Изобретение относится к радиотехнике, а именно к способу обнаружения движущихся объектов через непрозрачные преграды и устройству для его осуществления. Наиболее эффективно его можно использовать в спасательных и иных работах при ликвидации последствий техногенных катастроф для обнаружения живых движущихся людей.
Известен способ графического представления обнаруженных через непрозрачные преграды (стены) объектов (патент США 7,339,516 В2, оп. 4 марта 2008 г.). Объект обнаруживается с помощью анализа его физических свойств и признаков в каждый конкретный момент времени. Совокупность этих свойств и признаков анализируется с помощью конкретных алгоритмов обнаружения, и результат анализа отображается на дисплее в условном графическом представлении (например, фигуры человека). Недостатком такого способа является использование информации об объекте только в текущий момент времени. Предыдущая история движения объекта не используется.
Известно также устройство, предназначенное для диагностики физиологических функций живых организмов, в частности для диагностики параметров дыхания пациентов (патент на изобретение РФ №2321341, оп. 06.10.2006). Работа датчика основана на использовании сверхширокополосного (СШП) радара. Датчик позволяет следить за дыханием даже перемещающегося пациента, что достигается путем сложной цифровой обработки входных сигналов. При этом в данном устройстве отсутствует возможность одновременного слежения за дыхательными движениями нескольких объектов в разных точках исследуемого пространства.
Известен взятый за прототип способ обнаружения движущихся объектов через непрозрачные преграды, реализованный в устройстве по патенту США №5361070, оп. 1.11.1994 г. Способ основан на использовании одномерного сверхширокополосного радара и измерении расстояния до объектов. Способ включает облучение исследуемой области импульсами СШП радара и измерение уровня эхо-сигнала от объекта, находящегося на заданном расстоянии от радара.
Известное устройство для обнаружения движущихся объектов через стены, взятое за прототип, содержит, как и патентуемое изобретение, тактовый генератор импульсов, постоянную линию задержки импульсов, генератор одиночных импульсов, передатчик, передающую антенну регулируемую линию задержки, генератор стробирующих импульсов, стробоскопический приемник и приемную антенну (патент США №5361070, оп. 01.11.1994 г.).
Недостатком прототипа (устройства) является то, как проявляется в нем характерный, особенно для одномерных СШП радаров, эффект, связанный с многолучевым распространением сигнала. Зондирующее СШП излучение, отраженное от объекта, может попасть на антенну приемника радара разными путями благодаря отражениям от разных предметов в исследуемой области. При этом устройство обнаруживает множество движущихся объектов на разных расстояниях. Минимальное расстояние соответствует пути распространения сигнала от устройства до объекта и обратно без дополнительных отражений. Однако суммарный сигнал на антенне приемника определяется взаимодействием всех принимаемых сигналов. При этом может оказаться, что эхо-сигнал может уменьшиться и даже совсем исчезнуть из-за взаимодействия (интерференции) с сигналами, прошедшими другими путями. В этот момент возможны пропуск цели или неправильное определение устройством расстояния до движущегося объекта из-за многолучевого распространения сигнала.
Недостатками способа, реализуемого устройством-прототипом, являются:
1. Определение наличия движущегося объекта производится в текущий момент времени без учета движения в предыдущие моменты времени, что не позволяет использовать эти данные для повышения чувствительности устройства на фоне электронных шумов.
2. Высокая вероятность неправильного определения расстояния до объекта вследствие многолучевого распространения эхо-сигнала.
3. Невозможность определения объектов по их дыхательным движениям.
Задачей, на решение которой направлены изобретения, является создание способа и устройства, позволяющие обнаруживать живых движущихся людей за непрозрачными стенами, в том числе по дыханию, которое можно считать разновидностью движения.
Целью (техническим результатом) изобретений (способа и устройства) является повышение вероятности обнаружения движущегося объекта на фоне шумовых помех, повышение точности измерения расстояния до движущегося объекта.
Это достигается тем, что в способе обнаружения движущихся объектов через непрозрачные преграды, включающем облучение исследуемой области импульсами сверхширокополосного радара и измерение эхо-сигнала от объекта, находящегося на заданном расстоянии от радара, согласно изобретению для обнаружения движения используется двумерная функция зависимости модуля разности соседних по времени измерений уровня эхо-сигнала от времени наблюдения и расстояния до объекта с последующим отображением ее на дисплее.
В частном случае для обнаружения периодических дыхательных движений используется цифровой анализатор спектра, а на экране дисплея визуализируется двумерная функция зависимости спектра переменной составляющей эхо-сигнала от расстояния и частоты.
Технический результат достигается также тем, что в сверхширокополосном радаре для обнаружения движущихся объектов через непрозрачные преграды, включающем тактовый генератор импульсов, постоянную линию задержки импульсов, генератор одиночных импульсов, передатчик, передающую и приемную антенны, регулируемую линию задержки, генератор одиночных стробирующих импульсов и стробоскопический приемник, согласно изобретению стробоскопический приемник последовательно соединен с блоком синхронизации и съема информации (БССИ), устройством цифровой обработки ее и дисплеем, а через блок синхронизации и съема информации соединен с регулируемой линией задержки.
Замена регулятора времени задержки и дифференциатора, содержащихся в устройстве-прототипе на блоке БССИ, устройство для обработки информации и дисплей позволяет измерить разностный полезный сигнал (от последовательных измерений уровня эхо-сигнала) как функцию расстояния до объектов и времени наблюдения и выполнить визуализацию этой функции на экране дисплея. Такая функция позволяет обнаружить движение в каждой точке исследуемого пространства путем вычисления модуля разности соседних по времени измерений уровня эхо-сигнала от расстояния и времени наблюдения.
Сущность изобретения и его преимущество иллюстрируется описанием примера исполнения и прилагаемыми графическими материалами, на которых изображено:
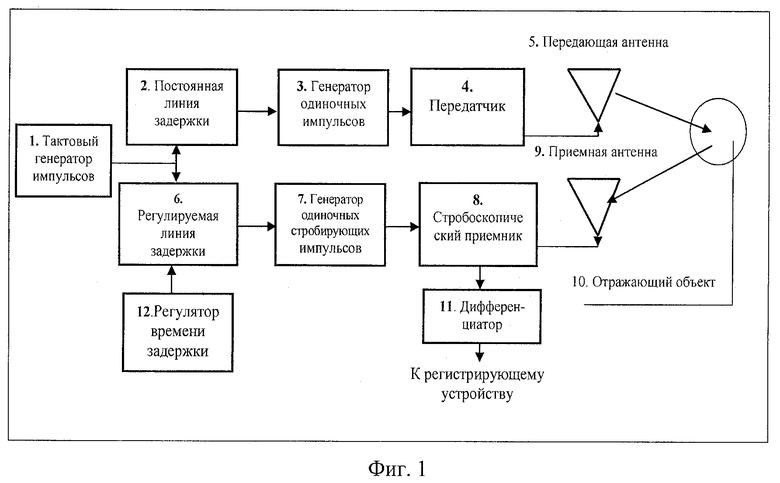
на фиг.1 - блок-схема устройства для обнаружения движущихся объектов через непрозрачные преграды по патенту США №5361070 (прототипа);
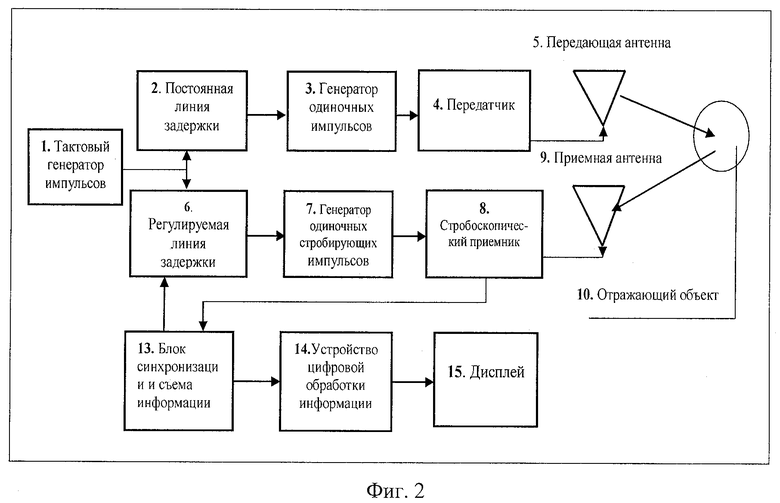
на фиг.2 - блок-схема устройства для обнаружения движущихся объектов через непрозрачные преграды;
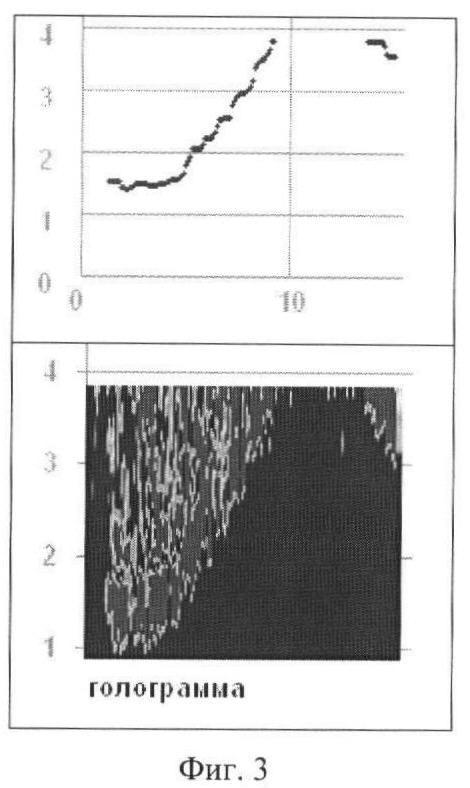
на фиг.3 приведена визуализация сигнала движения объекта во времени, по вертикальной оси отложено расстояние до объекта, по горизонтальной - время наблюдения; при этом темный цвет соответствует минимальному уровню сигнала движения, светлый - максимальному; в верхней части фиг.3 приведена восстановленная траектория движения;
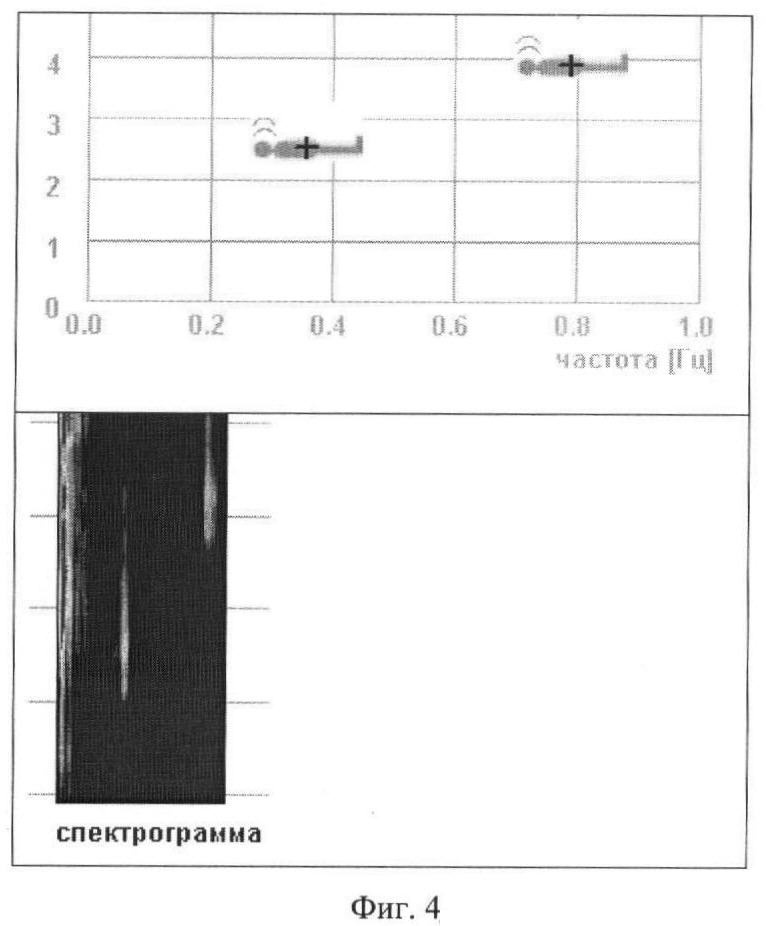
на фиг.4 приведена отображенная на экране дисплея функция визуализации спектра, в верхней - символическое отображение двух объектов, найденных по дыханию.
Изображеное на фиг.1 известное устройство по патенту США №5361070 для обнаружения движущихся объектов через стены на основе сверхширокополосного радара, взятое за прототип, содержит тактовый генератор импульсов 1, постоянную линию задержки импульсов 2, генератор одиночных импульсов 3, передатчик 4, передающую антенну 5, регулируемую линию задержки 6, генератор одиночных стробирующих импульсов 7, стробоскопический приемник 8, приемную антенну 9. Позиция 10 - отображающий объект. Устройство-прототип содержит также дифференциатор 11 и регулятор времени задержки 12. Наличие движения в точке на заданном расстоянии от передающей антенны определяет дифференциатор, вычисляющий разность последовательных измерений уровня эхо-сигнала. Несовпадение уровней указывает на перемещение объекта.
Патентуемое изобретение - сверхширокополосный радар (фиг.2) включает тактовый генератор импульсов 1, постоянную линию задержки импульсов 2, генератор одиночных импульсов 3, передатчик 4, передающую антенну 5, регулируемую линию задержки 6, генератор одиночных стробирующих импульсов 7, стробоскопический приемник 8, приемную антенну 9, подающие и принимающие сигнал от объекта 10, блок синхронизации и съема информации 11, устройство цифровой обработки информации 14 и дисплей 15. При этом стробоскопический приемник 8 последовательно соединен через блок синхронизации и съема информации 13 с устройством для цифровой обработки сигнала 14 и дисплеем 15, а также с регулируемой линией задержки.
Устройство работает следующим образом. Импульсы от генератора тактовых импульсов 1 одновременно поступают на постоянную линию задержки 2 и регулируемую линию задержки 6. С выхода постоянной линии задержки 2 импульсы подаются на генератор одиночных импульсов 3, а затем - на передающую антенну 4, которая излучает импульс в исследуемое пространство. Излученный электромагнитный импульс отражается от исследуемого объекта 10 и через приемную антенну 9 поступает на стробоскопический приемник 8. Выделение момента приема осуществляет импульс с генератора стробирующих импульсов 7. Этот импульс задержан относительно момента излучения импульса передатчиком 4 на некоторую величину τ регулируемой линией задержки 6. Временная задержка τ связана с требуемым расстоянием до исследуемого объекта L соотношением: τ=2×L/C, где С - скорость света.
Аналоговый сигнал со стробоскопического приемника 8 подается на БССИ.
Блок синхронизации и съема информации 11 управляет работой СШП радара, обеспечивая процесс периодического сканирования исследуемой области и съем данных в форме цифрового сигнала.
Данные сканирования поступают на устройство цифровой обработки информации 14, где формируется двумерная функция зависимости уровня эхо-сигнала от расстояния и времени. Такая функция хранит информацию о движениях в исследуемой области за все время наблюдения. Функция позволяет обнаруживать движение в каждой точке путем вычисления модуля разности соседних по времени измерений от расстояния и времени.
Эта функция выводится на дисплей 15, причем большей величине сигнала соответствует более светлый оттенок, а меньшей - величине сигнала - темный оттенок. (Другая возможность - отображение в псевдоцветах, когда нулевому уровню соответствует синий цвет, а максимальному - красный). Данная функция визуализации отображает движение объектов во всей области наблюдения за все время наблюдения.
Решение об обнаружении движущегося объекта принимает оператор, использующий свойства пространственной суммации сигнала своего зрительного анализатора (мозга).
Указанное свойство зрительного анализатора человека проявляется, к примеру, при визуальном анализе фотографий со спутников. Разрешающая способность фотографирующих устройств может быть недостаточной для отображения мелких компактных объектов, но протяженные тонкие объекты (к примеру, трубопроводы), ширина которых много меньше величины разрешения, хорошо обнаруживаются зрительным анализатором человека на фотографиях со спутников за счет эффекта пространственной суммации сигнала.
С помощью описанной выше функции визуализации изображения можно отбрасывать ложно обнаруженные движущиеся объекты. Критерием может служить задаваемая максимальная скорость перемещения объекта. Поэтому быстрые перемещения объекта на большие расстояния трактуются как ложные обнаружения.
Пример осуществления способа. Для обнаружения объектов по их дыханию также используется двумерная функция визуализации, однако, теперь в форме зависимости спектра полезного сигнала от расстояния и частоты. Для этого устройство цифровой обработки сигнала по завершении процесса сканирования проводит спектральный анализ переменной составляющей эхо-сигнала для каждого расстояния, и функция визуализации представляется как двумерная функция зависимости спектральной плотности от частоты и расстояния. Таким образом, по завершении процесса сканирования, можно найти все объекты в исследуемой области по их периодическому дыханию. Пример функции визуализации спектра приведен на фиг.4 в нижней части, а положение объектов, найденных по дыханию, приведено в верхней части. Обнаруженные объекты различаются частотой дыхания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОНИЦАЕМОСТИ ПРЕГРАДЫ ДЛЯ ЗОНДИРУЮЩЕГО ИЗЛУЧЕНИЯ СВЕРХШИРОКОПОЛОСНОГО РАДАРА | 2012 |
|
RU2501032C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ВРЕМЕННОГО ПОЛОЖЕНИЯ СВЕРХШИРОКОПОЛОСНОГО СИГНАЛА И ЛОКАТОР ДЛЯ МОНИТОРИНГА ЖИВЫХ ОБЪЕКТОВ, РЕАЛИЗУЮЩИЙ ЭТОТ СПОСОБ | 2004 |
|
RU2258942C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ЗА ПРЕГРАДОЙ | 2016 |
|
RU2626460C1 |
| СПОСОБ МОНИТОРИНГА ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327415C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛЮДЕЙ И ДВИЖУЩИХСЯ ОБЪЕКТОВ ЗА ПРЕГРАДОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2384860C2 |
| СПОСОБ ОБНАРУЖЕНИЯ СКРЫТЫХ НЕЛИНЕЙНЫХ РАДИОЭЛЕКТРОННЫХ ЭЛЕМЕНТОВ | 2012 |
|
RU2516436C2 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РАДИОЛОКАЦИОННОГО СВЕРХШИРОКОПОЛОСНОГО ЗОНДИРОВАНИЯ | 2007 |
|
RU2348945C1 |
| РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ МЕСТОПОЛОЖЕНИЯ ЗАПРЕГРАДНОГО ОБЪЕКТА | 2014 |
|
RU2580828C1 |
| СЕНСОР ДЛЯ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ПРИ ПОМОЩИ СВЕРХШИРОКОПОЛОСНОГО ЗОНДИРУЮЩЕГО СИГНАЛА (ВАРИАНТЫ) | 2006 |
|
RU2311658C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ | 2006 |
|
RU2308750C1 |
Изобретение относится к радиотехнике и может использоваться в спасательных и иных работах для обнаружения живых движущихся людей. Достигаемый технический результат от использования изобретения заключается в повышении вероятности обнаружения движущегося объекта на фоне шумовых помех, повышении точности измерения расстояния до движущегося объекта. Сущность способа заключается в том, что осуществляют облучение исследуемой области импульсами сверхширокополосного радара и измерение эхо-сигнала от объекта, находящегося на заданном расстоянии от радара, при этом для обнаружения движения используется двумерная функция зависимости модуля разности соседних по времени измерений уровня эхо-сигнала от расстояния до объекта и времени наблюдения с последующим отображением ее на дисплее. 4 ил.
Способ обнаружения движущихся объектов через непрозрачные преграды, основанный на облучении исследуемой области импульсами сверхширокополосного радара, измерении уровней эхо-сигналов объектов, находящихся на заданных расстояниях от радара, и выявления наличия движения по несовпадению уровней замеренных эхо-сигналов, отличающийся тем, что осуществляют процесс периодического сканирования исследуемой области и съем данных в форме цифровых сигналов, цифровую обработку сигналов, формирование двумерной функции зависимости уровня отраженного сигнала от расстояния и времени, которую используют для обнаружения движения в каждой точке путем вычисления изменения (модуля) разности соседних по времени наблюдения измерений уровней эхо-сигнала, при этом в качестве критерия для принятия решения об обнаружении движения используют задаваемую максимальную скорость перемещения объекта, превышение которой объектом трактуется как ложное обнаружение.
| US 5361070 A, 01.11.1994 | |||
| СПОСОБ ОБРАБОТКИ И ОТОБРАЖЕНИЯ ЭХО-СИГНАЛОВ ДЛЯ ДИФФЕРЕНЦИАЦИИ БИОЛОГИЧЕСКИХ ТКАНЕЙ В УЛЬТРАЗВУКОВЫХ ДИАГНОСТИЧЕСКИХ СКАНЕРАХ | 2004 |
|
RU2253370C1 |
| RU 2008103658 A, 10.08.2009 | |||
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2116099C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2248235C1 |
| US 6031482 A, 29.02.2000 | |||
| WO 2005029133 A1, 31.03.2005 | |||
| US 6238342 B1, 29.05.2001 | |||
| Способ обработки изделий | 1981 |
|
SU1025522A1 |

