Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения целей, измерения координат и параметров движения обнаруженных целей.
Известны активные гидролокаторы, содержащие акустические излучающую и приемную антенны, устройство формирования зондирующего сигнала, генераторное устройство, блок синхронизации, устройство формирования характеристик направленности, блок измерения времени задержки эхосигнала от цели относительно момента излучения зондирующего сигнала, блок измерения угла прихода эхосигнала в вертикальной плоскости, блок вертикального разреза скорости звука (Справочник по гидроакустике. А.П.Евтютов, А.Е.Колесников, Е.А.Корепин и др. 2-е изд. - Л.: Судостроение, 1988, с.22, 24, 54-57, Митько В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства связи и наблюдения. - Л.: Судостроение, 1982, с.26, 27). В этих активных гидролокаторах отсутствует блок измерения глубины цели и, следовательно, не производится измерение координаты цели по глубине.
Известен активный гидролокатор, в котором используется блок измерения глубины обнаруженной цели (Antman H.S. Computer plotting of sound ray paths. - "Undersea Technology", 1971, vol.12, N7, p.21-23). В рассматриваемом в этой статье активном гидролокаторе измерение глубины цели производится без учета рефракции акустических лучей. Это приводит к существенным ошибкам в измерении глубины цели (А.П.Сташкевич. Акустика моря. - Л.: Судостроение, 1966, с.266).
Известен активный гидролокатор (Физические основы подводной акустики / Под редакцией В.И.Мясищева, М.: Сов. радио, 1955 г., с.86, А.П.Сташкевич. Акустика моря. - Л.: Судостроение, 1966, с.263-266), в котором производится измерение глубины цели с учетом рефракции акустических лучей только при малых дистанциях до обнаруженной цели.
Наиболее близким аналогом является активный гидролокатор, содержащий излучающую и приемную акустические антенны, генераторное устройство, устройство синхронизации, устройство формирования характеристик направленности, блок измерения τ времени задержки эхосигнала от цели относительно момента излучения зондирующего сигнала, блок измерения угла прихода эхосигнала в вертикальной плоскости, блок вертикального разреза скорости звука, последовательно соединенные вычислитель, определяющий прогнозные времена задержки эхосигнала ti относительно момента излучения зондирующего сигнала для набора возможных глубин цели Hi, блок разности, определяющий Δτi=ti-τ и блок измерения глубины цели, причем выход генераторного устройства соединен с излучающей акустической антенной, вход устройства формирования характеристики направленности соединен с приемной акустической антенной, входы блока измерения г и блока измерения угла прихода эхосигнала в вертикальной плоскости соединены с выходом устройства формирования характеристик направленности, соответствующие выходы устройства синхронизации соединены со входом генераторного устройства и вторым входом блока измерения τ, первый вход вычислителя соединен с выходом блока измерения угла прихода эхосигнала в вертикальной плоскости, второй его вход соединен с выходом блока вертикального разреза скорости звука, второй вход блока разности соединен с выходом блока измерения τ, а выход блока разности соединен с входом блока измерения глубины цели Нц, определяемой из набора возможных глубин Hi, при которой величина Δτi является наименьшей по модулю.
Рассмотренное устройство позволяет определить глубину цели с учетом рефракции для больших дистанций. Однако недостатком устройства-прототипа является возможность его использования только для случая однолучевого распространения эхосигнала.
Техническим результатом изобретения является повышение точности измерения глубины цели при многолучевом распространении сигнала путем обеспечения возможности разделения эхосигналов по нескольким лучам и измерения значений глубины цели по этим лучам, а также осреднения измеренных значений глубины цели по нескольким лучам.
Для достижения указанного технического результата в активный гидролокатор, содержащий излучающую и приемную акустические антенны, устройство формирования зондирующего сигнала, генераторное устройство, устройство синхронизации, устройство формирования характеристик направленности, блок измерения τ1 времени задержки эхосигнала от цели относительно момента излучения зондирующего сигнала, блок вертикального разреза скорости звука, последовательно соединенные блок измерения γ1, где γ1 - угол прихода эхосигнала в вертикальной плоскости, вычислитель t1,i, где t1,i - прогнозные времена задержки эхосигнала относительно момента излучения зондирующего сигнала для набора возможных глубин цели Hi, блок разности Δτ1,i, где Δτ1,i=t1,i-τ1 и блок измерения глубины цели
Нц1, определяемой из набора возможных глубин Hi, причем выход генераторного устройства соединен с излучающей акустической антенной, первый выход устройства синхронизации соединен с входом устройства формирования зондирующего сигнала, первый выход устройства формирования зондирующего сигнала соединен с входом генераторного устройства, вход устройства формирования характеристик направленности соединен с приемной акустической антенной, второй выход устройства синхронизации соединен с первым входом блока измерения τ1, второй вход вычислителя t1,i соединен с выходом блока вертикального разреза скорости звука, второй вход блока разности Δτ1,i соединен с выходом блока измерения τ1, введены новые признаки, а именно: последовательно соединенные устройство согласованной фильтрации, устройство обнаружения эхосигналов от цели и устройство выделения эхосигналов по лучам, а также N-1 блоков измерения τк  , где τк - время задержки к-го эхосигнала от цели относительно момента излучения зондирующего сигнала, N-1 блоков измерения γк, где γк - угол прихода к-го эхосигнала в вертикальной плоскости, N-1 вычислителей tк,i, где tк,i - прогнозные времена задержки к-го эхосигнала относительно момента излучения зондирующего сигнала для набора возможных глубин цели Hi, N-1 блоков разности Δτк,i, где Δτк,i=tк,i-τк, N-1 блоков измерения глубины цели Нцк, определяемой из набора возможных глубин Hi, и блок определения глубины цели, определяемой из набора глубин Нцк, при этом выход устройства формирования характеристик направленности соединен с первым входом устройства согласованной фильтрации, второй выход устройства формирования зондирующего сигнала соединен с втором входом устройства согласованной фильтрации, второй выход устройства синхронизации соединен с первыми входами N-1 блоков измерения τк, вторые входы N блоков измерения τк и входы N блоков измерения γк соединены с соответствующими N выходами устройства выделения эхосигналов по лучам, первые входы N-1 вычислителей γк соединены с соответствующими выходами N-1 блоков измерения γк, вторые входы N-1 вычислителей tк,i соединены с выходом блока вертикального разреза скорости звука, выходы N-1 вычислителей tк,i соединены с соответствующими первыми входами N-1 блоков разности Δτк,i, вторые входы N-1 блоков разности Δτк,i соединены с соответствующими выходами N-1 блоков измерения τк, выходы N-1 блоков разности
, где τк - время задержки к-го эхосигнала от цели относительно момента излучения зондирующего сигнала, N-1 блоков измерения γк, где γк - угол прихода к-го эхосигнала в вертикальной плоскости, N-1 вычислителей tк,i, где tк,i - прогнозные времена задержки к-го эхосигнала относительно момента излучения зондирующего сигнала для набора возможных глубин цели Hi, N-1 блоков разности Δτк,i, где Δτк,i=tк,i-τк, N-1 блоков измерения глубины цели Нцк, определяемой из набора возможных глубин Hi, и блок определения глубины цели, определяемой из набора глубин Нцк, при этом выход устройства формирования характеристик направленности соединен с первым входом устройства согласованной фильтрации, второй выход устройства формирования зондирующего сигнала соединен с втором входом устройства согласованной фильтрации, второй выход устройства синхронизации соединен с первыми входами N-1 блоков измерения τк, вторые входы N блоков измерения τк и входы N блоков измерения γк соединены с соответствующими N выходами устройства выделения эхосигналов по лучам, первые входы N-1 вычислителей γк соединены с соответствующими выходами N-1 блоков измерения γк, вторые входы N-1 вычислителей tк,i соединены с выходом блока вертикального разреза скорости звука, выходы N-1 вычислителей tк,i соединены с соответствующими первыми входами N-1 блоков разности Δτк,i, вторые входы N-1 блоков разности Δτк,i соединены с соответствующими выходами N-1 блоков измерения τк, выходы N-1 блоков разности
Δτк,i соединены с соответствующими входами N-1 блоков измерения глубины цели Нцк, выходы N блоков измерения глубины цели Нцк соединены со входом блока определения глубины цели.
Сущность изобретения поясняется на чертеже, где приведена блок-схема предложенного активного гидролокатора.
Активный гидролокатор содержит излучающую 1 и приемную 2 акустические антенны, генераторное устройство 3, устройство 4 формирования зондирующего сигнала, устройство синхронизации 5, устройство 6 формирования характеристик направленности, устройство 7 согласованной фильтрации, устройство 8 обнаружения эхосигналов от цели, устройство 9 выделения эхосигналов по лучам, блоки 101, 102 … 10N измерения τк , где τк - время задержки к-го эхосигнала от цели относительно момента излучения зондирующего сигнала, блоки 111, 112 … 11N измерения γк, где γк - угол прихода к-го эхосигнала в вертикальной плоскости, блок 12 вертикального разреза скорости звука, 131, 132 … 13N вычислители tк,i, где tк,i - прогнозные времена задержки к-го эхосигнала относительно момента излучения зондирующего сигнала для набора возможных глубин цели Hi, блоки 141, 142 … 14N разности Δτк,i, где Δτк,i=tк,i-τк, блоки 151, 152 … 15N измерения глубины цели Нцк, определяемой из набора возможных глубин Hi, и блок 16 определения глубины цели, определяемой из набора глубин Нцк.
Работа устройства осуществляется следующим образом. Устройство 4 формирования зондирующего сигнала вырабатывает зондирующие сигналы с внутриимпульсной модуляцией или сложные сигналы, т.е. сигналы с высокой разрешающей способностью по времени, что дает возможность выделить эхосигналы по отдельным лучам. Устройство 4 выдает также опорный сигнал в устройство 7 согласованной фильтрации. Гидролокатор производит излучение зондирующего сигнала с помощью генераторного устройства 3 и излучающей акустической антенны 1. Отраженный от цели эхосигнал с выхода приемной акустической антенны 2 поступает на устройство 6 формирования характеристик направленности в горизонтальной и вертикальной плоскостях. С выхода устройства 6 формирования характеристик направленности принятый сигнал поступает на устройство 7 согласованной фильтрации, обеспечивающее сжатие отраженных эхосигналов во времени, т.е. реализацию высокой разрешающей способности гидролокатора по времени, и устройство 8 обнаружения эхосигналов от цели. При обнаружении эхосигналов от цели в устройстве 9 производится выделение из многолучевого отраженного эхосигнала отдельных к-х эхосигналов по лучам. Далее в блоках 101, 102 … 10N производится измерение соответствующих τк  времен задержки к-х эхосигналов от цели относительно момента излучения зондирующего сигнала и в соответствующих блоках 111, 112 … 11N производится измерение γк углов прихода к-х эхосигналов в вертикальной плоскости. Устройство синхронизации 5 управляет во времени работой генераторного устройства 3, излучением зондирующего сигнала и блоками 101, 102 … 10N, что позволяет измерять времена задержки к-х эхосигналов от цели относительно момента излучения зондирующего сигнала. В блоке 12 содержится база данных по вертикальным разрезам скорости звука для различных районов Мирового океана и различных времен года или этот блок может представлять собой измеритель скорости звука по глубине. В вычислителях 131, 132 … 13N определяются tк,i - прогнозные времена задержки к-х эхосигналов относительно момента излучения зондирующего сигнала для набора возможных глубин цели Hi. Прогнозные времена задержки определяются для указанных величин Hi, для измеренных величин γк углов прихода эхосигналов в вертикальной плоскости и вертикального разреза скорости звука по глубине. В блоках 141, 142 … 14N определяются разности между величинами измеренных и прогнозных времен задержки эхосигнала относительно момента излучения зондирующего сигнала Δτк,i=tк,i-τк. В блоках 151, 152 … 15N производится измерение глубины цели Нцк, определяемой из набора возможных глубин Hi, при которой величина разности Δτк,i является наименьшей по модулю. В блоке 16 производится определение глубины цели из набора глубин Нцк, например, как среднее арифметическое величин глубин Нцк.
времен задержки к-х эхосигналов от цели относительно момента излучения зондирующего сигнала и в соответствующих блоках 111, 112 … 11N производится измерение γк углов прихода к-х эхосигналов в вертикальной плоскости. Устройство синхронизации 5 управляет во времени работой генераторного устройства 3, излучением зондирующего сигнала и блоками 101, 102 … 10N, что позволяет измерять времена задержки к-х эхосигналов от цели относительно момента излучения зондирующего сигнала. В блоке 12 содержится база данных по вертикальным разрезам скорости звука для различных районов Мирового океана и различных времен года или этот блок может представлять собой измеритель скорости звука по глубине. В вычислителях 131, 132 … 13N определяются tк,i - прогнозные времена задержки к-х эхосигналов относительно момента излучения зондирующего сигнала для набора возможных глубин цели Hi. Прогнозные времена задержки определяются для указанных величин Hi, для измеренных величин γк углов прихода эхосигналов в вертикальной плоскости и вертикального разреза скорости звука по глубине. В блоках 141, 142 … 14N определяются разности между величинами измеренных и прогнозных времен задержки эхосигнала относительно момента излучения зондирующего сигнала Δτк,i=tк,i-τк. В блоках 151, 152 … 15N производится измерение глубины цели Нцк, определяемой из набора возможных глубин Hi, при которой величина разности Δτк,i является наименьшей по модулю. В блоке 16 производится определение глубины цели из набора глубин Нцк, например, как среднее арифметическое величин глубин Нцк.
Таким образом, повышение точности измерения глубины цели при многолучевом распространении сигнала достигается путем обеспечения возможности разделения эхосигналов по отдельным лучам за счет реализации высокой разрешающей способности по времени, повышения в этом случае точности измерения времени задержки эхосигналов от цели относительно момента излучения зондирующего сигнала и точности измерения углов прихода эхосигналов в вертикальной плоскости, а также обеспечения возможности измерения глубины цели по отдельным лучам и осреднения результатов измерения глубины цели по этим лучам.
Практическое исполнение блоков, входящих в изобретение, известно из практики гидроакустики. Устройство 4 формирования зондирующего сигнала может быть реализовано с применением генератора частотно-модулированных сигналов, см., например, Справочник по гидроакустике. А.П.Евтютов, А.Е.Колесников, Е.А.Корепин и др. 2-е изд. - Л.: Судостроение, 1988. с.22. Устройство 7 согласованной фильтрации может быть реализовано с применением быстрого преобразования Фурье, см., например, Применение цифровой обработки сигналов / Под ред. Э.Оппенгейма, перевод с англ. Под ред. А.М.Рязанцева. - М.: Мир, 1980, с.281, 294, 391. Устройство 8 обнаружения эхосигналов от цели может быть реализовано с применением решающего (порогового) устройства, см. например, Гидроакустические средства связи и наблюдения. - Л.: Судостроение, 1982, с.54-62 и Проектирование импульсных и цифровых устройств радиотехнических систем / Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др. / Под ред. Ю.М.Казаринова. - М.: Высш. шк., 1985. - с.129. Устройство 9 выделения эхосигналов по лучам может быть реализовано с применением обнаружителей импульсов с неизвестным временным положением, см., например, Проектирование импульсных и цифровых устройств радиотехнических систем / Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др. / Под ред. Ю.М.Казаринова. - М.: Высш. шк., 1985. - с.136-142. Блок 16 выполняется с использованием сумматора, см. например, Проектирование импульсных и цифровых устройств радиотехнических систем / Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др. / Под ред. Ю.М.Казаринова. - М.: Высш. шк., 1985. - c.15, 19.
Блоки 10к, 11к, 12к, 13к, 14к аналогичны соответствующим блокам прототипа, а именно, блоку измерения τ времени задержки эхосигнала от цели относительно момента излучения зондирующего сигнала, блоку измерения угла прихода эхосигнала в вертикальной плоскости, вычислителю, определяющему прогнозные времена задержки эхосигнала ti относительно момента излучения зондирующего сигнала, блоку разности и блоку измерения глубины цели
Использование устройства согласованной фильтрации, устройства обнаружения эхосигналов от цели, устройства выделения эхосигналов по лучам, устройств, обеспечивающих измерение глубины цели по нескольким лучам, а также устройства для осреднения результатов измерения глубины цели по нескольким лучам обеспечивает повышение точности измерения глубины цели.
Таким образом, поставленная задача успешно решается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Активный гидролокатор | 2017 |
|
RU2654366C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2007 |
|
RU2346295C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ПРИВОДНЯЮЩЕГОСЯ ОБЪЕКТА | 2011 |
|
RU2478983C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2016 |
|
RU2625041C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2545326C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НИЖНЕЙ ТОЧКИ АЙСБЕРГА | 2015 |
|
RU2603831C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2014 |
|
RU2553730C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2015 |
|
RU2590226C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НЕПОДВИЖНОГО ОБЪЕКТА | 2015 |
|
RU2590932C1 |
| Способ измерения глубины погружения объекта | 2022 |
|
RU2789811C1 |
Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения целей, измерения координат и параметров движения обнаруженных целей. Техническим результатом изобретения является повышение точности измерения глубины цели при многолучевом распространении сигнала в условиях рефракции. Повышение точности измерения глубины цели при многолучевом распространении сигнала достигается путем обеспечения возможности разделения эхосигналов по отдельным лучам за счет реализации высокой разрешающей способности по времени, повышения в этом случае точности измерения времени задержки эхосигналов от цели относительно момента излучения зондирующего сигнала и точности измерения углов прихода эхосигналов в вертикальной плоскости, а также обеспечения возможности измерения глубины цели по отдельным лучам и осреднения результатов измерения глубины цели по этим лучам. 1 ил.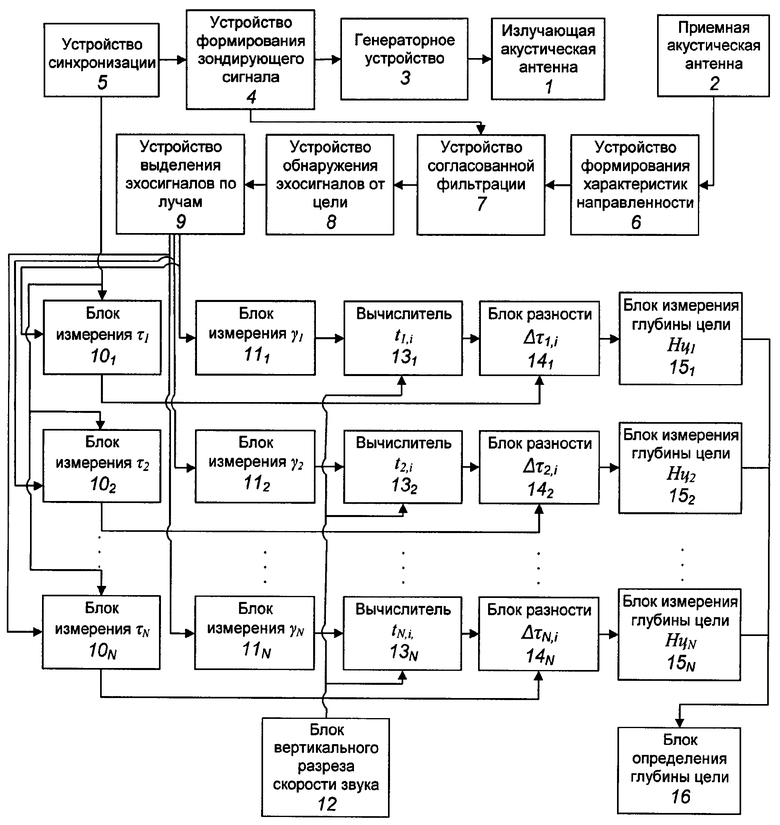
Активный гидролокатор, содержащий излучающую и приемную акустические антенны, устройство формирования зондирующего сигнала, генераторное устройство, устройство синхронизации, устройство формирования характеристик направленности, блок измерения τ1 времени задержки эхосигнала от цели относительно момента излучения зондирующего сигнала, блок вертикального разреза скорости звука, последовательно соединенные блок измерения γ1, где γ1 - угол прихода эхосигнала в вертикальной плоскости, вычислитель t1,i, где t1,i - прогнозные времена задержки эхосигнала относительно момента излучения зондирующего сигнала для набора возможных глубин цели Hi, блок разности Δτ1,i, где Δτ1,i-τ1, и блок измерения глубины цели Нц1, определяемой из набора возможных глубин Hi, причем выход генераторного устройства соединен с излучающей акустической антенной, первый выход устройства синхронизации соединен с входом устройства формирования зондирующего сигнала, первый выход устройства формирования зондирующего сигнала соединен с входом генераторного устройства, вход устройства формирования характеристик направленности соединен с приемной акустической антенной, второй выход устройства синхронизации соединен с первым входом блока измерения τ1, второй вход вычислителя t1,i соединен с выходом блока вертикального разреза скорости звука, второй вход блока разности Δτ1,i соединен с выходом блока измерения τ1, отличающийся тем, что в него введены последовательно соединенные устройство согласованной фильтрации, устройство обнаружения эхосигналов от цели и устройство выделения эхосигналов по лучам, а также N-1 блоков измерения τк  , где τк - время задержки к-го эхосигнала от цели относительно момента излучения зондирующего сигнала, N-1 блоков измерения γк, где γк - угол прихода к-го эхосигнала в вертикальной плоскости, N-1 вычислителей tк,i, где tк,i - прогнозные времена задержки к-го эхосигнала относительно момента излучения зондирующего сигнала для набора возможных глубин цели Hi, N-1 блоков разности Δτк,i где Δτк,i=tк,i-τк, N-1 блоков измерения глубины цели Нцк, определяемой из набора возможных глубин Hi, и блок определения глубины цели, определяемой из набора глубин Нцк, при этом выход устройства формирования характеристик направленности соединен с первым входом устройства согласованной фильтрации, второй выход устройства формирования зондирующего сигнала соединен со вторым входом устройства согласованной фильтрации, второй выход устройства синхронизации соединен с первыми входами N-1 блоков измерения τк, вторые входы N блоков измерения τк и входы N блоков измерения γк соединены с соответствующими N выходами устройства выделения эхосигналов по лучам, первые входы N-1 вычислителей tк,i соединены с соответствующими выходами N-1 блоков измерения γк, вторые входы N-1 вычислителей tк,i соединены с выходом блока вертикального разреза скорости звука, выходы N-1 вычислителей tк,i соединены с соответствующими первыми входами N-1 блоков разности Δτк,i, вторые входы N-1 блоков разности Δτк,i соединены с соответствующими выходами N-1 блоков измерения τк, выходы N-1 блоков разности Δτк,i соединены с соответствующими входами N-1 блоков измерения глубины цели Нцк, выходы N блоков измерения глубины цели Нцк соединены со входом блока определения глубины цели.
, где τк - время задержки к-го эхосигнала от цели относительно момента излучения зондирующего сигнала, N-1 блоков измерения γк, где γк - угол прихода к-го эхосигнала в вертикальной плоскости, N-1 вычислителей tк,i, где tк,i - прогнозные времена задержки к-го эхосигнала относительно момента излучения зондирующего сигнала для набора возможных глубин цели Hi, N-1 блоков разности Δτк,i где Δτк,i=tк,i-τк, N-1 блоков измерения глубины цели Нцк, определяемой из набора возможных глубин Hi, и блок определения глубины цели, определяемой из набора глубин Нцк, при этом выход устройства формирования характеристик направленности соединен с первым входом устройства согласованной фильтрации, второй выход устройства формирования зондирующего сигнала соединен со вторым входом устройства согласованной фильтрации, второй выход устройства синхронизации соединен с первыми входами N-1 блоков измерения τк, вторые входы N блоков измерения τк и входы N блоков измерения γк соединены с соответствующими N выходами устройства выделения эхосигналов по лучам, первые входы N-1 вычислителей tк,i соединены с соответствующими выходами N-1 блоков измерения γк, вторые входы N-1 вычислителей tк,i соединены с выходом блока вертикального разреза скорости звука, выходы N-1 вычислителей tк,i соединены с соответствующими первыми входами N-1 блоков разности Δτк,i, вторые входы N-1 блоков разности Δτк,i соединены с соответствующими выходами N-1 блоков измерения τк, выходы N-1 блоков разности Δτк,i соединены с соответствующими входами N-1 блоков измерения глубины цели Нцк, выходы N блоков измерения глубины цели Нцк соединены со входом блока определения глубины цели.
| Устройство для транспортирования и складирования сыпучих материалов, выгружаемых из вагонов | 1947 |
|
SU75061A1 |
| Способ укладки железнодорожного пути | 1948 |
|
SU75060A1 |
| ЭХОЛОКАТОР | 1990 |
|
RU2020511C1 |
| JP 2008232861 A, 02.10.2008 | |||
| JP 2008216005 A, 18.09.2008 | |||
| Устройство для измерения электростатического заряда при трении | 1987 |
|
SU1500953A1 |

