Изобретение относится к радиолокации и может использоваться для обнаружения и определения местоположения неподвижных людей, находящихся за преградой, а также для обнаружения, определения местоположения и идентификации движущегося объекта, находящегося за преградой.
Преграда представляет собой оптически непрозрачную среду, пропускающую радиоволны. Это может быть, например, стена из дерева, кирпича или бетона.
Известно техническое решение, описанное в статье Бугаева А.С. и др. Обнаружение и дистанционная диагностика людей за препятствиями с помощью радиолокационных средств. Ж. «Радиотехник», 2003, №7. Оно представляет собой доработанный датчик типа «Раскан» (Патент RU 2121671), предназначено для обнаружения и дистанционной диагностики людей за препятствиями и содержит передатчик, пространственно совмещенные передающую и приемную антенны, амплитудный детектор, полосовой фильтр, усилитель, интерфейсный блок, ЭВМ. Непрерывный монохроматический сигнал излучается в пространство. Сигнал, отраженный от тела человека и окружающих предметов, принимается антенной, демодулируется, отфильтровывается в полосе сигнала дыхания, усиливается, дискретизируется и поступает в ЭВМ. Результаты измерений отображаются на экране интерфейсного блока в реальном масштабе времени. Устройство реагирует на изменения амплитуды принимаемого сигнала, вызванные дыханием и сердцебиением человека.
Данное устройство не способно осуществлять селекцию объектов по дальности, что не позволяет определять их местоположение и выявлять движущиеся объекты, также оно не позволяет автоматизировать процесс измерений.
Известны способ и устройство для обнаружения движущихся объектов за стеной, выбранные в качестве прототипа (патент US 6466155). Устройство содержит РЛС, в состав которой входят передатчик и приемник, соединяемые при помощи коммутационного устройства соответственно с входом и выходом антенной решетки приемопередающих антенных пар, последовательно соединенные аналого-цифровой преобразователь (АЦП), блок вычитания фона, блок формирования радиолокационного изображения, сигнальный процессор, реализующий алгоритмы работы блоков вычитания фона и формирования радиолокационного изображения, дисплей, а также оперативно-запоминающее устройство (ОЗУ), соединенное с блоком формирования радиолокационного изображения. Приемопередающие антенные пары подключаются к РЛС последовательно с помощью коммутационного устройства. Каждая из них излучает в пространство и принимает отраженный импульсный сигнал. Сигнал преобразуется в цифровой вид, из него вычитается сигнал, отраженный от стены. Для всех антенных пар формируется радиолокационное изображение, оно записывается в ОЗУ и вычитается из изображения, полученного на следующем шаге зондирования. По наличию остаточных сигналов при помощи алгоритма пороговой обработки, который заложен в сигнальный процессор, делается вывод об обнаружении движущихся объектов. При помощи сигнального процессора осуществляется определение местоположения целей. Далее на дисплее отображается карта движения, которая показывает места, где была обнаружена активность.
Данное устройство не способно обнаруживать неподвижных людей и идентифицировать движущиеся объекты.
Технической задачей данного изобретения является создание способа и устройства для его осуществления, способного автоматически выявлять и определять местоположение неподвижных людей за преградой, а также автоматически выявлять, определять местоположение и идентифицировать движущийся объект, т.е. устанавливать, является ли он живым человеком или неживым объектом - роботом, тележкой и т.д.
Поставленная задача решается в способе обнаружения людей и движущихся объектов за преградой, заключающемся в том, что излучают в направлении преграды сверхширокополосный зондирующий сигнал, принимают отраженный сигнал, запоминают, вычитают его из отраженного сигнала, принятого через заданный период компенсации, после чего осуществляют пороговую обработку сигнала, в котором согласно изобретению прием и обработку отраженных сигналов проводят параллельно в нескольких идентичных каналах, перед запоминанием принятого отраженного сигнала в каждом канале осуществляют его селекцию по дальности и по результатам пороговой обработки сигнала во всех каналах определяют местоположение обнаруженных движущихся объектов.
Дополнительно в каждом канале после селекции по дальности сигналы накапливают, вычисляют спектр накопленной последовательности сигнала в полосе частот, соответствующих частоте дыхания человека, затем осуществляют пороговую обработку полученного спектра для каждого канала дальности, по которой определяют наличие частот, соответствующих дыханию человека, и по результатам пороговой обработки спектра во всех каналах определяют местоположение обнаруженных неподвижных людей.
Кроме того, в направлении зоны поиска излучают непрерывный монохроматический сигнал, принимают отраженный сигнал, детектируют, определяют его спектр, затем осуществляют пороговую обработку полученного спектра, по которой определяют наличие частот, соответствующих дыханию человека, и тем самым идентифицируют обнаруженный движущийся объект с живым человеком.
Поставленная задача достигается также в устройстве для обнаружения людей и движущихся объектов за преградой, содержащем антенный блок, подключенный к выходу передатчика сверхширокополосных зондирующих сигналов, приемный блок, выход которого соединен с входом канала обработки, и блок отображения данных, при этом канал обработки содержит аналого-цифровой преобразователь, включенный на входе канала обработки, и последовательно соединенные блок оперативной памяти и блок череспериодной компенсации, в котором согласно изобретению приемный блок выполнен многоканальным, введены дополнительные каналы обработки, идентичные первому, входы которых соединены соответственно с выходами приемного блока, и блок определения местоположения, входы которого подсоединены соответственно к выходам каналов обработки, в каждый канал обработки введены селектор по дальности, включенный между выходом аналого-цифрового преобразователя и входом блока оперативной памяти, и блок пороговой обработки сигнала, вход которого соединен с выходом блока череспериодной компенсации, а выход является первым выходом соответствующего канала обработки.
Поставленная задача достигается также тем, что в каждый канал обработки введены последовательно соединенные блок накопления цифровых отсчетов, фильтр нижних частот, блок вычисления спектра сигнала, блок пороговой обработки спектра сигнала, при этом вход блока накопления цифровых отсчетов соединен с вторым выходом селектора по дальности, а выход блока пороговой обработки спектра сигнала является вторым выходом соответствующего канала обработки.
Передатчик сверхширокополосных зондирующих сигналов может быть выполнен в виде, по крайней мере, одного генератора видеоимпульсов наносекундной или субнаносекундной длительности, при этом приемный блок может быть выполнен в виде многоканального стробоскопического приемника.
При этом антенный блок состоит из, по крайней мере одной, передающей антенны и нескольких приемных антенн.
Передатчик сверхширокополосных зондирующих сигналов может быть также выполнен в виде генератора частотно-модулированного сигнала со ступенчатым изменением частоты, при этом приемный блок может быть выполнен в виде многоканального супергетеродинного приемника.
Поставленная задача также достигается тем, что в устройство дополнительно введены последовательно соединенные генератор непрерывного монохроматического сверхвысокочастотного сигнала, антенный блок, состоящий из приемной и передающей антенн, детектор, дополнительный аналого-цифровой преобразователь, дополнительный фильтр нижних частот, дополнительный блок вычисления спектра сигнала и дополнительный блок пороговой обработки, выход которого подсоединен к дополнительному входу блока определения местоположения.
Введение дополнительных операций, а именно параллельной обработки отраженного сигнала, поступившего на все приемные антенны, и селекции по дальности позволяют определять местоположение людей и движущихся объектов за преградой.
Выполнение операций накопления последовательности отсчетов сигнала для каждого канала дальности, вычисления спектра накопленной последовательности отсчетов, пороговой обработки полученного спектра с целью его анализа на наличие частот, соответствующих дыханию человека, позволяют обнаруживать наличие неподвижных людей за преградой.
Дополнительное формирование и излучение непрерывного монохроматического зондирующего сигнал, прием отраженного сигнала, выделение колебания, модулирующего амплитуду или фазу принятого отраженного сигнала, дискретизацию полученного после детектирования низкочастотного сигнала, вычисление спектра сигнала, пороговая обработка полученного спектра с целью его анализа на наличие частот, соответствующих дыханию человека, позволяют осуществлять идентификацию движущегося объекта, а именно определять, является ли движущийся предмет живым или неживым
На чертеже представлена структурная схема устройства для обнаружения движущихся объектов и людей за преградой.
Устройство для обнаружения движущихся объектов и людей за преградой содержит антенный блок 1, подключенный соответственно к выходу передатчика 2 сверхширокополосных зондирующих сигналов, приемный блок 3, выполненный многоканальным, n выходов которого соединены соответственно с входами n идентичных каналов обработки 4-1, 4-2, …, 4-n.
Каждый канал обработки 4 содержит аналого-цифровой преобразователь (АЦП) 5, включенный на входе канала обработки, селектор по дальности 6, который представляет собой блок, стробируемый по дальности с учетом временной задержки отраженного от цели сигнала для каждого канала дальности, блок оперативной памяти (БОП) 7, блок череспериодной компенсации (БЧК) 8, блок пороговой обработки сигнала 9, блок накопления цифровых отсчетов 10, фильтр нижних частот (ФНЧ) 11 с полосой пропускания от 0 до 1 Гц, блок вычисления спектра сигнала 12, блок поровой обработки спектра сигнала 13.
Устройство также содержит блок определения местоположения 14 и блок отображения данных 15.
Передатчик 2 сверхширокополосных зондирующих сигналов может быть выполнен в виде генератора видеоимпульсов наносекундной или субнаносекундной длительности или в виде генератора частотно-модулированного сигнала со ступенчатым изменением частоты. Для повышения мощности зондирующего сигнала генераторов может быть несколько. При этом многоканальный приемный блок 3 может быть выполнен соответственно или в виде многоканального стробоскопического приемника или многоканального супергетеродинного приемника.
Антенный блок 1 состоит из одной или нескольких, в случае использования нескольких генераторов, передающих антенн и нескольких приемных антенн. Для определения местоположения целей количество приемных антенн выбирается соответствующим требуемому числу обнаруживаемых целей или большим (для устранения неоднозначности определения местоположения). Количество n каналов обработки 4 соответствует числу приемных антенн.
Устройство также содержит дополнительный канал, состоящий из последовательно соединенных генератора 16 непрерывного монохроматического сверхвысокочастотного сигнала, антенного блока 17, содержащего приемную и передающую антенны, детектора 18, при этом в случае использования фазового детектора опорным колебанием для него служит сигнал генератора 16, дополнительного АЦП 19, дополнительного ФНЧ 20 с полосой пропускания от 0 до 1 Гц, дополнительного блока вычисления спектра сигнала 21 и дополнительного блока пороговой обработки спектра сигнала 22, выход которого подсоединен к дополнительному входу блока определения местоположения 14.
Устройство работает следующим образом.
Видеоимпульсный сигнал или ЧМ-сигнал со ступенчатым изменением частоты, сформированный передатчиком 2, излучается передающими антеннами антенного блока 1. Сигнал, отраженный от различных объектов, попадает на приемные антенны антенного блока 1, с выхода каждой приемной антенны сигнал попадает на вход соответствующего канала приемного блока 3, число каналов которого соответствует числу приемных антенн. При видеоимпульсном зондирующем сигнале используется стробоскопический приемник, который производит масштабное увеличение длительности сигнала, т.е. переводит его в область более низких частот, что облегчает последующее аналого-цифровое преобразование. При этом все частотные составляющие сигнала сохраняются. При ЧМ зондирующем сигнале используется многоканальный супергетеродинный приемник, который переводит сигнал со ступенчатым изменением частоты на соответствующую промежуточную частоту, что облегчает последующее аналого-цифровое преобразование в АЦП 5 в каждом канале обработки 4. Далее в каждом из n каналов обработки 4 сигнал попадает на вход селектора по дальности 6, где в зависимости от времени прихода ему ставится в соответствие канал дальности, в котором находится объект, от которого сигнал отразился. Данная процедура осуществляется стробированием селектора по дальности 6 с учетом временной задержки отраженного от цели сигнала для каждого канала дальности.
Для обнаружения неподвижных людей из спектра полученного сигнала необходимо выделить компоненты в диапазоне от 0 до 1 Гц с приемлемым для этой цели разрешением не хуже 0,1 Гц, обусловленные колебаниями (перемещениями) грудной клетки человека с частотой его дыхания 0,2…0,8 Гц. Сигнал сердечных колебаний не выделяется, т.к. его мощность на порядок меньше из-за того, что площадь колеблющегося сердца много меньше площади колеблющейся грудной клетки человека. Для этого в каждом канале обработки 4 для каждого канала дальности цифровые отсчеты сигнала, полученные с выхода АЦП 5 и далее - с первого выхода селектора по дальности 6, последовательно накапливаются в течение не менее 10 сек в блоке накопления цифровых отсчетов 10, что обеспечит спектральное разрешение не хуже 0,1 Гц. Накопленная последовательность проходит через ФНЧ 11 с полосой пропускания от 0 до 1 Гц, в блок вычисления спектра сигнала 12, в котором с помощью операции дискретного преобразования Фурье (ДПФ) или быстрого преобразования Фурье (БПФ) определяется ее спектр. Обнаружение неподвижных людей осуществляется в блоке пороговой обработки спектра сигнала 13 путем анализа спектра последовательности отсчетов, накопленной для каждого канала дальности, получаемого с выхода блока вычисления спектра 12, на наличие частот, соответствующих дыханию человека. Данный анализ производится путем пороговой обработки спектра последовательности накопленных для каждого канала дальности отсчетов сигнала: значение спектральных отсчетов в каждом канале дальности сравнивается с порогом, значение которого выбирается, исходя из допустимого уровня вероятности ложной тревоги. Если порог превышен, принимается решение об обнаружении в рассматриваемом канале дальности неподвижного человека.
В результате для каждого канала приема и обработки сигнала, соответствующего своей приемной антенне, будет получен массив данных «канал дальности - наличие человека». Такие массивы являются исходными данными для последующего определения местоположения человека.
Обнаружение движущегося объекта осуществляется с помощью алгоритма череспериодной компенсации (ЧПК).
На первом этапе отраженный сигнал, принятый каждой приемной антенной антенного блока 1, со второго выхода селектора по дальности 6 записывается в память (БОП) 7.
Второй этап соответствует зондирующему импульсу, излученному в пространство через интервал времени, равный периоду компенсации. Значение этого периода задается, исходя из возможной скорости движения объектов (0,3…3 м/с), так, чтобы за период ЧПК объект с большой вероятностью попал в другой канал дальности, что необходимо для правильной работы алгоритма. На этом этапе принимаемый в каждом приемном канале и оцифрованный сигнал в каждом канале обработки 4 также записывается в память БОП 7. Далее сигнал поступает на вход блока ЧПК 8, где из него вычитается сигнал, полученный на первом этапе работы алгоритма и хранящийся в памяти БОП 7. Вычитание производится для каждого канала дальности. Результат вычитания представляет собой радиолокационное изображение исследуемого помещения, из которого удалена информация о неподвижных объектах, а движение есть не что иное, как остаточные сигналы. Обнаружение этих сигналов производится автоматически в блоке пороговой обработки 9 при помощи алгоритма пороговой обработки: значение отсчетов разностного сигнала, поступающих с выхода блока ЧПК 8, для каждого канала дальности сравнивается с порогом, значение которого выбирается, исходя из допустимого уровня вероятности ложной тревоги. Если порог превышен, принимается решение об обнаружении в рассматриваемом канале дальности движущегося объекта.
В результате для каждого канала, соответствующего своей приемной антенне, будет получен массив данных «канал дальности - наличие движущегося объекта». Такие массивы являются исходными данными для последующего определения местоположения объекта.
Сигналы с выходов каждого канала обработки 4, т.е. с выходов блоков пороговой обработки сигнала 9 и блоков пороговой обработки спектра сигнала 13 в каждом канале, поступают на входы блока определения местоположения 14, где вычисляются координаты обнаруженных неподвижных людей и движущихся объектов. Определение местоположения производится, например, суммарно-дальномерным методом, который имеет программную реализацию, заложенную в память блока определения местоположения 14. Так, зная канал дальности, в котором обнаружена цель, т.е. полное время распространения сигнала от передающей антенны до цели и от цели до приемной антенны, для всех приемных позиций вычисляется суммарное расстояние, пройденное сигналом от передающей антенны до цели и от цели до приемной антенны. Для каждой приемной позиции составляется уравнение линии положения - эллипса и путем решения системы таких уравнений находятся точки пересечения всех линий положения. Для борьбы с появлением ложных целей в устройство может быть введена избыточность: количество приемных антенн выбирается бóльшим, чем требуемое число обнаруживаемых целей. Истинной цели будет соответствовать некоторая область, в которой сосредоточены точки пересечения всех линий положения, тогда как ложные цели появляются в результате пересечения меньшего числа линий положения и их точки пересечения рассредоточены.
Когда движущийся объект обнаружен, производятся определение его местоположения и идентификация, при этом наблюдение за ним, т.е. обнаружение и определение местоположения, продолжаются. Для обеспечения совместной работы части РЛС, работающие с импульсным и непрерывным сигналами, отделяются друг от друга экраном, а также в каждый канал обработки сигнала импульсной части РЛС может быть введен режекторный фильтр, подавляющий непрерывный сигнал.
Для идентификации движущегося объекта служит дополнительный канал, состоящий из блоков 16-22.
Генератор непрерывного монохроматического СВЧ-сигнала 16 формирует сигнал частотой от 1,5 до 3 ГГц, который поступает на вход передающей антенны антенного блока 17, откуда излучается в пространство. Сигнал, отраженный от различных объектов, попадает на приемную антенну антенного блока 17. Амплитудный или фазовый детектор 18 выделяет колебание, модулирующее соответственно амплитуду или фазу принятого сигнала, по частоте изменения которой можно судить о наличии дышащего человека. Для последующей обработки полученный низкочастотный сигнал (НЧ) дискретизируется при помощи АЦП 19, и с его выхода поступает на вход ФНЧ 20 с полосой пропускания от 0 до 1 Гц и далее на вход дополнительного блока вычисления спектра сигнала 21, где с помощью операции ДПФ или БПФ определяется спектр полученного модулирующего НЧ-сигнала в диапазоне от 0 до 1 Гц с разрешением не хуже 0,1 Гц. Вывод о природе движущегося объекта принимается в блоке пороговой обработки спектра 22 путем анализа спектра, полученного с выхода блока вычисления спектра сигнала 21, на наличие частот, соответствующих дыханию человека. Данный анализ проводится путем пороговой обработки спектра НЧ-сигнала, полученного после детектирования принятого непрерывного монохроматического сигнала. Алгоритм пороговой обработки заключается в сравнении значения каждого частотного отсчета с порогом, значение которого выбирается, исходя из допустимого уровня вероятности ложной тревоги. При этом спектральные отсчеты, соответствующие частоте дыхания неподвижного человека, если такой обнаружен, в обработке не участвуют. Информация о природе движущегося объекта с выхода блока пороговой обработки 22 поступает на дополнительный вход блока определения местоположения 14 для того, чтобы далее отобразить, является ли движущийся объект живым человеком или чем-либо иным.
Когда координаты целей определены, на экран блока отображения данных 15 выводится изображение исследуемой области с нанесенной на него координатной сеткой и метками, которые соответствуют обнаруженным целям. При этом метки, соответствующие движущимся объектам, отображаются цветами, отличными от тех, которые соответствуют живым людям.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРОТКОИМПУЛЬСНЫЙ МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ОДНОЙ ПЛОСКОСТИ | 2011 |
|
RU2460089C1 |
| РАДИОИНТРОСКОП | 2004 |
|
RU2256904C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ЗА ПРЕГРАДОЙ | 2016 |
|
RU2626460C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ЧЕРЕЗ НЕПРОЗРАЧНЫЕ ПРЕГРАДЫ | 2009 |
|
RU2441252C2 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОНИЦАЕМОСТИ ПРЕГРАДЫ ДЛЯ ЗОНДИРУЮЩЕГО ИЗЛУЧЕНИЯ СВЕРХШИРОКОПОЛОСНОГО РАДАРА | 2012 |
|
RU2501032C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2015 |
|
RU2589746C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ВРЕМЕННОГО ПОЛОЖЕНИЯ СВЕРХШИРОКОПОЛОСНОГО СИГНАЛА И ЛОКАТОР ДЛЯ МОНИТОРИНГА ЖИВЫХ ОБЪЕКТОВ, РЕАЛИЗУЮЩИЙ ЭТОТ СПОСОБ | 2004 |
|
RU2258942C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2141119C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДЫХАНИЯ И СЕРДЦЕБИЕНИЯ | 2008 |
|
RU2392853C1 |
Способ и устройство для его осуществления предназначены для обнаружения и определения местоположения неподвижных людей и идентификации движущегося объекта за преградой. Способ заключается в излучении в направлении преграды зондирующего сигнала, приеме отраженного сигнала, вычитании его из сигнала, принятого через заданный период компенсации, и пороговой обработке сигнала, причем прием и обработку отраженных сигналов проводят в нескольких параллельных идентичных каналах, перед запоминанием принятого сигнала в каждом канале осуществляют его селекцию по дальности и по результатам пороговой обработки сигналов во всех каналах определяют местоположение обнаруженных движущихся объектов. Кроме того, в каждом канале после селекции по дальности сигналы накапливают, вычисляют спектр накопленной последовательности сигнала в полосе частот, соответствующих частоте дыхания человека, осуществляют пороговую обработку полученного спектра для каждого канала дальности, по которой определяют наличие частот, соответствующих дыханию человека, и по результатам пороговой обработки спектра во всех каналах определяют местоположение обнаруженных неподвижных людей. Дополнительное излучение в направлении зоны поиска непрерывного монохроматического сигнала и соответствующая обработка отраженного сигнала позволяют идентифицировать обнаруженный движущийся объект с живым человеком, что и является достигаемым техническим результатом изобретения. Предложенный способ реализуется с помощью устройства, выполненного определенным образом. 2 н. и 7 з.п. ф-лы, 1 ил.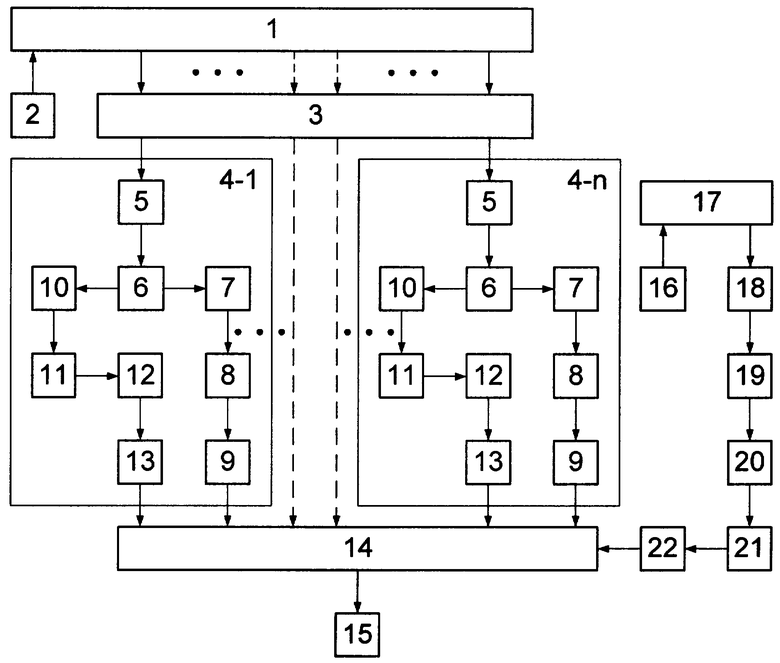
1. Способ обнаружения людей и движущихся объектов за преградой, заключающийся в том, что излучают в направлении преграды сверхширокополосный зондирующий сигнал, принимают отраженный сигнал, запоминают, вычитают его из отраженного сигнала, принятого через заданный период компенсации, после чего осуществляют пороговую обработку сигнала, отличающийся тем, что прием и обработку отраженных сигналов проводят параллельно в нескольких идентичных каналах, перед запоминанием принятого отраженного сигнала в каждом канале осуществляют его селекцию по дальности и по результатам пороговой обработки сигналов во всех каналах дальности осуществляют обнаружение движущихся объектов, кроме того, параллельно после селекции по дальности в каждом канале дальности сигналы накапливают, вычисляют спектр накопленной последовательности сигнала в полосе частот, соответствующих частоте дыхания человека, затем осуществляют пороговую обработку полученного спектра для каждого канала дальности, по которой определяют наличие частот, соответствующих дыханию человека, и по результатам пороговой обработки спектра во всех каналах дальности осуществляют обнаружение неподвижных людей, причем по результатам пороговой обработки в блоке определения местоположения вычисляют координаты неподвижных людей и движущихся объектов, затем, когда координаты целей определены, на экран блока отображения данных выводится изображение исследуемой области с нанесенной на него координатной сеткой и метками, которые соответствуют обнаруженным целям, при этом метки, соответствующие движущимся объектам и живым людям, отображают отличными друг от друга цветами.
2. Способ по п.1, отличающийся тем, что дополнительно в направлении зоны поиска излучают непрерывный монохроматический сигнал, принимают отраженный сигнал, детектируют, определяют его спектр, затем осуществляют пороговую обработку полученного спектра, по которой определяют наличие частот, соответствующих дыханию человека, при этом информация о природе движущегося объекта поступает в блок определения местоположения для установления, является ли движущийся объект живым человеком или иным движущимся объектом, при этом спектральные отсчеты, соответствующие частоте дыхания неподвижного человека, если такой обнаружен, в обработке не участвуют.
3. Устройство для обнаружения людей и движущихся объектов за преградой, содержащее антенный блок, подключенный к выходу передатчика сверхширокополосных зондирующих сигналов, приемный блок, выход которого соединен с входом канала обработки, и блок отображения данных, при этом канал обработки содержит аналого-цифровой преобразователь, включенный на входе канала обработки, и последовательно соединенные блок оперативной памяти и блок череспериодной компенсации, отличающееся тем, что приемный блок выполнен многоканальным, введены дополнительные каналы обработки, идентичные первому, входы которых соединены соответственно с выходами приемного блока, и блок определения местоположения, входы которого подсоединены соответственно к выходам каналов обработки, в каждый канал обработки введены селектор по дальности, включенный между выходом аналого-цифрового преобразователя и входом блока оперативной памяти, и блок пороговой обработки сигнала, вход которого соединен с выходом блока череспериодной компенсации, а выход является первым выходом соответствующего канала обработки, при этом в каждый канал обработки введены последовательно соединенные блок накопления цифровых отсчетов, фильтр нижних частот, блок вычисления спектра сигнала, блок пороговой обработки спектра сигнала, при этом вход блока накопления цифровых отсчетов соединен с вторым выходом селектора по дальности, а выход блока пороговой обработки спектра сигнала является вторым выходом соответствующего канала обработки.
4. Устройство по п.3, отличающееся тем, что передатчик сверхширокополосных зондирующих сигналов выполнен в виде, по крайней мере, одного генератора видеоимпульсов наносекундной или субнаносекундной длительности.
5. Устройство по п.4, отличающееся тем, что антенный блок состоит из, по крайней мере, одной передающей антенны и нескольких приемных антенн.
6. Устройство по п.4, отличающееся тем, что приемный блок выполнен в виде многоканального стробоскопического приемника.
7. Устройство по п.3, отличающееся тем, что передатчик сверхширокополосных зондирующих сигналов выполнен в виде генератора частотно-модулированного сигнала со ступенчатым изменением частоты.
8. Устройство по п.7, отличающееся тем, что приемный блок выполнен в виде многоканального супергетеродинного приемника.
9. Устройство по п.3, отличающееся тем, что в него введены последовательно соединенные генератор непрерывного монохроматического сверхвысокочастотного сигнала, антенный блок, состоящий из приемной и передающей антенн, детектор, дополнительный аналого-цифровой преобразователь, дополнительный фильтр нижних частот, дополнительный блок вычисления спектра сигнала и дополнительный блок пороговой обработки спектра, выход которого подсоединен к дополнительному входу блока определения местоположения.
| US 2002140597 A1, 03.10.2002 | |||
| /Справочник по радиоэлектронным системам | |||
| Под ред | |||
| КУЛИКОВСКОГО А.А | |||
| - М.: «Энергия», 1979, с.122, 123 | |||
| ДУДНИК П.И., ЧЕРЕСОВ Ю.И | |||
| Авиационные радиоэлектронные устройства | |||
| Изд | |||
| ВВИА им | |||
| Н.Е.Жуковского, 1986, с.212, 213 | |||
| RU 2058565 С1, 20.04.1996 | |||
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РЛС | 1995 |
|
RU2084921C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2260816C2 |
| RU 70310 U1, | |||

