Область техники
Изобретение относится к системам для определения местоположения цели с использованием отражения электромагнитных волн. Более конкретно, к оптическим стереоскопическим способам определения местонахождения объекта в окружающем пространстве, включающим определение расстояний до интересующих объектов, а также их угловых координат.
Предшествующий уровень техники
Известен способ, описанный в патенте РФ № 2703611 на изобретение «Способ получения стереоскопических снимков с синтезированной величиной стереобазы», МПК G03B 35/10 (2006.01), G01S 17/06; Заявка: 2019102362, приоритет: 28.01.2019, опубликовано 21.10.2019; патентообладатель: Акционерное общество "Стелла-К" (RU).
Способ получения стереоскопических снимков с синтезированной величиной стереобазы, заключающийся в приеме и формировании опорного и сравниваемого стереоизображений не двумя, а одной видеосистемой на основе анализа величины параллакса между изображениями одних и тех же целей (объектов) на совмещенных снимках стереопары, посредством формирования стереоснимков не двумя, а одной, но движущейся камерой, при этом скорость движения и интервал между кадрами в движении определяют величину формируемой (синтезируемой) базы стереоснимков посредством компьютерного выравнивания обоих снимков по горизонтали, со смещением второго снимка стереопары влево или вправо так, чтобы наиболее удаленный объект на первом и втором снимках стереопары находился на одной вертикали, что позволяет через уменьшение параллакса между деталями удаляющихся от камеры объектов и через уменьшение параллакса до нуля у наиболее удаленных от камеры объектов определить с высокой точностью расстояние (дальность) для множественных целей на местности с высокой территориальной протяженностью в реальном масштабе времени.
Недостатком данного способа является то, что компьютерное выравнивание по горизонтали по наиболее удаленному объекту явно недостаточно для совмещения изображений и крайне затруднительно при отсутствии дальнего фона(объектов), например, на лесной дороге. Кроме того данный способ позволяет получать стереоскопические снимки, но их обработка без точного совмещения требует существенного усложнения программного обеспечения в части локализации наблюдаемых объектов. В нашем случае мы имеем дело с появляющимися или со смещающимися объектами, тогда как стационарно стоящие объекты не рассматриваются.
Известен также способ, описанный в патенте РФ № 2189065 на изобретение «Система наблюдения и прицеливания», МПК G02B 23/12, F41G 1/40 (2000.01),Заявка: 2014112774/11, приоритет 03.04.2014, опубликовано 10.08.2015, авторы и патентообладатели: Дубинин Д.Б. (RU), Овчинников Ю.С. (RU).
Система наблюдения и прицеливания, содержащая последовательно расположенные и оптически сопряженные сканирующее устройство, формирующее оптическое устройство, поворотное оптическое устройство и устройство визуального наблюдения, отличающаяся тем, что сканирующее устройство содержит зеркальную оптическую головку, механически сопряженную с устройством привода и стабилизации поля зрения, которое электрически связано с блоком управления зеркальной оптической головкой, устройство визуального наблюдения включает дневной видеоканал, содержащий дневную видеокамеру с установленным перед ней сменным объективом, ночной видеоканал, содержащий ночную видеокамеру, видеопроцессорное устройство, электрически сопряженное с дневной и ночной видеокамерами, устройство преобразования сигналов, электрически сопряженное с видеопроцессорным устройством, и видеомонитор, электрически сопряженный с устройством преобразования сигналов, кроме того, в систему наблюдения и прицеливания дополнительно введены лазерный дальномер, оптически сопряженный с зеркальной оптической головкой, формирующим оптическим устройством и поворотным оптическим устройством и электрически сопряженный с видеопроцессорным устройством, устройство выверки, расположенное между зеркальной оптической головкой и формирующим оптическим устройством и оптически сопряженное с лазерным дальномером, зеркальной оптической головкой и формирующим оптическим устройством, и пульт управления, электрически сопряженный с видеопроцессорным устройством, устройством преобразования сигналов и блоком управления зеркальной оптической головкой.
Недостатком данного способа является излишняя сложность и невозможность полностью автоматической оперативной работы по выявлению целей. В условиях расположения устройства на движущемся носителе даже с малой скоростью перемещения возникают сомнения в его работоспособности, когда поле зрения подвергается значительным смещениям, особенно, в случае близкого фона, например, леса, затеняющего искомые объекты.
В качестве прототипа был выбран способ, описанный в патенте РФ№ 2552123, на изобретение «Способ селекции объектов на удалённом фоне», МПК G01S 17/06 (2006.01), G01S 17/66; Заявка: 2013147224/28, приоритет 22.10.2013;опубликовано 10.06.2015, авторы: Подгорнов В.А. и Подгорнов С.В. (RU);патентообладатель: ФГУП «РФЯЦ-ВНИИТФ им. академ. Е.И. Забабахина» (RU).
Признаками в прототипе, совпадающими с существенными признаками заявляемого изобретения, являются: формировании опорного и сравниваемого изображений, с параллельными главными оптическими осями их объективов, регистрации обоих изображений, формировании двух разностных изображений, вектор движения образует угол с направлением главных оптических осей объективов оптических систем, при этом каждую пару опорного и сравниваемого изображений последовательно регистрируют в двух разнесенных точках пространства.
Недостатком данного способа является то, что его работоспособность практически невозможна при наличии большого количества объектов в поле зрения, особенно, вблизи от видеосистем. Способ эффективен для обнаружения объектов на удаленном фоне, вычитание которого по данному способу позволяет выявлять искомые объекты, например, самолеты.
Используемый в способе поиск в направлении параллактического смещения фона величины сдвига между ненулевыми фрагментами первого разностного изображения и соответствующими им ненулевыми фрагментами второго разностного изображения до максимального их совпадения практически нереализуем в случае большого количества ненулевых фрагментов, соответствующих объектам, расположенным на разных расстояниях, и особенно в случае затенения более дальних объектов ближними, например, в лесу, среди застроек.
Раскрытие изобретения.
Задачей, на решение которой направлено заявляемое изобретение, является способность обнаруживать движущуюся или появляющуюся цель, находящуюся среди большого количества объектов, расположенных на разных расстояниях, и особенно когда более близкие объекты закрывают от наблюдателя удалённую цель, например, в лесу, или среди строений.
Технический результат, достигаемый при решении этой задачи, заключается в повышении обнаружительной способности при поиске объектов в сложной фоновой обстановке и при возможном их затенении.
Затенение – состояние, когда более близкие объекты закрывают от наблюдателя удалённую цель, например, в лесу, или среди строений.
Указанный технический результат достигается тем, что в предлагаемом способе локализации появления цели среди стационарных объектов с движущегося носителя, заключающемся в приеме и формировании опорного и сравниваемого изображений двумя расположенными на носителе идентичными оптическими системами с параллельными главными оптическими осями их объективов, последовательной регистрации обоих изображений в процессе поступательного движения оптических систем. Согласно изобретению, регистрируют изображения с опорной оптической системы в первый момент времени и со сравниваемой оптической системы во второй момент времени, когда она максимально приближается к положению опорной оптической системы в первый момент времени. Совмещают полученные изображения и проводят их сравнение с целью выявления появившейся или сдвинувшейся цели на разностном изображении, определяют угловые координаты локализованной цели относительно носителя.
Краткое описание фигур и чертежей.
Предлагаемый способ локализации появления цели среди стационарных объектов с движущегося носителя иллюстрируется чертежами:
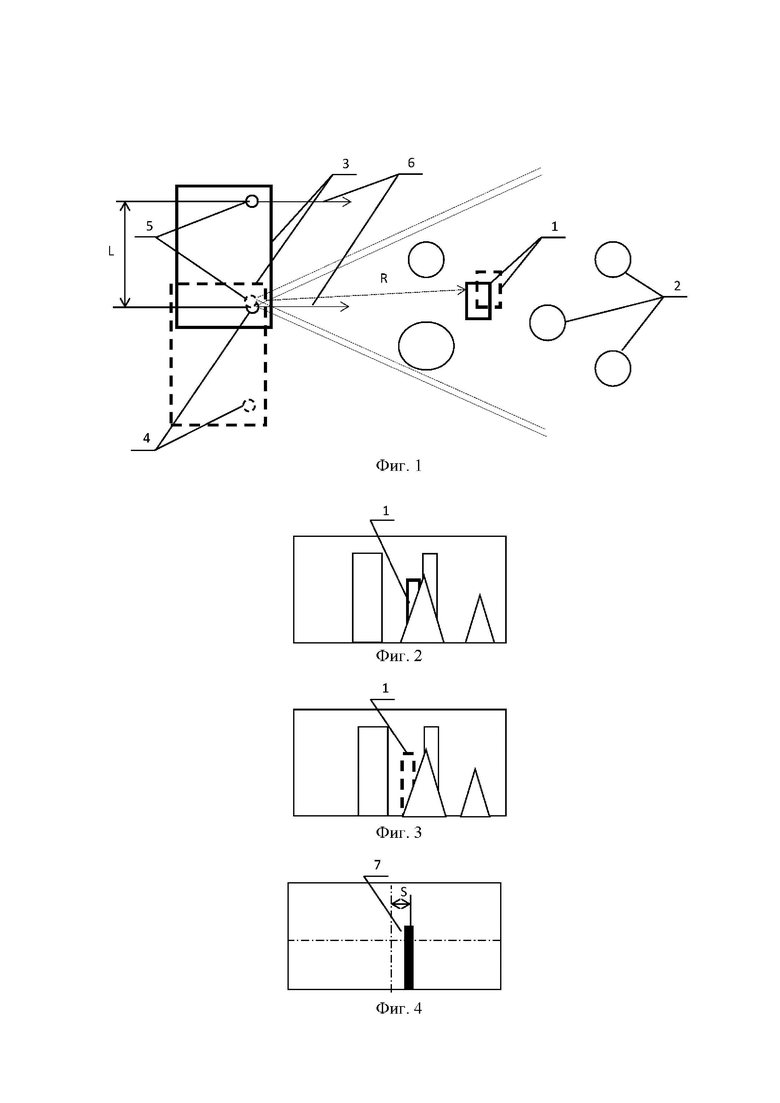
На фиг. 1 показана схема регистрации изображения оптическими системами на движущемся объекте, вид сверху.
На фиг. 2 показано изображение от первой оптической системы.
На фиг. 3 показано изображение от второй оптической системы.
На фиг. 4 показано разностное изображение.
Варианты осуществления изобретения.
Способ локализации появления цели среди стационарных объектов с движущегося носителя реализован на устройстве, как это показано на фиг.1. Цель1 в первый момент времени находится среди стационарных объектов 2 и частично видна с подвижного носителя 3. На носителе 3 установлены опорная оптическая система 4 и сравниваемая оптическая система 5. Главные оптические оси 6объективов оптических систем 4 и 5 параллельны друг другу. Движущийся носитель 3 и оптические системы 4 и 5, а также цель 1 в первый момент времени изображены сплошной линией, а во второй момент времени - пунктирной линией.
Способ реализуется следующим образом.
На движущемся носителе 3 в первый момент времени принимают, формируют и регистрируют опорное изображение (фиг.2) опорной оптической системой 4 (фиг.1). Носитель 3 продвигается вперёд до того положения, когда сравниваемая оптическая система 5 во второй момент времени максимально приближается к положению опорной оптической системы 4 в первый момент времени. Во второй момент времени формируют и регистрируют сравниваемое изображение (фиг.3) сравниваемой оптической системой 5 (фиг.1).
Совмещают полученные изображения (фиг.2 и фиг.3) и проводят их сравнение с целью выявления появившейся или сдвинувшейся цели 1 – ее локализованной части 7 на разностном изображении (фиг.4).
Определяют угловые координаты (азимут и угол возвышения) локализованной цели 7 относительно главной оптической оси 6 сравниваемой оптической системы 5 по координатам на разностном изображении фиг.4.
Для получения большей информации о местоположении цели 1дополнительно к угловым координатам определяют расстояние до выявленной цели 1. Для этого во второй момент времени одновременно с системой 5 проводят регистрацию изображения системой 4. При этом система 5 и система 4 образуют стереопару со стереобазисом L, равным расстоянию между системами 4 и 5.Расстояние R до выявленной цели определяется R = F×L/S, где S – величина стереосдвига локализованной цели 7 на ее изображениях фиг.3 и фиг.4, F – фокусное расстояние объективов оптических системам 4 и 5.
Заявляемый способ локализации появления цели среди стационарных объектов с движущегося носителя по сравнению с прототипом позволяет обеспечить поиск целей в недоступном для прототипа случае большого количества объектов, расположенных на разных расстояниях, и особенно в случае затенения более дальних объектов ближними, например, в лесу, или среди строений.
Промышленная применимость
Возможно использование изобретения при поиске целей в сложной фоновой обстановке и при возможном их затенении, например, в лесу или среди строений. В целом, рассмотренный вариант выполнения изобретения был реализован на существующем в настоящее время оборудовании с использованием имеющихся материалов. Это подтверждает его работоспособность, получение технического результата и промышленную применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЁННОМ ФОНЕ | 2013 |
|
RU2552123C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2008 |
|
RU2383900C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2006 |
|
RU2331084C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ С ПОВЫШЕННЫМ БЫСТРОДЕЙСТВИЕМ НА ВЫСОКОКОНТРАСТНОМ ДИНАМИЧЕСКИ ИЗМЕНЯЕМОМ ФОНЕ | 2014 |
|
RU2576471C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2013 |
|
RU2535631C2 |
| Способ получения стереоскопических снимков с синтезированной величиной стереобазы | 2019 |
|
RU2703611C1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ И ПАНОРАМНАЯ АППАРАТУРА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2420774C2 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2008 |
|
RU2383902C2 |
| СИСТЕМА НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2000 |
|
RU2189065C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЕННОМ ФОНЕ | 2007 |
|
RU2363018C1 |
Изобретение относится к способам определения местонахождения объекта в окружающем пространстве. Сущность изобретения заключается в следующем. На движущемся носителе в первый момент времени принимают, формируют и регистрируют опорное изображение опорной оптической системой. Носитель продвигается вперёд до того положения, когда сравниваемая оптическая система во второй момент времени максимально приближается к положению опорной оптической системы в первый момент времени. Во второй момент времени формируют и регистрируют сравниваемое изображение сравниваемой оптической системой. Совмещают полученные изображения и проводят их сравнение с целью выявления появившейся или сдвинувшейся цели ее локализованной части на разностном изображении. Определяют угловые координаты - азимут и угол возвышения - локализованной цели относительно главной оптической оси сравниваемой оптической системы по координатам на разностном изображении, а также определяют расстояние до локализованной цели. Технический результат заключается в повышении обнаружительной способности при поиске объектов. 4 ил.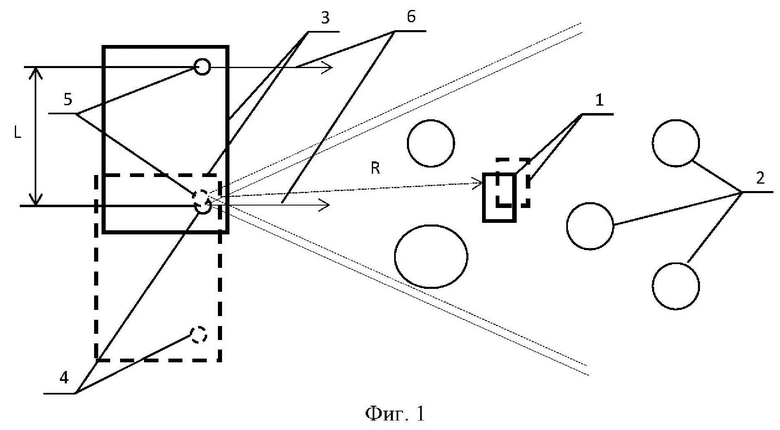
Способ локализации появления цели среди стационарных объектов с движущегося носителя, заключающийся в приеме и формировании опорного и сравниваемого изображений двумя расположенными на носителе идентичными оптическими системами с параллельными главными оптическими осями их объективов, последовательной регистрации обоих изображений в процессе поступательного движения оптических систем, отличающийся тем, что регистрируют изображение в первый момент времени с опорной оптической системы, регистрируют изображение во второй момент времени со сравниваемой оптической системы, когда она максимально приближается к положению опорной оптической системы в первый момент времени, совмещают полученные изображения и проводят их сравнение с целью выявления появившейся или сдвинувшейся цели на разностном изображении, определяют угловые координаты локализованной цели относительно носителя, при этом во второй момент времени одновременно со сравниваемой оптической системой проводят регистрацию изображения опорной оптической системой, составляющей со сравниваемой оптической системой стереопару со стереобазисом L, определяют стереосдвиг S локализованной цели на изображениях, полученных во второй момент времени, определяют расстояние до локализованной цели по формуле R=F×L/S, где F – фокусное расстояние объективов оптических систем.
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЁННОМ ФОНЕ | 2013 |
|
RU2552123C2 |
| Способ получения стереоскопических снимков с синтезированной величиной стереобазы | 2019 |
|
RU2703611C1 |
| СИСТЕМА НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2000 |
|
RU2189065C2 |
| JP 2011185664 A, 22.09.2011. | |||

