Изобретение касается стругового устройства со стругом, реверсированно подвижным посредством тяговой цепи струга и перемещающимся возвратно-поступательно между концевыми упорами струга, по меньшей мере, с двумя цепными приводами, имеющими, соответственно, по двигателю с переменной частотой вращения, по передаточному механизму и по стоящей в зацеплении со звеньями цепи струга цепной звездочке струга, с системой измерения хода струга и с устройством управления двигателем, которое, например, при программном или позиционном управлении выдает управляющие параметры для изменения частоты вращения приводных двигателей для изменения скорости струга и к которому присоединен управляющий модуль с автоматической регулировкой выравнивания нагрузки между приводными двигателями цепных приводов. Далее изобретение касается способа управления струговым устройством, в частности устройством угольного струга для подземной горнодобывающей промышленности, с, по меньшей мере, двумя цепными приводами, каждый из которых имеет двигатель с переменной частотой вращения, передаточный механизм и цепную звездочку струга, со стругом, приводимым в действие посредством тяговой цепи струга, который перемещается в режиме эксплуатации, с реверсированием между концевыми упорами струга возвратно-поступательно, с системой измерения хода струга, которая подготавливает сигналы о позиции струга, и с устройством управления двигателем, которое выдает управляющие параметры в приводные двигатели и к которому присоединен управляющий модуль, который в нормальном режиме работы автоматически обеспечивает уравнивание нагрузки между обоими приводными двигателями и согласовывает друг с другом управляющие параметры обоих приводных двигателей.
Соответствующего рода струговое устройство эксплуатируется в шахте “Ibbenburen” и описано в журнале Bergbau 7/2003, S.311-315. Струговое устройство снабжено унифицированными 400 кВт двигателями с вентильным преобразователем частоты, которые могут через профессиональную шину интерфейса сообщаться между собой и с вышестоящим центром лавы для телеметрического диагностирования. Приводные двигатели цепных приводов допускают эксплуатацию в продолжительном режиме работы с частотами вращения 80-1800 об/мин, и устройство управления двигателем содержит управляющий модуль, который обеспечивает автоматическое уравнивание нагрузки обоих приводимых цепные звездочки струга приводных двигателей. Система измерения хода струга содержит импульсный датчик перемещений струга в приводных механизмах перегрузки и скорость струга может регулироваться на концах лавы бесступенчато. При этом на концах лавы приводные двигатели сохраняют свой максимальный крутящий момент. Установленное в шахте “Ibbenburen” струговое устройство делает возможной высокую выработку. В продолжительном режиме работы стругового устройства в единичных случаях возникает, тем не менее, необычно сильный износ цепей в некоторых немногих звеньях цепи, а также на зубьях цепных звездочек струга.
Задачей изобретения является создать улучшенное струговое устройство и способ эксплуатации стругового устройства, которые предотвращают возникновения чрезмерного износа цепей при тех же самых показателях продуктивности и производительности стругового устройства.
Эта задача решается согласно изобретению для стругового устройства посредством того, что предусмотрен модуль контроля, который выключает регулирующий модуль автоматического уравнивания нагрузки соответствующим способом, например с помощью позиционного управления, программным управлением и/или посредством регулирования параметров, или модифицирует режим работы регулирующего модуля. Для соответствующего изобретению способа задача решается посредством того, что управляющий модуль выключает регулирующий модуль для автоматического уравнивания нагрузки, например, с помощью позиционного управления в зависимости от сигналов о позиции струга и направления движения струга, программным управлением или посредством регулирования параметров, или временно изменяет режим работы регулирующего модуля.
Тщательные испытания износа цепей у струговой установки в “Ibbenburen” показали, что чрезмерный износ цепей ограничен локально тремя-пятью звеньями цепи, соответственно, в конце той ветви цепи, которая тогда, когда струг поступает в концевую струговую область тянущего в данном направлении движения струга главного привода, стоит в зацеплении с цепной звездочкой струга другого (вспомогательного) цепного привода. Было установлено, что высокий износ цепи струга на соответствующих звеньях цепи обусловлен высокими напряжениями цепи, которые возникают в цепи струга, если двигатели струга развивают их максимальный крутящий момент также тогда, когда струг проходит в концевой струговой области с пониженной скоростью струга, чего едва ли можно избежать, чтобы избежать повреждений, например, на механических концевых упорах струга или, соответственно, в приводах.
Соответствующее изобретению решение проблемы состоит в том, чтобы предусмотреть модуль контроля, который выключает регулирующий модуль для автоматического уравнивания нагрузки и генерирует собственно управляющие параметры и, соответственно, изменяет выданные регулирующим модулем на приводные двигатели управляющие параметры. При до сих пор используемых устройствах управления двигателем для приводных двигателей с переменной частотой вращения, которые работают с автоматической регулировкой уравнивания нагрузки, автоматическое уравнивание нагрузки между основным приводом и вспомогательным приводом сохраняется во всех рабочих режимах за счет того, например, что истинное значение электрического тока одного из двигателей передается, соответственно, как управляющий параметр на устройство управления другого двигателя, и как основной привод, так и вспомогательный привод получают одно и то же заданное значение частоты вращения. Так как в концевой области струга одновременно скорость струга частично снижена до крайне низких скоростей струга от 1/30 до 1/10 нормальной скорости струга, без соответствующей изобретению регулировки на понижение регулирующего модуля для автоматического уравнивания нагрузки в цепь может передаваться полный вращающий момент привода обоих цепных приводов, из чего могут следовать крайне высокие напряжения цепи в нижней ветви цепи струга, которые сами могли бы вести при толщине проволоки цепи струга 38 мм или 42 мм к значительному износу цепей и механическому истиранию звеньев цепи. За счет соответствующих изобретению мероприятий, напротив, упомянутая проблема не возникает.
При соответствующем изобретению способе, предпочтительно, модуль контроля может сравнивать частоту вращения привода удаленного от струга (вспомогательного) цепного привода с заданной частотой вращения и подавать управляющий параметр для этого удаленного от струга цепного привода согласно собственной управляющей программе при недостижении заданной частоты вращения на предварительно установленное отклонение. Однако особенно предпочтительно, если модуль контроля выполняет выключение или, соответственно, регулировку на понижение нормального режима работы регулирующего модуля как с регулированием по частоте вращения, так и с помощью позиционного управления, а именно, если система измерения хода струга регистрирует струг в концевой струговой области, и тогда подает разные управляющие параметры для обоих двигателей.
Как в струговом устройстве, так и при соответствующем изобретению способе особенно выгодно, если приводные двигатели состоят из двигателей с вентильными преобразователями частоты. Далее выгодно, если передаточные механизмы охватывают приводной механизм перегрузки с многодисковым сцеплением, так что соответствующие изобретению струговое устройство и способ делают возможным, например, также мягкий пуск и снабжены защитой от перегрузки.
Модуль контроля и/или регулирующий модуль могут состоять, в частности, из модулей программного обеспечения для устройства управления двигателем. Соответствующее изобретению решение для стругового устройства и способа может быть реализовано, следовательно, путем предусмотрения дополнительного программного обеспечения и, соответственно, подпрограмм.
В струговом устройстве и в способе может быть предусмотрено, в частности, чтобы управляющие параметры одного двигателя образовывали входные величины для регулирующего модуля в нормальном режиме работы, в то время как модуль контроля модифицирует управляющие параметры для другого двигателя пропорционально или согласно заданному алгоритму в модифицированном режиме регулирующего модуля. При этом в самом простом выполнении может быть достаточно, чтобы модуль контроля регулировал с понижением управляющие параметры, соответственно, для другого двигателя на величину, при которой соответствующий привод принимает, по существу, только нагрузку от трения цепи струга в нижней ветви цепной линии, так что одновременно избегают образования провисания цепей на другом цепном приводе (главный привод). Модуль контроля может ограничивать, в частности, крутящий момент двигателя одного из приводных двигателей на предварительно установленную величину.
При соответствующем изобретению струговом устройстве и соответствующем изобретению способе можно работать с центральным, и при необходимости, - подземным управлением двигателя. При предпочтительном варианте конструкции устройство управления двигателя присоединено к каждому двигателю, причем устройства управления двигателей непосредственно сообщаются друг с другом через сигнальные соединения, такие как шина данных или радио либо присоединены к устройству управления двигателем более высокого уровня. Модифицированный режим работы может также предусматривать, чтобы соответствующий вспомогательный привод, как только модуль контроля включается в управление, игнорировал управляющие параметры другого цепного привода.
Дальнейшие преимущества и варианты выполнения изобретения получаются также из следующего описания схематически представленного на чертежах примера исполнения. Чертежи показывают:
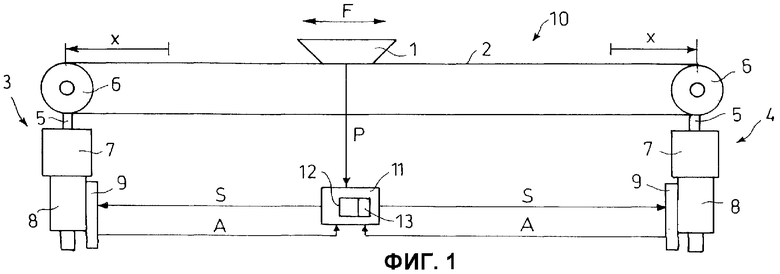
Фиг.1 - схематически соответствующее изобретению струговое устройство в режиме работы струга с уравниванием нагрузки; и
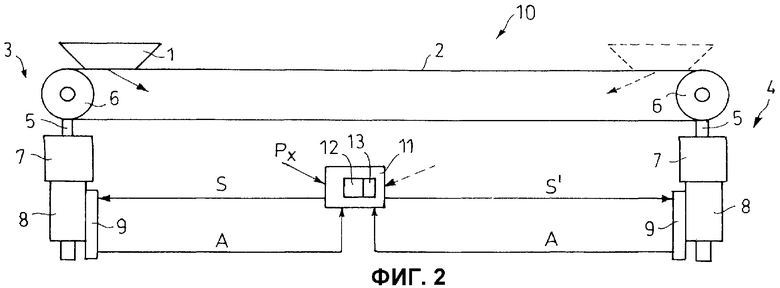
Фиг.2 - схематически соответствующее изобретению струговое устройство при активном устройстве контроля.
На чертежах представлено в целом обозначенное цифрой 10 соответствующее изобретению струговое устройство, которое содержит струг 1, который посредством цепи 2 струга с реверсированием движется возвратно-поступательно между расположенными на боковых концах цепными приводами 3 и, соответственно, 4 для цепи 2 струга. Реверсирующее движение струга 1 обозначено на фиг.1 двойной стрелкой F. Оба цепных привода 3, 4 построены в принципе идентично и содержат смонтированную в подшипниках на ведущем валу 5 цепную звездочку 6, передаточный механизм 7, а также приводной двигатель 8, в случае которого в представленном примере выполнения речь идет, соответственно, о двигателе с вентильным преобразователем частоты с расположенной, например, в отдельном распределительном ящике 9 управляющем схемой вентильного преобразователя частоты. Двигатель 8 с вентильным преобразователем частоты может работать в продолжительном режиме с переменной частотой вращения, с частотами вращения в сравнительно большой полосе частот от, например, 80 до 1800 об/мин, причем посредством изменения частоты вращения приводных двигателей 8 достигают изменения частоты вращения соответствующей ведущей звездочки 6 цепного привода и вместе с тем также скорости хода струга 1. Оба передаточных механизма 7 содержат, как это известно для струговых приводов в подземной горнодобывающей промышленности, передаточный механизм для защиты от перегрузки с многодисковым сцеплением, который, например, при блокировках цепи 2 струга или самого струга 1 автоматически разъединяет привод 8 струга от цепной звездочки 6 струга, связанной без возможности проворачивания с ведущим валом 5.
Для безлюдного автоматического управления струговым устройством 10 на чертежах представлена управляющая электронно-вычислительная машина 11, которая снабжена соответствующим программным обеспечением автоматизации с многочисленными модулями программного обеспечения и связана, например, посредством шины интерфейса с двигателями 8 для управления и дистанционного диагностирования рабочего режима обоих приводных двигателей 8 цепных приводов 3, 4. Модуль программного обеспечения в управляющей электронно-вычислительной машине 11 состоит при этом из устройства управления двигателем, посредством которого скорость хода струга 1 в области концевых упоров струга, которые представлены на фиг.1 стрелками X и проходят в диапазоне от примерно 0 до 10 м перед соответствующими цепными приводами 3, 4, снижается до более низкой скорости понижением частоты вращения двигателей 8 с вентильным преобразователем частоты. Далее управляющая электронно-вычислительная машина 11 содержит блок обработки результатов для сигнала P позиционирования струга не представленной здесь отдельно системы измерения перемещений струга. На фиг.1 и 2 текущая позиция струга обозначена стрелкой P между стругом 1 и управляющей электронно-вычислительной машиной 11. Как правило, сигнал позиционирования струга P производится, однако, не самим стругом 1, а после процесса установки мгновенный сигнал P позиционирования струга рассчитывается по числу оборотов цепных звездочек 6 струга и подводится к управляющей электронно-вычислительной машине 11. Далее управляющая электронно-вычислительная машина 11 содержит здесь символически обозначенный регулирующий модуль 12 для автоматического уравнивания нагрузки, причем этот регулирующий модуль 12 состоит обычно из дополнительного модуля программного обеспечения. Регулирующий модуль 12 для уравнивания нагрузки проверяет актуальные управляющие данные A приводных двигателей 8 обоих цепных приводов 3, 4 для цепи 2 струга и обеспечивает, чтобы в оба приводных двигателя 8 в каждый момент времени во время прохода струга 1 подавались одни и те же управляющие параметры S как, например, заданное число оборотов, электрический ток двигателя, мощность двигателя и т.д., так что оба цепных привода 3, 4 ведут себя в течение всей продолжительности производственного процесса идентично. Уравнивание нагрузки посредством регулирующего модуля 12 может происходить, например, таким образом, что приводной двигатель 8 цепного привода 3 образует, соответственно, двигатель-задатчик, настроечные данные которого принимаются, соответственно, другим приводным двигателем 8, который образует тогда так называемый двигатель-исполнитель, причем обмен соответствующими управляющими параметрами происходит либо, как в показанном примере выполнения, через управляющую электронно-вычислительную машину 11, альтернативно же, он может происходить также путем коммуникации управляющих схем обоих приводных двигателей 8 непосредственно друг с другом. Струговое устройство 10 с описанными выше признаками известно из уровня техники, причем у известных струговых устройств регулирующий модуль 12 для уравнивания нагрузки активен в каждый момент времени, следовательно, - постоянно.
Ссылаясь на фиг.2, далее описывается критический случай, если струг 1, например, входит в концевую струговую область (X, на фиг.1) левого на фиг.2 цепного привода 3 и находится на небольшом расстоянии от не представленного на чертеже концевого упора двигателя, который будет состоять в большинстве случаев из механического концевого упора двигателя, однако, мог бы состоять также из позиционного сигнала или т.п. Цепной привод 3, к которому цепью 2 струга подтягивается струг 1, обозначается в литературе часто как главный привод, в то время как, соответственно, другой цепной привод 4, который тянет только длинную цепь в направляющей нижней ветви струга, тогда образует вспомогательный привод. Из-за реверсивного режима работы струга 1 распределение приводов на основной и вспомогательный привод изменяется, тем не менее, при каждом проходе струга, так что при современном способе управления в большинстве случаев один из обоих цепных приводов образует привод-задатчик, а другой цепной привод - привод-исполнитель. Если струг 1 входит теперь в обозначенную X на фиг.1 концевую струговую область, то управляющая электронно-вычислительная машина 11 получает позиционный сигнал Px и позиционно управляемая этим управляющим сигналом управляющая электронно-вычислительная машина 11 посредством программы управления двигателем генерирует новые управляющие параметры для обоих приводных двигателей 8, причем, в частности, задаваемая частота вращения двигателя значительно снижена по сравнению с частотой вращения двигателя в нормальном режиме работы струга, чтобы предотвратить наталкивание струга 1 на полной скорости на концевой упор струга. В концевой струговой области X можно, однако, часто наблюдать, что струг 1 должен прорезать также крепежные забутовки конвейерного штрека, и таким образом он тормозится дополнительным навалом руды и другими влияниями на его скорость. Чтобы показывать при всем том неизменную работоспособность и производительность при пониженной частоте вращения, управляющая электронно-вычислительная машина 11 повышает, например, подаваемый к обоим приводным двигателям 8 как управляющий параметр электрический ток двигателя и, вместе с тем, - крутящий момент двигателя, причем одновременно регулирующий модуль 12 уравнивания нагрузки управляющей электронно-вычислительной машины 11 обеспечивал бы те же настроечные данные в другом двигателе 8 цепного привода 4.
Согласно изобретению управляющая электронно-вычислительная машина 11 оборудована модулем 13 контроля, который опять-таки может состоять, в частности, из модуля программного обеспечения и, соответственно, подпрограммы программного обеспечения, и который, в частности, при позиционном управлении как только струг 1 достигнет концевой области X лавы или определенного места в пределах концевой области X лавы, лишает силы воздействие и принцип действия регулирующего модуля 12 уравнивания нагрузки. На фиг.2 воздействие модуля 13 контроля представлено с разными управляющими параметрами: S - для приводного двигателя 8 цепного привода 3, и S' - для приводного двигателя 8 цепного привода 4 (вспомогательный привод и, соответственно, привод-исполнитель). Разные управляющие параметры S, S' могут соотноситься пропорционально друг к другу за счет того, например, что в приводной двигатель 8 цепного привода-исполнителя 4 подаются только уменьшенные управляющие параметры (например, крутящий момент двигателя, электрический ток двигателя и т.д.). Тем не менее, модуль контроля 13 может быть также активен, если актуальная частота вращения цепной звездочки 6 привода-исполнителя 4 с соответствующим знаком лежит существенно ниже заданного программой управления двигателем управляющей электронно-вычислительной машины 11 числа оборотов, причем тогда управляемый ток больше не задается на входе управления для привода-исполнителя фактическим выходным током приводного двигателя 8 привода-задатчика 3, а будет выровнен в противовес выданному сигналу или отрегулирован на заданное в модуле 13 контроля значение. Тем не менее, принцип действия модуля 13 контроля может основываться также на многочисленных других функциях и образах действия, что раскрывается специалисту сразу из предыдущего описания.
Выключение и, соответственно, модификация управления двигателем и уравнивания нагрузки регулирующим модулем 12 препятствуют тому, что в момент времени незадолго до достижения концевого упора и реверсирования струга 1 возникает повышенно высокое натяжение цепи, которое проявляется, в частности, в нижней ветви цепи 2 струга и могло бы вести - без модуля 13 контроля - к маятниковым поворотным движениям цепной звездочки 6 струга в соответствующем приводе-исполнителе 4 и к износу находящихся с ней в зацеплении звеньев цепи 2 струга.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОБЫЧИ УГЛЯ И СТРУГОВАЯ УСТАНОВКА | 2006 |
|
RU2390630C2 |
| Струговая установка | 1976 |
|
SU649843A1 |
| Струговая установка | 1977 |
|
SU734417A1 |
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ЗВЕЗДОЧЕК ЦЕПНЫХ ПРИВОДОВ | 2004 |
|
RU2343279C2 |
| СПОСОБ УПРАВЛЕНИЯ ЦЕПНЫМИ ПРИВОДНЫМИ УСТРОЙСТВАМИ ПОДЗЕМНЫХ РАБОЧИХ МАШИН, В ЧАСТНОСТИ ЦЕПНЫХ СКРЕБКОВЫХ ТРАНСПОРТЕРОВ, И ЦЕПНОЙ СКРЕБКОВЫЙ ТРАНСПОРТЕР | 2002 |
|
RU2280604C2 |
| СТРУГОВАЯ УСТАНОВКА | 1993 |
|
RU2072043C1 |
| СТРУГ ДЛЯ СТРУГОВЫХ УСТАНОВОК И СТРУГОВАЯ УСТАНОВКА ДЛЯ НАКЛОННОЙ ФОРМАЦИИ | 2010 |
|
RU2556601C2 |
| ПРИВОДНАЯ СТАНЦИЯ ДЛЯ ПОДЗЕМНОЙ СТРУГОВОЙ УСТАНОВКИ, А ТАКЖЕ СПОСОБ ПРОВЕДЕНИЯ РЕМОНТА ДОБЫЧНЫХ СТРУГОВ | 2008 |
|
RU2439320C2 |
| Привод струговой установки | 1989 |
|
SU1706396A3 |
| Способ автоматизированной струговой выемки угля в лаве | 1991 |
|
SU1836557A3 |
Изобретение относится к горной промышленности, а именно к средствам автоматического регулирования приводами струговых устройств, а также к способу управления приводами струговых устройств. Техническим результатом является предотвращение возникновения чрезмерного износа цепей струга. Струговое устройство содержит подвижной струг с реверсированием посредством цепи струга и перемещающимся возвратно-поступательно между концевыми упорами струга два цепных привода, систему измерения хода струга и устройство управления двигателем. Каждый из цепных приводов имеет приводной двигатель с переменной частотой вращения, передаточный механизм и находящуюся в зацеплении со звеньями цепи струга цепную звездочку струга. Устройство управления двигателя при программном или позиционном управлении подает управляющие параметры для изменения частоты вращения приводных двигателей для изменения скорости струга, и к нему присоединен регулирующий модуль с автоматической регулировкой выравнивания нагрузки между приводными двигателями цепных приводов. Струговое устройство дополнительно содержит модуль контроля, который выключает регулирующий модуль автоматического уравнивания нагрузки с помощью позиционного управления, с программным управлением и/или посредством регулирования параметров, или модифицирует режим работы регулирующего модуля. 2 н. и 17 з.п. ф-лы, 2 ил.
1. Струговое устройство со стругом (1), подвижным с реверсированием посредством цепи (2) струга и перемещающимся возвратно-поступательно между концевыми упорами струга, по меньшей мере, с двумя цепными приводами (3; 4), каждый из которых имеет приводной двигатель (8) с переменной частотой вращения, передаточный механизм (7) и находящуюся в зацеплении со звеньями цепи (2) струга цепную звездочку (6) струга, с системой измерения хода струга и с устройством (11) управления двигателем, которое при программном или позиционном управлении, подает управляющие параметры для изменения частоты вращения приводных двигателей (8) для изменения скорости струга, и к которому присоединен регулирующий модуль (12) с автоматической регулировкой выравнивания нагрузки между приводными двигателями (8) цепных приводов (3; 4), отличающееся тем, что содержит модуль (13) контроля, который выключает регулирующий модуль (12) автоматического уравнивания нагрузки с помощью позиционного управления, с программным управлением и/или посредством регулирования параметров, или модифицирует режим работы регулирующего модуля (12).
2. Устройство по п.1, отличающееся тем, что модуль контроля (13) при позиционном управлении, если система измерения хода струга регистрирует струг в концевой струговой области (X), подает разные управляющие параметры (S; S') для обоих приводных двигателей (8).
3. Устройство по п.1 или 2, отличающееся тем, что модуль (13) контроля деактивирует регулирующий модуль, при регулировании параметров, при недостижении частоты вращения или разницы в частоте вращения, или модифицирует его режим работы.
4. Устройство по п.1, отличающееся тем, что приводные двигатели представляют собой двигатели (8, 9) с вентильным преобразователем частоты.
5. Устройство по п.1, отличающееся тем, что передаточные механизмы (7) содержат передаточный механизм для защиты от перегрузки с многодисковым сцеплением.
6. Устройство по п.1, отличающееся тем, что модуль (13) контроля и/или регулирующий модуль (12) состоят из модулей программного обеспечения для устройства управления двигателем.
7. Устройство по п.1, отличающееся тем, что управляющие параметры одного приводного двигателя образуют входные величины для регулирующего модуля (12) уравнивания нагрузки, а модуль (13) контроля в модифицированном режиме работы регулирующего (12) модуля модифицирует управляющие параметры (S') для другого приводного двигателя (8) пропорционально или согласно заданному алгоритму.
8. Устройство по п.1, отличающееся тем, что модуль (13) контроля ограничивает крутящий момент одного из приводных двигателей согласно предварительно установленному значению.
9. Устройство по п.1, отличающееся тем, что к каждому двигателю присоединено устройство управления двигателем, причем устройства управления двигателем непосредственно сообщаются друг с другом через сигнальные соединения или сообщаются с устройством (11) управления двигателем более высокого уровня.
10. Способ управления струговым устройством, в частности, для подземной горнодобывающей промышленности, с, по меньшей мере, двумя цепными приводами (3; 4), каждый из которых имеет, приводной двигатель (8) с переменной частотой вращения, передаточный механизм (7), цепную звездочку (6), с приводимым в действие посредством струговой цепи (2) стругом (1), который перемещается в режиме эксплуатации с реверсированием между концевыми упорами струга возвратно-поступательно, с системой измерения хода струга, которая подготавливает сигналы (Р) о позиции струга, и с устройством (11) управления двигателем, которое подает управляющие параметры (S) в приводные двигатели (8) и к которому присоединен регулирующий модуль (12), который в нормальном режиме работы автоматически обеспечивает уравнивание нагрузки между обоими приводными двигателями (8) и согласовывает друг с другом управляющие параметры (S) обоих приводных двигателей (8), отличающийся тем, что модуль (13) контроля, которым управляют позиционно, в зависимости от позиционных сигналов (Рх) струга и направления движения струга (1) программным управлением, или посредством регулирования параметров, выключает регулирующий модуль (12) для уравнивания нагрузки или временно изменяет режим работы управляющего модуля (12).
11. Способ по п.10, отличающийся тем, что модуль контроля сравнивает частоту вращения приводного вала удаленного от струга цепного привода с заданной частотой вращения и, при не достижении предварительно установленного отклонения от заданной частоты вращения, подает управляющие параметры для этого удаленного от струга цепного привода, согласно собственной управляющей программе.
12. Способ по п.10 или 11, отличающийся тем, что модуль (13) контроля, управляясь позиционно, если система измерения хода струга регистрирует струг в концевой струговой области (X), подает разные управляющие параметры (S; S') на оба приводных двигателя (8).
13. Способ по п.10, отличающийся тем, что модуль (13) контроля при регулировании параметров, при не достижении частоты вращения или разницы в частотах вращения деактивирует регулирующий модуль (12) или модифицирует его режим работы.
14. Способ по п.10, отличающийся тем, что модуль (13) контроля и/или регулирующий модуль (12) состоят из модулей программного обеспечения для устройства (11) управления двигателем.
15. Способ по п.10, отличающийся тем, что в качестве приводных двигателей используют двигатели (8, 9) с вентильным преобразователем частоты.
16. Способ по п.10, отличающийся тем, что передаточные механизмы (7) содержат передаточный механизм с защитой от перегрузки с многодисковым сцеплением.
17. Способ по п.10, отличающийся тем, что управляющие параметры одного приводного двигателя образуют входные величины для регулирующего модуля (12), а модуль (13) контроля в модифицированном режиме работы регулирующего (12) модуля модифицирует управляющие параметры (S') для другого приводного двигателя (8) пропорционально или согласно заданному алгоритму.
18. Способ по п.10, отличающийся тем, что модуль контроля ограничивает крутящий момент одного из приводных двигателей согласно предварительно установленному значению.
19. Способ по п.10, отличающийся тем, что к каждому двигателю присоединено устройство управления двигателем, причем устройства управления двигателем непосредственно сообщаются друг с другом через сигнальные соединения или сообщаются с устройством (11) управления двигателем более высокого уровня.
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2002 |
|
RU2209967C1 |
| Устройство управления горной машиной | 1987 |
|
SU1476125A1 |
| Цепной привод для цепных транспортеров и добычных машин для подземных горных разработок | 1989 |
|
SU1794220A3 |
| DE 3502664 A1, 31.07.1986 | |||
| US 5343130 A, 30.08.1994 | |||
| US 5513902 A, 07.05.1996 | |||
| Журнал Bergbau, 7/2003, с.311-315. | |||

