Настоящее изобретение относится к способу обеспечения работы системы трансмиссии автотранспортного средства с четырьмя ведущими колесами и способу управления механическим средством соединения первой оси со второй осью системы трансмиссии автотранспортного средства с четырьмя ведущими колесами. Объектом изобретения является также система управления состоянием механического средства соединения. Изобретение относится также к системе трансмиссии, содержащей такую систему управления. Объектом изобретения является также транспортное средство, содержащее такую систему управления и такую систему трансмиссии.
Изобретение находит свое применение для транспортного средства, оборудованного системой трансмиссии с четырьмя управляемыми ведущими колесами. Задачей, которая ставится перед транспортным средством этого типа, является улучшение характеристик, таких как поведение и приемистость, в частности, при трогании с места, то есть во время начала движения транспортного средства и преодоления препятствий.
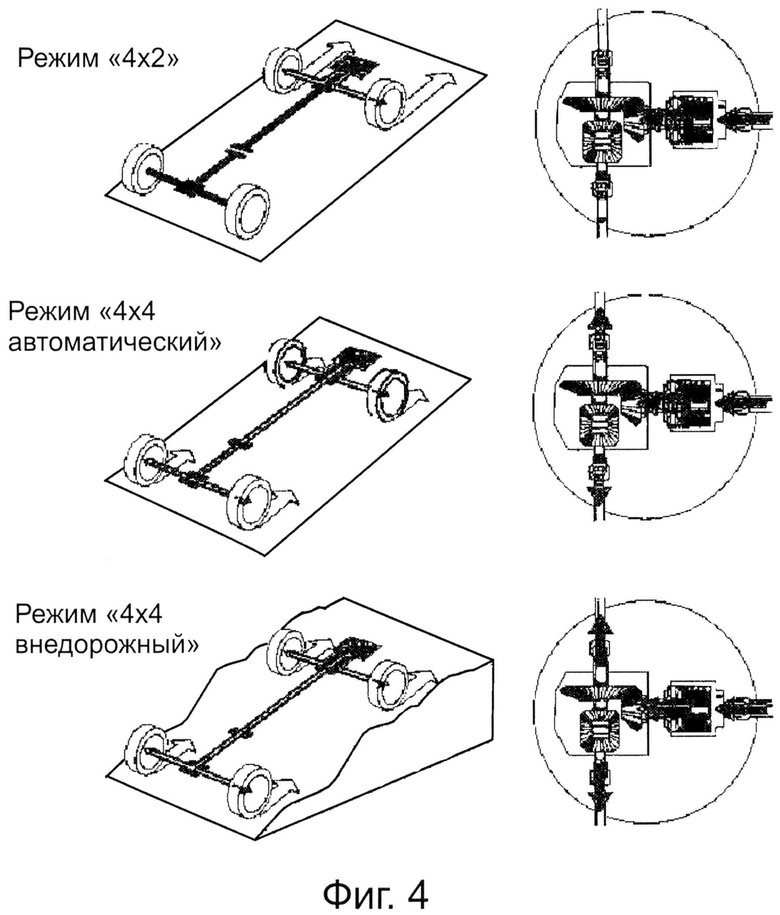
Известна система трансмиссии с четырьмя ведущими колесами, в которой механическое средство соединения с электромагнитным приводом (муфта) передней оси с задней осью может работать в трех состояниях, определяющих три режима работы системы трансмиссии, как показано на фиг.4:
- первый режим трансмиссии, когда только часть (переменная) максимальной мощности крутящего момента, поступающая от источника момента (двигателя автотранспортного средства) и предназначенная для заднего моста, действительно передается на задний мост; этот первый режим, называемый режимом «4×4 автоматический», соответствует так называемой «управляемой» муфте, то есть система управления муфтой автоматически управляет ее работой, в частности, величиной переданного или передаваемого крутящего момента,
- второй режим трансмиссии, когда вся максимальная мощность крутящего момента, поступающая от источника момента и предназначенная для заднего моста, действительно передается на задний мост; этот второй режим, называемый «4×4 внедорожный», соответствует так называемой «замкнутой» муфте, то есть она блокируется в состоянии, определяющем фиксированное значение передаваемого максимального крутящего момента, при этом блокировка предпочтительно является электрической,
- третий режим трансмиссии, когда на задний мост не передается (или передается лишь в незначительной степени) крутящий момент от источника момента; этот третий режим, называемый «4×2», соответствует так называемой «разомкнутой» муфте, то есть муфта деактивирована или передает только крутящий момент ничтожной величины.
Средство соединения, позволяющее распределить продольные усилия на четыре колеса, имеет максимальную мощность трансмиссии.
Из документа JP 61 275028 известна стратегия, которая компенсирует разницу в радиусе колес на уровне вычисления переднего-заднего буксования, если обнаруживается разность радиуса качения.
Из документа US 575221 1 известна стратегия, позволяющая улучшить расход топлива за счет вычисления отклонения, которое является кубической функцией скорости и которое вычитают из классической команды распределения крутящего момента. Таким образом, во время квазистатических фаз качения буксование улучшается.
Из документа ЕР 1 188 597 А7 известна адаптация стратегии распределения крутящего момента между передним и задним мостами в зависимости от обнаружения изменения диаметра шин, связанного с износом или с заменой.
Из документа ЕР 1 275 549 А2 известна стратегия распределения крутящего момента между передним и задним мостами в зависимости от различных сигналов, таких как скорости колес, режим двигателя и положение педали акселератора.
Из документа JP 10119598 известно транспортное средство с четырьмя ведущими колесами, в котором двумя главными ведущими колесами являются задние колеса (задний привод). Когда задние колеса начинают пробуксовывать, система контроля тягового усилия уменьшает движущую мощность, прикладываемую к этим задним колесам, после чего увеличивает движущую мощность на передних колесах (вспомогательные ведущие колеса) при помощи системы контроля распределения крутящего момента.
Из документа JP 2004338456 известна усовершенствованная стратегия компенсации буксования.
Из документа US 63971 39 известна стратегия, позволяющая улучшить передачу крутящего момента путем сравнения буксования (вычисленного за данный период) с таблицей заранее определенных значений (функции скорости транспортного средства). Если большое число выборочных значений слишком разнится со значением из таблицы, производят коррекцию буксования.
Изобретение призвано предложить способ управления механическим средством соединения осей, позволяющий решить вышеупомянутые проблемы и усовершенствующий известные способы управления. В частности, изобретением предлагается способ управления механическим средством соединения, позволяющий улучшить характеристики приемистости и трогания с места (начало движения) автотранспортного средства с четырьмя ведущими колесами.
Способ в соответствии с изобретением управляет механическим средством соединения первой и второй осей системы трансмиссии автотранспортного средства. Первая ось приводится во вращение по умолчанию, а вторая ось приводится во вращение факультативно в зависимости от состояния средства соединения. Способ содержит этап регулирования, в частности, типа пропорционально-интегрального регулирования буксования между первой и второй осью, при этом регулирование осуществляют посредством подачи команды на изменение значения механического момента, передаваемого муфтой.
Буксование можно вычислять непрерывно, при этом можно определить заданное значение буксования и использовать разность между вычисленным буксованием и заданным значением буксования для вычисления значения передаваемого момента.
Можно использовать, по меньшей мере, один из следующих сигналов, для определения заданного значения буксования:
- сигнал запуска двигателя,
- сигнал радиуса поворота или угла рулевого колеса или бокового ускорения,
- сигнал отклонения радиусов колес,
- сигнал скорости вращения колес,
- сигнал скорости транспортного средства,
- сигнал режима двигателя,
- сигнал крутящего момента двигателя,
- сигнал положения педали акселератора,
- сигнал положения средства управления выбором режима трансмиссии,
- сигнал уровня момента, прикладываемого к муфте,
- сигнал теплового состояния муфты,
- логический сигнал активации педали тормоза или рычага стояночного тормоза,
- логический сигнал регулирования ABS, ASP.
Значение передаваемого момента можно переустановить на данное значение, в частности, на ноль, если:
- предыдущий передаваемый момент является нулевым, или
- транспортное средство находится в фазе торможения или ускорения, или
- система трансмиссии переходит или находится в режиме трансмиссии с двумя ведущими колесами.
Можно генерировать нижние и/или верхние пределы момента, передаваемого муфтой, и можно насытить сигнал управления моментом, передаваемым муфтой, этим пределом или этими пределами.
Можно записать в память значение постоянного буксования, измеренное или оцененное во время первой фазы качения транспортного средства, и использовать это значение буксования в другой фазе качения транспортного средства, следующей после первой фазы качения транспортного средства.
Способ в соответствии с изобретением управляет работой системы трансмиссии автотранспортного средства. Система содержит первую ось, приводимую во вращение по умолчанию, и вторую ось, вращаемую факультативно в зависимости от состояния механического средства соединения первой и второй осей. Способ содержит фазу применения описанного выше способа управления.
Объектом изобретения является также носитель для записи данных, считываемый вычислительным устройством, на котором записана компьютерная программа, содержащая программные коды для осуществления этапов вышеуказанного способа.
Согласно изобретению, система управляет состоянием механического средства соединения первой и второй осей системы трансмиссии автотранспортного средства, при этом первая ось приводится во вращение по умолчанию, а вторая ось приводится во вращение факультативно в зависимости от состояния средства соединения. Система управления содержит материальные и/или программные средства для применения описанного выше способа.
Автотранспортное средство в соответствии с изобретением содержит вышеуказанную систему управления.
Объектом изобретения является также компьютерная программа, содержащая программный код, предназначенный для реализации этапов вышеуказанного способа, когда программу исполняет компьютер.
Изобретение поясняется чертежами, на которых представлено следующее:
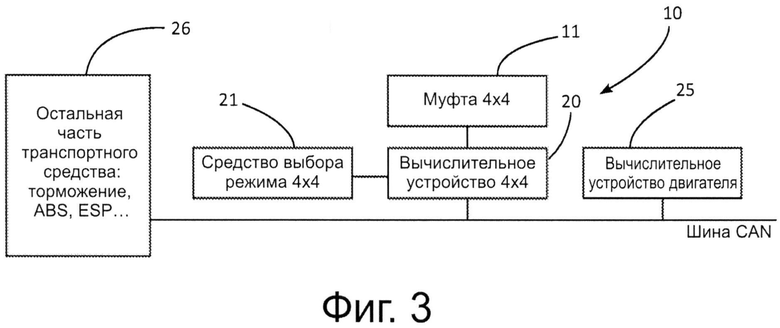
фиг.1 и 3 - схемы варианта выполнения автотранспортного средства, содержащего систему управления в соответствии с изобретением;
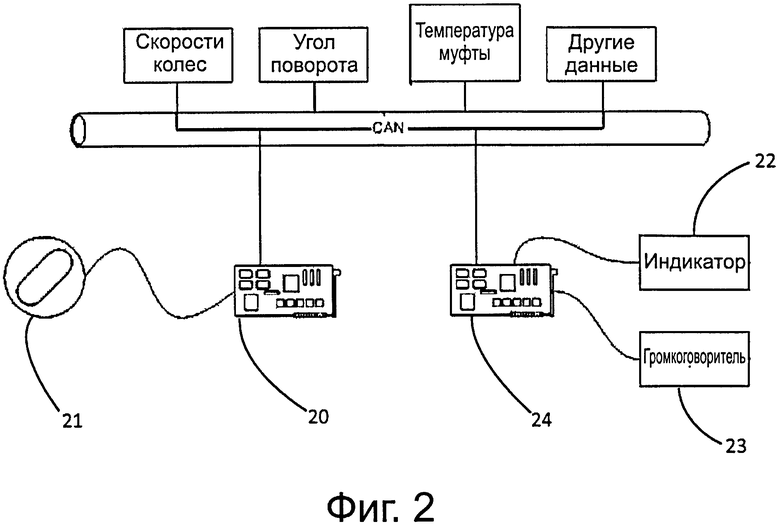
фиг.2 - схема электронной компоновки, управляющей работой системы управления в соответствии с изобретением и позволяющей осуществлять способ управления в соответствии с изобретением;
фиг.4 - различные режимы трансмиссии, в соответствии с которыми может работать система трансмиссии;
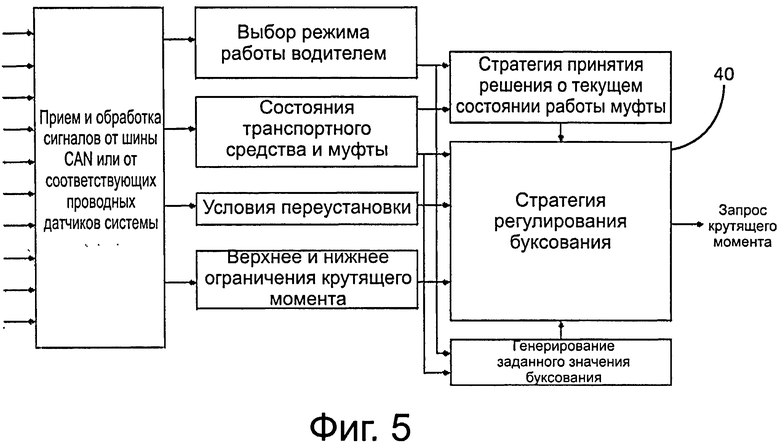
фиг.5 - схема программной структуры, управляющей работой системы управления в соответствии с изобретением и позволяющей осуществлять способ управления в соответствии с изобретением;
фиг.6 - схема варианта выполнения регулятора буксования системы управления в соответствии с изобретением;
фиг.7 - схема варианта выполнения первого модуля регулятора буксования;
фиг.8 - схема варианта выполнения второго модуля регулятора буксования;
фиг.9 - вариант выполнения логической схемы, позволяющей вычислять заданное значение буксования;
фиг.10 - вариант выполнения логической схемы, позволяющей вычислять скорости и буксование.
Способ управления муфтой в соответствии с изобретением позволяет оптимизировать характеристики транспортного средства, оборудованного управляемой системой «с 4 ведущими колесами» в зависимости от условий качения, от состояния транспортного средства и от намерения водителя.
Этот способ управления можно применять в общей системе, техническая компоновка которой содержит, по меньшей мере, один источник крутящего момента (двигатель), механическое средство соединения, позволяющее распределять усилия вращения на четыре колеса транспортного средства, и средства определения переменных состояния транспортного средства, например, такие как средства определения скорости вращения каждого колеса, средства определения данных, связанных с двигателем (положение педали акселератора, режим и крутящий момент двигателя…), и одно или несколько электронных или автоматических вычислительных средств.
Изобретение можно применять как для транспортного средства с «передним приводом», то есть в котором по умолчанию приводится во вращение передний мост, так и для транспортного средства с «задним приводом», то есть в котором по умолчанию приводится во вращение задний мост.
Буксование определяют как разность скорости вращения между передней и задней осями. Это буксование используют для оптимизации характеристик движения транспортного средства (в режиме «4×4 автоматический» или «4×4 внедорожный»). Для этого необходимо регулировать буксование между осями за счет наилучшего распределения крутящего момента, создаваемого двигателем. Техническая проблематика касается логики использования этого буксования.
Регулирование переднего-заднего буксования является важной задачей для транспортного средства, оборудованного управляемой системой «с 4 ведущими колесами». Действительно, это буксование, доведенное до уровня муфты, ограничивает крутящий момент, передаваемый на заднюю ось, с одной стороны, и, с другой стороны, может привести к перегреву и/или износу муфты в зависимости от уровня передаваемого момента (уровень замыкания муфты).
Способ управления позволяет наилучшим образом использовать возможности технологии управляемой муфты: непрерывно вычисляя оптимальное заданное значение буксования между осями и интегрируя различные оказывающие влияние параметры и переменные, можно управлять муфтой при помощи электронных средств.
В случае транспортного средства, оборудованного лишь небольшим числом датчиков, например, не содержащего температурного датчика и датчика момента на уровне муфты, приходиться прибегать к оценке и отслеживанию как к средству защиты муфты и оптимизации ее работы, а также работы системы трансмиссии. При этом способ управления в соответствии с изобретением учитывает имеющиеся данные: намерение водителя, условия качения, состояние муфты.
Согласно заявленному способу, при вычислении заданного значения буксования учитывают:
- скорость транспортного средства и/или
- постоянное буксование, связанное с разностью радиуса качения, и/или
- радиус поворота или угол рулевого колеса или поперечное ускорение, и/или
- температуру муфты, и/или
- режим трансмиссии, выбранный водителем, и/или
- действия водителя (ускорение, торможение…).
Если сравнить с изобретением по FR 09-51 101, то настоящее изобретение касается интегрирования компенсации постоянного буксования (связанного с разностью радиуса качения) и учета намерения и действий водителя.
Даже если рассматриваемый диапазон постоянного буксования и не влияет на износостойкость муфты, очень важно интегрировать его в различные стратегии контроля системы трансмиссии 4×4, чтобы оптимизировать ее характеристики (приемистость, поведение избыточной/недостаточной поворачиваемости и т.д.) как в режиме «4×4 автоматический», так и в режиме «4×4 внедорожный» (если передаваемый фиксированный предельный момент не достаточен для устранения буксования).
Вариант выполнения автотранспортного средства 10 в соответствии с изобретением, представленный на фиг.1 и 2, включает в себя вариант выполнения системы 18 трансмиссии с четырьмя ведущими колесами 14, 15 и, в частности, с четырьмя управляемыми ведущими колесами.
Система 18 трансмиссии в основном содержит первую колесную ось 17 автотранспортного средства, например, переднюю ось, вторую колесную ось 19 автотранспортного средства, например, заднюю ось, механическое средство 11 соединения (муфта), например, с электромагнитным приводом, первой и второй осей и систему управления состоянием механического средства соединения. Система управления содержит средство 21, в частности, кнопку управления выбором режима работы системы трансмиссии, и вычислительное устройство 20.
Система трансмиссии соединена с источником 13 крутящего момента, приводящим в движение автотранспортное средство (двигатель транспортного средства).
Хотя на фигурах это и не показано, следует учесть, что система трансмиссии содержит средство выбора пользователем (например, приборный щиток) режима работы системы, средство отслеживания, - на основании переменных состояния транспортного средства и/или системы трансмиссии, - намерения водителя и условий движения (ускорение, торможение, буксование…), средство управления для переключения муфты в определенный режим или состояние в зависимости от режима, выбранного водителем, от намерения водителя и от условий движения транспортного средства, средства определения переменных состояния транспортного средства, например, такие как средства определения скорости вращения каждого колеса, средства определения продольной скорости транспортного средства, средства определения скорости вращения выходного вала двигателя, средства определения температуры муфты, средства получения данных о состоянии различных агрегатов транспортного средства и электронные или автоматические вычислительные средства. Система трансмиссии содержит средство выбора пользователем (например, приборный щиток) режима работы системы, в частности, первого режима «4×4 автоматический», второго режима «4×4 внедорожный» или третьего режима «4×2», средство отслеживания, - на основании переменных состояния транспортного средства и/или системы, - намерения водителя и условий движения (ускорение, торможение, буксование…) и средство управления для переключения системы в определенный режим в зависимости от режима, выбранного водителем, от намерения водителя и от условий движения транспортного средства. Система трансмиссии, в частности, система управления механическим средством соединения содержит также память и все материальные и/или программные средства, позволяющие осуществлять способ в соответствии с изобретением. В частности, система и, конкретно, вычислительное устройство может содержать компьютерную программу, содержащую программный код, предназначенный для реализации этапов способа в соответствии с изобретением.
В системе трансмиссии первая ось (например, передняя ось, соответственно задняя ось) приводится во вращение по умолчанию от источника крутящего момента. С другой стороны, вторая ось (например, задняя ось, соответственно передняя ось) приводится во вращение только факультативно в зависимости от состояния муфты.
Таким образом, в зависимости от состояния муфты система трансмиссии имеет три следующих режима работы:
- первый режим трансмиссии, когда только часть (переменная) максимальной мощности крутящего момента, поступающая от источника момента и предназначенная для второй оси, действительно передается на вторую ось; этот первый режим, называемый режимом «4×4 автоматический», соответствует так называемой «управляемой» муфте, то есть система управления муфтой автоматически управляет ее работой, в частности, величиной переданного или передаваемого крутящего момента,
- второй режим трансмиссии, когда вся максимальная мощность крутящего момента, поступающая от источника момента и предназначенная для второй оси, действительно передается на вторую ось; этот второй режим, называемый «4×4 внедорожный», соответствует так называемой «замкнутой» муфте, то есть она блокируется в состоянии, определяющем фиксированное значение передаваемого максимального крутящего момента,
- третий режим трансмиссии, когда на задний мост не передается или передается лишь в незначительной степени крутящий момент от источника момента на вторую ось; этот третий режим, называемый «4×2», соответствует так называемой «разомкнутой» муфте, то есть муфта деактивирована или передает только крутящий момент ничтожной величины.
С точки зрения технологии муфта может быть фрикционной, то есть содержать фрикционные диски, предназначенные для вхождения в контакт друг с другом с целью передачи крутящего момента, и приводное средство для разъединения или для приведения этих дисков во взаимный контакт. Муфта может также работать с использованием свойств вязкой жидкости (вязкостная муфта), то есть содержит диски с лопатками, погруженными в жидкость, и приводное средство для раздвигания и сдвигания этих дисков. Как в том, так и в другом случае приводное средство управляется вычислительным устройством 20. Муфта может, в частности, представлять собой многодисковое устройство сцепления с управлением от тока.
Система трансмиссии может также содержать вычислительное устройство 24 и средства 22, 23, позволяющие передавать данные водителю, в частности, индикатор 22 и/или громкоговоритель 23.
Способ управления в соответствии с изобретением можно применять в рамках программной архитектуры, содержащей различные модули, показанные на фиг.5. Эту компоновку можно интегрировать в общую структуру управления транспортного средства 4×4. Она обеспечивает также исключительную гибкость при проектировании и определении параметров, так как может зависеть одновременно от разных условий качения (скорость транспортного средства, момент, передаваемый на дорожное покрытие, положение педали акселератора, действия по торможению…).
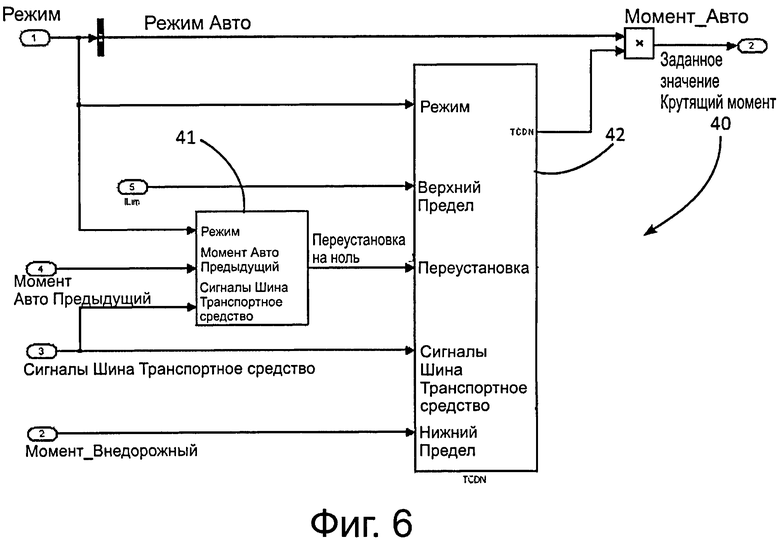
В варианте выполнения системы управления в соответствии с изобретением входящий в состав вычислительного устройства 20 модуль 40 (показан на фиг.6) позволяет определять значение момента, который необходимо передать на уровень муфты, и, следовательно, команду, передаваемую на муфту для достижения заданного значения буксования. Для этого на выходе модуля 40 генерируют выходной сигнал Те управления моментом, передаваемым муфтой.
В рамках способа управления обнаруженное и оцененное буксование сохраняют в памяти вычислительного устройства между двумя фазами качения, если не произошло размыкание муфты, и его можно использовать от одной фазы качения к другой. Для этого непрерывно вычисляют буксование (разность средних скоростей) между осями и сравнивают его с заданным значением буксования, которое, в свою очередь, корректируют в зависимости от различных параметров и переменных.
Сигналы, используемые на входе модуля 40, показанного на фиг.6, могут поступать от датчиков напрямую через проводную связь или от других вычислительных устройств через коммуникационную шину (например, типа CAN). Они могут содержать все или часть следующих сигналов:
- сигналы скоростей вращения колес,
- сигнал скорости транспортного средства,
- сигнал режима двигателя,
- сигнал крутящего момента двигателя,
- сигнал положения педали акселератора,
- сигнал «Режим» положения средства управления выбором режима трансмиссии,
- сигнал уровня момента, прикладываемого к муфте,
- сигнал теплового состояния муфты,
- логические сигналы активации педали тормоза или рычага стояночного тормоза,
- логические сигналы регулирования ABS, ASP…
Эти сигналы можно также подвергать оценке, фильтрации и/или предварительной обработке для повышения надежности способа.
Вариант осуществления способа управления включает в себя регулирование буксования при помощи управления передаваемым крутящим моментом. Например, вариант осуществления содержит все или часть следующих этапов:
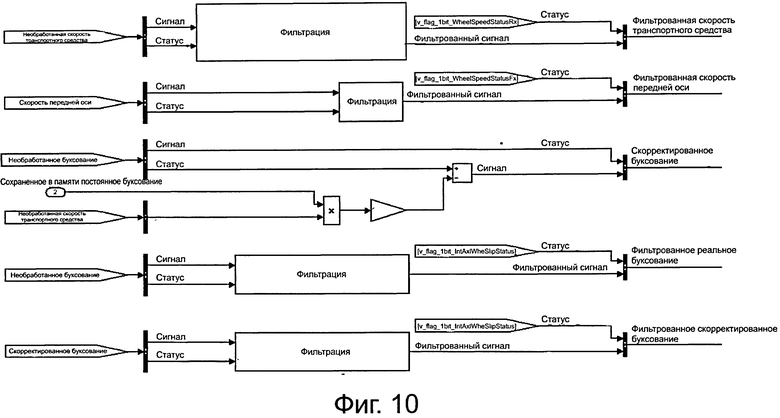
1. вычисление и фильтрация скоростей и буксований,
2. генерирование сигнала переустановки на ноль заданного значения момента, передаваемого муфтой, при этом условия переустановки на ноль включают в себя, в частности, условия качения,
3. обнаружение режима трансмиссии,
4. генерирование нижних и/или верхних пределов момента, передаваемого муфтой,
5. генерирование заданного значения буксования,
6. регулирование буксования.
На вышеуказанном этапе 1 вычисляют и фильтруют:
- скорости «Необработанная Скорость Транспортного средства» и «Скорость Передней Оси»
- буксования «Необработанное Буксование» и «Скорректированное Буксование». Сигнал «Сохраненное Постоянное Буксование» (сохраненное в памяти между
двумя последовательными задачами) используют для вычисления «Скорректированного Буксования» в зависимости от «Необработанной Скорости Транспортного средства».
Вариант выполнения такой логической схемы представлен на фиг.10.
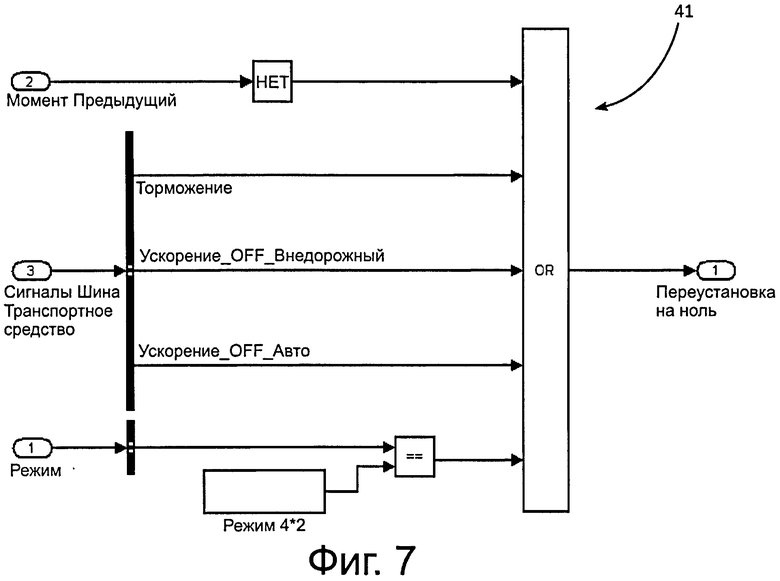
На этапе 2 генерируют сигнал заданного значения момента, передаваемого муфтой. Для этого устанавливают на ноль выходной сигнал, управляющий моментом, передаваемым муфтой, если:
- предыдущий передаваемый момент «Предыдущий Момент Авто» является нулевым, или
- транспортное средство находится в фазе торможения или ускорения (тест сигналов «Торможение» или «Ускорение_ОРР_Внедорожный» и «Ускорение_ОРР_Авто»), или
- система трансмиссии переходит или находится в режиме «4×2» (тест сигнала «Режим»).
Вариант выполнения логического блока 7, позволяющего осуществлять такой этап, представлен на фиг.7.
На этапе 3 отслеживают текущий режим трансмиссии. Так, проверяют выбранный режим трансмиссии 4×4 (4×4 автоматический или 4×4 внедорожный), проверяя при этом, не равен ли нулю сигнал «Режим-Авто». Такая логическая схема показана на фиг.6.
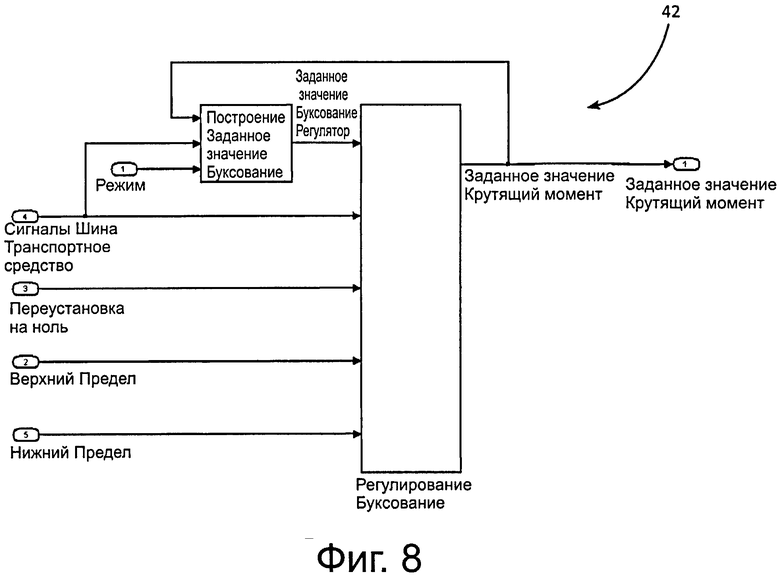
На этапе 4 генерируют сигналы (верхнего и нижнего) ограничения момента, передаваемого муфтой. Эту логическую схему ограничения применяют в логическом блоке 42, показанном на фиг.6 и 8. Согласно активному режиму трансмиссии (автоматическому или внедорожному), насыщают сигнал управления моментом, передаваемым муфтой («Верхний Предел» и «Нижний Предел»),
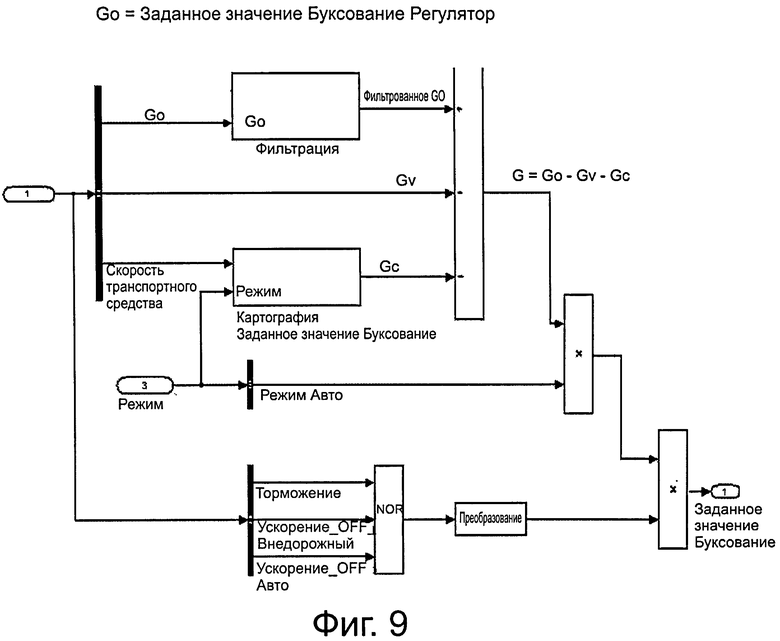
На этапе 5 генерируют сигнал заданного значения буксования. Вариант выполнения такой логической схемы показан на фиг.9. Заданное значение «Заданное Значение Буксования» равно:
- буксованию "GO" (или «Скорректированное Буксование» на фиг.10), измеренному и скорректированному с учетом постоянного буксования, происходящего по причине разности радиуса качения,
из которого вычитают:
- буксование "Gv", скорректированное буксованием, происходящим по причине разности радиуса качения,
- и буксование, полученное из двух картографий (по одной на каждый режим работы 4×4 «внедорожный» и «автоматический») в зависимости от скорости транспортного средства.
Заданное значение буксования можно также адаптировать в зависимости от температуры муфты.
На этапе 6 регулируют буксование при помощи сигнала управления моментом, передаваемым муфтой. Регулятор может представлять собой структуру пропорционально-интегрального типа с параметрируемыми пропорциональным Кр и интегральным Ki коэффициентами усиления. В этом случае интегральное действие регулятора и, следовательно, выход, генерирующий командный сигнал, можно насытить вышеупомянутыми сигналами (верхнего и нижнего) ограничения момента, передаваемого муфтой.
Таким образом, способ управления в соответствии с изобретением позволяет:
- с одной стороны, оптимизировать вычисление заданного значения буксования с целью регулирования,
- с другой стороны, защитить муфту в случае неконтролируемого буксования (постоянное буксование, проскальзывание…).
Таким образом, способ управления позволяет оптимизировать характеристики (приемистость), а также увеличить срок службы муфты и, следовательно, повысить ее надежность и обеспечить общую безопасность транспортного средства. Действительно, заданное значение буксования будет оптимизированным при любой ситуации вождения.
Способ управления имеет также следующие преимущества:
- он содержит стратегию фильтрации заданного значения, которая обеспечивает дополнительную степень свободы при доводке динамики автоматического регулирования, не снижая при этом надежности, так как позволяет избежать усиления при замкнутой цепи обратной связи,
- он обеспечивает защиту привода в случае ненормального и постоянного буксования, связанного с разностью радиуса колес, для транспортного средства, оборудованного управляемой системой «с четырьмя ведущими колесами»,
- он позволяет предохранять функцию 4×4, предупреждая о ненормальном и постоянном буксовании,
- он позволяет отслеживать адекватные условия вождения (обнаружение ускорения/торможения/устоявшейся скорости) для вычисления так называемого «постоянного» буксования,
- он позволяет производить оценку так называемого «постоянного» буксования и корректировать вычисление буксования между передней и задней осями,
- он позволяет оптимизировать характеристики моторики 4×4, точно контролируя буксование, порождаемое проскальзыванием (а не разностью радиуса колес),
- он позволяет повторно использовать оценочное постоянное буксование в конце предыдущей фазы качения, как только начинается следующая фаза качения,
- он позволяет устранять буксование по причине «нагрузки двигателя» на вращаемую ось,
- его можно применять при любом управляемом режиме работы (4×4 автоматический или 4×4 внедорожный), задаваемом водителем,
- его можно применять при любом техническом исполнении тормозной системы (с/без ABS, с/без ESP).
Изобретение относится к полноприводным трансмиссиям транспортных средств. Способ управления механическим средством соединения двух осей трансмиссии транспортного средства, где первая ось приводится во вращение по умолчанию, а вторая ось - факультативно, в зависимости от состояния средства соединения, содержит этап пропорционально-интегрального регулирования буксования между первой и второй осями. Регулируют посредством подачи команды на изменение значения механического момента, передаваемого муфтой. Буксование вычисляют непрерывно. Определяют заданное значение буксования и используют разность между вычисленным буксованием и заданным значением буксования для вычисления значения передаваемого момента. Изобретение также относится к способу обеспечения работы системы трансмиссии транспортного средства и к системе управления состоянием средства соединения осей трансмиссии, согласно вышеуказанному способу управления средством соединения. Улучшаются эксплуатационные характеристики транспортного средства. 4 н. и 4 з.п. ф-лы, 10 ил.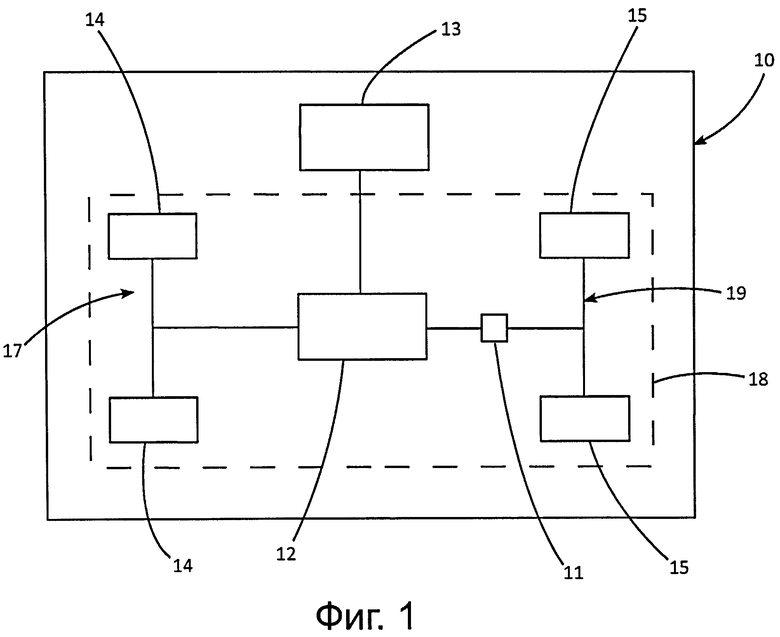
1. Способ управления механическим средством (11) соединения первой (17) и второй (19) осей системы (18) трансмиссии автотранспортного средства (10), при этом первая ось выполнена с возможностью приведения во вращение по умолчанию, а вторая ось выполнена с возможностью приведения во вращение факультативно в зависимости от состояния средства соединения, отличающийся тем, что содержит этап регулирования, в частности, пропорционально-интегрального регулирования буксования между первой и второй осями, при этом регулирование осуществляют посредством подачи команды на изменение значения механического момента (Те), передаваемого муфтой, причем буксование вычисляют непрерывно, при этом определяют заданное значение буксования и используют разность между вычисленным буксованием и заданным значением буксования для вычисления значения передаваемого момента.
2. Способ управления по п. 1, отличающийся тем, что используют, по меньшей мере, один из следующих сигналов, для определения заданного значения буксования:
- сигнал запуска двигателя,
- сигнал радиуса поворота или угла рулевого колеса или бокового ускорения,
- сигнал отклонения радиусов колес,
- сигнал скорости вращения колес,
- сигнал скорости транспортного средства,
- сигнал режима двигателя,
- сигнал крутящего момента двигателя,
- сигнал положения педали акселератора,
- сигнал положения средства управления выбором режима трансмиссии,
- сигнал уровня момента, прикладываемого к муфте,
- сигнал теплового состояния муфты,
- логический сигнал активации педали тормоза или рычага стояночного тормоза,
- логический сигнал регулирования ABS, ASP.
3. Способ управления по п. 1, отличающийся тем, что значение передаваемого момента переустанавливают на заданное значение, в частности, на ноль, если:
- предыдущий передаваемый момент (TcPrev) является нулевым, или
- транспортное средство находится в фазе торможения или ускорения, или
- система трансмиссии переходит или находится в режиме трансмиссии с двумя ведущими колесами.
4. Способ управления по п. 1, отличающийся тем, что генерируют нижние и/или верхние пределы момента, передаваемого муфтой, и сигнал управления моментом, передаваемым муфтой, насыщают этим пределом или этими пределами.
5. Способ управления по п. 1, отличающийся тем, что записывают в память значение постоянного буксования, измеренное или оцененное во время первой фазы качения транспортного средства, и используют это значение буксования в другой фазе качения транспортного средства, следующей после первой фазы качения транспортного средства.
6. Способ обеспечения работы системы (18) трансмиссии автотранспортного средства, при этом система содержит первую ось (17), выполненную с возможностью приведения во вращение по умолчанию, и вторую ось (19), выполненную с возможностью вращения факультативно в зависимости от состояния механического средства (11) соединения первой и второй осей, отличающийся тем, что содержит фазу применения способа управления по п. 1.
7. Система (12) управления состоянием механического (11) средства соединения первой (17) и второй (19) осей системы (18) трансмиссии автотранспортного средства (10), при этом первая ось выполнена с возможностью приведения во вращение по умолчанию, а вторая ось выполнена с возможностью приведения во вращение факультативно в зависимости от состояния средства соединения, отличающаяся тем, что содержит технические и/или программные средства для осуществления способа по п. 1.
8. Автотранспортное средство (10), содержащее систему (12) управления по п. 7.
| US 2009127014 A1, 21.05.2009 | |||
| Рефрактометр | 1984 |
|
SU1188597A1 |
| Устройство для контроля блоков памяти | 1985 |
|
SU1275549A1 |
| JP 2004338456 A, 02.12.2004. | |||

