Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к системам автоматического рулевого управления транспортными средствами и, в частности, к автоматическим системам, предназначенным для широкого диапазона транспортных средств повышенной проходимости с различными механизмами рулевого управления.
Уровень техники
Существующие системы автоматического рулевого управления для внедорожных транспортных средств, такие как имеющаяся в продаже полуавтоматическая система рулевого управления для тракторов John Deere GreenStar™ Auto Trac, для обеспечения взаимодействия с системой рулевого управления транспортного средства обычно требуют наличия вспомогательной электрогидравлической системы рулевого управления. Для обеспечения навигации транспортного средства в автоматическом режиме обрабатывается комбинация сигналов от глобальной системы определения местоположения и датчиков транспортного средства. Для управления взаимодействием между системами ручного и автоматического управления требуются электрогидравлический клапан, датчик угла поворота рулевого колеса и датчик движения рулевого колеса для ручной коррекции движения водителем. Для установки такой автоматической системы требуется много часов работы и знание системы рулевого управления, гидравлики и электрики транспортного средства. Автоматическая система требует специальной подгонки к конкретной системе рулевого управления транспортного средства. На некоторых транспортных средствах, таких как оснащенные двухконтурной гиростатической системой рулевого управления, применение такой системы может быть ограничено. Некоторые типы систем автоматического управления, такие как описанные в патенте США №5234070, требуют наличия специальной муфты, которая расцепляется в одном из режимов рулевого управления. Многие системы требуют наличия отдельного датчика угла поворота рулевого колеса.
В системе другого типа электродвигатель с фрикционным приводом, приводящим в движение рулевое колесо, опирается на рулевую колонку. Такой дополнительный блок часто не может быть полностью интегрирован в систему, а открытая система фрикционного привода создает зоны защемления и подвергается износу как во фрикционном приводе, так и на рулевом колесе. Любое проскальзывание в приводе приводит к нестабильности в системе рулевого управления и неблагоприятно сказывается на точности рулевого управления. В системе также отсутствуют признаки измерения инерции или кинематики в реальном масштабе времени (RTK) для обеспечения значений точности, часто требуемых для применения в автоматическом управлении.
Существует потребность в более простой, менее дорогостоящей и более простой в установке системе автоматического рулевого управления, использование которой свело бы к минимуму или вообще устранило необходимость существенных модификаций рулевой системы или применения специальных муфт. Дополнительно к этому существует потребность в более точной и надежной системе, чем по меньшей мере большинство доступных в настоящее время модернизированных систем, и более пригодную для интеграции как с точки зрения функциональности, так и эстетики, в большинство существующих механизмов рулевого управления.
Раскрытие изобретения
Изобретение представляет собой механизм для преобразования обычной ручной системы управления внедорожного транспортного средства в автоматическую систему, использующую дистанционные сигналы. Шаговый двигатель соединен с приводной звездочкой или шкивом, установленным на рулевом вале, посредством цепной или ременной передачи. Шаговый двигатель соединен с микропроцессором и обеспечивает движение рулевого вала как в ручном, так и в автоматическом режиме рулевого управления. Сигнал, подаваемый с кодера в микропроцессор, переводит режим работы в ручной в случае, если число шагов, зафиксированных шифратором, отличается от ожидаемого. Узел, включающий дублирующее рулевое колесо, вал шкива и шаговый двигатель, легко устанавливается на рулевую колонку и хорошо сочетается как с точки зрения функциональности, так и эстетики с большинством внедорожных транспортных средств. Расположение приводного механизма на самом верхнем конце рулевого вала облегчает обычный монтаж устройства. В узле предусмотрены втулки для согласования конкретной конфигурации рулевого вала со звездочкой и шкивом. В другом варианте выполнения двигатель может быть установлен непосредственно на конце вала без дополнительной передачи.
Механизм рулевого управления предназначен для широкого диапазона транспортных средств с различными типами систем рулевого управления с гидравлическим или механическим усилением. Отпадает необходимость в датчиках угла поворота рулевого колеса или датчиках, используемых для определения факта, управляет ли водитель транспортным средством в ручном режиме или нет. Сигнал о положении рулевого колеса, передаваемый кодером, обеспечивает контролируемую обратную связь по углу поворота без необходимости дополнительных датчиков и находит применение в алгоритмах управления для улучшения рабочих характеристик, надежности и устойчивости транспортного средства. В другом варианте выполнения сигналы, компенсирующие неровности рельефа, передаются на процессор для дополнительного улучшения рабочих характеристик рулевого управления. Дальнейшее усовершенствование предполагает установку электронного блока системы рулевого управления с кодером непосредственно на двигатель, что обеспечит простоту подключения системы к жгуту проводов локальной сети контроллера (CAN) с минимальным количеством аппаратных средств.
Эти и другие цели, признаки и преимущества настоящего изобретения следуют из приведенного ниже подробного описания со ссылками на прилагаемые чертежи.
Краткое описание чертежей
На чертежах изображено:
фиг.1 - механизм управления для преобразования стандартной ручной системы управления в автоматическую;
фиг.2 - механизм ручного управления и монтажный узел на виде сбоку;
фиг.3 - механизм ручного управления согласно фиг.2 в разнесенной изометрической проекции;
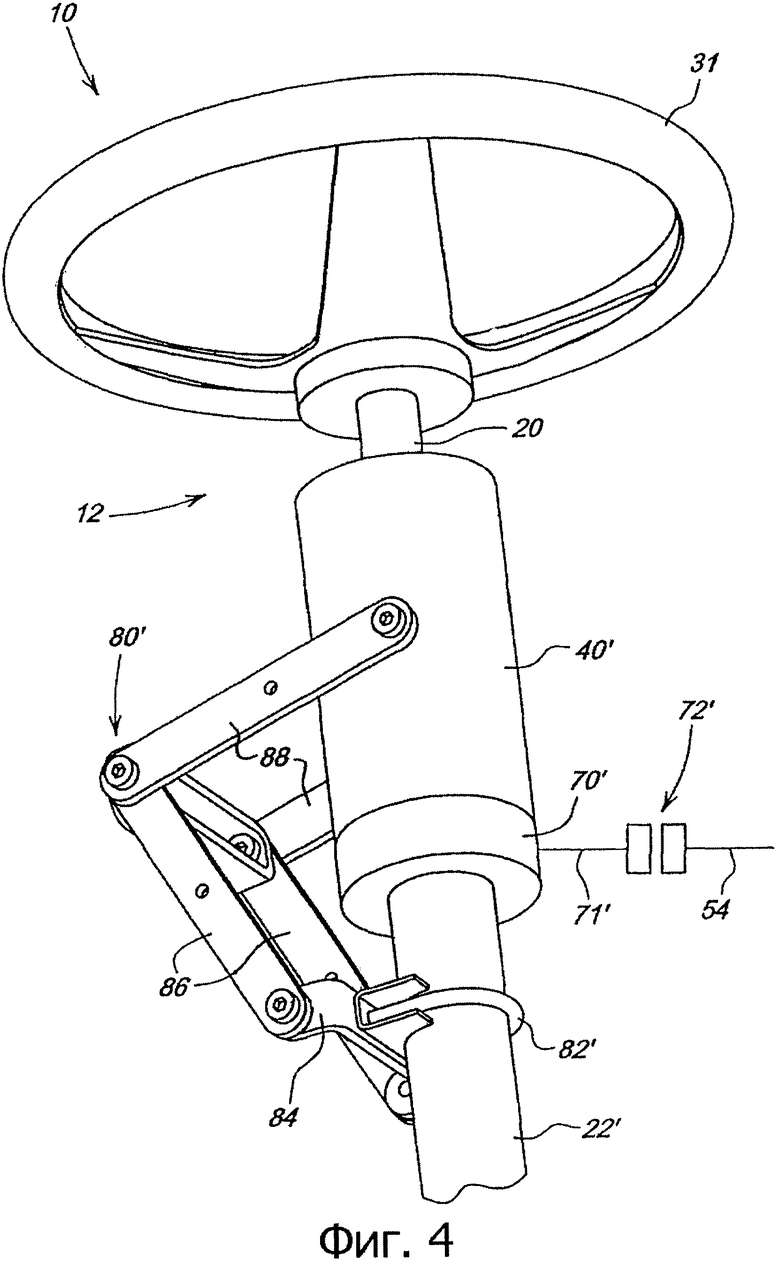
фиг.4 - предпочтительный вариант выполнения, в котором двигатель рулевого управления соединен непосредственно с рулевым валом, в изометрической проекции на виде сбоку.
Осуществление изобретения
На фиг.1 показано внедорожное транспортное средство 10, такое как трактор, или многоцелевое транспортное средство, имеющее рабочее место 12 водителя и перемещающееся по поверхности посредством управляемых колес 14. Колеса 14 соединены с обычным механизмом 16 рулевого управления, включающим поворотный рулевой вал 20, заключенный внутри рулевой колонки 22, которая своим верхним концом выступает на рабочем месте 12 водителя. Рулевое колесо 30 с ободом 31 закреплено на верхнем конце вала 20 для управления водителем.
Как показано на фиг.1, рулевое колесо 30 является частью устройства преобразования, обозначенного в целом позицией 32, для обеспечения функции автоматического управления на транспортном средстве, обычно оснащенном только ручным рулевым управлением. В качестве альтернативного решения первоначальное рулевое колесо транспортного средства может быть установлено на устройстве 32 преобразования. Шкив 34 установлен с возможностью вращения совместно с валом 20 вокруг оси вала, вблизи от места соединения рулевого колеса 30 с валом 20. Электродвигатель 40 опирается на колонку 22. Шкив 44 обеспечивает приводное соединение электродвигателя 40 со шкивом 34. Как показано на фигурах, шкивы 34 и 44 являются шкивами, соединенными с помощью цепной, обычной ременной или зубчатой ременной системы 46. Однако можно использовать также другие виды привода, такие как зубчатый привод. Кроме того, как показано в варианте выполнения на фиг.4, электродвигатель 40' может быть установлен на конце рулевого вала 20 для обеспечения прямого привода вала 20 в месте, сдвинутом от обода 31 рулевого колеса.
На транспортном средстве 10 установлен мобильный процессор 50, который имеет управляющий выход 52, связанный через жгут проводов локальной сети 54 контроллеров CAN с входным контактом 56 электродвигателя 40. Выход 58 обратной связи положения рулевого колеса двигателя 40 подключен к входу процессора 50. Как показано, электродвигатель 40 является шаговым электродвигателем, а устройство обратной связи - кодером, установленным на двигателе 40 и обеспечивающим сигнал по линии обратной связи 58, указывающий число шагов перемещения электродвигателя 40. Двигатель 40 остается соединенным с возможностью передачи приводного усилия с рулевым валом 20 как в режиме ручного управления, так и в режиме автоматического управления, так что кодер способен посылать в процессор 50 сигнал о положении вала в обоих режимах.
Процессор 50 соединен с датчиком положения, обозначенным в целом позицией 60 на фиг. 1, таким как обычная глобальная система определения местоположения (GPS) с приемником 61, принимающим сигналы с одного или более удаленных мест. Дополнительные входные сигналы коррекции, такие как входной сигнал RTK дифференциальной коррекции в зависимости от профиля поверхности, могут обеспечиваться радиоустройством RTK 63, а входной сигнал, обеспечивающий компенсацию неровностей рельефа, может обеспечиваться модулем 65 компенсации неровностей рельефа (ТСМ). Модуль 65 обеспечивает коррекцию данных GPS для угла бокового наклона и рыскания в процессе движения транспортного средства 10 по неровной местности.
Система 60 соединена через локальную сеть 54 контроллеров с входом процессора 50. Блок 70 системы рулевого управления (SSU) соединен со жгутом проводов сети 54 контроллеров через жгут 71 проводов локальной сети контроллеров CAN и разъем 72. Блок 70 системы рулевого управления принимает управляющую информацию из мобильного процессора 50, а информацию обратной связи по местоположению - из кодера на двигателе 40 через линию 58. Переключатель 78 включения и выключения и обратно соединен с блоком 70 системы рулевого управления.
Процессор 50 определяет положение транспортного средства и сравнивает его с расчетным положением и намеченным маршрутом движения транспортного средства. Создается сигнал ошибки и запускается электродвигатель 40 для выполнения заданного количества шагов в зависимости от сигнала ошибки. Датчики, такие как датчик определения скорости относительно земли и боковой скорости, обеспечивают сигналы, используемые в процессоре 50 для повышения точности системы автоматического рулевого управления.
Если число шагов, переданных кодером электродвигателя в процессор 50, находится вне диапазона, ожидаемого процессором, то система расценивает это как намерение водителя взять управление в свои руки и отключает питание шагового электродвигателя 40. Прерывание подачи тока в двигатель 40 происходит и в том случае, когда кодер фиксирует движение рулевого колеса при отсутствии команды на перемену положения со стороны процессора.
Переходной кронштейн 80 (80' на фиг.4) предназначен для соединения электродвигателя 40 с рулевой колонкой 22 или для установки двигателя в любое другое удобное положение вблизи от верхнего конца рулевого вала 20. Кронштейн 80 состоит из U-образного хомута 82, закрепленного на рулевой колонке 22 и имеющего рычажную опору 84, соединенную с возможностью поворота с концами пары рычагов 86. Вторая пара рычагов 88 соединена с возможностью поворота с противоположными концами рычагов 86 и поддерживает держатель 90 электродвигателя. Шаговый двигатель 40 закреплен на держателе 90 болтами и включает приводной вал посредством вала 94, на котором расположен шкив 44. Шкив 34 опирается с возможностью вращения на держатель 90 посредством втулки и узла 100 подшипника, закрепленных болтами 104 и пружинным стопорным кольцом 106. Сменная втулка 110 зафиксирована в узле 100 подшипника и вращается вместе с верхним концом вала 20 и шкивом 34. Втулка 110 имеет внутренний профиль 112, выполненный с возможностью размещения на шлицевом или шпоночном конце рулевого вала 20 для конкретного транспортного средства, переоснащенного под автоматическое рулевое управление. Крышка 118 закреплена на держателе 90 и в целом закрывает шкивы 34 и 44. Место установки системы 32 определяется выбором местоположения хомута 82 и поворотом рычагов 86 и 88. После правильного расположения системы 32 с втулкой 110 поверх рулевого вала 20 можно прикреплять рычажную передачу 80 к неподвижной поверхности для предотвращения поворота узла электродвигателя.
В варианте выполнения, показанном на фиг.4, рулевой вал 20 выступает через электродвигатель 40'. Вращательный электропривод может содержать сменную втулку, в основном аналогичную втулке 110, показанной на фиг.3, и предназначенную для различных конфигураций вала. Можно использовать электродвигатели 40' различных типов и конфигураций, включая более плоские, компактные в осевом направлении электродвигатели. Как показано на фиг.4, блок 70' системы рулевого управления SSU может быть встроен непосредственно в электродвигатель, при этом кодер и жгут проводов 71' сети контроллеров соединены в точке 72' со жгутом проводов сети контроллеров CAN, что позволяет свести к минимуму количество аппаратных средств, необходимых для преобразования.
На основе описания предпочтительного варианта выполнения становится очевидным, что возможны различные модификации без выхода из объема изобретения, определяемого прилагаемой формулой изобретения.


Изобретения относятся к системам автоматического рулевого управления транспортными средствами, в частности к вариантам выполнения систем рулевого управления и к преобразовательному устройству для перевода внедорожного транспортного средства из рулевого управления в автоматический режим. Система, по первому варианту, содержит входное устройство ручного управления для перемещения водителем управляемых колес в ручном режиме. Устройство включает обод рулевого колеса, соединенный с поворотным валом для перемещения с валом, электродвигатель, систему шкивов, соединенную с валом в месте, сдвинутом от обода, привод, соединяющий электродвигатель со шкивом, и процессор, соединенный с электродвигателем и реагирующий на сигнал включения электродвигателя для рулевого управления транспортным средством в автоматическом режиме. Система по второму варианту содержит узел для облегчения автоматического рулевого управления транспортным средством в автоматическом режиме рулевого управления. Узел содержит приводной электродвигатель рулевого управления, привод, соединяющий электродвигатель и рычажную передачу в месте. Приводной электродвигатель рулевого управления включает датчик положения входного устройства рулевого управления. Процессор реагирует на сигнал обратной связи угла рулевого управления и направляющий сигнал для рулевого управления транспортным средством. Преобразовательное устройство содержит приводной шкив, закрепленный на рулевом вале в месте, сдвинутом от рулевого колеса, для обеспечения поворота вместе с валом, электродвигатель, кронштейн для соединения с передачей приводного усилия приводного шкива с электродвигателем для перемещения электродвигателя вместе с рулевым валом. Достигается упрощение конструкции системы и ее установки. 3 н. и 19 з.п. ф-лы, 4 ил.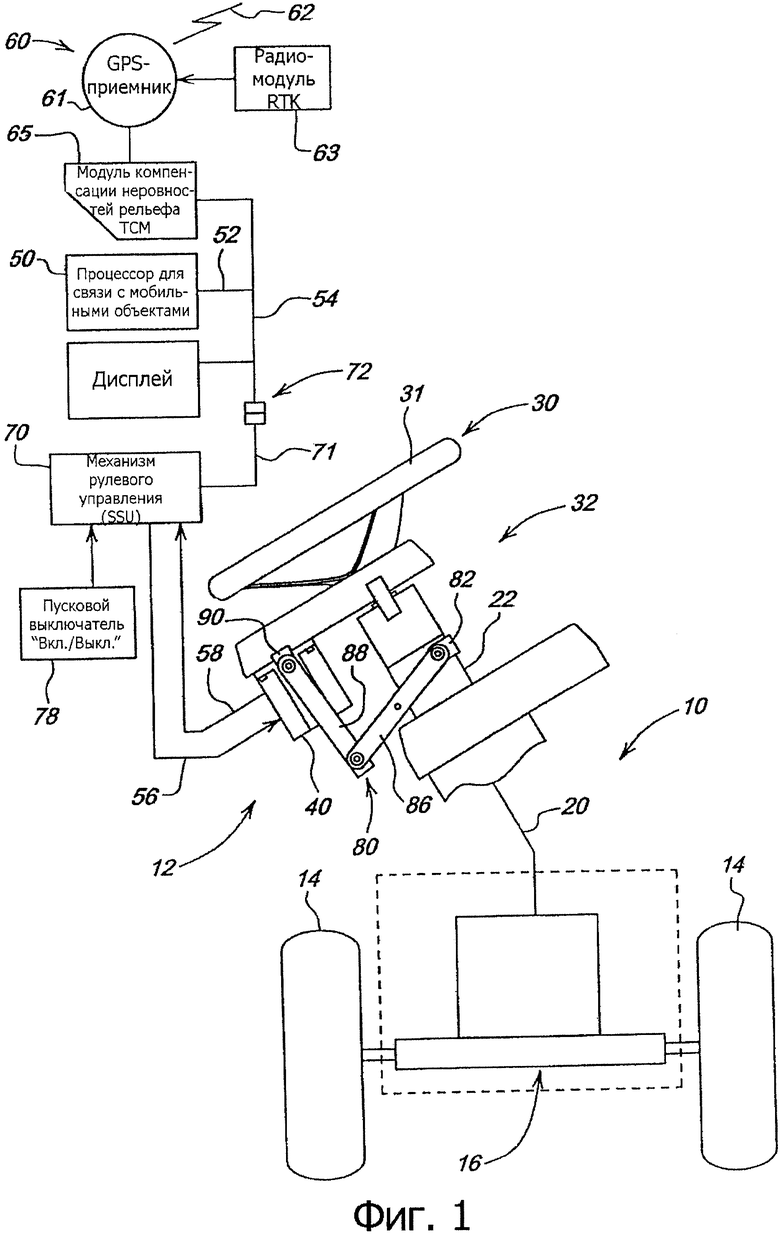
1. Система рулевого управления, имеющая ручной и автоматический режимы работы для избирательного управления управляемыми колесами внедорожного транспортного средства с использованием направляющего сигнала из места, удаленного от транспортного средства, содержащая входное устройство ручного управления для перемещения водителем управляемых колес в ручном режиме, включающее обод рулевого колеса, соединенный с поворотным валом для перемещения с валом как в ручном, так и в автоматическом режимах рулевого управления, электродвигатель, систему шкивов, соединенную с валом в месте, сдвинутом от обода, привод, соединяющий электродвигатель со шкивом, и процессор, соединенный с электродвигателем и реагирующий на сигнал включения электродвигателя для рулевого управления транспортным средством в автоматическом режиме.
2. Система управления по п.1, в которой процессор обеспечивает управляющий сигнал для электродвигателя в автоматическом режиме для поворота вала на заданную величину и процессор реагирует на отклонение между заданной величиной и действительным поворотом вала для изменения режима рулевого управления из автоматического режима в ручной режим.
3. Система управления по п.1, содержащая датчик обратной связи, соединенный с электродвигателем и реагирующий на поворот вала водителем в ручном режиме для обеспечения указания ручной коррекции в процессор в автоматическом режиме рулевого управления.
4. Система управления по п.3, в которой электродвигатель содержит шаговый электродвигатель, а датчик обратной связи - кодер вала на электродвигателе.
5. Система управления по п.1, в которой ручное управления содержит рулевое колесо, закрепленное на валу.
6. Система управления по п.1, в которой электродвигатель, система шкивов и привод опираются на выполненный с возможностью выборочного прикрепления съемный кронштейн рулевой колонки.
7. Система управления по п.6, в которой обод рулевого колеса установлен с возможностью поворота на съемном кронштейне рулевой колонки.
8. Система управления по п.1, в которой система шкивов содержит втулку, при этом втулка выполнена с возможностью замены для установки системы шкивов на поворотных валах различных конфигураций.
9. Система управления по п.1, в которой система шкивов содержит ременный привод или цепной привод.
10. Преобразовательное устройство для перевода внедорожного транспортного средства из ручного режима рулевого управления в автоматический режим рулевого управления, при этом транспортное средство имеет рулевую колонку с рулевым колесом, опирающимся на поворотный рулевой вал, причем преобразовательное устройство содержит приводной шкив, закрепленный на рулевом валу в месте, сдвинутом от рулевого колеса, для обеспечения поворота вместе с валом, электродвигатель, кронштейн для соединения с передачей приводного усилия приводного шкива с электродвигателем для перемещения электродвигателя вместе с рулевым валом как в автоматическом режиме рулевого управления, так и в ручном режиме рулевого управления, процессор, соединенный с электродвигателем и реагирующий на направляющий сигнал из места, удаленного от транспортного средства, для рулевого управления транспортным средством в автоматическом режиме.
11. Устройство по п.10, в котором на кронштейне установлено вспомогательное рулевое колесо, при этом вспомогательное рулевое колесо заменяет указанное первым рулевое колесо, когда присоединен приводной шкив.
12. Устройство по п.11, в котором приводной шкив опирается на кронштейн с возможностью поворота вместе со вспомогательным рулевым колесом.
13. Устройство по п.10, в котором рулевой вал имеет самый верхний конец, соединенный с рулевым колесом, и в котором приводной шкив соединен с самым верхним концом для облегчения установки преобразовательного устройства.
14. Система рулевого управления, имеющая ручной режим рулевого управления работы для управления управляемыми колесами внедорожного транспортного средства или автоматический режим рулевого управления с использованием направляющего сигнала из места, удаленного от транспортного средства, при этом внедорожное транспортное средство содержит входное устройство ручного управления, соединенное с рычажной передачей для перемещения водителем управляемых колес в ручном режиме, при этом входное устройство ручного рулевого управления включает обод рулевого колеса, соединенный с поворотным валом для перемещения с рычажной передачей в автоматическом режиме рулевого управления, узел для облегчения автоматического рулевого управления транспортным средством в автоматическом режиме рулевого управления, при этом узел содержит приводной электродвигатель рулевого управления, привод, соединяющий электродвигатель и рычажную передачу в месте, сдвинутом от обода рулевого колеса, процессор, соединенный с электродвигателем для включения электродвигателя с целью перемещения обода и рулевого управления транспортным средством в автоматическом режиме управления на сигнал включения электродвигателя для рулевого управления транспортным средством в автоматическом режиме рулевого управления, при этом приводной электродвигатель рулевого управления включает датчик положения входного устройства рулевого управления, обеспечивающий сигнал обратной связи угла рулевого управления для процессора, причем процессор реагирует на сигнал обратной связи угла рулевого управления и направляющий сигнал для рулевого управления транспортным средством.
15. Система управления по п.14, дополнительно содержащая соединенный с процессором механизм кинематики в реальном масштабе времени, при этом механизм кинематики в реальном масштабе времени создает сигнал, а процессор реагирует на указанный сигнал для управления транспортным средством в автоматическом режиме рулевого управления.
16. Система управления по п.14, дополнительно содержащая датчик компенсации неровностей рельефа, соединенный с процессором и генерирующий сигнал, указывающий рельеф местности, по которой перемещается транспортное средство, при этом процессор реагирует на сигнал для управления транспортным средством в автоматическом режиме рулевого управления.
17. Система управления по п.14, в которой узел выполнен с возможностью установки поверх части рычажной передачи с приводной связью с рычажной передачей.
18. Система управления по п.17, в которой узел содержит заменяющее рулевое колесо, соединенное со шкивом, и электродвигатель, выполненный в виде шагового двигателя, установленного вблизи шкива с приводной связью со шкивом как в ручном, так и автоматическом режимах рулевого управления.
19. Система управления по п.17, в которой рычажная передача содержит поворотный рулевой вал, имеющий верхний конец, соединенный с ободом рулевого колеса, при этом привод выполнен с возможностью соединения с самым верхним концом для облегчения крепления узла к рычажной передаче.
20. Система управления по п.19, в которой электродвигатель установлен непосредственно на рулевом валу.
21. Система управления по п.14, в которой процессор соединен с глобальной системой определения местоположения.
22. Система управления по п.14, в которой датчик положения входного устройства рулевого управления, создающий сигнал обратной связи угла поворота рулевого управления, расположен в электродвигателе, а блок системы рулевого управления расположен в электродвигателе и соединен со жгутом проводов локальной сети контроллера транспортного средства.
| DE 2925156 B1, 25.09.1980 | |||
| US 6397569 B1, 04.06.2002 | |||
| Способ автоматического вождения колесного транспортного средства | 1985 |
|
SU1273287A1 |
| ПЕРЕКЛЮЧАТЕЛЬ СТУПЕНЕЙ ТРАНСМИССИИ | 1996 |
|
RU2130664C1 |

