1
Изобретение относится к горной промышленности, к устройствам автоматического управления горными машинами, в частности может быть использовано для управления выемочным комбайном в механизированном комплексе, струговой установкой с регулируемым приводом подачи, асинхронным электродвигателем резания и регулируемым приводом перемещения става конвейера.
Целью изобретения является повышение надежности горной машины путем исключения перегрузок электродвигателя резания.
На фиг. 1 приведена структурная схема устройства управления горной машиной; на фиг. 2 - структурная схема привода перемещения става конвейера; на фиг. 3 - диаграммы работы блоков устройства.
Устройство управления горной машиной 1 с регулируемым приводом 2 подачи, .асинхронным электродвигателем 3 резания и регулируемым приводом 4 перемещения става конвейера содержит регулятор 5 нагрузки, элемент 6 сравнения, задатчик 7 нагрузки, датчик 8 нагрузки электродвигателя резания горной машины, усилители 9 и 10, элемент 11 сравнения, выпрямитель 12, сумматор 13, источник 14 опорного сигнала.
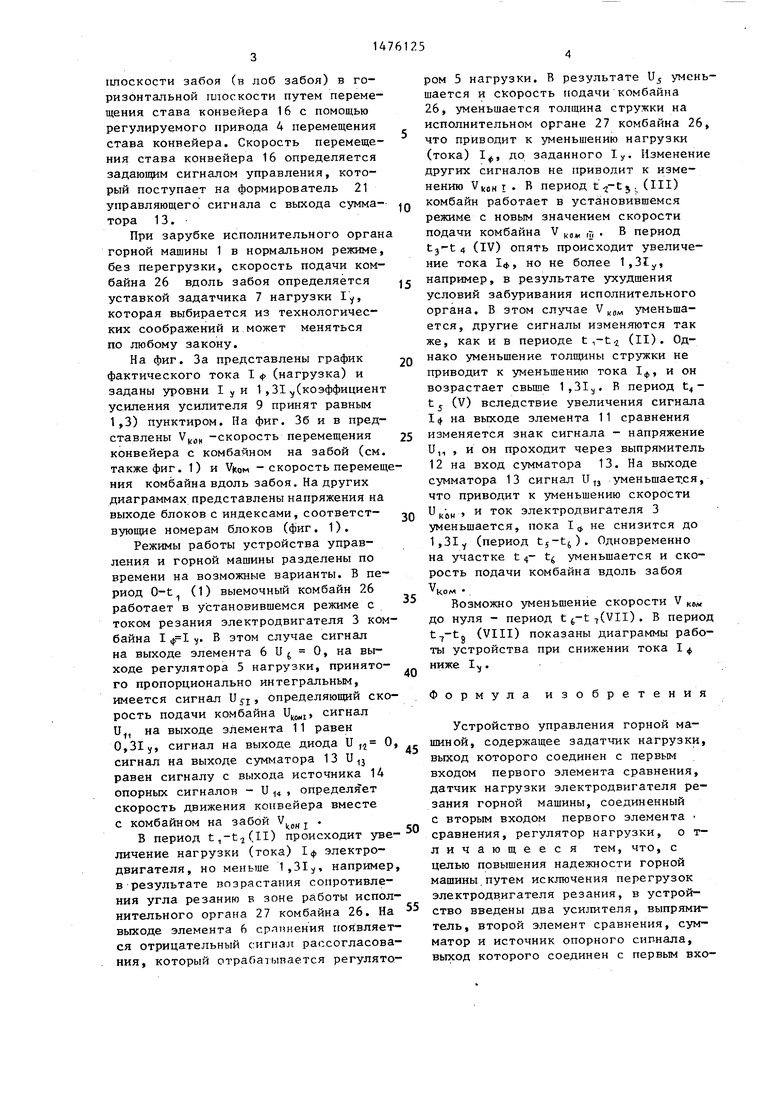
Структурная схема регулируемого привода перемещения става конвейера, например механизированных комплексов, включает гидродомкраты 15,15ft, присоединенные одним концом к ставу конвейера 16, другим - к основаниям секций комплекса 171-17п, гидравлический насос 18, приводящийся во вращение асинхронным электродвигателем 19, преобразователь 20 частоты, формирователь 21 управляющего сигнала. Для включения нужных домкратов служат распределители 22,-22h.
Электродвигатель комбайна присоединен к сети 23.
На фиг. 2 обозначены также напорная 24 и сливная 25 магистрали, выемочный комбайн 26, его исполнительный орган 27.
Устройство работает следующим об5 разом.
В режиме выемки угля горной машиной регулятор 5 нагрузки осуществляет поддержание заданной нагрузки, задаваемой задатчиком 7 нагрузки.
0 Регулятор отрабатывает сигнал, пропорциональный разности задаваемой нагрузки, соответствующей сигналу на первом входе элемента 6 сравнения, и фактической нагрузки, измеряемой датчиком 8 нагрузки (сигнал на втором входе элемента сравнения) , приводя его либо к нулю (астатический регулятор) , либо к минимуму (статический регулятор). Воздействие на горную
0 машину осуществляется путем изменения скорости подачи через регулируемый привод 2 подачи.
При зарубке исполнительного органа 27 в угольный массив подача ис5 полнительного органа 27 комбайна 26 осуществляется вдоль забоя путем изменения скорости перемещения (подачи) комбайна и перпендикулярно
плоскости забоя (в лоб забоя) в горизонтальной плоскости путем перемещения става конвейера 16 с помощью регулируемого привода 4 перемещения става конвейера. Скорость перемещения става конвейера 16 определяется задающим сигналом управления, который поступает на формирователь 21 управляющего сигнала с выхода сумма- тора 13.
При зарубке исполнительного органа горной машины 1 в нормальном режиме, без перегрузки, скорость подачи комбайна 26 вдоль забоя определяется уставкой задатчика 7 нагрузки 1у, которая выбирается из технологических соображений и может меняться по любому закону.
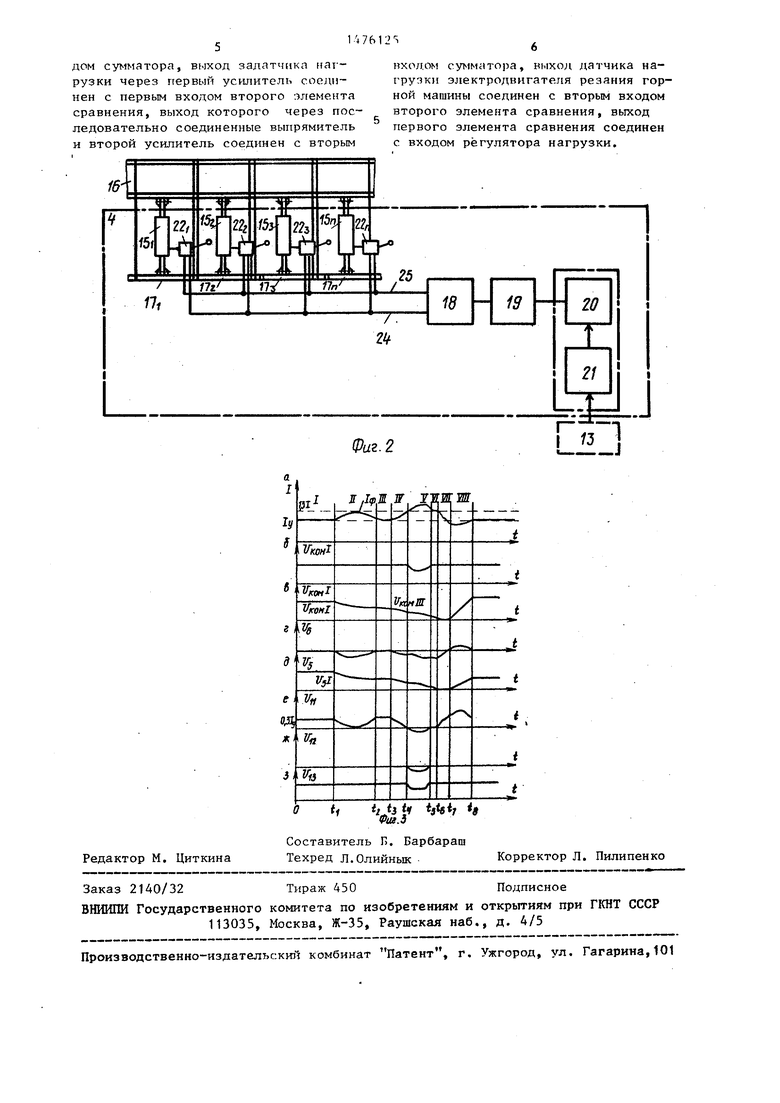
На фиг. За представлены график фактического тока I $ (нагрузка) и заданы уровни I y и 1 ,31 (коэффициент усиления усилителя 9 принят равным 1,3) пунктиром. На фиг. 36 и в представлены VKOH -скорость перемещения конвейера с комбайном на забой (см. также фиг. 1) и VKOM - скорость перемещения комбайна вдоль забоя. На других диаграммах представлены напряжения на выходе блоков с индексами, соответст- вующие номерам блоков (фиг. 1).
Режимы работы устройства управления и горной машины разделены по времени на возможные варианты. В период О-t (1) выемочный комбайн 26 работает в установившемся режиме с током резания электродвигателя 3 комбайна I у. В этом случае сигнал на выходе элемента 6 U t 0, на вы
ходе регулятора 5 нагрузки, принятого пропорционально интегральным, имеется сигнал , определяющий скорость подачи комбайна Ukwt, сигнал Uj, на выходе элемента 11 равен 0,31 у, сигнал на выходе диода U , О сигнал на выходе сумматора 13 U 13 равен сигналу с выхода источника 14 опорных сигналов - U H, определяет скорость движения конвейера вместе с комбайном на забой VkoMJ .
В период t1-tl(II) происходит уве личение нагрузки (тока) 1ф электродвигателя, но меньше 1,31у, например в результате возрастания сопротивления угла резанию в зоне работы исполнительного органа 27 комбайна 26. На выходе элемента 6 срлпнения появляется отрицательный сигнал рассогласования, который отрабатывается регулято
0 5 Q
5
0
0 5
ром 5 нагрузки. R результате U5 уменьшается и скорость подачи комбайна 26, уменьшается толщина стружки на исполнительном органе 27 комбайна 26, что приводит к уменьшению нагрузки (тока) 1, до заданного 1У. Изменение других сигналов не приводит к изменению VkoH т . В период t -z-tj , (III) комбайн работает в установившемся режиме с новым значением скорости подачи комбайна V ко„ гГ| . В период t3-t 4 (IV) опять происходит увеличение тока 1ф, но не более 1,31у, например, в результате ухудшения условий забуривания исполнительного органа. В этом случае V ком уменьшается, другие сигналы изменяются так же, как и в периоде t,-t2 (II). Однако уменьшение толщины стружки не приводит к уменьшению тока 1ф, и он возрастает свыше 1,3IS. В период t4- 15 (V) вследствие увеличения сигнала 1ф на выходе элемента 11 сравнения изменяется знак сигнала - напряжение U,., , и он проходит через выпрямитель 12 на вход сумматора 13. На выходе сумматора 13 сигнал U13 уменьшается, что приводит к уменьшению скорости U к он , и ток электродвигателя 3 уменьшается, пока I не снизится до 1,31 у (период ts-t6). Одновременно на участке t 4- t уменьшается и скорость подачи комбайна вдоль забоя VROM
Возможно уменьшение скорости V км до нуля - период tt-t7(VII). В период t7-tg (VIII) показаны диаграммы работы устройства при снижении тока Iф ниже 1.
Формула изобретения
Устройство управления горной машиной, содержащее задатчик нагрузки, выход которого соединен с первым входом первого элемента сравнения, датчик нагрузки электродвигателя резания горной машины, соединенный с вторым входом первого элемента сравнения, регулятор нагрузки, о т- личающееся тем, что, с целью повышения надежности горной машины путем исключения перегрузок электродвигателя резания, в устройство введены два усилителя, выпрямитель, второй элемент сравнения, сумматор и источник опорного сипнала, выход которого соединен с первым входом сумматора, выход задатчика нагрузки через первый усилитель соединен с первым входом второго -элемента сравнения, выход которого через последовательно соединенные выпрямитель и второй усилитель соединен с вторым
вхолом сумматора, выход датчика нагрузки электродвигателя резания горной машины соединен с вторым входом второго элемента сравнения, выход первого элемента сравнения соединен с входом регулятора нагрузки.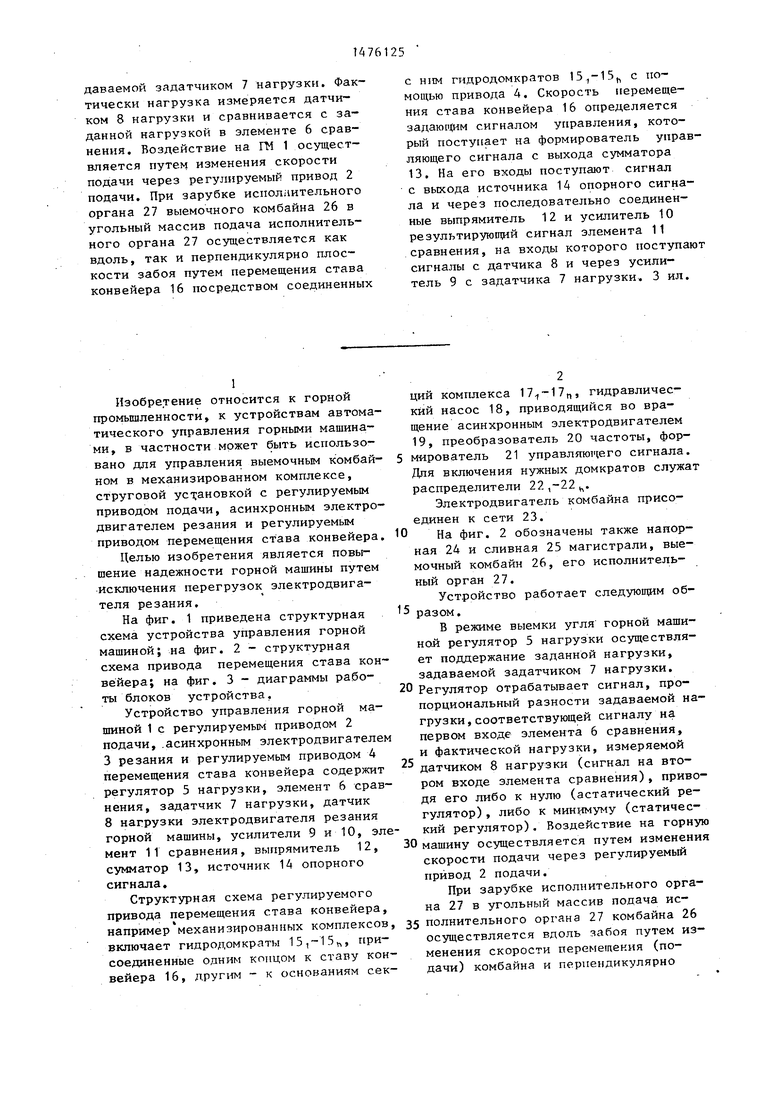
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ГОРНОГО КОМБАЙНА | 2001 |
|
RU2204715C1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Способ контроля границы уголь-порода | 1980 |
|
SU933992A1 |
| Устройство управления многоприводным механизмом подачи горной машины | 1990 |
|
SU1731946A1 |
| Устройство контроля тока регулятора нагрузки горной машины | 1981 |
|
SU1016504A1 |
| ВЫЕМОЧНАЯ МАШИНА | 1993 |
|
RU2026983C1 |
| Устройство автоматического управления забойной машиной и конвейером | 2022 |
|
RU2814926C1 |
| Устройство автоматического регулирования нагрузки угледобывающего комбайна | 2020 |
|
RU2747136C1 |
| УГЛЕДОБЫВАЮЩИЙ БАРАБАННЫЙ КОМБАЙН ДОЛИНСКОГО БКД, СПОСОБ ПОГРУЗКИ УГЛЯ НА КОНВЕЙЕР, БАРАБАННЫЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН ОЧИСТНОГО КОМБАЙНА, МЕХАНИЗМ ПОДЪЕМА ИСПОЛНИТЕЛЬНОГО ОРГАНА КОМБАЙНА, МЕХАНИЗМ ПОВЫШЕНИЯ УСТОЙЧИВОСТИ КОМБАЙНА, МЕХАНИЗМ ПОДАЧИ КОМБАЙНА | 2001 |
|
RU2244124C2 |
| СПОСОБ УПРАВЛЕНИЯ ГОРНЫМ КОМБАЙНОМ С ПЛАНЕТАРНО-ДИСКОВЫМ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ | 2016 |
|
RU2618630C1 |
Изобретение относится к горному делу и может быть использовано для управления горными машинами (ГМ) 1 с регулируемым приводом 2 подачи, асинхронным электродвигателем 3 резания и регулируемым приводом 4 перемещения става конвейера 16. Цель - повышение надежности ГМ путем исключения перегрузок электродвигателя резания. В режиме выемки угля ГМ 1 регулятор 5 нагрузки осуществляет поддержание заданной нагрузки, задаваемой задатчиком 7 нагрузки. Фактически нагрузка измеряется датчиком 8 нагрузки и сравнивается с заданной нагрузкой в элементе 6 сравнения. Воздействие на ГМ 1 осуществляется путем изменения скорости подачи через регулируемый привод 2 подачи. При зарубке исполнительного органа 27 выемочного комбайна 26 в угольный массив подача исполнительного органа 27 осуществляется как вдоль, так и перпендикулярно плоскости забоя путем перемещения става конвейера 16 посредством соединенных с ним гидродомкратов 151-15п с помощью привода 4. Скорость перемещения става конвейера 16 определяется задающим сигналом управления, который поступает на формирователь управляющего сигнала с выхода сумматора 13. На его входы поступают сигнал с выхода источника 14 опорного сигнала и через последовательно соединенные выпрямитель 12 и усилитель 10 результирующий сигнал элемента 11 сравнения, на входы которого поступают сигналы с датчика 8 и через усилитель 9 с задатчика 7 нагрузки. 3 ил.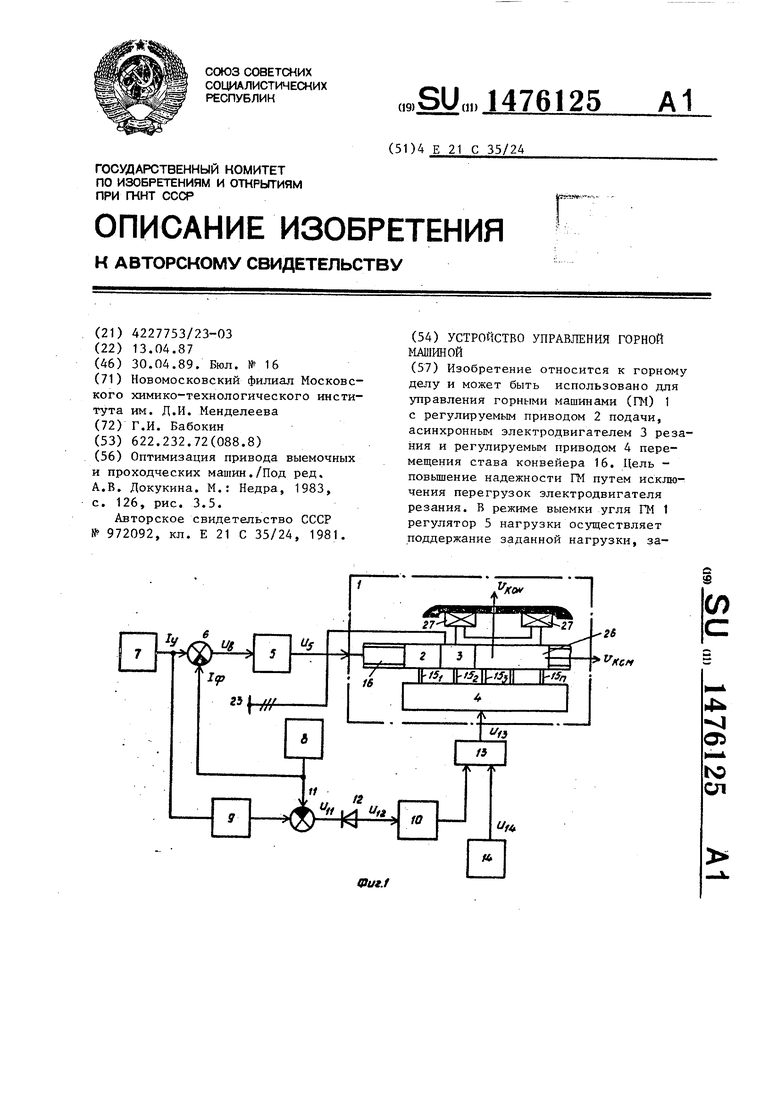
1у
S
ТЬон
ТГпн
-I
Фиг. 2
vK«sr
| Оптимизация привода выемочных и проходческих машин./Под ред, А.В | |||
| Докукина | |||
| М.: Недра, 1983, с | |||
| Ударно-вращательная врубовая машина | 1922 |
|
SU126A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ управления горной машиной и устройство для его осуществления | 1981 |
|
SU972092A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
