Изобретение относится к автоматическому вождению колесного транспортного средства, двигающегося в составе колонны за головным транспортным средством.
Цель изобретения - повышение точности следования последующего транспортного средства по траектории головного транспортного средства,
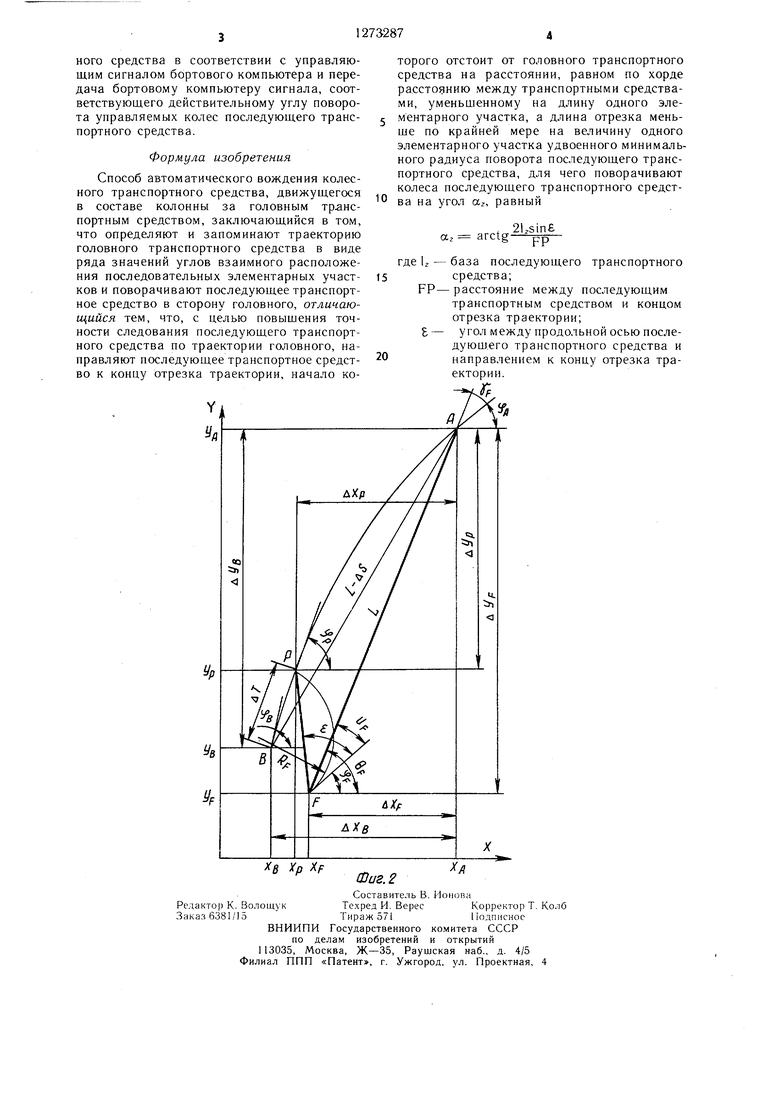
На фиг. 1 схематически показаны головное и последующее транспортные средства с размещенными на них устройствами; на фиг. 2 - положение головного (А) и последующего (F) транспортных средств в неподвижной системе координат.
Способ автоматического вождения колесного транспортного средства заключается в том., что определяют и запоминают траекторию головного 1 транспортного средства 3 виде ряда значений углов взаимного расположения последовательных элементарных участков, определяют расстояние между транспортными средствамии направляют последующее 2 транспортное средство к концу отрезка траектории головного транспортного средства, причем начало отрезка траектории отстоит от головного транспортного средства на расстоянии, по хорде равном расстоянию между транспортными средствами, уменьшенному на длину одного элементарного участка траектории, а длину отрезка по крайней мере на величину одного элементарного участка берут меньше удвоенного минимального радиуса поворота последующего транспортного средства, т.е.:
О AT - AS,
где л 5 -длина элементарного участка траектории;
Rmin -минимальный радиус поворота последующего транспортного средства;
AT - длина отрезка траектории.
Расчеты показали, что оптимальная величина дТомт, обеспечивающая наименьшее отклонение последующего транспортного средства от траектории головного, может быть определена из следующего выражения:
ДТопт (о,464- 1,) Rmin. Это выражение справедливо для
AS 0,1L;
R«,,-n 0,366L,
где L - расстояние между транспортными
средствами.
Для управления по предлагаемому способу головное транспортное средство 1 оборудовано приемопередающим устройством 3, передающим показания датчика 4 угла а поворота управляемых колес, показания датчика 5 пути S, проходимого головным транспортным средством, и значение угла ур между продольной осью головного транспортного средства и направлением на последующее 2 транспортное средство, которое определяется устройством 6. Последующее транспортное средство оборудовано приемопередающим устройством 3, датчиком 4 угла а поворота колес последующего транспортного средства, устройством 6 для определения
угла Up между продольной осью последующего транспортного средства 2 и направлением на головное 1 транспортное средство Up, устройством 7 для определения расстояния L до головного 1 транспортного средства, и устройством 8 для управления ко0 лесами последующего транспортного средства (фиг. 1).
По предлагаемому способу, в частности, может управляться сочлененное транспортное средство, состоящее из двух тележек с управляемыми колесами, связанных рамой.
Устройство 8 состоит из бортового компьютера и следящего привода 3 поворота управляемых колес последующего транспортного средства. Бортовой компьютер может быть выполнен на основе существующих миниЭВМ.
0 В функции бортового компьютера на основе заданных величин AS и AT входит определение и запоминание траектории головного транспортного средства в виде последовательного ряда величин УД.ХА,, УА{.; определение положения последующего транспортного средства относительно головного: L;cos (УА,-З-р,);
Уг( УА, - L/ sin (ФА, - ), CpF, ФА; - Tfi -f Up;
0 определение на траектории головного транспортного положения PI при соблюдении условий:
А;В; Li - AS,
В,-Р,- AT;
определение расстояния от последующего транспортного средства до Р,:
F;P; Y(x,-Хр,) + (УК,- У pi);
определение угла между продольной осью последующего транспортного средства и направлением на Р,:
6, фР,-агс1 1: -1 -;
,
определение требуемого угла поворота оСе 45 управляемых колес последующего транспортного средства:
а. arctgIk iHl , F,-P,
где 1г - база последующего транспортного
средства;
сравнение полученного значения otj с сигналом, поступающим от следящего привода 9, и выработка управляющего сигнала на следящий привод 9.
В функции привода 9 входит поворот управляемых колес последующего транспорт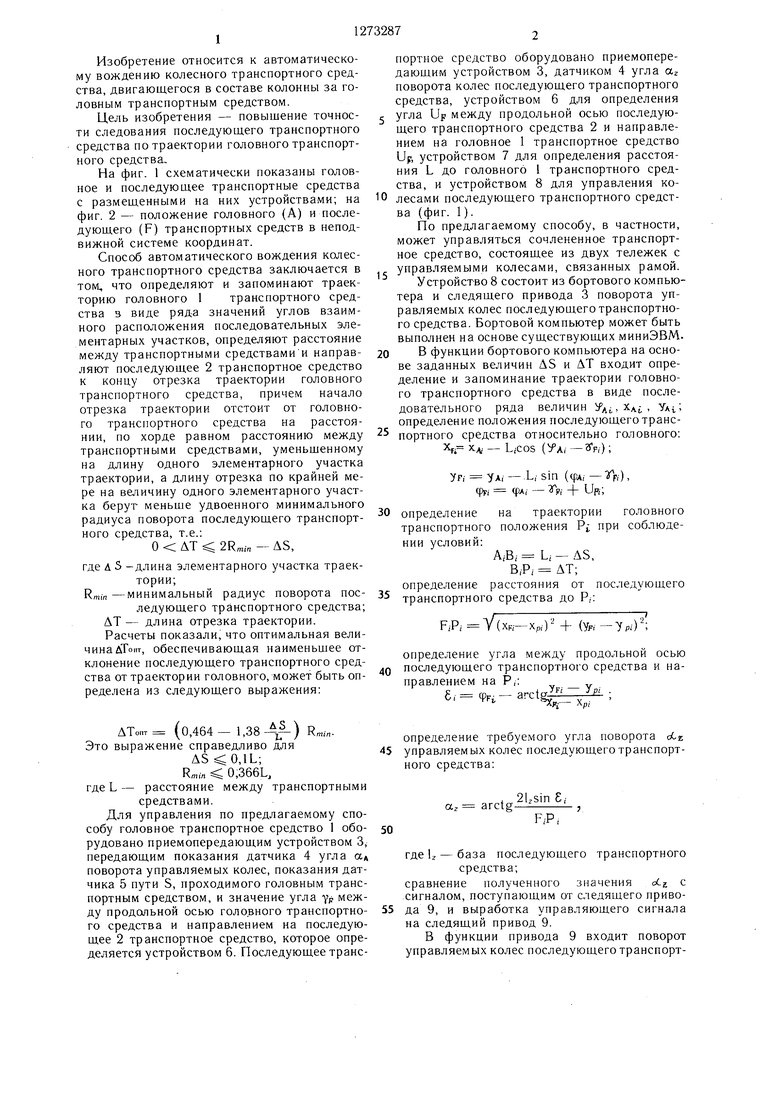
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления задними колесами транспортного средства | 1989 |
|
SU1625756A1 |
| Устройство для управления транспорт-НыМ СРЕдСТВОМ | 1978 |
|
SU809076A1 |
| Способ управления движением автомобильной техники в составе колонны с учетом состояния опорной поверхности, рельефа и кривизны маршрута | 2022 |
|
RU2790889C1 |
| Устройство рулевого управления транспортного средства | 1977 |
|
SU734049A1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| СПОСОБ ИМИТАЦИИ ТРАЕКТОРИЙ ДВИЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2009 |
|
RU2419072C2 |
| Универсальный способ фотофиксации нарушений ПДД | 2019 |
|
RU2749941C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ АНТЕННЫХ ХАРАКТЕРИСТИК НА ИЗМЕРИТЕЛЬНОЙ ПЛОЩАДКЕ | 2023 |
|
RU2804836C1 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ, ПОЛОЖЕНИЕМ В ПРОСТРАНСТВЕ И НАПРАВЛЕНИЕМ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, РЕАЛИЗУЮЩЕГО СХЕМУ БОРТОВОГО ПОВОРОТА И СНАБЖЕНННОГО НЕЗАВИСИМЫМИ ЭЛЕКТРОПРИВОДАМИ КОЛЕС | 2012 |
|
RU2517284C2 |
| Способ управления транспортным средством | 1976 |
|
SU582130A1 |
Изобретение относится к снособам управления колесами транспортного средства. Цель изобретения - новып1ение точности следования последующего транспортного средства по траектории головного. Способ управления колесами последующего транспортного средства 2 (ПТС), движущегося в составе колонны за головным транспортным средством I (ГТС), заключается в том, что определяют и запоминают траекторию ГТС в виде ряда значений углов взаимного расположения последовательных элементарных участков, поворачивают ПТС в сторону траектории ГТС, при этом ПТС направляют к концу отрезка траектории, начало которого отстоит от ГТС на расстоянии, равном, по хорде расстоянию между транспортными средствами, уменьщенному на длину одного элементарного участка, а длина отрезка меньще по крайней мере на величину одного эле.ментарного участка удвоенного мини.мального радиуса поворота (Л ПТС. 2 ил. } ьо со N3 00 
| Способ управления транспортным средством | 1976 |
|
SU582130A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
