2. Схват манипулятора по п. 1, отличающийся тем, что торсион выполнен плоским с переменной по длине жесткостью, фиксатор выполнен в виде диска с центральны пазом для размещения торсиона, с канавкой на наружной поверхности для захода стопора и с .резьбой, а на внутренней поверхности корпуса выполнена ответная резьба для образования резьбового соединения корпус-фиксатор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| Очувствленный схват манипулятора | 1979 |
|
SU804427A1 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Манипулятор | 1978 |
|
SU766854A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |

I. ОЧУВСТВЛЕННЫЙ СХВАТ МАНИПУЛЯТОРА, содержащий губки, связанные с приводом их перемещения через редуктор и дифференциал, устройство для измеречия усилия, блок задания усилия и блок управления, отличающийся тем, что, с целью расщирения функциональных возможностей за счет обеспечения захвата деталей различной жесткости как за внутреннюю, так И за наружную поверхности, устройство для измерения усилия выполнено в виде торсиона, установленного в корпусе с возожностью поворота вокруг оси и кинематически связанного одни.м концом с дифференциалом, фиксатора торсиона от проворота со стопором, установленного в корпусе с возможностью перемещения вдоль торсиона, и датчика угла поворота торсиона, установленного на его конце, связанном с днфференциалом.
Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых для выполнения подъемно-транспортных, монтажно-сборочных и технологических операций в дистанционных манипуляторах, работающих в экстремальных условиях.
Известен очувствленный схват манипулятора, содержащий губки, связанные с приводом их перемешення через редуктор и дифференциал, устройство для измерения усилий, блок задания усилия и блок управления 1.
Однако устройство для нзМерення усилия может быть использовано только при захвате манипулируемого объекта за наружную поверхность и не обеспечивает работу схвата на разжим губок при захвате объекта за внутреннюю поверхность. Кроме того, из-за использования в устройстве цилиндрической пружины оно обладает низкой точностью измерения усилия вследствие неопределенности положения пружины в пространстве при ее закручивании, что ограничивает его функциональные возожности.
Цель изобретения - расширение функциональных возможностей схвата.
Поставленная цель достигается тем, что в очувствленном схвате манипулятора, содержащем губки, связанные с приводом их перемещения через редуктор и дифференциал, устройство для измерения усилия, блок задания усилий и блок управления, устройство для измерения усилия выполнено в виде торсиона, установленного в корпусе с возможностью поворота вокруг оси и кинематически связанного одним концом с дифференциалом, фиксатора торсиона от проворота со стопором, установленного в корпусе с возможностью перемещения вдоль торсиона, и датчика угла поворота торсиона, установленного на его конце, связанном с дифференциалом.
Кроме того, торсион выполнен плоским с переменной по длине жесткостью, фиксатор выполнен в виде диска с центральным пазом для размещения торсиона, с канавкой на наружной поверхности для захода стопора и с резьбой, а на внутренней
поверхности корпуса выполнена ответная резьба для образования резьбового соединения корпус-фиксатор.
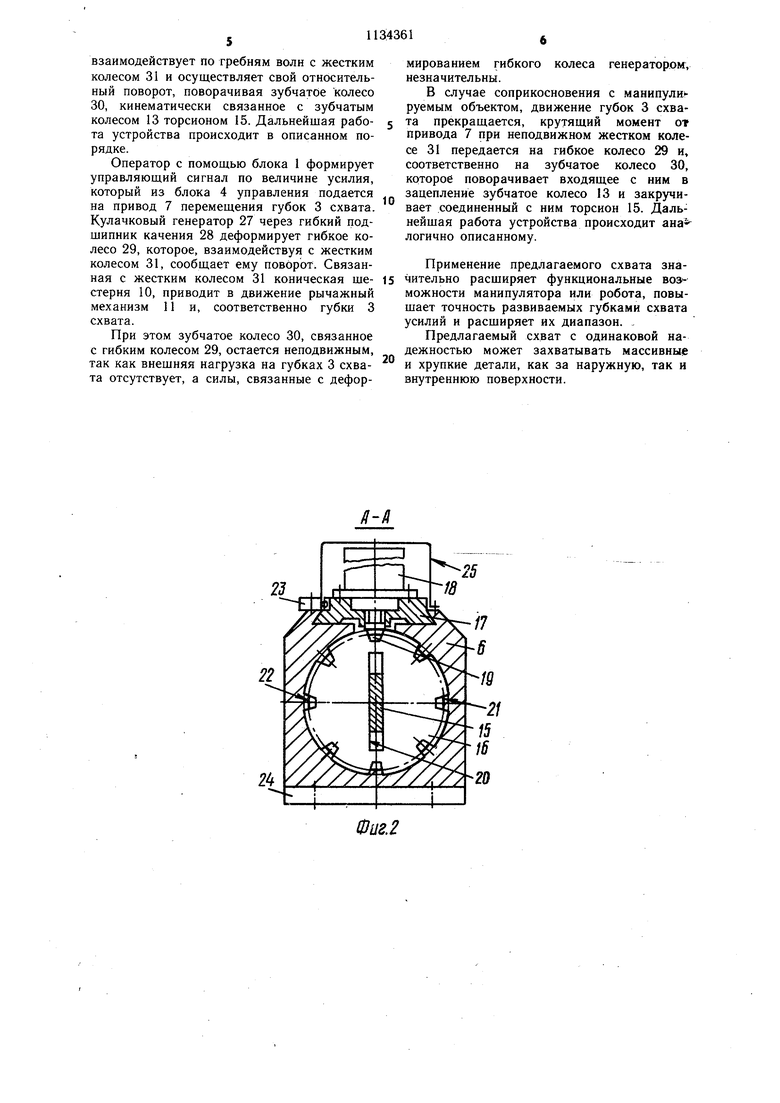
На фиг. 1 изображен очувствленный схват манипулятора, разрез; на фиг. 2 - Iразрез А-А на фиг. 1; на фиг. 3 - очувствленный схват манипулятора, разрез (с дифференциальной волновой зубчатой передачей).
Очувствленный схват манипулятора
0 содержит блок 1 задания усилия с регулирующим элементом 2, который для днстанционно-управляемых манипуляторов может быть выполнен, например, в виде потенций метра, в зависиости от положения которого
5 изменяется соответственно диапазон усилий, устанавливаемый на губках 3 схвата. Блок 1 электрически связан через блок 4 управления С исполнительным механизмом 5, состоящим из корпуса 6, в котором смонтирован приQ вод 7 перемещения губок схвата, муфты 8 односторонней передачи крутящего момента и механической передачи, выполненной в виде редуктора с дифференциалом на выходе, например, в виде дифференциального планетарного механизма, водило 9 которого
5 при помощи конической- шестерни Юн рычажного механизма 11 соединено с губками 3 схвата, а центральное колесо 12 внутренним зацепленнем при помощн зубчатого колеса 13 соединено с датчиком 14 угла
поворота торсиона 15, устройства для нзмерен.ия усилия, которое содержит фиксатор 16 торсиона 15 от проворота. Фиксатор снабженстопором 17 с электромагнитным приводом 18, установленным на ползуне 19.
5 Фиксатор 16 представляет собой диск с центральным пазом 20 для размещения торсиона, причем на наружной поверхиости диска выполнены канавки 21 для разме щения стопора 17 и резьба.
На внутренней поверхиости 22 корпус выполнена ответная резьба .для перемен щения фиксатора 16 при вращении торсиона 15. Перемещение фиксатора 16 ограничено конечными выключателями 23, установленными на корпусе 6, располо- женном на конце рычага 24 манипулятора. при этом фиксатор 16, ползун 19. и электро агиитный привод 18 закрыты кожухом 25. В варианте исполнения очувствленного схвата манипулятора с механической передачей в виде редуктора с дифференциальной волновой зубчатой передачей на выходе (фиг. 3) привод 7 перемещения губок 3 схвата соединен с первой ступенью редуктора 26, на выходном валу которой установлен кулачковый генератор 27 волн с надетым на него гибким подшипником качения 28 Кулачковый геиератор 27 волн через гиб.кий подшипник 28 взаимодействует с гибioiM колесом 29, выполненным в виде кольца, переходящего в гибкий цилиндр. На недеформируемом конце гибкого цилиндра выполнено зубчатое колесо 30, которое установлено на подшипниках н кинематически связано с зубчатым колесом 13 и торсионом 15. Колесо 29 находится в зацеплении с жестким колесом 31, име|бщим такой же щаг зацепления, но большее число зубьев и связанным с помощью конической шестерни Ю и рычажного механизма 11 с губками схвата 3. Очувствленный схват манипулятора работает следующим образом. В случае использования очувствленного схвата в конструкции дистанционно управляемого манипулятора оператор с помощью регулирующего элемента 2 устанавливает необходимый диапазон усилий, который может быть передан на губки схвата, например, с помощью поворота ручки потенциометра. Сигнал с регулирующего элемента 2 поступает в блок 4 управления, который на основании этого сигнала выдает управляющее воздействие на привод 7 перемещения губок 3 схвата, а также на электромагнитпривода 18, который, перемещая стопор 17, освобождает фиксатор 16. Установку необходимого диапазона усилий производят при сжатых до упора Губках 3 схвата или же при разведенных (также до упора), т.е. в исходном состоянии губок 3 схвата. Тогда под действием управляющего, воздействия с регулирующего элемента 2 и блока 4 управления привод 7 перемещения губок 3 схвата поворачивает центральное колесо 12, которое через зубчатое колесо 13 начинает вращать торсион 15 и соответственно датчик 14 угла поворота. Торсион 15, свободно вращаясь в подшипниках, приводит во вращение фиксатор 16, который, поворачиваясь вокруг оси торсиона, перемещается по резьбе на внутренней поверхности 22 в ту или иную сторону. Фиксатор 16, перемещаясь, двигает за обой кинематически связанный с ней полQiyH 19, который перемещается в корпусе 6 чЗмувствленного схвата. В том случае, когда сигнал с датчика 14 угла поворота торсиона, поступающий в блок 4 управления, достигнет заданной величины, обусловленной регулирующим элементом 2 блока 1, блок 4 выдает сигнал на отключение привода 7, включение муфты 8 и стопорение фиксатора 16. Электромагнит привода 18 обесточивается и стопор 17 под действием пружины сжатия западает в канавку фиксатора 16. После этого оператор, с помощью блока 1 формирует сигнал управления по величине усилия, который через блок 4 управления подается на привод 7 перемещения губок 3 схвата. В результате поворачиваются водило 9 дифференциального планетарного механизма и коническая шестерня 10, приводящая в движение рычажный механизм 11 и соответственно губКи 3 схвата. Губки 3 схвата перемещаются навстречу друг другу. При этом центральное колесо 12 с внутренним зацеплением остается неподвижным, так как внешняя нагрузка на губках схвата отсутствует. В случае соприкосновения с манипулируемым объектом движение губок 3 схвата прекращается. За счет того, что крутящий момент от привода 7 передается на центральное колесо 12 с внутренним зацеплением, колесо 12 поворачивает входящее с ним в зацепление зубчатое колесо 13 и закручивает соединенный с ним торсион 15. При этом поворачивается вал датчика 14 угла поворота торсиона и сигнал с него поступает в блок 4 управления, где происходит его сравнение с сигналом управления, поступившим с блока 1. Когда этот сигнал достигнет величины сигнала управления, привод 7 отключается и муфта 8 односторонней передачи момент фиксирует схват в зажатом состоянии, что позволяет удерживать манипулируемый предмет схвата длительное время без посторонней энергии. При использовании в очувствленном схвате дифференциальной волновой зубчатой передачи при установке необходимого диапазона усилий под действием управляющего воздействия с регулирующего элемента 2 и блока 4 привод 7 перемещения губок схвата начинает вращать выходной вал первой ступени редуктора 26, на котором установлен кулачковый генератор 27 волн. Так волновая передача относится к предварительно нагруженным конструкциям. То поворот гибкого колеса 29 и связанного с ним зубчатого колеса 30 жесткого колеса 31 происходит без деформации гибкого колеса 29 до тех пор, пока губки 3 захвата не сожмутся или разведутся до упора. Затем кулачковый генератор 27 волн через подшипник качения 28 деформирует гибкое колесо 29, которое в свою очередь
взаимодействует по гребням волн с жестким колесом 31 н осуществляет свой относительный поворот, поворачивая зубчатое колесо 30, кинематически связанное с зубчатым колесом 13 торсионом 15. Дальнейшая работа устройства происходит в описанном порядке.
Оператор с помощью блока 1 формирует управляющий сигнал по величине усилия, который из блока 4 управления подается на привод 7 перемещения губок 3 схвата. Кулачковый генератор 27 через гибкий подшипник качения 28 деформирует гибкое колесо 29, которое, взаимодействуя с жестким колесом 31, сообщает ему поворот. Связанная с жестким колесом 31 коническая шестерня 10, приводит в движение рычажный механизм 11 и, соответственно губки 3 схвата.
При этом зубчатое колесо 30, связанное с гибким колесом 29, остается неподвижным, так как внешняя нагрузка на губках 3 схвата отсутствует, а силы, связанные с дефор2J
мированием гибкого колеса генератором, незначительны.
В случае соприкосновения с манипули руемым объектом, движение губок 3 схвата прекращается, крутящий момент от привода 7 при неподвижном жестком колесе 31 передается на гибкое колесо 29 и, соответственно на зубчатое колесо 30, которое поворачивает входящее с ним в зацепление зубчатое колесо 13 и закручивает соединенный с ним торсион 15. Дальнейшая работа устройства происходит ана логично описанному.
Применение предлагаемого схвата значительно расширяет функциональные возможности манипулятора или робота, повышает точность развиваемых губками схвата усилий и расширяет их диапазон. .
Предлагаемый схват с одинаковой надежностью может захватывать массивные и хрупкие детали, как за наружную, так и внутреннюю поверхности.
20
Фиг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очувствленный схват манипулятора | 1979 |
|
SU804427A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
