Изобретение относится к пассивным оптическим способам селекции движущегося объекта на неподвижном фоне в наблюдаемой сцене.
Известен способ селекции объекта, заключающийся в приеме излучения от объекта и фона, регистрации первого и второго изображений объекта и фона в моменты времени t1 и t2, вычитании сформированных изображений и селекции объекта по результирующему изображению [Молебный В.В. Оптико-локационные системы. - М.: Машиностроение, 1981. Достижения в технике передачи и воспроизведения изображений./Под ред. Б.Кейзана. - М.: Мир, т.1, 1980, с.292, 294, рис.22, 23.].
Недостатком данного способа является низкая точность селекции малоподвижного объекта при частичном перекрытии его образов на разностном изображении, заключающимся в искажении выделенной формы объекта (исчезновении сигнала в области перекрытия).
В качестве прототипа выбран способ селекции объекта [патент RU 2081436, МПК G01S 17/00, 19.11.1984], заключающийся в последовательной регистрации первого, второго и третьего изображений объекта и фона, формировании первого и второго разностных изображений, преобразовании разностных изображений в бинарные и выделении изображения объекта в виде общей ненулевой области первого и второго разностных изображений.
К недостаткам данного способа можно отнести:
1. Низкую точность селекции вследствие искажения выделенной формы объекта, образы которого частично перекрываются на разностных изображениях. Искажение заключается в частичной потере сигнала в области перекрытия образов.
2. Невозможность обнаружения малоподвижных объектов вследствие полного перекрытия их образов на разностных изображениях.
3. Невозможность селекции объекта с динамически изменяющейся яркостью относительно фона, т.е. когда объект становится то светлее, то темнее фона.
4. Низкая информативность вследствие получения изображения объекта, соответствующего только одному моменту времени.
Задачей, стоящей перед настоящим изобретением, является повышение точности селекции движущегося объекта безотносительно к изменению его яркости относительно фона.
Поставленная задача решается следующим образом.
В способе селекции движущегося объекта, заключающемся в последовательной регистрации трех изображений контролируемого участка пространства в последовательные первый, второй и третий моменты времени, формировании разностных изображений и дальнейшей их обработке для формирования итогового изображения с полезной информацией, согласно изобретению формируют первое, второе и третье контурные изображения из изображений, зарегистрированных в первый, второй и третий моменты времени соответственно, первое и второе разностные изображения формируют путем вычитания первого из второго и первого из третьего контурных изображений соответственно, выделяют селекторное поле в виде общих ненулевых областей первого и второго разностных изображений, формируют первое и второе итоговые изображения путем обнуления областей, соответствующих селекторному полю, на первом и втором разностном изображениях соответственно.
Техническая сущность изобретения заключается в следующем:
- в повышении точности селекции объекта за счет уменьшения зоны исчезновения сигнала в области перекрытия образов объекта на разностных изображениях вследствие оконтуривания зарегистрированных изображений и дальнейшей их обработки, что также обеспечивает возможность селекции объекта с динамически изменяющейся яркостью;
- в повышении вероятности селекции малоподвижных объектов за счет формирования второго разностного изображения из оконтуренных изображений, соответствующих достаточно разнесенным моментам времени, а именно первому и третьему;
- в повышении информативности за счет формирования двух итоговых изображений, на первом из которых присутствует изображение объекта, движущегося относительно неподвижного фона в интервале между первым и вторым моментами времени, а на втором - в интервале между первым и третьим моментами времени.
Кроме того, для отсечения влияния удаленного подвижного фона и обеспечения возможности проведения дополнительной селекции объекта по расстоянию регистрацию изображения контролируемого участка пространства осуществляют двумя идентичными пространственно разнесенными каналами регистрации, формирующими стереопары зарегистрированных, контурных, разностных и итоговых изображений. На каждой стереопаре первых и вторых итоговых изображений по параллактическому смещению выделенных контуров объекта определяют расстояния до объекта.
Кроме того, для обеспечения возможности отслеживания траектории движения объекта регистрацию и обработку ведут непрерывно и последовательно, причем обрабатывают каждое вновь зарегистрированное изображение и два ближайших, ему предшествующих.
На фиг.1 схематично показаны регистрируемые и получаемые в результате обработки изображения:
а - изображение, регистрируемое в момент времени t1;
б - изображение, регистрируемое в момент времени t2;
в - изображение, регистрируемое в момент времени t3;
г - контурное изображение, соответствующее времени t1;
д - контурное изображение, соответствующее времени t2;
е - контурное изображение, соответствующее времени t3;
ж - первое разностное изображение;
з - второе разностное изображение;
и - селекторное поле;
к - первое итоговое изображение;
л - второе итоговое изображение.
Позицией 1 обозначен движущийся объект.
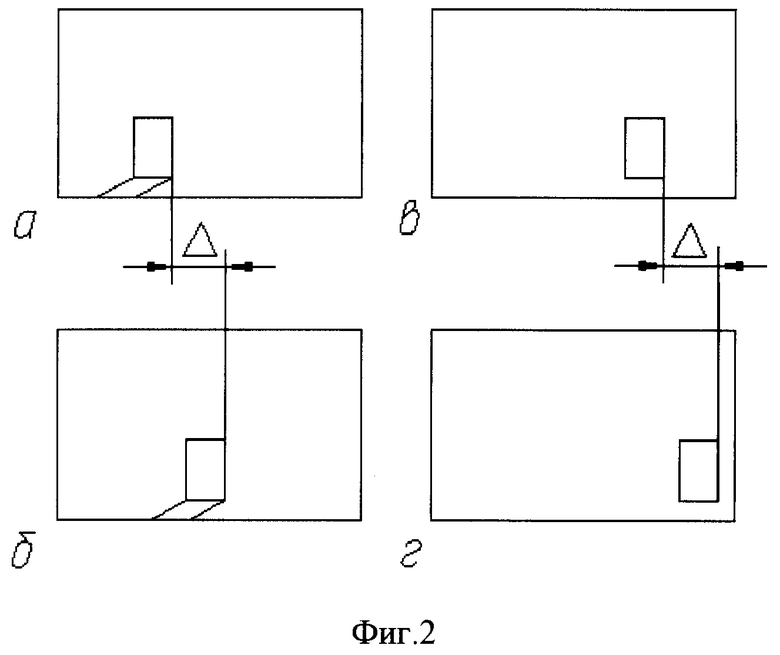
На фиг.2 (а, б) показано параллактическое смещение (Δ) контура движущегося объекта на стереопаре первых итоговых изображений, а на фиг.2 (в, г) - на стереопаре вторых итоговых изображений.
На фиг.3 (а, б, в, г) показана серия последовательно зарегистрированных кадров. На фиг.3 (д, е) приведены первое и второе итоговые изображения при обработке серии кадров а, б, в, на фиг.3 (ж, з) - первое и второе итоговые изображения при обработке серии б, в, г кадров.
Способ реализуется следующим образом.
В последовательные моменты времени t1, t2, t3 регистрируют изображения а, б, в, фиг.1. На зарегистрированных изображениях присутствует неподвижный фон и движущийся объект 1 с его тенью. В зависимости от ожидаемой скорости движущегося объекта выбирают периодичность между моментами регистрации изображений с таким расчетом, чтобы смещение объекта на регистрируемых изображениях составляло минимально один пиксель.
Изображение (фиг.1а), зарегистрированное в момент времени t1, соответствует матрице I1. Соответственно, изображениям, зарегистрированным в моменты времени t2 и t3, соответствуют матрицы I2 и I3.
Зарегистрированные изображения (или матрицы) I1, I2, I3 преобразуют в контурные изображения C1, C2, С3 (фиг.1г, д, е).
Оконтуривание может производиться методами Кэнни, Собеля, Робертса, Прювитта или другими широко известными в области цифровой обработки изображений.
Получают первое разностное изображение (матрица R1), равное модулю разности первого (С1) и второго (С2) контурных изображений, (фиг.1ж):
 для 1≤i≤I, 1≤j≤J,
для 1≤i≤I, 1≤j≤J,
где i - количество строк в регистрируемом изображении, a j-количество столбцов.
Получают второе разностное изображение (матрица R2), равное модулю разности первого (С1) и третьего (С3) контурных изображений, (фиг.1з):
 для 1≤i≤I, 1≤j≤J.
для 1≤i≤I, 1≤j≤J.
Находят селекторное поле (SF) в виде общих ненулевых элементов матриц первого (R1) и второго (R2) разностных изображений (фиг.1и):
SF(i,j)=1, при R1(i,j)>0 и R2(i,j)>0;
SF(i,j)=0, при R1(i,j)=0 и/или R2(i,j)=0,
при 1≤i≤I, 1≤j≤J.
Находят первое итоговое изображение (Res1), обнуляя элементы матрицы первого разностного изображения (R1(i,j)), если соответствующие элементы матрицы селекторного поля (SF(i,j)) равны 1. Данную операцию можно записать в виде формулы:
Res1(i,j)=R1(i,j)*(1-SF(i,j)), при 1≤i≤I, 1≤j≤J.
Находят второе итоговое изображение (Res2), обнуляя элементы матрицы второго разностного изображения (R2(i,j)), если соответствующие элементы матрицы селекторного поля (SF(i,j)) равны 1:
Res2(i,j)=R2(i,j)*(1-SF1(i,j)), при 1≤i≤I, 1≤j≤J.
Первое итоговое изображении содержит контуры объекта, двигавшегося относительно неподвижного фона в интервале времени [t1, t2], а на втором итоговом изображении - в интервале времени [t1, t3].
Два итоговых изображения обеспечивают повышенную информативность селекции объекта. Например, в случае селекции высокоскоростного объекта к моменту времени t3 объект может выйти за пределы кадра третьего регистрируемого изображения, т.е. присутствовать только на первом итоговом изображении.
Кроме того, при регистрации малоподвижного объекта, сместившегося за интервал времени [t1, t2] на столь малую величину, что его образы на первом и втором зарегистрированных изображениях можно считать совпавшими, объект воспринимается, как неподвижный. На первом итоговом изображении объект будет отсутствовать. Однако в интервале времени [t1, t3] смещение образов становится уже детектируемым и на втором итоговом изображении контуры объекта будут присутствовать.
При этом не имеет значения светлей или темней объект относительно фона, его контуры позволяют с достаточно высокой степенью вероятности определить вид объекта.
При необходимости проведения одновременной селекции объекта по фактору движения и удаленности от наблюдателя (отсечение графика на удаленном фоне, фиг.1а, б, в) производят следующую последовательность операций.
В моменты времени t1, t2, t3 регистрируют две тройки изображений двумя идентичными пространственно разнесенными каналами регистрации (каждый канал регистрирует три последовательных изображения), причем регистрируемые и формируемые в результате обработки соответствующие изображения являются стереопарами.
На полученной стереопаре первых итоговых изображений находят параллактическое смещение (Δ) контура объекта (фиг.2а, б). Аналогично находят параллактическое смещение контура объекта на стереопаре вторых итоговых изображений (фиг.2в, г). Вычисляют по параллактическим смещениям расстояния до объектов (методика, широко применяемая в астрономии). Производят селекцию объекта по расстоянию, обнуляя для одного из каналов регистрации области, соответствующие контурам объекта, находящегося вне указанного диапазона расстояний, например движущегося по железнодорожному полотну поезда на заднем плане.
Для обеспечения возможности непрерывного отслеживания перемещения объекта и построения траектории его движения (трассирования) регистрацию проводят непрерывно и последовательно, как показано на фиг.3 (а, б, в, г).
Для первых трех изображений, зарегистрированных в моменты времени t1, t2, t3, итоговые изображения приведены на фиг.3 (д, е) и осуществлены они описанным выше способом. Изображения, приведенные на фиг.3 (б, в, г), зарегистрированы в моменты t2, t3, t4, и для них итоговые изображения приведены на фиг.3 (ж, з), при этом фиг.3е идентична фиг.3ж.
Способ реализуется при помощи цифровой регистрирующей фотоаппаратуры и высокоскоростной вычислительной техники, например программируемой логической интегральной схемы, по заложенным в них алгоритмам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЁННОМ ФОНЕ | 2013 |
|
RU2552123C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЕННОМ ФОНЕ | 2007 |
|
RU2363018C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2013 |
|
RU2535631C2 |
| СПОСОБ СЕЛЕКЦИИ ПО ДАЛЬНОСТИ МНОЖЕСТВЕННЫХ ОБЪЕКТОВ | 2012 |
|
RU2498336C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПОД ВОДОЙ | 2009 |
|
RU2424542C2 |
| Способ локализации появления цели среди стационарных объектов с движущегося носителя | 2024 |
|
RU2834194C1 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА УДАЛЕННОМ ФОНЕ ОПТИЧЕСКИМИ СИСТЕМАМИ С ВОЗДУШНОГО НОСИТЕЛЯ | 2019 |
|
RU2714701C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2008 |
|
RU2383901C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА | 1986 |
|
RU2107929C1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ И ПАНОРАМНАЯ АППАРАТУРА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2420774C2 |

Изобретение относится к пассивным оптическим способам селекции движущегося объекта на неподвижном фоне в наблюдаемой сцене. Способ заключается в последовательной регистрации трех изображений контролируемого участка пространства в последовательные первый, второй и третий моменты времени и формировании из них трех контурных изображений. Затем формируют два разностных изображения путем вычитания первого из второго и первого из третьего контурных изображений. Выделяют селекторное поле в виде общих ненулевых областей первого и второго разностных изображений и формируют первое и второе итоговые изображения путем обнуления областей, соответствующих селекторному полю на первом и втором разностных изображениях. При такой обработке контролируемого участка пространства, по крайней мере, на одном из итоговых изображений появятся контуры движущегося объекта. Способ обеспечивает повышенную точность селекции движущегося объекта независимо от изменения его яркости относительно фона и скорости перемещения. 2 з.п. ф-лы, 3 ил.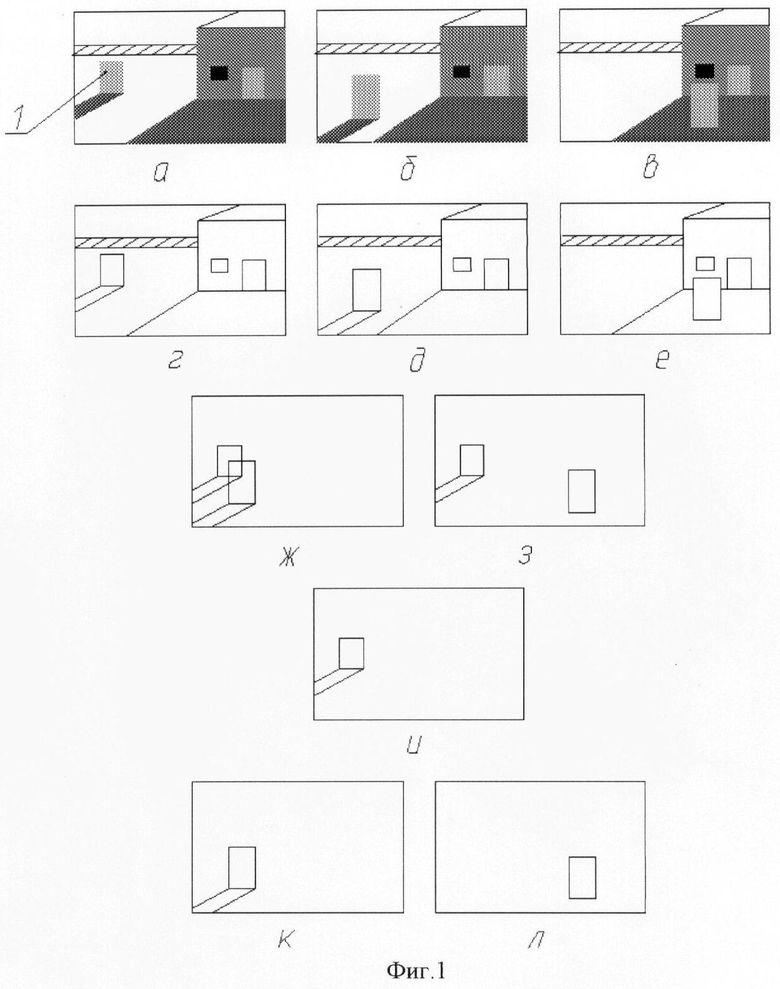
1. Способ селекции движущегося объекта, заключающийся в последовательной регистрации трех изображений контролируемого участка пространства в последовательные первый, второй и третий моменты времени, в формировании двух разностных изображений и в дальнейшей их обработке для формирования итогового изображения с полезной информацией, отличающийся тем, что формируют первое, второе и третье контурные изображения из зарегистрированных изображений в первый, второй и третий моменты времени, соответственно, первое и второе разностные изображения формируют путем вычитания первого из второго и первого из третьего контурных изображений, соответственно, выделяют селекторное поле в виде общих ненулевых областей первого и второго разностных изображений, формируют первое и второе итоговые изображения, путем обнуления областей, соответствующих селекторному полю, на первом и втором разностных изображениях, соответственно.
2. Способ селекции движущегося объекта по п.1, отличающийся тем, что регистрацию изображений контролируемого участка пространства в указанные моменты времени осуществляют двумя идентичными пространственно разнесенными каналами регистрации, формирующими стереопары зарегистрированных, контурных, разностных и итоговых изображений, при этом на каждой стереопаре первых и вторых итоговых изображений по параллактическому смещению выделенных контуров объекта определяют расстояние до объекта.
3. Способ селекции движущегося объекта по п.1 или 2, отличающийся тем, что регистрация изображений и их обработка идет непрерывно и последовательно во времени, причем обрабатываются каждое вновь зарегистрированное изображение и два ближайших ему предшествующих.
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА | 1984 |
|
RU2081436C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА | 1986 |
|
RU2107929C1 |
| RU 2006135285 A, 10.04.2008 | |||
| US 4233631 A, 11.11.1980. | |||

