Изобретение относится к радиотехнике, а именно к способу определения проницаемости преграды для зондирующего излучения сверхширокополосного (СШП) радара, предназначенного для обнаружения биообъектов за непрозрачными преградами. Наиболее эффективно его можно использовать для идентификации преград непроницаемых для зондирующих импульсов СШП радара с целью подтверждения достоверности вывода об отсутствии движущихся объектов за преградами при обнаружении живых людей в спасательных или иных работах при ликвидации последствий техногенных катастроф.
Известные устройства и способы обнаружения движущихся объектов через оптически непрозрачные преграды (US 5361070, оп. 1.11.1994 и RU 2441252, оп. 27.01.2012 г., G01S 13/20) не учитывают возможность наличия у оптически непрозрачной преграды такого свойства, как непроницаемость для радиоизлучения в диапазоне длин волн 1-30 см.
Актуальность проблемы связана с необходимостью повышения достоверности способов обнаружения движущихся объектов через оптически непрозрачные преграды, основанных на облучении исследуемой области импульсами СШП радара и измерении уровня эхо-сигнала от объекта. Отсутствие обнаружения может быть вызвано как отсутствием движущихся объектов за преградой, так и непрозрачностью такой преграды для излучения СШП радара.
В настоящее время разработаны и успешно применяются методы генерации, излучения, приема и обработки СШП сигналов и соответствующие технические средства.
Известен способ определения непроницаемости преграды для зондирующего излучения СШП радара, который реализован в известном серийном выпускаемом приборе Radar Vision 2i, компании Time Domain (США, Хантсвилл, штат Алабама). Прибор представляет собой СШП радар, в который встроен металлоискатель, способный обнаруживать непроницаемые для него металлические или иные преграды, в состав которых входят металлические сетки.
Способ не позволяет подтвердить проницаемость сильно поглощающих излучение диэлектрических преград (например, влажной стенки).
Ближайший аналог патентуемого способа не обнаружен.
Задачей, на решение которой направлено изобретение, является создание способа определения проницаемости преграды для зондирующего излучения сверхширокополосного радара для оценки достоверности результатов поиска живых людей за непрозрачными преградами, включая преграды с диэлектрическими свойствами, сильно поглощающими излучение.
Технический результат от использования изобретения заключается в расширении диапазона действия за счет обеспечения возможности оценки преград сильно поглощающих излучения, например, мокрой стенки.
Поставленная задача с указанным техническим результатом достигается способом определения проницаемости преграды для зондирующего излучения сверхширокополосного радара, при котором однократно сканируют пространство за исследуемой преградой зондирующими импульсами сверхширокополосного радара, располагая непосредственно на наружной поверхности преграды антенну передатчика и антенну приемника, регистрируют сигналы на выходе из радара, преобразуют полученные сигналы по методу Фурье в амплитудно-частотный спектр, исключая вклад прямой наводки зондирующего импульса, и анализируют полученный спектр, сопоставляя его с эталонной амплитудно-частотной зависимостью, предварительно заготовленной сканированием пространства за непроницаемой преградой, при сопоставительном анализе на эталонной кривой выявляют участок, где практически исчезает высокочастотная часть спектра, а по наличию высокочастотной части спектра на соответствующем участке исследуемой зависимости делают вывод о проницаемости исследуемой преграды.
В наиболее преимущественном варианте исполнения изобретения для исключения вклада прямой наводки зондирующего импульса преобразованию Фурье подвергают модифицированный сигнал на выходе радара, в котором исключен участок с момента начала излучения импульса до момента t, когда в антенне приемника затухают колебания, вызванные зондирующим импульсом.
Существенность признаков, совокупность которых составляет формулу изобретения, вытекает из нижеследующего.
Фиксация отраженного от препятствий за преградой сигнала зондирующего СШП импульса является сложной задачей, поскольку на приемную антенну приходят одновременно два сигнала: очень слабый отраженный сигнал и сигнал прямой наводки от антенны передатчика. Если антенны приемника и передатчика радара располагают непосредственно на преграде (стенке, перекрытии и т.п.), при непроницаемой преграде на антенну приемника попадают только прямые наводки от антенны передатчика. Если преграда пропускает СШП излучение, то на антенну воздействуют отраженный сигнал, прошедший через преграду, и сигнал прямой наводки антенны передатчика. При этом спектральный состав отраженного сигнала и сигнала наводки отличаются. Спектральная плотность сигнала прямой наводки изменяется с течением времени после подачи импульса на антенну передатчика. В момент излучения зондирующего импульса спектр излучения практически определяется спектром очень короткого зондирующего импульса. Затем колебания в антенне передатчика начинают затухать. Спектр излучения меняется. Высокочастотные составляющие в нем деградируют. В отраженном же сигнале, приходящем с временной задержкой после излучения зондирующего импульса, спектральная плотность такая же, как в зондирующем импульсе в момент излучения. Поэтому наличие в спектре входного сигнала высокочастотных составляющих, обусловленных наличием отраженных от препятствий за преградой зондирующих импульсов, свидетельствует о ее проницаемости, а амплитуда высокочастотных составляющих спектра несет информацию о поглощающей способности преграды.
Реальный СШП радар имеет свой порог чувствительности. Если амплитуда отраженных импульсов меньше этого порога, то движение объектов не может быть обнаружено. Если подобрать поглощение некой эталонной преграды таким, чтобы движение через нее не обнаруживалось и в дальнейшем сравнивать участки спектров реального сигнала с аналогичными участками для эталонной преграды, то можно делать вывод о проницаемости конкретной преграды для данного радара.
В штатной работе СШП радаров для обнаружения движений объектов за преградами производится многократное сканирование исследуемой области с сохранением результатов. При этом движение объекта в каждой точке определяется по изменению уровня отраженного сигнала от этой точки при последовательных сканированиях.
Для определения прозрачности преграды для СШП излучения радара в настоящем изобретении используются данные однократного сканирования исследуемой области, представляющие собой зависимость уровня сигнала, регистрируемого стробоскопическим приемником, от расстояния до отражателя.
При этом из сигнала исключается вклад прямой наводки зондирующего импульса передатчика в момент излучения путем обнуления сигнала приемника радара с момента начала излучения до момента времени t затухания наводок в антенне приемника.
Подбором величины t можно уменьшить вклад прямых наводок зондирующего импульса в антенне передатчика. Чем больше t, тем меньше влияние импульса прямой наводки, поданного в момент времени t=0. При проницаемой преграде на антенну приемника попадают также и отраженные сигналы. С увеличением t увеличивается расстояние, с которого начинается фиксация отраженных импульсов. То есть, увеличение t приводит к уменьшению вклада наводок от зондирующего импульса, но, с другой стороны, будут учтены отражения только от тех объектов, которые расположены на расстояниях больших, чем 2×с×t, где c - скорость света.
Сущность изобретения и его преимущества иллюстрируются описанием примера исполнения и прилагаемыми графическими материалами, на которых изображено:
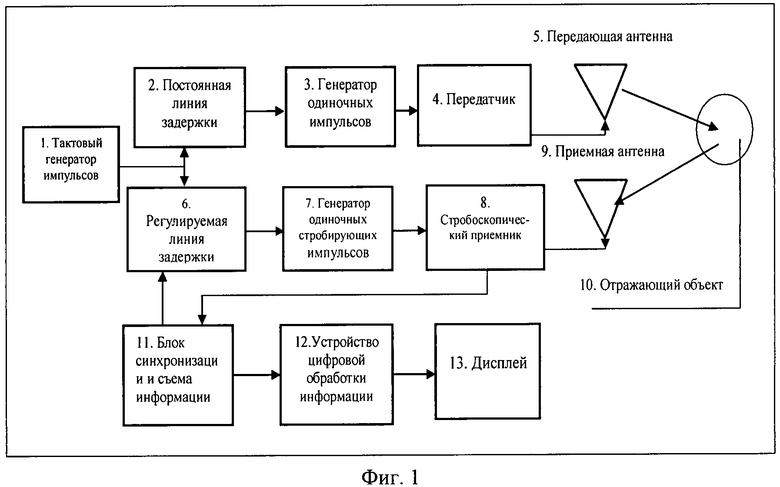
на фиг.1 - блок-схема СШП радара, позволяющего обнаруживать непроницаемые для СШП излучения преграды.
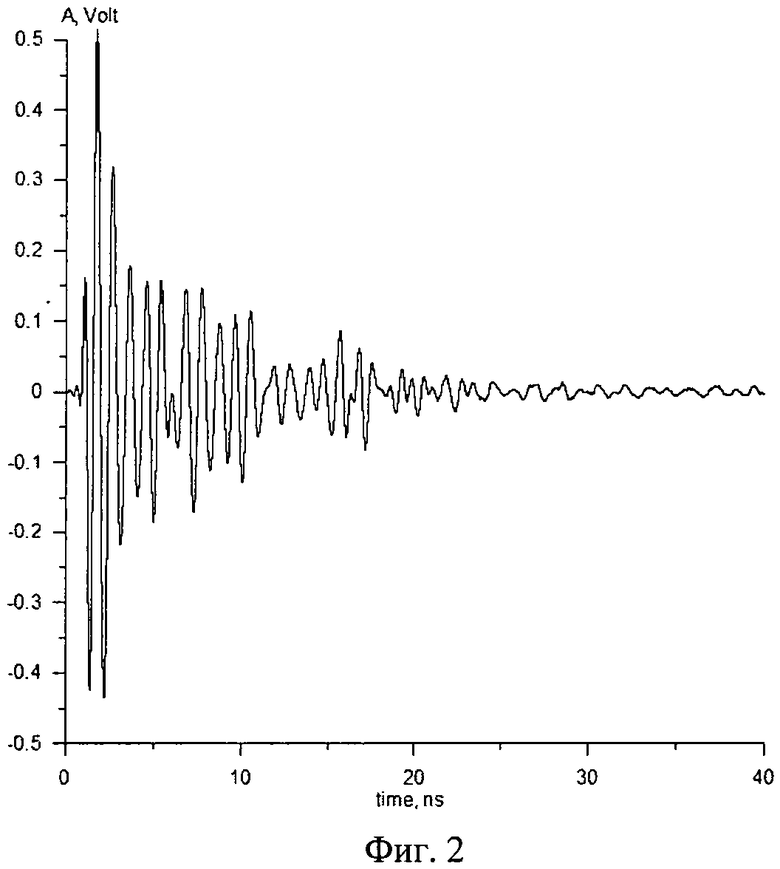
на фиг.2 - измеренная с помощью СШП радара зависимость уровня сигнала на входе стробоскопического приемника радара от расстояния до отражающего объекта;
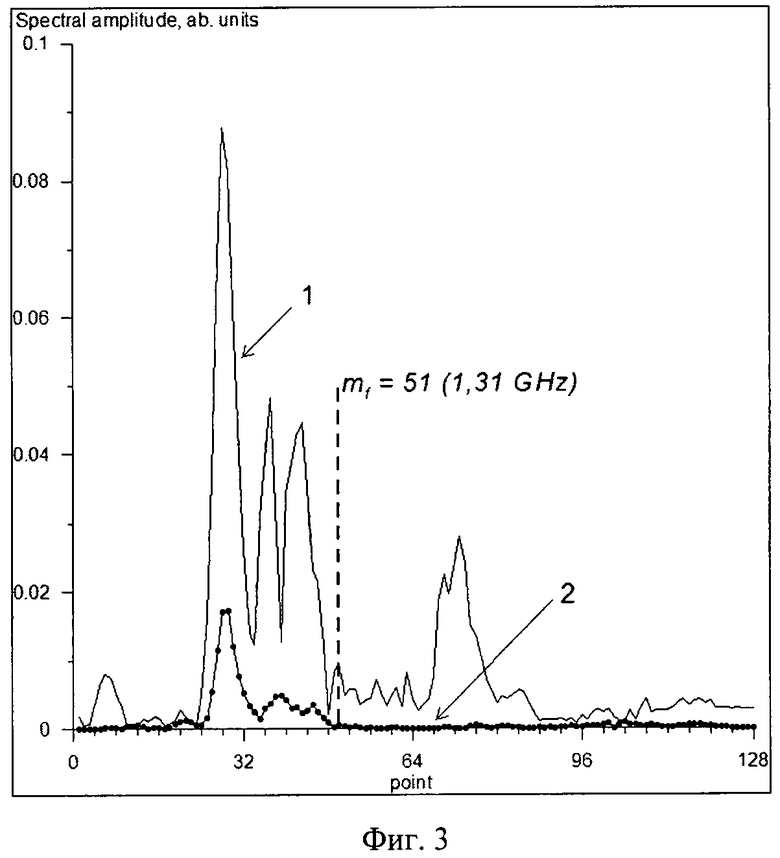
на фиг.3 - результаты обработки сигналов приемника СШП радара в случае проницаемой и непроницаемой преград.
Для осуществления патентуемого способа используется известное устройство (RU 2441252).
СШП радар (фиг.1) содержит тактовый генератор импульсов 1, постоянную линию задержки 2, генератор одиночных импульсов 3, передатчик 4, передающую антенну 5, регулируемую линию задержки 6, генератор одиночных стробирующих импульсов 7, стробоскопический приемник 8, приемную антенну 9, принимающую отраженный сигнал от объекта 10, блок синхронизации и съема информации (БССИ) 11, устройство цифровой обработки информации 12 и дисплей 13.
Стробоскопический приемник 8 последовательно соединен через блок синхронизации и съема информации 13 с устройством цифровой обработки сигнала 14 и дисплеем 15, а также с регулируемой линией задержки.
Устройство работает следующим образом. Импульсы от генератора тактовых импульсов 1 одновременно поступают на постоянную линию задержки 2 и регулируемую линию задержки 6. С выхода постоянной линии задержки 2 импульсы подаются на генератор одиночных импульсов 3, а затем - на передающую антенну 4, которая излучает импульс в исследуемое пространство. Излученный электромагнитный импульс отражается от препятствий 10 и через приемную антенну 9 поступает на стробоскопический приемник 8. Выделение момента приема осуществляет импульс с генератора стробирующих импульсов 7. Этот импульс задержан относительно момента излучения импульса передатчиком 4 на некоторую величину т регулируемой линией задержки 6. Временная задержка т.связана с расстоянием до исследуемого объекта L соотношением τ=2×L/c, где с - скорость света. Аналоговый сигнал со стробоскопического приемника 8 подается на блок БССИ 11. Этот блок управляет работой СШП радара, обеспечивая процесс сканирования исследуемой области и съем данных в форме цифрового сигнала. Данные сканирования поступают на устройство цифровой обработки информации 13. где формируется N - разрядный вектор - зависимость уровня сигнала приемника от времени задержки стробирующего импульса приемника в регулируемой линии задержки 6, где N - число шагов по времени в регулируемой линии задержки (см. фиг.1).
Устройство цифровой обработки информации 13 производит обработку N - разрядного вектора в соответствии с алгоритмом, описанным ниже, и производит оценку непроницаемости преграды. Результат отображается на дисплее 13.
Пример реализации изобретения
Осуществлено сканирование пространства за преградой строительной стенкой стандартной толщины. Результат однократного сканирования зондируемого пространства СШП радаром (фиг.2) представляет собой график зависимости уровня отраженного сигнала от расстояния до отражающего излучение объекта через проницаемую кирпичную стенку толщиной 35 см, глубина сканирования - 6,5 м Расстояние до объекта пропорционально времени прохождения зондирующего импульса от радара до отражателя и обратно.
Для исключения из рассмотрения всех процессов наводок в приемной антенне до момента времени t после подачи зондирующего импульса обнулили сигналы на временном отрезке графика от момента начала излучения зондирующего импульса до момента времени t, когда в антенне приемника затухают колебания, вызванные прямым попаданием на нее этого зондирующего импульса.
Полученные таким образом модифицированные сигналы подвергаются быстрому преобразованию Фурье (БПФ). Результаты применения БПФ - кривая 1 и эталонная кривая 2 (фиг.3) относятся к прозрачной и непрозрачной преградам соответственно. Непрозрачная преграда представляла собой многослойный пакет поглощающего материала. Подбиралось минимальное количество слоев этого материала, при котором движение объекта за преградой не обнаруживалось.
Быстрое преобразование Фурье в данном случае имело 128 точек. Из графиков фиг.2 следует, что спектры проницаемой и непроницаемой преград удобно сравнивать с использованием высокочастотных составляющих. Сравнивались площади под участками графиков правее точки mf=51. Выбор точки mf соответствует частоте, при которой спектральные зависимости начинают существенно различаться (см. фиг.3). Площадь под графиком для участка спектра для непроницаемой преграды правее точки mf=51 измеряется при градуировке радара и является техническим параметром прибора. На эталонной кривой амплитудно-частотной зависимости 2 участок правее указанной точки явно отличается от участка исследуемой зависимости правее этой же точки. Это отличие заключается в том, что на участке исследуемой зависимости имеется высокочастотная часть спектра.
Отношение площадей под кривыми равно S1/S2=0.417/0.022, где S1 и S2 - площади под кривыми 1 и 2 соответственно, что позволяет уверенно различать проницаемую и непроницаемую преграды. Для данного радара достаточно, чтобы значение отношения площадей превышало единицу.
Т.е. при этом условии стенка проницаема для данного радара.
Применимость патентуемого способа: оценка достоверности результатов поиска живых людей за непрозрачными для глаз стенами.
Отсутствие фиксации движений по результатам поиска при использовании известных способов обнаружения требует проведения исследования проницаемости преграды. Если она оказывается проницаемой, то тем самым подтверждается достоверность вывода об отсутствии движений объектов. В противном случае вывод об отсутствии движений объектов не достоверен.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ЧЕРЕЗ НЕПРОЗРАЧНЫЕ ПРЕГРАДЫ | 2009 |
|
RU2441252C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ВРЕМЕННОГО ПОЛОЖЕНИЯ СВЕРХШИРОКОПОЛОСНОГО СИГНАЛА И ЛОКАТОР ДЛЯ МОНИТОРИНГА ЖИВЫХ ОБЪЕКТОВ, РЕАЛИЗУЮЩИЙ ЭТОТ СПОСОБ | 2004 |
|
RU2258942C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 1996 |
|
RU2105330C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2000 |
|
RU2194292C2 |
| СПОСОБ МОНИТОРИНГА ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327415C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛЮДЕЙ И ДВИЖУЩИХСЯ ОБЪЕКТОВ ЗА ПРЕГРАДОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2384860C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ "МЕТАРАДАР" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263934C1 |
| СВЕРХШИРОКОПОЛОСНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОФИЛЯ СЛОЕВ ТКАНИ ЖИВОГО ОРГАНИЗМА И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2014 |
|
RU2578298C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ЗА ПРЕГРАДОЙ | 2016 |
|
RU2626460C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛОКАЛЬНЫХ ЭФФЕКТИВНЫХ ПОВЕРХНОСТЕЙ РАССЕЯНИЯ ОБЪЕКТОВ В СВЕРХШИРОКОЙ ПОЛОСЕ ЧАСТОТ | 2007 |
|
RU2360264C1 |
Изобретение относится к радиотехнике и предназначено для оценки достоверности результатов поиска живых людей за непрозрачными преградами с использованием сверхширокополосного (СШП) радара путем проведения исследований по определению проницаемости преграды для используемого при поиске радара. Достигаемый технический результат - расширение диапазона действия за счет обеспечения возможности оценки преград, сильно поглощающих излучение, например мокрой стенки. Сущность способа определения проницаемости преграды для зондирующего излучения СШП радара заключается в том, что однократно сканируют пространство за исследуемой преградой зондирующими импульсами СШП радара, располагая антенну передатчика и антенну приемника непосредственно на наружной поверхности преграды, регистрируют сигналы на выходе из радара, преобразуют полученные сигналы по методу Фурье в амплитудно-частотный спектр и анализируют спектр, сопоставляя его с эталонным, соответствующим заведомо непроницаемой для радара преграде; по наличию высокочастотной части спектра на кривой, соответствующей исследуемой преграде, делают вывод о ее проницаемости для конкретного радара. 1 з.п. ф-лы, 3 ил.
1. Способ определения проницаемости преграды для зондирующего излучения сверхширокополосного радара, при котором однократно сканируют пространство за исследуемой преградой зондирующими импульсами сверхширокополосного радара, располагая непосредственно на наружной поверхности преграды антенну передатчика и антенну приемника, регистрируют сигналы на выходе из радара, преобразуют полученные сигналы по методу Фурье в амплитудно-частотный спектр, исключая вклад прямой наводки зондирующего импульса, и анализируют полученный спектр, сопоставляя его с эталонной амплитудно-частотной зависимостью, предварительно заготовленной сканированием пространства за непроницаемой преградой, при сопоставительном анализе на эталонной кривой выявляют участок, где практически исчезает высокочастотная часть спектра, а по наличию высокочастотной части спектра на соответствующем участке исследуемой зависимости делают вывод о проницаемости исследуемой преграды.
2. Способ определения проницаемости преграды для зондирующего излучения сверхширокополосного радара по п.1, в котором для исключения вклада прямой наводки зондирующего импульса, преобразованию Фурье подвергают модифицированный сигнал на выходе радара, в котором исключен участок с момента начала излучения импульса до момента времени t, когда в антенне приемника затухают колебания, вызванные зондирующим импульсом.
| US 5361070 B1, 16.05.2000 | |||
| RU 2008118533 A, 20.11.2009 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2313108C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ЧЕРЕЗ НЕПРОЗРАЧНЫЕ ПРЕГРАДЫ | 2009 |
|
RU2441252C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛЮДЕЙ И ДВИЖУЩИХСЯ ОБЪЕКТОВ ЗА ПРЕГРАДОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2384860C2 |
| US 7339516 B2, 04.03.2008 | |||
| WO 2005029133 A1, 31.03.2005 | |||
| Передача с мальтийским крестом | 1947 |
|
SU75199A1 |
| US 6031482 A, 29.02.2000. | |||

