Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов.
Известен активный гидролокатор, содержащий последовательно соединенные генераторное устройство и излучающую акустическую антенну, последовательно соединенные приемную акустическую антенну и устройство формирования характеристики направленности в приеме, также содержащий устройство управления, устройство отображения информации, устройство формирования тонального зондирующего сигнала, последовательно соединенные устройство согласованной фильтрации тонального эхосигнала и устройство обнаружения тонального эхосигнала, также содержащий устройство оценки дальности до объекта по тональному эхосигналу, устройство оценки курсового угла на объект по тональному эхосигналу, устройство оценки радиальной скорости объекта по тональному эхосигналу, причем второй выход устройства согласованной фильтрации тонального эхосигнала соединен со входами устройства оценки дальности до объекта по тональному эхосигналу, устройства оценки курсового угла на объект по тональному эхосигналу и устройства оценки радиальной скорости объекта по тональному эхосигналу. (Справочник по гидроакустике. Евтютов А.П., Колесников А.Е., Корепин Е.А. и др. 2-е изд. Л.: Судостроение, 1988. С.20,22 п.4,23).
Недостатком этого гидролокатора является то, что при использовании тональных зондирующих сигналов низка помехоустойчивость обнаружения эхосигналов на фоне реверберационной помехи при малых радиальных скоростях отражающего объекта. Кроме того, ошибки определения дальности до объекта растут при увеличении длительности тональных зондирующих сигналов, которое необходимо для обнаружения объекта на значительных дистанциях.
Известен активный гидролокатор, содержащий последовательно соединенные генераторное устройство и излучающую акустическую антенну, последовательно соединенные приемную акустическую антенну и устройство формирования характеристики направленности в приеме, также содержащий устройство управления, устройство отображения информации, устройство формирования сложного зондирующего сигнала, последовательно соединенные устройство согласованной фильтрации сложного эхосигнала и устройство обнаружения сложного эхосигнала, также содержащий устройство оценки дальности до объекта по сложному эхосигналу, устройство оценки курсового угла на объект по сложному эхосигналу, устройство оценки радиальной скорости объекта по сложному эхосигналу, причем второй выход устройства согласованной фильтрации сложного эхосигнала соединен со входами устройства оценки дальности до объекта по сложному эхосигналу, устройства оценки курсового угла на объект по сложному эхосигналу и устройства оценки радиальной скорости объекта по сложному эхосигналу. (Справочник по гидроакустике. Евтютов А.П., Колесников А.Е., Корепин Е.А. и др. 2-е изд. Л.: Судостроение, 1988. С.20,22 п.3).
Преимуществом данного гидролокатора по сравнению с предыдущим является существенно более высокая помехоустойчивость обнаружения эхосигналов на фоне реверберационной помехи при малых радиальных скоростях отражающего объекта за счет высокой разрешающей способности сложного сигнала по дальности, а также существенно меньшие ошибки определения дальности до объекта, величины которых не зависят от длительности сложного сигнала, а определяются шириной полосы сложного сигнала. С другой стороны, данный гидролокатор имеет более низкую помехоустойчивость обнаружения эхосигналов на фоне реверберационной помехи при больших радиальных скоростях отражающего объекта. Кроме того, ошибки определения радиальной скорости объекта для гидролокатора со сложным зондирующим сигналом с частотной модуляцией больше, чем ошибки определения радиальной скорости объекта для гидролокатора с тональным зондирующим сигналом. Таким образом, у каждого из этих двух гидролокаторов при обнаружении объектов на фоне реверберационной помехи, измерении координат и параметров движения обнаруженных объектов имеются свои преимущества и недостатки.
Однако в ряде случаев требуется, при неизвестной радиальной скорости объекта, решить указанные задачи при излучении только одной посылки. Подчеркнем, что решение задачи усложняется из-за того, что радиальная скорость объекта зависит не только от величины неизвестной априори полной скорости объекта, но и от неизвестного ракурса отражающего объекта по отношению к кораблю-носителю гидролокатора, а также из-за того, что априори неизвестна интенсивность реверберационной помехи.
Техническим результатом изобретения является обеспечение возможности, при неизвестной радиальной скорости объекта, обнаружения объектов на фоне реверберационной помехи, определения с повышенной точностью координат и параметров движения обнаруженных объектов при излучении только одной посылки.
Для достижения этого технического результата предлагается активный гидролокатор, содержащий последовательно соединенные генераторное устройство и излучающую акустическую антенну, последовательно соединенные приемную акустическую антенну и устройство формирования характеристики направленности в приеме, также содержащий устройство управления, устройство отображения информации, устройство формирования тонального зондирующего сигнала, последовательно соединенные устройство согласованной фильтрации тонального эхосигнала и устройство обнаружения тонального эхосигнала, также содержащий устройство оценки дальности до объекта по тональному эхосигналу, устройство оценки курсового угла на объект по тональному эхосигналу, устройство оценки радиальной скорости объекта по тональному эхосигналу, причем второй выход устройства согласованной фильтрации тонального эхосигнала соединен со входами устройства оценки дальности до объекта по тональному эхосигналу, устройства оценки курсового угла на объект по тональному эхосигналу и устройства оценки радиальной скорости объекта по тональному эхосигналу, также содержащий устройство формирования сложного зондирующего сигнала, последовательно соединенные устройство согласованной фильтрации сложного эхосигнала и устройство обнаружения сложного эхосигнала, также содержащий устройство оценки дальности до объекта по сложному эхосигналу, устройство оценки курсового угла на объект по сложному эхосигналу, устройство оценки радиальной скорости объекта по сложному эхосигналу, причем второй выход устройства согласованной фильтрации сложного эхосигнала соединен со входами устройства оценки дальности до объекта по сложному эхосигналу, устройства оценки курсового угла на объект по сложному эхосигналу и устройства оценки радиальной скорости объекта по сложному эхосигналу, при этом первый и второй выходы устройства управления соединены со вторыми входами устройства оценки дальности до объекта по тональному эхосигналу и устройства оценки дальности до объекта по сложному эхосигналу соответственно, а первый выход устройства формирования сложного зондирующего сигнала соединен с первым входом устройства согласованной фильтрации сложного эхосигнала, при этом активный гидролокатор также содержит устройство выбора интервала между средними частотами тонального и сложного зондирующих сигналов, устройство коммутации, устройство разделения обработки тонального и сложного сигналов по частоте, устройство определения дальности до объекта, устройство определения курсового угла на объект, устройство определения радиальной скорости объекта, также содержит последовательно соединенные устройство идентификации обнаруженных эхосигналов и устройство принятия решения об обнаружении объекта, причем третий, четвертый, пятый выходы устройства управления соединены с первыми входами устройства коммутации, устройства формирования тонального зондирующего сигнала и устройства формирования сложного зондирующего сигнала соответственно, первый, второй, третий, четвертый выходы устройства выбора интервала между средними частотами тонального и сложного зондирующих сигналов соединены со вторыми входами устройства формирования тонального зондирующего сигнала, устройства формирования сложного зондирующего сигнала, устройства оценки радиальной скорости объекта по тональному эхосигналу и устройства оценки радиальной скорости объекта по сложному эхосигналу соответственно, выход устройства формирования тонального зондирующего сигнала и второй выход устройства формирования сложного зондирующего сигнала соединены со вторым и третьим входами устройства коммутации соответственно, а выход устройства коммутации соединен со входом генераторного устройства, выход устройства формирования характеристики направленности в приеме соединен со входом устройства разделения обработки тонального и сложного сигналов по частоте, а первый и второй выходы последнего соединены со входом устройства согласованной фильтрации тонального эхосигнала и вторым входом устройства согласованной фильтрации сложного эхосигнала соответственно, первые выходы устройства оценки дальности до объекта по тональному эхосигналу, устройства оценки курсового угла на объект по тональному эхосигналу, устройства оценки радиальной скорости объекта по тональному эхосигналу соединены с первыми входами устройства определения дальности до объекта, устройства определения курсового угла на объект, устройства определения радиальной скорости объекта соответственно, первые выходы устройства оценки дальности до объекта по сложному эхосигналу, устройства оценки курсового угла на объект по сложному эхосигналу, устройства оценки радиальной скорости объекта по сложному эхосигналу соединены со вторыми входами устройства определения дальности до объекта, устройства определения курсового угла на объект, устройства определения радиальной скорости объекта соответственно, вторые выходы устройства оценки дальности до объекта по тональному эхосигналу, устройства оценки курсового угла на объект по тональному эхосигналу, устройства оценки радиальной скорости объекта по тональному эхосигналу соединены с первым, вторым и третьим входами устройства идентификации обнаруженных эхосигналов соответственно, вторые выходы устройства оценки дальности до объекта по сложному эхосигналу, устройства оценки курсового угла на объект по сложному эхосигналу, устройства оценки радиальной' скорости объекта по сложному эхосигналу соединены с четвертым, пятым и шестым входами устройства идентификации обнаруженных эхосигналов соответственно, а седьмой и восьмой его входы соединены с выходами устройства обнаружения тонального эхосигнала и устройства обнаружения сложного эхосигнала соответственно, первый выход устройства принятия решения об обнаружении объекта соединен с третьими входами устройства определения дальности до объекта, устройства определения курсового угла на объект, устройства определения радиальной скорости объекта, а второй его выход соединен с первым входом устройства отображения информации, выходы устройства определения дальности до объекта, устройства определения курсового угла на объект, устройства определения радиальной скорости объекта соединены со вторым, третьим и четвертым входами устройства отображения информации.
Новыми признаками, неизвестными из рассмотренных аналогов, являются устройство выбора интервала между средними частотами тонального и сложного зондирующих сигналов, устройство коммутации, устройство разделения обработки тонального и сложного сигналов по частоте, устройство определения дальности до объекта, устройство определения курсового угла на объект, устройство определения радиальной скорости объекта, также последовательно соединенные и устройство идентификации обнаруженных эхосигналов и устройство принятия решения об обнаружении объекта, а также связи этих новых блоков между собой и с известными блоками гидролокатора.
Указанный результат достигается путем обеспечения возможности излучения тонального и сложного зондирующих сигналов в одной посылке, приема соответствующих эхосигналов в одном цикле приема, разделения излучения и обработки тонального и сложного сигналов по частоте (для исключения взаимовлияния реверберационных помех от тонального и сложного зондирующих сигналов на прием каждого из эхосигналов), определения по одной посылке дальности до объекта, курсового угла на объект, радиальной скорости объекта с повышенной точностью на основе результатов оценки соответствующих параметров тонального и сложного эхосигналов, с учетом точности этих оценок.
Сущность изобретения поясняется на фиг.1, где приведена блок-схема предложенного активного гидролокатора.
Активный гидролокатор содержит последовательно соединенные генераторное устройство 8 и излучающую акустическую антенну 1, последовательно соединенные приемную акустическую антенну 2, устройство 9 формирования характеристики направленности в приеме и устройство 10 разделения обработки тонального и сложного сигналов по частоте, устройство управления 3, также содержит устройство 4 формирования тонального зондирующего сигнала, устройство 5 формирования сложного зондирующего сигнала, устройство 6 выбора интервала между средними частотами тонального и сложного зондирующих сигналов, устройство 7 коммутации, последовательно соединенные устройство 11 согласованной фильтрации тонального эхосигнала и устройство 12 обнаружения тонального эхосигнала, также содержит устройство 13 оценки дальности до объекта по тональному эхосигналу, устройство 14 оценки курсового угла на объект по тональному эхосигналу, устройство 15 оценки радиальной скорости объекта по тональному эхосигналу, также содержит последовательно соединенные устройство 16 согласованной фильтрации сложного эхосигнала и устройство 17 обнаружения сложного эхосигнала, устройство 18 оценки дальности до объекта по сложному эхосигналу, устройство 19 оценки курсового угла на объект по сложному эхосигналу, устройство 20 оценки радиальной скорости объекта по сложному эхосигналу, также содержит устройство 21 определения дальности до объекта, устройство 22 определения курсового угла на объект, устройство 23 определения радиальной скорости объекта, также содержит последовательно соединенные устройство 24 идентификации обнаруженных эхосигналов, устройство 25 принятия решения об обнаружении объекта и устройство 26 отображения информации.
Практическое исполнение блоков, входящих в изобретение, известно из практики гидроакустики и реализуется на основе применения цифровых устройств.
Блоки 6, 25 могут быть реализованы на основе технических решений, приведенных в книге Цифровые радионавигационные устройства / В.В. Барашенков, А.Е. Лутченко, Е.М. Скороходов и др.; под ред. В.Б. Смолова. М.: Сов. радио, 1980. раздел 5.4.
Блок 7 может быть реализован на основе технических решений, приведенных в книге Проектирование импульсных и цифровых устройств радиотехнических систем. / Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др.; под ред. Ю.М. Казаринова. М.: Высшая школа, 1985. С.9,10.
Блок 10 может быть реализован на основе технических решений, приведенных в книге Проектирование импульсных и цифровых устройств радиотехнических систем. / Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др.; под ред. Ю.М. Казаринова. М.: Высшая школа, 1985. С.293-299.
Блоки 21, 22, 23, 24 могут быть выполнены с использованием схем сравнения, см. например, книгу Проектирование импульсных и цифровых устройств радиотехнических систем. / Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др.; Под ред. Ю.М. Казаринова. - М.: Высш. шк., 1985. С.15-18.
Работа устройства осуществляется следующим образом.
Устройства 4, 5 формируют тональный и сложный зондирующие сигналы соответственно. Средние частоты тонального и сложного зондирующих сигналов разносятся на определенный интервал для исключения взаимовлияния реверберационных помех от тонального и сложного зондирующих сигналов на прием каждого из этих эхосигналов. Выбор этого интервала производится в блоке 6 таким образом, чтобы реверберационная помеха от сложного сигнала (ширина спектра этой помехи равна ширине полосы сложного сигнала) не попадала в полосу приема тонального сигнала и чтобы реверберационная помеха от тонального сигнала (ширина спектра этой помехи примерно в 4 раза больше ширины полосы тонального сигнала) не попадала в полосу приема сложного сигнала. Тональный и сложный зондирующие сигналы излучаются в одной посылке, например, последовательно во времени, друг за другом в цикле излучения. Управление излучением зондирующих сигналов обеспечивается блоками 3, 7. Гидролокатор производит излучение зондирующих сигналов с помощью генераторного устройства 8 и излучающей акустической антенны 1. Отраженные от объекта эхосигналы с выхода приемной акустической антенны 2 поступают на устройство 9. С выхода устройства 9 сигнальный процесс поступает на устройство 10, обеспечивающее разделение обработки тонального и сложного сигналов по частоте. Средние частоты тонального и сложного зондирующих сигналов разнесены, соответственно разнесены и средние частоты принимаемых тонального и сложного эхосигналов, средние частоты (и спектры) реверберационных помех от тонального и сложного зондирующих сигналов. Таким образом, могут и должны быть разделены по частоте полосы обработки принимаемых тонального и сложного эхосигналов, что выполняется с помощью блока 10 путем полосовой фильтрации. С одного выхода устройства 10 сигнальный процесс, соответствующий полосе обработки принимаемого тонального эхосигнала, поступает на вход блока 11, а с другого выхода устройства 10 сигнальный процесс, соответствующий полосе обработки принимаемого сложного эхосигнала, поступает на вход блока 16. На другой вход блока 16 из блока 5 поступает опорный сигнал, необходимый для согласованной фильтрации сложного эхосигнала.
С выходов блока 11, после согласованной фильтрации тонального эхосигнала сигнальные процессы поступают на входы блоков 12, 13, 14, 15. При обнаружении тонального эхосигнала в блоке 12, в блоках 13, 14, 15 выполняются оценки дальности до объекта, курсового угла на объект и радиальной скорости объекта по тональному эхосигналу соответственно. При этом оценка времени задержки тонального эхосигнала (для оценки дальности до объекта) производится относительно момента времени, соответствующего концу излучения тонального зондирующего сигнала, это определяется управлением из блока 3. С выходов блока 16 после согласованной фильтрации сложного эхосигнала сигнальные процессы поступают на входы блоков 17, 18, 19, 20. При обнаружении сложного эхосигнала в блоке 17, в блоках 18, 19, 20 выполняются оценки дальности до объекта, курсового угла на объект и радиальной скорости объекта по сложному эхосигналу соответственно. При этом оценка времени задержки сложного эхосигнала (для оценки дальности до объекта) производится относительно момента времени, соответствующего концу излучения сложного зондирующего сигнала, это определяется управлением из блока 3. В устройстве 24 по полученным из блоков 13, 14, 15, 18, 19, 20 данным определяются разности оценок дальностей по тональному и сложному эхосигналам, оценок курсового угла по тональному и сложному эхосигналам и оценок радиальной скорости по тональному и сложному эхосигналам. Если ни одна из этих разностей не превысила заданную (для каждой разности) пороговую величину, то в устройстве 25 принимается решение о том, что обнаруженные эхосигналы относятся к одному объекту.
В блоках 21, 22, 23 по решению об обнаружении объекта из устройства 25 и по оценкам параметров объекта из блоков 13, 14, 15, 18, 19, 20 определяются величины дальности до объекта, курсового угла на объект и радиальной скорости объекта с использованием оценок этих параметров, полученных по тональному и сложному эхосигналам. При этом реализуется, например, следующая процедура: в блоке 21 величина дальности до объекта определяется как оценка дальности по сложному сигналу, так как эта оценка имеет более высокую точность, чем оценка дальности по тональному сигналу; в блоке 22 величина курсового угла на объект определяется как среднеарифметическое оценок курсового угла по тональному и сложному сигналам, ошибки среднеарифметической величины курсового угла меньше, чем ошибки оценок курсового угла по тональному и сложному сигналам в отдельности; в блоке 23 величина радиальной скорости объекта определяется как оценка радиальной скорости по тональному эхосигналу, так как эта оценка имеет более высокую точность, чем оценка радиальной скорости по сложному сигналу с частотной модуляцией. Данные по обнаружению объекта и по величинам дальности до объекта, курсового угла на объект и радиальной скорости объекта из блоков 25, 21, 22, 23 соответственно поступают в устройство 26 отображения информации.
Использование устройства выбора интервала между средними частотами тонального и сложного зондирующих сигналов, устройства коммутации, устройства разделения обработки тонального и сложного сигналов по частоте, устройства определения дальности до объекта, устройства определения курсового угла на объект, устройства определения радиальной скорости объекта, также последовательно соединенных устройства идентификации обнаруженных эхосигналов и устройства принятия решения об обнаружении объекта, а также связи этих новых блоков между собой и с известными блоками гидролокатора обеспечивают возможность обнаружения с высокой вероятностью объектов на фоне реверберационной помехи, при неизвестной радиальной скорости отражающего объекта, определения с повышенной точностью координат и параметров движения обнаруженных объектов при излучении только одной посылки.
Указанный результат достигается путем обеспечения возможности излучения тонального и сложного зондирующих сигналов в одной посылке, приема соответствующих эхосигналов в одном цикле приема, разделения излучения и обработки тонального и сложного сигналов по частоте (для исключения взаимовлияния реверберационных помех от тонального и сложного зондирующих сигналов на прием каждого из эхосигналов), определения в одном цикле дальности до объекта, курсового угла на объект, радиальной скорости объекта на основе результатов оценки соответствующих параметров тонального и сложного эхосигналов, с учетом точности этих оценок.
Таким образом, поставленная задача успешно решается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Активный гидролокатор | 2019 |
|
RU2719214C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2015 |
|
RU2590226C1 |
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| Способ измерения дистанции гидролокатором до неподвижного объекта | 2022 |
|
RU2801678C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| Способ обработки и классификации гидролокационной информации | 2019 |
|
RU2725517C1 |
| Способ измерения глубины погружения объекта | 2022 |
|
RU2789811C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2019 |
|
RU2736097C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2545326C1 |
Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов. Техническим результатом изобретения является обеспечение возможности обнаружения с высокой вероятностью объектов на фоне реверберационной помехи, при неизвестной радиальной скорости отражающего объекта, определения с повышенной точностью координат и параметров движения обнаруженных объектов при излучении только одной посылки. 1 ил.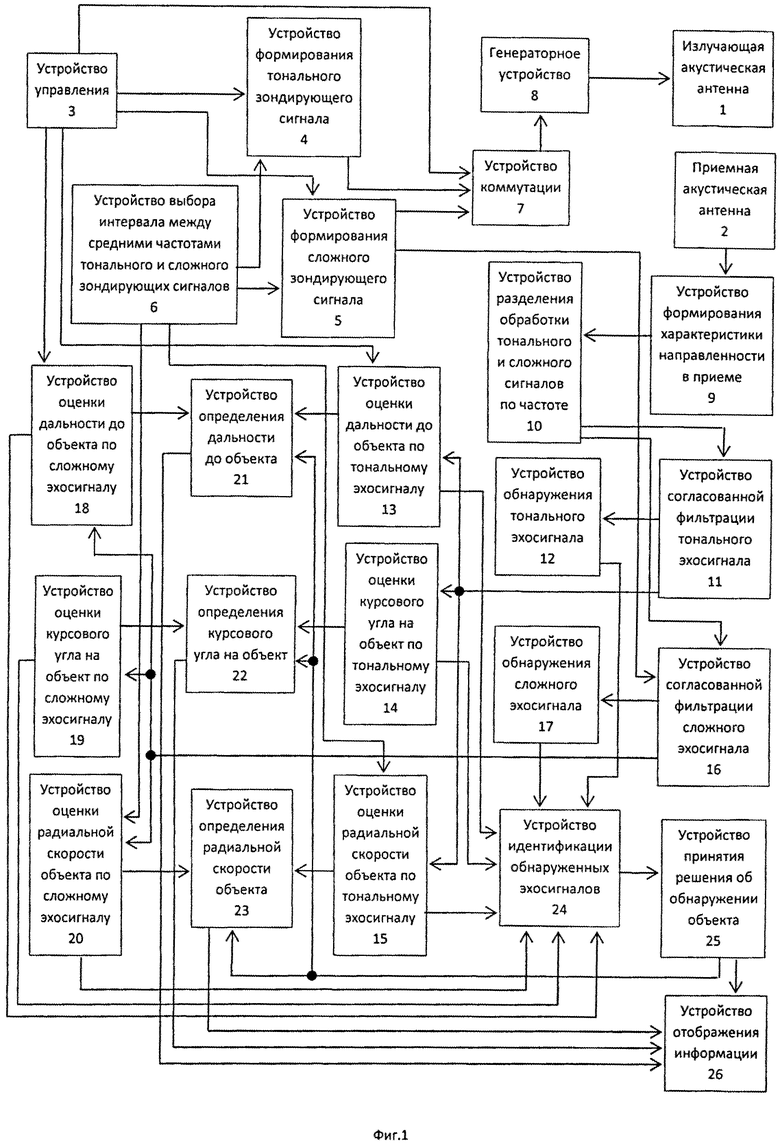
Активный гидролокатор, содержащий последовательно соединенные генераторное устройство и излучающую акустическую антенну, последовательно соединенные приемную акустическую антенну и устройство формирования характеристики направленности в приеме, также содержащий устройство управления, устройство отображения информации, устройство формирования тонального зондирующего сигнала, последовательно соединенные устройство согласованной фильтрации тонального эхосигнала и устройство обнаружения тонального эхосигнала, также содержащий устройство оценки дальности до объекта по тональному эхосигналу, устройство оценки курсового угла на объект по тональному эхосигналу, устройство оценки радиальной скорости объекта по тональному эхосигналу, причем второй выход устройства согласованной фильтрации тонального эхосигнала соединен со входами устройства оценки дальности до объекта по тональному эхосигналу, устройства оценки курсового угла на объект по тональному эхосигналу и устройства оценки радиальной скорости объекта по тональному эхосигналу, также содержащий устройство формирования сложного зондирующего сигнала, последовательно соединенные устройство согласованной фильтрации сложного эхосигнала и устройство обнаружения сложного эхосигнала, также содержащий устройство оценки дальности до объекта по сложному эхосигналу, устройство оценки курсового угла на объект по сложному эхосигналу, устройство оценки радиальной скорости объекта по сложному эхосигналу, причем второй выход устройства согласованной фильтрации сложного эхосигнала соединен со входами устройства оценки дальности до объекта по сложному эхосигналу, устройства оценки курсового угла на объект по сложному эхосигналу и устройства оценки радиальной скорости объекта по сложному эхосигналу, при этом первый и второй выходы устройства управления соединены со вторыми входами устройства оценки дальности до объекта по тональному эхосигналу и устройства оценки дальности до объекта по сложному эхосигналу соответственно, а первый выход устройства формирования сложного зондирующего сигнала соединен с первым входом устройства согласованной фильтрации сложного эхосигнала, при этом активный гидролокатор также содержит устройство выбора интервала между средними частотами тонального и сложного зондирующих сигналов, устройство коммутации, устройство разделения обработки тонального и сложного сигналов по частоте, устройство определения дальности до объекта, устройство определения курсового угла на объект, устройство определения радиальной скорости объекта, также содержит последовательно соединенные и устройство идентификации обнаруженных эхосигналов и устройство принятия решения об обнаружении объекта, причем третий, четвертый, пятый выходы устройства управления соединены с первыми входами устройства коммутации, устройства формирования тонального зондирующего сигнала и устройства формирования сложного зондирующего сигнала соответственно, первый, второй, третий, четвертый выходы устройства выбора интервала между средними частотами тонального и сложного зондирующих сигналов соединены со вторыми входами устройства формирования тонального зондирующего сигнала, устройства формирования сложного зондирующего сигнала, устройства оценки радиальной скорости объекта по тональному эхосигналу и устройства оценки радиальной скорости объекта по сложному эхосигналу соответственно, выход устройства формирования тонального зондирующего сигнала и второй выход устройства формирования сложного зондирующего сигнала соединены со вторым и третьим входами устройства коммутации соответственно, а выход устройства коммутации соединен со входом генераторного устройства, выход устройства формирования характеристики направленности в приеме соединен со входом устройства разделения обработки тонального и сложного сигналов по частоте, а первый и второй выходы последнего соединены со входом устройства согласованной фильтрации тонального эхосигнала и вторым входом устройства согласованной фильтрации сложного эхосигнала соответственно, первые выходы устройства оценки дальности до объекта по тональному эхосигналу, устройства оценки курсового угла на объект по тональному эхосигналу, устройства оценки радиальной скорости объекта по тональному эхосигналу соединены с первыми входами устройства определения дальности до объекта, устройства определения курсового угла на объект, устройства определения радиальной скорости объекта соответственно, первые выходы устройства оценки дальности до объекта по сложному эхосигналу, устройства оценки курсового угла на объект по сложному эхосигналу, устройства оценки радиальной скорости объекта по сложному эхосигналу соединены со вторыми входами устройства определения дальности до объекта, устройства определения курсового угла на объект, устройства определения радиальной скорости объекта соответственно, вторые выходы устройства оценки дальности до объекта по тональному эхосигналу, устройства оценки курсового угла на объект по тональному эхосигналу, устройства оценки радиальной скорости объекта по тональному эхосигналу соединены с первым, вторым и третьим входами устройства идентификации обнаруженных эхосигналов соответственно, вторые выходы устройства оценки дальности до объекта по сложному эхосигналу, устройства оценки курсового угла на объект по сложному эхосигналу, устройства оценки радиальной скорости объекта по сложному эхосигналу соединены с четвертым, пятым и шестым входами устройства идентификации обнаруженных эхосигналов соответственно, а седьмой и восьмой его входы соединены с выходами устройства обнаружения тонального эхосигнала и устройства обнаружения сложного эхосигнала соответственно, первый выход устройства принятия решения об обнаружении объекта соединен с третьими входами устройства определения дальности до объекта, устройства определения курсового угла на объект, устройства определения радиальной скорости объекта, а второй его выход соединен с первым входом устройства отображения информации, выходы устройства определения дальности до объекта, устройства определения курсового угла на объект, устройства определения радиальной скорости объекта соединены со вторым, третьим и четвертым входами устройства отображения информации.
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2007 |
|
RU2346295C1 |
| Устройство для высадки головок на стержнях | 1958 |
|
SU125726A1 |
| Механизированная одностоечная шагающая крепь | 1959 |
|
SU126848A1 |
| Устройство для транспортирования и складирования сыпучих материалов, выгружаемых из вагонов | 1947 |
|
SU75061A1 |
| JP2008232861 A, 02.10.2008 | |||
| US6714481 B1, 30.03.2004 | |||

