Изобретение относится к области военной техники, в частности к конструкциям установок, обеспечивающих наведение оружия в горизонтальной и вертикальной плоскостях.
Известно устройство башни военной бронированной машины (см. кн. "Танки и тракторы". Расчет и конструкции, А.И.Благонравов, Государственное издательство оборонной промышленности, Москва, 1940, стр.46-65), принятое за прототип. Устройство башни военной бронированной машины содержит оружие, постель для оружия, подвижную часть станка, неподвижную часть станка, приводы горизонтального и вертикального наведения.
Недостатками прототипа являются:
- сложность;
- высокая трудоемкость изготовления.
Предлагаемым изобретением решается задача: снижение трудоемкости изготовления, снижение массы приводов наведения, обеспечение защищенности от внешних воздействий, предполагается возможность модернизации.
Технический результат, получаемый при осуществлении изобретения, заключается в упрощении конструкции и возможности унификации для различных видов вооружения.
Указанный технический результат достигается тем, что в комплексе автоматического оружия, содержащем станок с подвижной и неподвижной частями, постель для оружия и приводы горизонтального и вертикального наведения, новым является то, что приводы горизонтального и вертикального наведения выполнены в виде раздвоенных многоступенчатых редукторов, привод горизонтального наведения закреплен на неподвижной части станка, на его выходном валу установлен привод вертикального наведения, связанный с подвижной частью станка, а на выходных валах привода вертикального наведения установлена качалка с элементами крепления постели оружия.
Каждая ветвь двухветвийного редуктора привода вертикального наведения заканчивается кулачково-роликовым механизмом, а предпоследняя ступень редуктора снабжена торсионным валом, закрученным таким образом, что при прямой передаче ведущей является одна ветвь редуктора, а при реверсе - другая.
Двухветвийный редуктор привода горизонтального наведения заканчивается кулачково-роликовым механизмом, а ступени ветвей подвода к валу кулачка связаны между собой торсионом.
Предлагаемое техническое решение за счет блочности конструкции позволяет снизить трудоемкость изготовления, снизить массу приводов наведения, обеспечить их защищенность от внешних воздействий, а также предполагает возможность модернизации.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
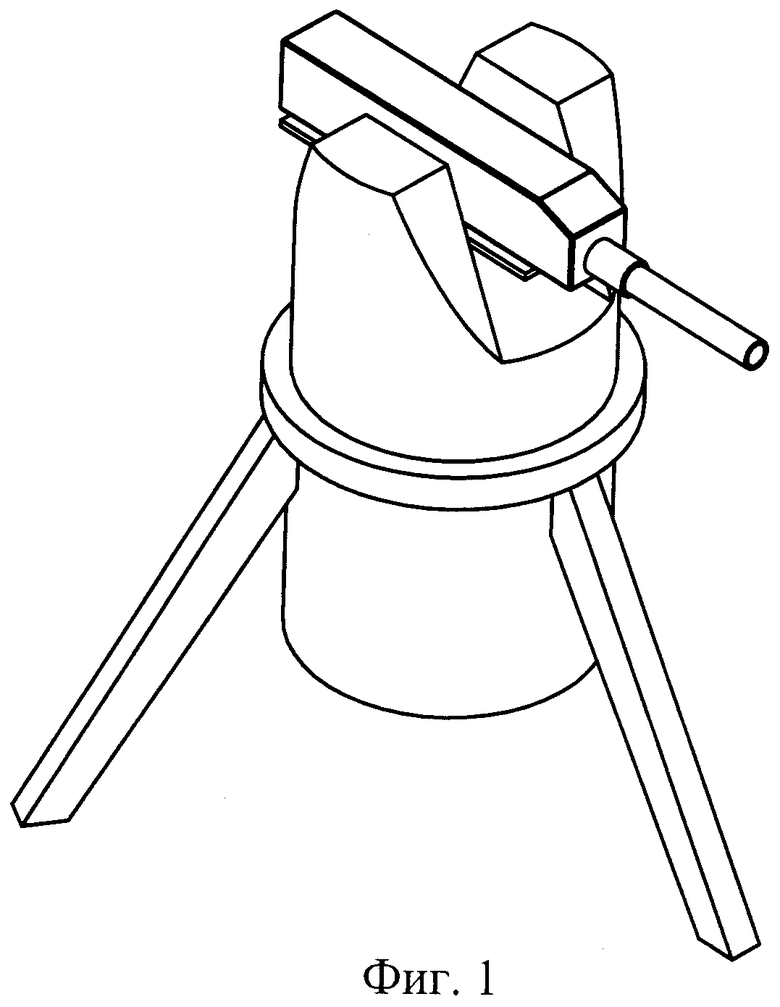
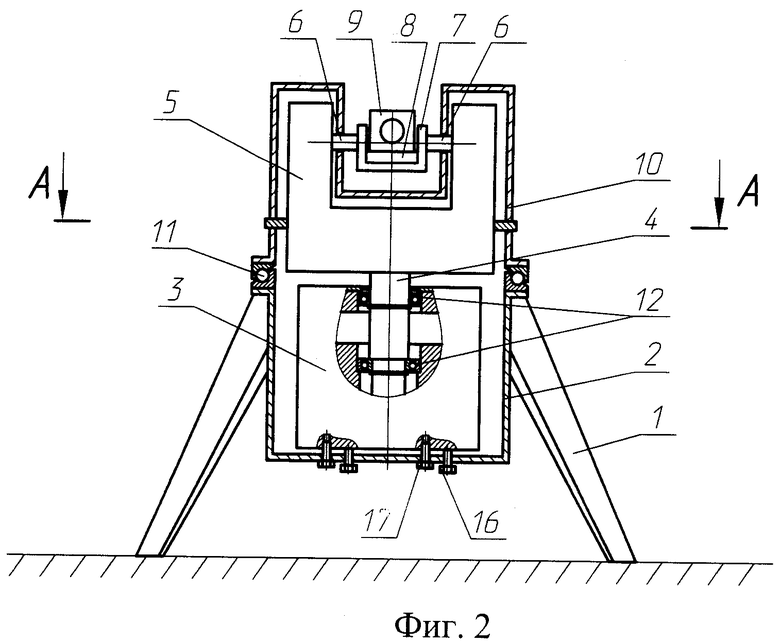
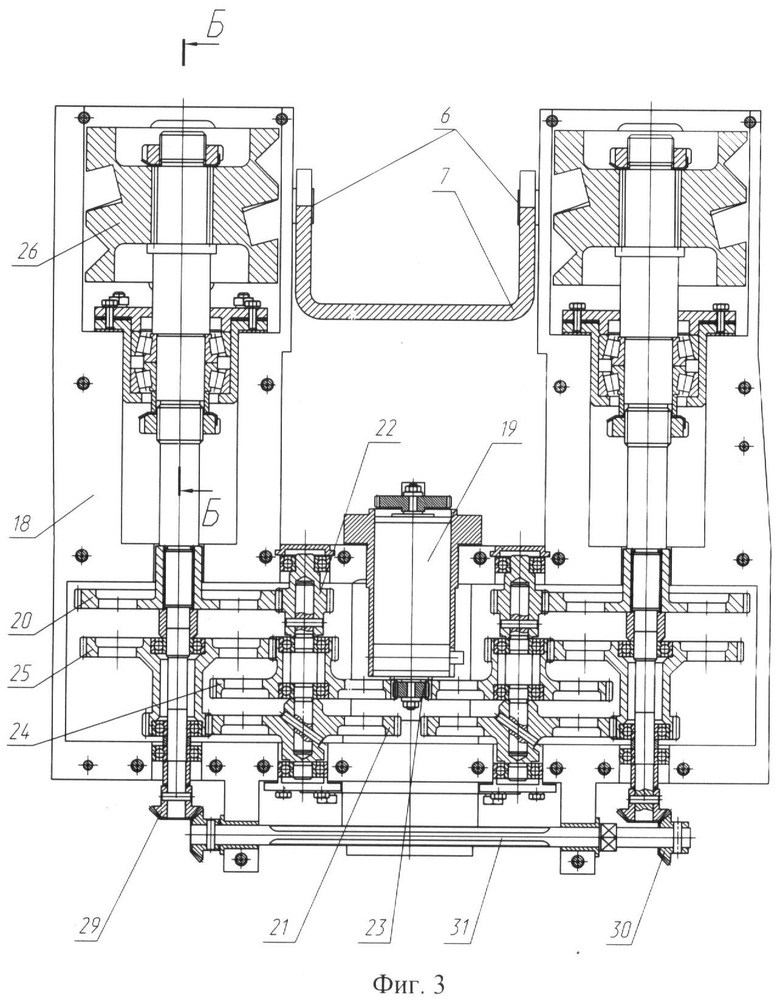
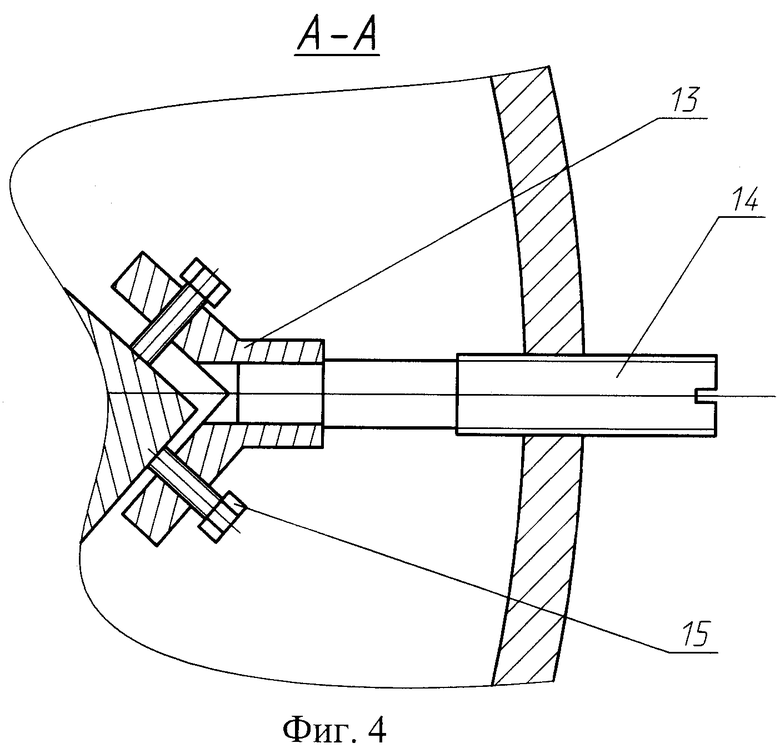
Сущность изобретения поясняется чертежами, где на фиг.1 представлен общий вид комплекса; на фиг.2 - продольный разрез комплекса; на фиг.3 - исполнительный механизм привода вертикального наведения; на фиг.4 - разрез А-А; на фиг.5 - разрез Б-Б; на фиг.6 - кинематическая схема исполнительного механизма привода вертикального наведения; на фиг.7 - исполнительный механизм привода горизонтального наведения; на фиг.8 - кинематическая схема исполнительного механизма привода горизонтального наведения.
Комплекс представляет собой конструкцию, состоящую из отдельных блоков, связанных между собой регулировочными и установочными элементами. Опоры 1 неподвижной части станка 2 служат опорой комплекса. На неподвижной части станка 2 закреплен привод горизонтального наведения 3. На конце выходного вала 4 привода горизонтального наведения 3 установлен привод вертикального наведения 5. На соосных выходных валах 6 привода вертикального наведения 5 закреплена качалка 7. К качалке 7 крепится постель оружия 8 с оружием 9. Подвижная часть станка 10 соединяется с неподвижной частью станка 2 с помощью подшипника 11. Для обеспечения соосности подшипников 12 выходного вала привода горизонтального наведения 3 и подшипника 11 и передачи крутящего момента от привода вертикального наведения 5 на подвижную часть станка 10 служат следующие регулирующие элементы: сухари 13, нажимной винт 14 и регулировочные винты 15. Для регулировки положения приводов горизонтального и вертикального наведения относительно станка и для закрепления привода горизонтальной наводки имеются отжимные винты 16 и зажимные винты 17.
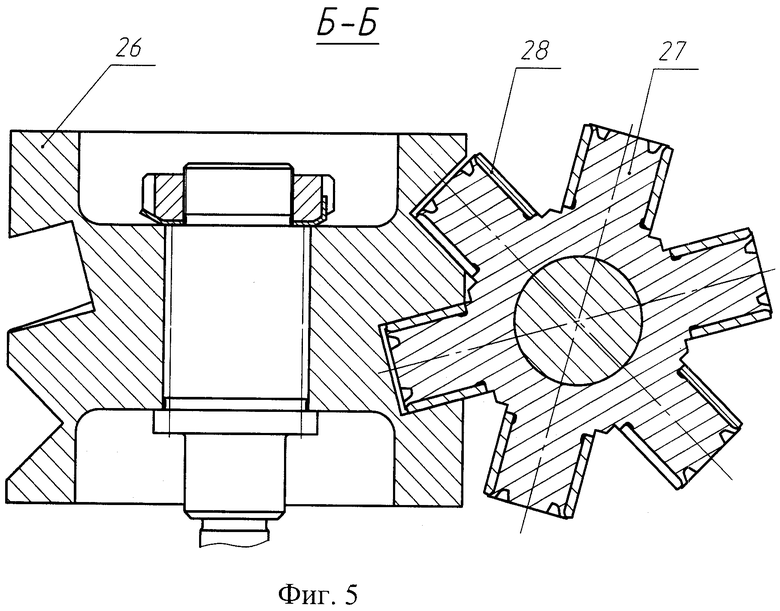
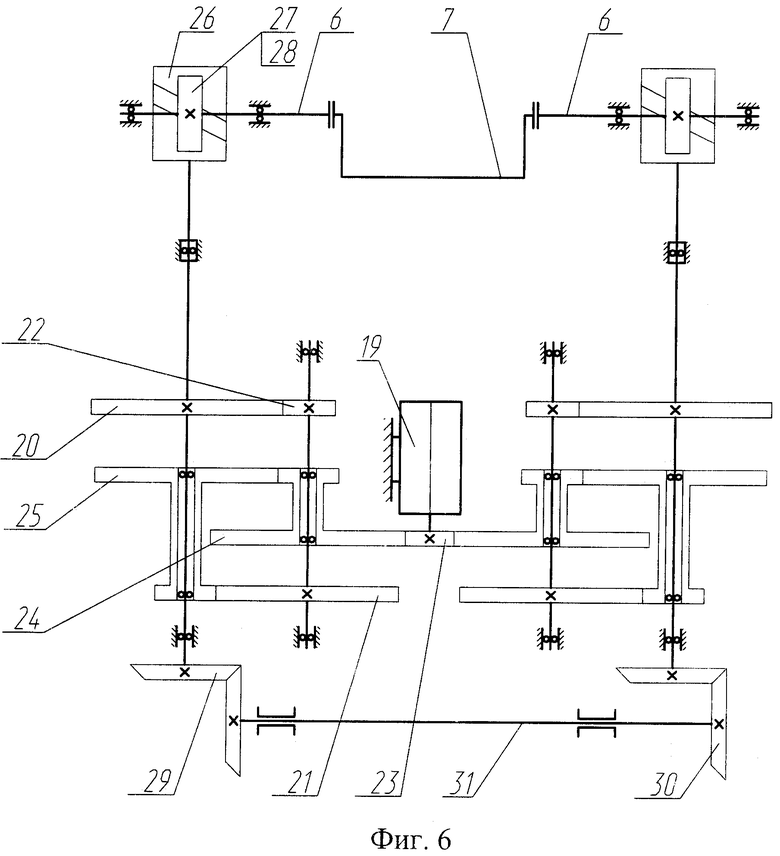
Исполнительный механизм привода вертикального наведения 5 в предложенном варианте исполнения представляет собой раздвоенный пятиступенчатый редуктор, заключенный в корпус 18, который предназначен для передачи вращения от электродвигателя 19 на качалку 7. Первые четыре ступени каждой ветви редуктора содержат прямозубые цилиндрические передачи, состоящие из зубчатых колес 20, 21, шестерен 22, 23 и блоков зубчатых колес 24, 25. Последней (пятой) ступенью каждой ветви редуктора является кулачково-роликовый механизм с радиальным расположением роликов. Механизм состоит из кулачка 26, звездки 27 и роликов 28. Кулачково-роликовый механизм является самотормозящим механизмом, что позволяет воспринимать активную составляющую от импульса отдачи оружия без введения дополнительных тормозящих (блокировочных) устройств. Выходные валы 6 ветвей редуктора расположены соосно и жестко связаны с цапфами качалки 7. Предпоследняя ступень редуктора снабжена торсионом, служащим для увеличения точности наведения оружия. Он состоит из двух пар конических зубчатых передач 29, 30, закрепленных на предпоследних валах и скрепленных между собой торсионным валом 31. Торсионный вал 31 предварительно закручивается на угол, обеспечивающий выбор бокового зазора в обеих ветвях редуктора, что повышает точность отработки заданных углов наведения. Таким образом, при прямой подаче ведущей является одна ветвь редуктора, а при реверсе - другая.
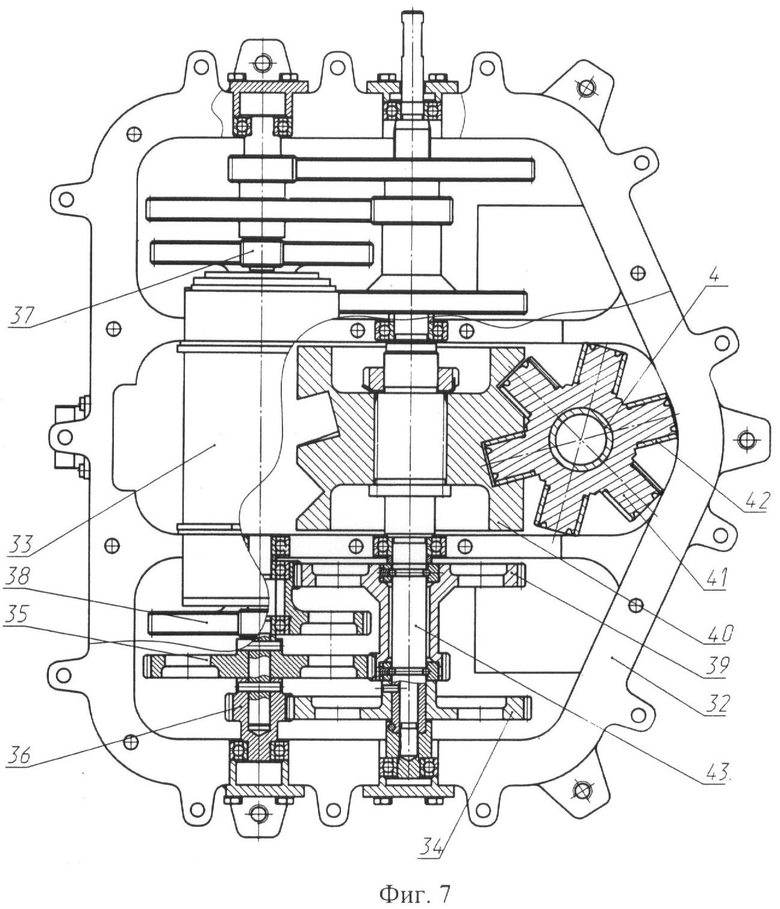
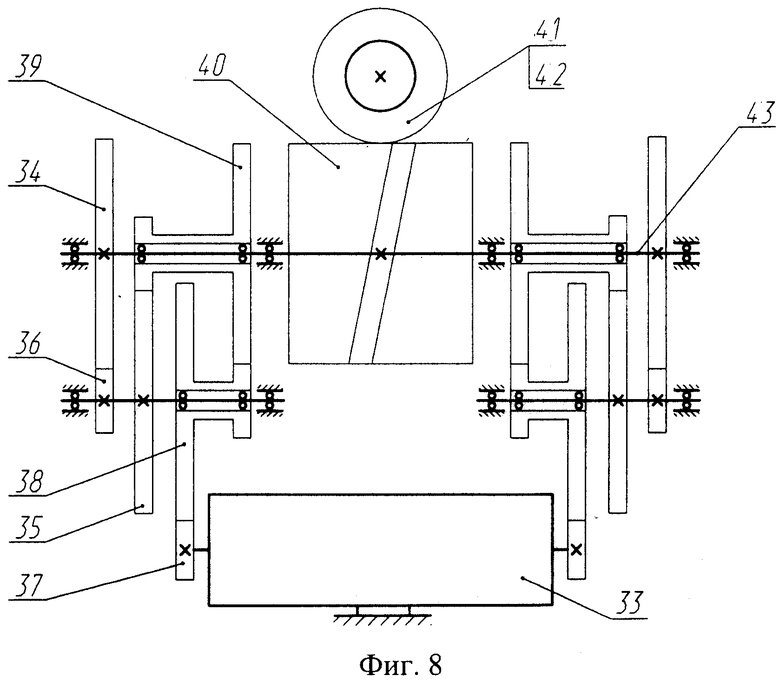
Исполнительный механизм привода горизонтального наведения 3 в предложенном варианте исполнения представляет собой раздвоенный пятиступенчатый редуктор, заключенный в корпусе 32, который предназначен для передачи вращения от электродвигателя 33 на выходной вал 4. Первые четыре ступени каждой ветви редуктора содержат прямозубые цилиндрические передачи, состоящие из зубчатых колес 34, 35, шестерен 36, 37 и блоков зубчатых колес 38, 39. Пятая ступень редуктора является общей для обеих ветвей и представляет собой кулачково-роликовый механизм с радиальным расположением роликов. Механизм по своему устройству аналогичен кулачково-роликовому механизму привода вертикального наведения 5 и состоит из кулачка 40, звездки 41 и роликов 42. Для повышения точности наведения зубчатые колеса 34 четвертой ступени редуктора установлены на торсионном валу 43. Торсионный вал 43 закручивается на угол, обеспечивающий выбор бокового зазора в обеих ветвях редуктора.
Комплекс работает следующим образом. Вращающий момент от электродвигателя 33 передается по обеим ветвям редуктора через зубчатые колеса 34, 35, шестерни 36,37, блоки зубчатых колес 38, 39 и кулачок 40 со звездкой 41 на выходной вал 4 привода горизонтального наведения 3, который сообщает вращательное движение в горизонтальной плоскости установленному на его конце приводу вертикального наведения 5 и связанными с приводом вертикального наведения 5 подвижной части станка 10 качалке 7, постели оружия 8 и оружию 9. Таким образом осуществляется горизонтальное наведение.
При вертикальной наводке вращающий момент от электродвигателя 19 передается по обеим ветвям редуктора через зубчатые колеса 20, 21, шестерни 22, 23, блоки зубчатых колес 24, 25 и кулачки 26 со звездками 27 на соосные выходные валы 6 привода вертикального наведения 5, которые, будучи жестко связанными с качалкой 7, сообщают вращательное движение в вертикальной плоскости постели оружия 8 и оружию 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СПАРЕННЫМ ПУЛЕМЕТОМ | 2015 |
|
RU2595055C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ ПРЕОБРАЗУЮЩИЙ МЕХАНИЗМ ПРИВОДА СТАНКА-КАЧАЛКИ | 2005 |
|
RU2303182C2 |
| РЕДУКТОР СТАНКА-КАЧАЛКИ | 1993 |
|
RU2075673C1 |
| Боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня | 2024 |
|
RU2829896C1 |
| БОЕВОЕ ОТДЕЛЕНИЕ БРОНИРОВАННОЙ МАШИНЫ | 2003 |
|
RU2258889C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СПАРЕННЫМ ПУЛЕМЕТОМ | 2016 |
|
RU2642222C2 |
| ФОРТИФИКАЦИОННАЯ УСТАНОВКА | 1992 |
|
RU2079092C1 |
| СТАНОК-КАЧАЛКА | 2006 |
|
RU2308616C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ДЛИННОХОДОВОЙ СТАНОК-КАЧАЛКА | 2004 |
|
RU2267649C2 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
Комплекс автоматического оружия содержит станок с подвижной и неподвижной частями, постель для оружия и приводы горизонтального и вертикального наведения. Исполнительные механизмы горизонтального и вертикального наведения выполнены в виде раздвоенных пятиступенчатых редукторов, а привод горизонтального наведения закреплен на неподвижной части станка. На выходном валу привода горизонтального наведения установлен привод вертикального наведения, связанный с подвижной частью станка, а на выходных валах привода вертикального наведения установлена качалка с элементами крепления постели оружия. Каждая ветвь двухветвийного редуктора привода вертикально наведения и двухветвийный редуктор привода горизонтального наведения могут заканчиваться кулачково-роликовым механизмом. Упрощается конструкция и обеспечивается возможность ее унификации для различных видов вооружения. 2 з.п. ф-лы. 8 ил.
1. Комплекс автоматического оружия, содержащий станок с подвижной и неподвижной частями, постель для оружия и приводы горизонтального и вертикального наведения, отличающийся тем, что исполнительные механизмы приводов горизонтального и вертикального наведения выполнены в виде раздвоенных редукторов, привод горизонтального наведения закреплен на неподвижной части станка и на его выходном валу установлен привод вертикального наведения, связанный с подвижной частью станка, а на выходных валах привода вертикального наведения установлена качалка с элементами крепления постели оружия.
2. Комплекс по п.1, отличающийся тем, что каждая ветвь двухветвийного редуктора привода вертикального наведения заканчивается кулачково-роликовым механизмом, а предпоследняя ступень редуктора снабжена торсионным валом, закрученным таким образом, что при прямой передаче ведущей является одна ветвь редуктора, а при реверсе - другая.
3. Комплекс по п.1, отличающийся тем, что двухветвийный редуктор привода горизонтального наведения заканчивается кулачково-роликовым механизмом, а ступени ветвей подвода к валу кулачка связаны между собой торсионом.
| БОЕВАЯ УСТАНОВКА | 2000 |
|
RU2179695C2 |
| РАКЕТНО-АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 1996 |
|
RU2112193C1 |
| БОЕВАЯ УСТАНОВКА | 1999 |
|
RU2169329C1 |
| БОЕВАЯ УСТАНОВКА | 2000 |
|
RU2179695C2 |
| RU 2055298 C1, 27.02.1996 | |||
| RU 2003120833 A, 10.01.2005. | |||

