Изобретение относится к области военной техники, а именно к автоматизированному вооружению с дистанционным управлением, которое устанавливается на робототехнические комплексы, и может быть использовано для обнаружения и огневого поражения различных целей при боевых действиях.
Стрелковое оружие с дистанционным управлением [1] , содержащее устройство с тягой изменяемой длины, соединенной со штоком электромагнитного реле автомобильного стартера и рычагом, который упирается в спусковой крючок стрелкового оружия.
Устройство автоматического управления спаренным пулеметом [2], содержащее станок с подвижной и неподвижными частями, установку с оружием, размещенную на подвижной части, закрепленный на неподвижной части привод горизонтального наведения, механизм вертикального наведения, кинематически связывающий привода с установкой. Установка разделена на первую и вторую части, соединенные соответственно через первую и вторую части механизма вертикального наведения с первым и вторым приводами этого механизма, каждая часть которого выполнена в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, жестко закрепленного на оси одного червяка, размещенного на подвижной части и взаимодействующего с зубчатым колесом, жестко связанным с разделенной частью установки, и сопряженного с другим червяком, ось которого совмещена с вертикальной осью поворота подвижной части, при этом стволы соответственно размещены на первой и второй частях установки.
Боевой модуль АУ-220М с артиллерийской установкой для размещения на военной технике [3], содержащий боевой модуль с артиллерийской установкой для размещения на подвижных боевых средствах, состоящий из бронированной башни с артиллерийским орудием, боеукладки, системы заряжания и прицельно-наблюдательного комплекса, 57-мм автоматической пушки, системы управления огнем, стабилизатора вооружения.
Дистанционно-управляемый боевой модуль [4], содержащий механический модуль и размещенные в нем: пулемет крупного калибра, система питания, состоящая из расположенного внутри механического модуля съемного магазина с лентой, снаряженной патронами, и тракта питания пулемета.
Боевой роботизированный комплекс [5], содержащий легкобронированную машину с установленным на ней двигателем, трансмиссией, ходовой частью с движителем, вооружением и аппаратурой управления.
Наиболее близким по технической сущности является боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня [6], содержащий легкобронированную машину с установленным на ней двигателем, трансмиссией, ходовой частью с движителем, вооружением и аппаратурой управления, отличающийся тем, что штатная рама автоматического гранатомета АГС-17 жестко закреплена в верхней части робототехнического комплекса, а в торцевой части автоматического гранатомета АГС-17 расположен шаговый двигатель, выходным звеном которого является червячный вал, который в свою очередь через червячное колесо и шестерню соединен с шестерней вертикального наведения, также в торцевой части автоматического гранатомета АГС-17 смонтирован блок электроспуска, включающий корпус с электромагнитом, якорь и двуплечий рычаг, при этом шаговый двигатель и блок электроспуска соединены и дистанционно управляются электронным блоком управления.
Недостатками данного изобретения являются следующее:
• отсутствие горизонтального наведения боевого модуля по причине использования штатной станины на жестком креплении и отсутствие ленто- и гильзоулавливателя;
• сложность и ненадежность конструкции по передаче усилия, создаваемого электромагнитом при перемещении на спусковую пластину АГС-17.
Задача предполагаемого изобретения заключается:
• в применении турели новой конструкции, для установки АГС-17, позволяющей осуществлять горизонтальное наведение, а также обладающее специальным коробом с выделенным хранилищем боезапаса, ленто- и гильзоулавливателем;
• упрощение конструкции и повышение ее надежности за счет замены двуплечевого рычага на металлический трос, который вместо передачи усилия на спусковую пластину, передает его напрямую на спусковой механизм.
Технический результат достигается за счет того, что турель, разработанная для АГС-17, крепится с помощью болтовых соединений к ступице, установленной на робототехническом комплексе, поворот которой осуществляет за счет перемещения актуатора линейного привода, закрепленного в горизонтальном положении на корпусе робототехнического комплекса, для регулирования вертикального положения АГС-17 используются два актуатора линейного привода, основание которых жестко закреплено к турели, а движущиеся части прикреплены к верхней части постели, регулируя положение постели в вертикальной плоскости. Для предотвращения попадания ленты и гильз на подвижные элементы робототехнического комплекса под постелью АГС-17 устанавливается специальный короб, содержащий ленто- и гильзоулавливатель, а также хранилище боезапаса, обеспечивая более удобную и быструю загрузку боекомплекта. В левой части турели смонтирован блок электроспуска, включающий корпус с электромагнитом, якорь, металлический трос соединяющий его с шепталом ударно-спускового механизма, тем самым, обеспечивая прямую передачу силы от перемещения электромагнита для приведения в действие ударно-спускового механизма, при этом актуаторы вертикального, горизонтального наведения и блок электроспуска соединены и дистанционно управляются оператором.
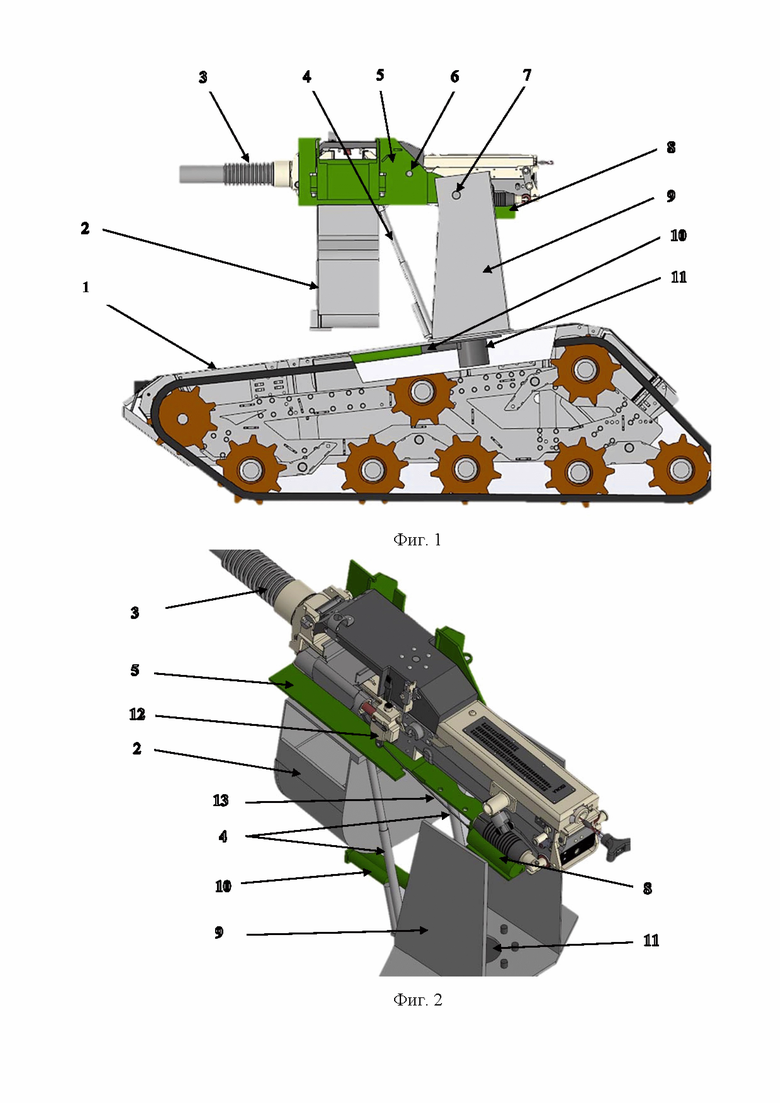
На фиг.1 представлен общий вид боевого модуля робототехнического комплекса с дистанционным наведением и ведением огня;
Фиг. 2 - общий вид боевого модуля робототехнического комплекса с блоком электроспуска;
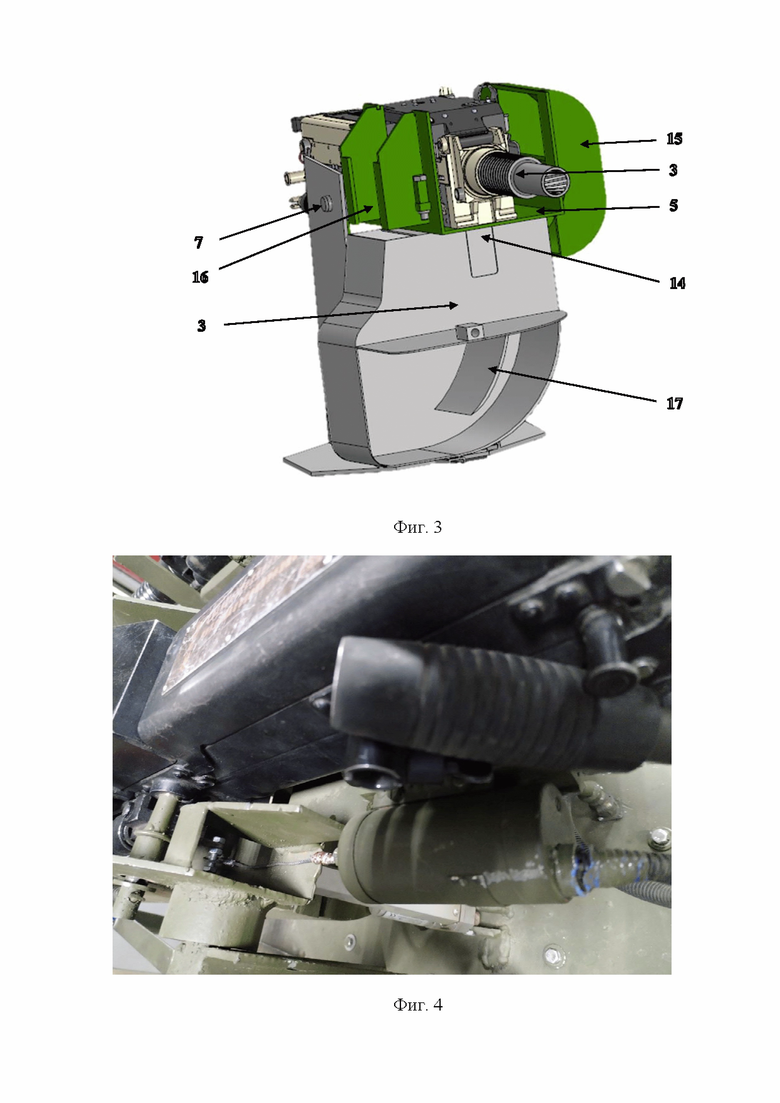
Фиг. 3 - коробчатый магазин для хранения боезапаса, ленто- и гильзосборником
Фиг. 4 - фотография физического исполнения боевого модуля с электроспуском.
Фиг. 5 - фотография физического исполнения боевого модуля с коробчатым магазином для хранения боезапаса, ленто- и гильзоулавливателем.
Заявленный боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня содержит робототехнический комплекс, включающий дистанционно-управляемую машину 1 с установленным на ней двигателем, трансмиссией, ходовой частью с движителем, вооружением и аппаратурой управления, на котором установлена ступица 11 к которой крепится турель 9, на валах вращения 7 которых размещена постель 5 под установку на нее с помощью пальцев-фиксаторов 6 автоматического гранатомета 3 АГС-17, снизу к постели крепится специальный короб 2, внутри которого размещают ленту с боеприпасами ВОГ17, заряженная лента через лентоподатчик 16 подается в 3 АГС-17, далее стрелянные гильзы через отверстие 14, а пустая лента через лентоулавливатель 15 попадают в специальный короб 2 внутри которого размещена перегородка 17, в левой задней части турели 9 смонтирован блок электроспуска 8, включающий корпус с электромагнитом, якорь, металлический трос 13 соединяющий его с шепталом ударно-спускового механизма 12, для вертикального и горизонтального наведения используются актуаторы 4 и 10 линейного привода.
Заявленный боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня работает следующим образом.
На верхнюю часть дистанционно-управляемой машины 1 устанавливается ступица 11, на которой стоит турель 9, на валах вращения 7 размещена постель 5, с помощью пальцев-фиксаторов 6 установятся на нее автоматический гранатомет 3 АГС-17, снизу к постели 5 крепится специальный короб 2, внутри которого размещают ленту с боеприпасами ВОГ17, лента с выстрелами по направляющей лентоподатчика 16 передвигается в приемник 3 АГС-17, далее отраженные гильзы через отверстие 14, а пустая лента через лентоулавливатель 15, попадают в коробчатый магазин внутри которого размещена перегородка 14, не позволяющая смешаться выстрелам, в левой задней части турели 9 смонтирован блок электроспуска 8, включающий корпус с электромагнитом, якорь и металлический трос 13 соединяющий его с шепталом ударно-спускового механизма 12, для вертикального и горизонтального наведения используются актуаторы 4 и 10 линейного привода.
При наведении на цель, оператор управляет механизмами вертикального 4 и горизонтального 10 наведения, а также блоком электроспуска 8, а именно инициирует перемещение электромагнита с якорем, который через трос 13 обеспечивает механическое воздействие на шептало ударно-спускового механизма автоматического гранатомета 3 АГС-17.
Источники информации
1. Патент РФ №2460027 опубл. 27.08.2012 г.
2. Патент РФ №2642222 опубл. 24.01.2018 г.
3. Патент RU 55117 U1, Опубл. 27.07.2006.
4. Патент RU 2715254 U1, Опубл. 26.02.2020.
5. Патент RU 2584766, МПК F41H 7/00 от 27.05.2015.
6. Патент RU 2813397 от 12.02.24.
| название | год | авторы | номер документа |
|---|---|---|---|
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
| БОЕВОЙ МОДУЛЬ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА С ДИСТАНЦИОННЫМ НАВЕДЕНИЕМ И ВЕДЕНИЕМ ОГНЯ | 2023 |
|
RU2813397C1 |
| Боевой модуль робототехнического комплекса с универсальным ложементом | 2024 |
|
RU2838709C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2828680C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2016 |
|
RU2629688C1 |
| АВТОМАТИЗИРОВАННЫЙ ДИСТАНЦИОННО-УПРАВЛЯЕМЫЙ НАБЛЮДАТЕЛЬНО-ОГНЕВОЙ КОМПЛЕКС | 2018 |
|
RU2718622C1 |
| МОДУЛЬНАЯ АВТОМАТИЧЕСКАЯ ОГНЕВАЯ ТОЧКА АЗ-1 | 2023 |
|
RU2831239C1 |
| Комплекс вооружения танка | 2023 |
|
RU2818147C1 |
| Боевой модуль с дистанционным управлением | 2018 |
|
RU2686896C1 |
| Устройство для дистанционной стрельбы | 2024 |
|
RU2839417C1 |

Изобретение относится к автоматизированному вооружению с дистанционным управлением, которое устанавливается на робототехнические комплексы. Турель, разработанная для АГС-17, крепится с помощью болтовых соединений к ступице, установленной на робототехническом комплексе, поворот турели осуществляется за счет перемещения актуатора линейного привода, закрепленного в горизонтальном положении на корпусе робототехнического комплекса. Для регулирования вертикального положения АГС-17 используются два актуатора линейного привода, основание которых жестко закреплено к турели, а движущиеся части прикреплены к верхней части постели. Под постелью АГС-17 устанавливается короб, содержащий ленто- и гильзоулавливатель, а также хранилище боезапаса. В левой части турели смонтирован блок электроспуска, включающий корпус с электромагнитом, якорь, металлический трос, соединяющий его с шепталом ударно-спускового механизма. Актуаторы вертикального, горизонтального наведения и блок электроспуска соединены и дистанционно управляются оператором. Достигается разработка компактного и простого в эксплуатации и изготовлении боевого модуля робототехнического комплекса с дистанционным наведением и ведением огня. 5 ил.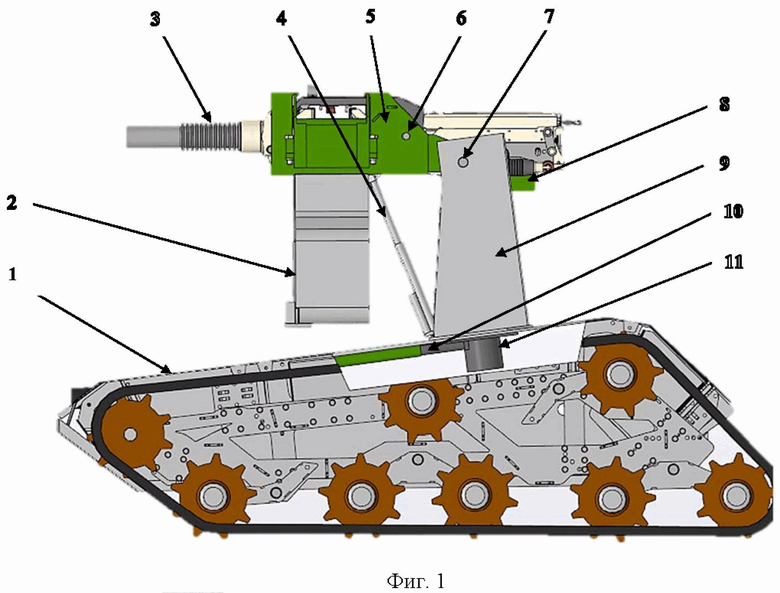
Боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня, содержащего легкобронированную машину с установленным на ней двигателем, трансмиссией, ходовой частью с движителем, вооружением и аппаратурой управления, отличающийся тем, что турель, разработанная для АГС-17, крепится с помощью болтовых соединений к ступице, установленной на робототехническом комплексе, поворот которой осуществляется за счет перемещения актуатора линейного привода, закрепленного в горизонтальном положении на корпусе робототехнического комплекса, для регулирования вертикального положения АГС-17 используются два актуатора линейного привода, основание которых жёстко закреплено к турели, а движущиеся части прикреплены к верхней части постели, регулируя положение постели в вертикальной плоскости, при этом для предотвращения попадания ленты и гильз на подвижные элементы робототехнического комплекса под постелью АГС-17 устанавливается короб, содержащий ленто- и гильзоулавливатель, а также хранилище боезапаса, обеспечивающее более удобную и быструю загрузку боекомплекта, также в левой части турели смонтирован блок электроспуска, включающий корпус с электромагнитом, якорь, металлический трос, соединяющий его с шепталом ударно-спускового механизма, тем самым обеспечивая прямую передачу силы от перемещения электромагнита для приведения в действие ударно-спускового механизма, при этом актуаторы вертикального, горизонтального наведения и блок электроспуска соединены и дистанционно управляются оператором.
| WO 2009078940 A1, 25.06.2009 | |||
| CN 206200979 U, 31.05.2017 | |||
| БОЕВОЙ МОДУЛЬ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА С ДИСТАНЦИОННЫМ НАВЕДЕНИЕМ И ВЕДЕНИЕМ ОГНЯ | 2023 |
|
RU2813397C1 |
| ОРУЖЕЙНАЯ УСТАНОВКА | 2009 |
|
RU2419056C1 |
| МЕХАНИЧЕСКИЙ ПРИВОД К НАГНЕТАТЕЛЮ АВИАЦИОННЫХ МОТОРОВ | 1939 |
|
SU59020A1 |

