грубых» или среднеточных ЧЭ БИНС в состав интегрированной БИНС, кроме СНС, введена СВС с блоком определения и коррекции скорости и направления ветра, а также с блоком выставки системы в азимуте на подвижном основании. При этом блок определения и коррекции скорости и направления ветра функционирует не только в присутствии сигнала СНС, но и в его отсутствии - при этом коррекция сигналов ветра осуществляется только по инерциальной информации. И при этом также использовано нетрадиционное демпфирование от СВС. Важно отметить, что в случае наличия удовлетворительного сигнала СНС система всегда находится в интегрированном режиме с СНС, и только при наличии отказа СНС система переходит в автономный режим счисления, используя сигнал СВС.
Перечень чертежей
Фиг.1 - блок-схема устройства предлагаемой системы.
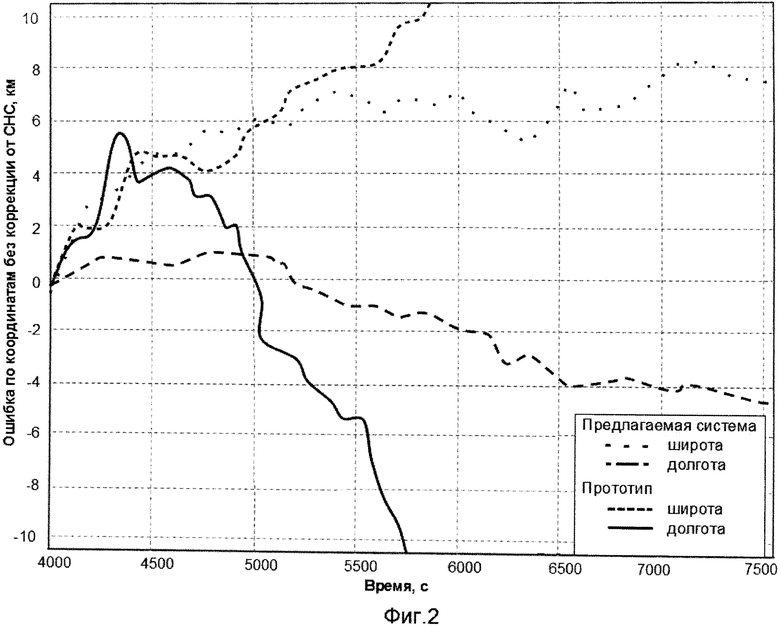
Фиг.2 - сравнение временных графиков ошибок определения координат предлагаемым устройством и прототипом в отсутствие сигнала СНС.
Осуществление изобретения
На фиг.1 блоки системы имеют следующую нумерацию: 1 - блок ЧЭ, состоящий из трех акселерометров и трех датчиков угловой скорости (ДУС), расположенных по трем ортогональным осям; 2 - блок пересчета ускорений из связанной в навигационную систему координат; 3 - блок вычисления линейных и угловых скоростей и географических координат; 4 - блок формирования сигналов демпфирования; 5 - первый блок кватернионных вычислений; 6 - второй блок кватернионных вычислений; 7 - блок вычисления матрицы направляющих косинусов и углов ориентации; 8 - блок системы связи с СНС; 9 - блок определения качества сигнала СНС; 10 - коммутатор; 11 - первый сумматор-вычитатель; 12 - второй сумматор-вычитатель; 13 - блок определения ошибки курса; 14 - блок определения и коррекции скорости ветра; 15 - блок системы воздушных сигналов.
На схеме приняты следующие обозначения сигналов устройства:
из блока 1: a b - вектор сигналов кажущихся ускорений с акселерометров в связанной системе и ωb - вектор сигналов абсолютной угловой скорости от ДУС в связанной системе координат;
из блока 2: a N - вектор кажущихся ускорений в навигационной системе координат;
из блока 3: ωN - вектор абсолютной угловой скорости навигационного трехгранника для управления вычислительной платформы;

VИНС - вектор линейной скорости аппарата относительно Земли в проекциях на оси навигационного трехгранника (VN, VE - составляющие вектора VИНС в северном и восточном направлениях);
φ, λ - выходные географические координаты аппарата: широта и долгота;
из блока 4: 
из блока 6: q0, q1, q2, q3 - кватернионы поворота от связанной системы координат к навигационной системе координат;
из блока 7: углы ориентации аппарата (выходные сигналы системы): H - курс, ϑ - тангаж, γ - крен; а также: 
из блока 8: VCHC (или V(GPS)) - вектор линейной скорости аппарата относительно Земли, определенный СНС и ее датчиками;
из блока 15: VСВС - путевая линейная скорость аппарата, определяемая системой воздушных сигналов (СВС) с учетом скорости ветра;
из блока 14: UN, UE - составляющие скорости ветра в северном и восточном направлениях;
из коммутатора 10: 
из первого сумматора-вычитателя 11: 
из второго сумматора-вычитателя 12: 
из блока 13: 
Информационный и сигнальный обмен между входами-выходами блоков осуществляют по линиям связи, показанным на блок-схемах сплошными тонкими линиями. Линии связи представляют собой известные линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др. В качестве каналов передачи данных могут использоваться различные цифровые и аналоговые каналы, например каналы информационного обмена, выполненные в соответствии с ГОСТ 18977-79 (Комплексы бортового оборудования самолетов и вертолетов. Типы функциональных связей. Виды и уровни электронных сигналов).
Устройство системы
Для повышения точности автономного счисления координат и скорости в отсутствие сигналов от СНС устройство собрано, запрограммировано, отлажено и работает следующим образом.
По величинам сигналов угловых скоростей ωb, измеряемых ДУС блока 1, рассчитываются элементы кватерниона конечного поворота от связанной системы координат к инерциальной (блок 5), а затем от инерциальной системы координат к навигационной (блок 6). По элементам (q0, q1, q2, q3) второго кватерниона конечного поворота (блок 6) в блоке 7 рассчитываются элементы матрицы направляющих косинусов 
Для следующего шага вычислений в блоке 2 по полученным элементам матрицы направляющих косинусов 
Затем в блоке 3 осуществляют вычисление линейных и угловых скоростей аппарата в навигационной системе координат и вычисление географических координат аппарата. Рассчитанные угловые скорости, а также управляющие сигналы коррекции угловых скоростей, поступают на соответствующие входы 2-го кватернионного блока (блок 6).
Для реализации сигналов демпфирования вычислительной платформы БИНС в блоках 3 и 4 используют (через коммутатор 10 векторных сигналов) разность сигналов линейных скоростей по показаниям ИНС и СНС (сумматор-вычитатель 11 векторных сигналов) или, когда сигнал СНС невозможно использовать, разность сигналов линейных скоростей по показаниям ИНС и СВС (сумматор-вычитатель 12 векторных сигналов). Переключение режима работы коммутатора 10 осуществляют в зависимости от качества принимаемого сигнала СНС, оцениваемого в блоке 9 определения качества сигнала СНС. Блок 9 работает следующим образом: качество сигнала СНС определяют по величине параметра DOP (Dilution of Precision, снижение точности). Величина DOP характеризует геометрию расположения спутников глобальной навигационной системы относительно антенны приемника СНС. Чем больше величина DOP, тем ближе друг к другу расположены спутники и, следовательно, тем ниже точность получаемых навигационных параметров. Оптимальной считается величина DOP менее 6. При величине DOP>20 или отсутствии сигнала СНС информацию СНС в дальнейших расчетах не используют.
Для вычисления путевой скорости по сигналам СВС (блок 15) необходимо к истинной воздушной скорости Vair прибавить составляющие скорости ветра UN, UE. Эти составляющие определяют в блоке 14 определения и коррекции скорости ветра:
UN=VN(GPS)-VaircosH
UE=VE(GPS)-VairsinH
Здесь VN(GPS), VE(GPS) - составляющие в северном и восточном направлениях сигнала скорости VCHC из блока 8 СНС;
Vair - истинная воздушная скорость, измеряемая СВС (в блоке 15);
H - истинный угол курса с выхода всей системы (из блока 7).
Выбранную коммутатором 10 векторную разность 




Новизна системы заключается в том, что коэффициенты демпфирования K и Kb уменьшаются ступенчатым образом в маневре аппарата (маневр определяется по сравнению величины производной угла курса с порогом скорости изменения курса 
В результате на соответствующие входы 2-го кватернионного блока 6 идут из блока 3 сигналы: вектора абсолютной угловой скорости ωN навигационного трехгранника для управления вычислительной платформы, управляющие (корректирующие) сигналы демпфирования 

Важным новым моментом является вычисление составляющих скорости ветра для случая, когда сигналы СНС невозможно использовать и при достаточно слабом маневре летательного аппарата 
В этом случае в блоке 14 по скорости VИНС рассчитывают сглаженные фильтром низких частот составляющие сигналы a
N, a
E ускорения в северном и восточном направлениях, далее модуль разности этих составляющих и составляющих (с раскладкой по синусу и косинусу текущего угла курса) ускорений, рассчитанных по показаниям сигналов СВС, сравнивают с заданным пороговым значением по ускорению δ:  ,
,  , в качестве составляющих сигналов ускорения
, в качестве составляющих сигналов ускорения  ,
,  используют не текущие мгновенные значения, а значения, сглаженные фильтром низких частот (например, апериодическим звеном). Величину порога по ускорению δ выбирают в пределах 0,1…0,2 м/с2 в зависимости от типа БПЛА.
используют не текущие мгновенные значения, а значения, сглаженные фильтром низких частот (например, апериодическим звеном). Величину порога по ускорению δ выбирают в пределах 0,1…0,2 м/с2 в зависимости от типа БПЛА.
Если пороговое условие выполняется, то считают, что скорость ветра не изменилась.
Если пороговое условие не выполняется, то составляющие UN, UE скорости ветра в северном и восточном направлениях корректируют по соответствующим интегральным формулам:
Здесь 

Для определения ошибки курса в полете используют блок 13 определения ошибки курса, в котором реализован фильтр Калмана для следующей модели системы (в качестве модели используют уравнения ошибок ИНС, связывающие ошибки скорости, ошибки курса и собственные погрешности датчиков ЧЭ):



Здесь ФN, ФE - составляющие ошибок горизонтирования в северном и восточном направлениях, Фup - ошибка в азимуте (погрешность курса); w1(t), w2(t), w3(t) - белые входные шумы; δVE, δVN - составляющие в северном и восточном направлениях ошибки ИНС по скорости. Эта ошибка - разность между VИНС и VСНС (то же самое что и V(GPS)).
Модель измерений:

Сигнал ошибки курса
Перед взлетом БПЛА осуществляют выставку БИНС в горизонт (определяют начальные углы курса и тангажа) и только при взлете при наличии сигнала СНС осуществляют выставку в азимуте и определяют ошибку курса. После чего с использованием сигнала СНС определяют составляющие скорости ветра. В случае, когда сигнал СНС недоступен, возможно осуществлять коррекцию сигнала скорости ветра только по инерциальной информации, что является принципиальным для обеспечения достаточно долгой работы системы в автономном режиме.
На фиг.2 представлены ошибки БИНС по географическим координатам широты и долготы в автономном режиме (при недоступной СНС) предлагаемой системы и прототипа. Ошибки счисления координат рассчитываются в соответствии с уравнениями алгоритма прототипа и сравниваются с расчетом по предлагаемому устройству. При этом в качестве «сырых» входных сигналов используются данные натурных испытаний. При сравнении графиков видно критическое повышение точности счисления координат в течение длительного времени (порядка нескольких тысяч секунд) автономной работы предлагаемой системы.
Предлагаемая техническая система реализована компанией ООО «ТеКнол» (Россия) в устройстве изделия «КомпаНав-3» и прошла полную серию испытаний для различных типов БПЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
| МАЛОГАБАРИТНАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ, КОРРЕКТИРУЕМАЯ ОТ СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ | 2012 |
|
RU2502049C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2382988C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
|
RU2754396C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
Изобретение относится к области приборостроения и может найти применение в малогабаритных бесплатформенных инерциальных навигационных системах (БИНС), интегрированных с различными внешними системами беспилотных летательных аппаратов (БПЛА). Технический результат - повышение точности. Для этого БИНС содержит: блок чувствительных элементов (ЧЭ), блок вычисления линейных и угловых скоростей и географических координат, блок формирования сигналов демпфирования, блоки кватернионных вычислений, блок вычисления матрицы направляющих косинусов и углов ориентации, приемник сигналов спутниковой навигационной системы (СНС), блок определения качества сигнала СНС, коммутатор векторных сигналов, первый и второй сумматоры-вычитатели векторных сигналов, блок системы воздушных сигналов (СВС), блок определения ошибки курса, блок определения и коррекции скорости ветра. 2 ил.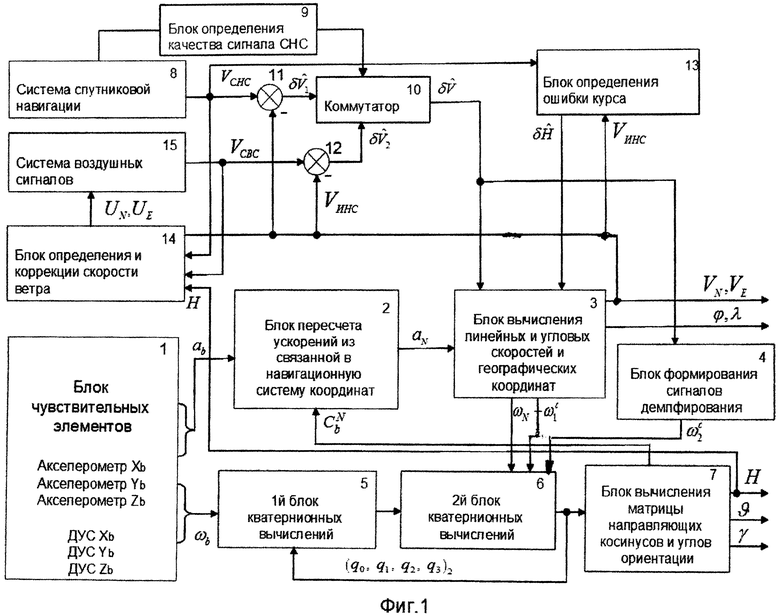
Интегрированная бесплатформенная система навигации средней точности для беспилотного летательного аппарата, содержащая блок чувствительных элементов (ЧЭ), состоящий из трех акселерометров и трех датчиков угловой скорости по трем ортогональным осям, блок пересчета ускорений из связанной в навигационную систему координат, блок вычисления линейных и угловых скоростей и географических координат, блок формирования сигналов демпфирования, первый и второй блоки кватернионных вычислений, блок вычисления матрицы направляющих косинусов и углов ориентации, приемник сигналов спутниковой навигационной системы (СНС), блок определения качества сигнала СНС, коммутатор векторных сигналов, первый и второй сумматоры-вычитатели векторных сигналов, блок определения ошибки курса, блок определения и коррекции скорости ветра, блок системы воздушных сигналов (СВС); при этом выходы сигналов линейных ускорений акселерометров блока ЧЭ поступают на первый вход блока пересчета ускорений из связанной в навигационную систему координат, а ко второму входу блока пересчета подключен выход сигналов матрицы направляющих косинусов блока вычислений матрицы направляющих косинусов и углов ориентации системы; выходы угловых скоростей датчиков скоростей блока ЧЭ поступают на первый вход первого блока кватернионных вычислений, выход которого подключен к первому входу второго блока кватернионных вычислений, выход которого подключен к входу блока вычисления матрицы направляющих косинусов и углов ориентации и ко второму входу обратной связи первого блока кватернионных вычислений; выход сигналов ускорений из блока пересчета ускорений из связанной в навигационную систему координат подключен к первому входу блока вычисления линейных и угловых скоростей и географических координат; из приемника сигналов СНС поступают два сигнала, первый из которых - векторный сигнал линейной скорости аппарата по данным СНС поступает на плюсовый вход первого сумматора-вычитателя, а также на первый вход блока определения ошибки курса и на первый вход блока определения и коррекции скорости ветра; второй сигнал - сигнал качества связи с СНС поступает на вход блока определения качества сигнала СНС, выход которого соединен с управляющим входом коммутатора векторных сигналов; векторный сигнал линейной скорости системы с третьего выхода блока вычисления линейных и угловых скоростей и географических координат поступает на второй вход блока определения ошибки курса, на второй вход блока определения и коррекции скорости ветра, а также на входы вычитания первого и второго сумматоров-вычитателей, выходы которых соединены с соответствующими входами вышеуказанного коммутатора; на плюсовый вход второго сумматора-вычитателя, а также на третий вход обратной связи блока определения и коррекции скорости ветра поступает сигнал скорости из блока СВС, на вход которого поступают сигналы скорости из блока определения и коррекции скорости ветра, на четвертый вход которого поступает выходной сигнал курса всей системы со второго выхода блока вычисления матрицы направляющих косинусов и углов ориентации; выход коммутатора соединен со входом блока формирования сигналов демпфирования и вторым входом блока вычисления линейных и угловых скоростей и географических координат, на третий вход которого поступает сигнал ошибки курса с выхода блока определения ошибки курса; векторный сигнал абсолютной угловой скорости навигационного трехгранника с первого выхода блока вычисления линейных и угловых скоростей и географических координат поступает на второй вход второго блока кватернионных вычислений, на третий и четвертый входы которого соответственно поступают управляющие корректирующие сигналы угловых скоростей со второго выхода из блока вычисления линейных и угловых скоростей и географических координат и сигналы демпфирования угловых скоростей с выхода блока формирования сигналов демпфирования; третий и четвертый выходы блока вычисления линейных и угловых скоростей и географических координат являются соответственно выходами всей системы по линейной скорости и географическим координатам аппарата; второй, третий и четвертый выходы сигналов углов ориентации блока вычисления матрицы направляющих косинусов и углов ориентации являются соответствующими выходами системы по углам курса, тангажа и крена аппарата.
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| US 6408245 B1, 18.06.2002 | |||
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| US 3883812 A, 13.05.1975 | |||
| DE 19510910 A1, 28.09.1995 | |||
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |

