Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов и классификации обнаруженных объектов.
Важной является задача классификации обнаруженных гидролокатором объектов. Классификация по типу обнаруженного объекта выполняется, в том числе, и на основе анализа бликовой структуры эхосигнала от этого объекта.
Следует отметить, что для обеспечения большой дальности обнаружения необходимо применение тональных зондирующих сигналов большой длительности, а для классификации обнаруженного объекта по бликовой структуре необходимо обеспечить высокую разрешающую способность по дистанции, что возможно при тональных зондирующих сигналах малой длительности. Таким образом, для тонального зондирующего сигнала имеет место противоречие между требованиями по дальности обнаружения объекта и требованиями по классификации объекта по бликовой структуре сигнала.
Известен активный гидролокатор (патент РФ №2346295), содержащий акустические излучающую и приемную антенны, устройство формирования тонального зондирующего сигнала, генераторное устройство, устройство управления, устройство формирования характеристик направленности, блок измерения времени задержки эхосигнала относительно момента излучения зондирующего сигнала, блок измерения угла прихода эхосигнала в вертикальной плоскости, блок измерения глубины цели.
Однако данный гидролокатор не позволяет производить классификацию обнаруженных объектов.
Известен способ классификации объектов по параметрам бликовой структуры эхосигнала и гидролокатор, реализующий этот способ (патент США №4084148). Гидролокатор содержит генератор, формирующий короткий тональный сигнал, излучатель и приемник звука, также содержит первый преобразователь Фурье, второй преобразователь Фурье, инвертор, умножитель, третий преобразователь Фурье, на выходе которого возникает последовательность импульсов, соответствующая бликовой структуре эхосигнала.
Недостатком этого гидролокатора является то, что при большой длительности тонального зондирующего сигнала, необходимой для обеспечения значительных дальностей обнаружения эхосигналов, отсутствует возможность выявления бликовой структуры принимаемого эхосигнала. Это связано с тем, что при большой длительности тонального зондирующего сигнала гидролокатор имеет высокую разрешающую способность по радиальной скорости, но имеет весьма низкую разрешающую способность по дистанции (по времени).
По количеству общих признаков наиболее близким аналогом предлагаемого изобретения является активный гидролокатор с классификацией объекта, содержащий последовательно соединенные устройство управления, устройство формирования тонального зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, также содержащий последовательно соединенные приемную акустическую антенну, устройство обработки сигналов, устройство обнаружения эхосигнала, второй вход которого соединен со вторым выходом устройства управления, и устройство классификации объекта (Гидроакустические средства связи и наблюдения. В.Б. Митько, А.П. Евтютов, С.Е. Гущин. Л.: Судостроение, 1982. С. 133-141). Устройство классификации объекта реализуется на основе анализа спектральных характеристик эхосигналов, использования частотной зависимости интенсивности эхосигналов в широком диапазоне частот от резонансных свойств обнаруженных объектов, оценки размеров обнаруженных объектов.
Недостатком этого гидролокатора-прототипа является отсутствие возможности оценки параметров бликовой структуры эхосигнала, необходимой для классификации объекта по бликовой структуре эхосигнала. Бликовая структура эхосигнала также является одним из важных классификационных признаков (см. патент США №4084148), использование которого позволяющая повысить вероятность правильной классификации обнаруженных объектов.
Целью изобретения является обеспечение возможности классификации обнаруженных объектов по их бликовой структуре при применении тональных зондирующих сигналов большой длительности, которые обеспечивают реализацию значительных дальностей обнаружения объектов.
Техническим результатом изобретения является возможность определения параметров бликовой структуры эхосигнала для гидролокатора с тональными зондирующими сигналами большой длительности, существенно превышающей временную протяженность бликовой структуры эхосигнала.
Для достижения данного технического результата в активный гидролокатор с классификацией объекта, содержащий последовательно соединенные устройство управления, устройство формирования тонального зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, также содержащий последовательно соединенные приемную акустическую антенну, устройство обработки сигналов, устройство обнаружения эхосигнала, второй вход которого соединен со вторым выходом устройства управления, и устройство классификации объекта, введены новые признаки, а именно: последовательно соединенные сигнальное запоминающее устройство, устройство выделения сигнального отклика тонального сигнала, модулятор, согласованный фильтр и устройство определения параметров бликовой структуры, также введены устройство выработки строба, последовательно соединенные устройство оценки времен прихода элементарных эхосигналов, устройство выбора моментов начала формирования модулирующих функций и устройство формирования модулирующих функций сложного сигнала, при этом вход устройства оценки времен прихода элементарных эхосигналов соединен со вторым выходом устройства выделения сигнального отклика тонального сигнала, а первый и второй выходы устройства формирования модулирующей функции сложного сигнала соединены со вторыми входами модулятора и согласованного фильтра соответственно, вход устройства выработки строба соединен с выходом устройства обнаружения эхосигнала, второй выход устройства обработки сигналов соединен с первым входом сигнального запоминающего устройства, первый, второй и третий выходы устройства выработки строба соединены со вторым входом сигнального запоминающего устройства, вторым входом устройства выделения сигнального отклика тонального сигнала и вторым входом устройства определения параметров бликовой структуры соответственно, а третий выход устройства выделения сигнального отклика тонального сигнала соединен со вторым входом устройства формирования модулирующей функции сложного сигнала.
Указанный технический результат достигается за счет того, что определение параметров бликовой структуры эхосигнала для гидролокатора с тональными зондирующими сигналами большой длительности производится на основе получения бликовой структуры на выходе согласованного фильтра для специально сформированных сложных сигналов. Причем полученные при этом длительности откликов, соответствующих отдельным бликам, существенно меньше (в десятки раз) длительности сигнального отклика тонального сигнала. Таким образом, отдельные блики эхосигнала могут быть разделены по времени. Такой результат получается в связи с тем, что разрешающая способность по времени сформированных сложных сигналов существенно выше, чем разрешающая способность тонального сигнала той же длительности. Таким образом, для гидролокатора с тональными зондирующими сигналами большой длительности, выполняющего обнаружение объекта на больших дистанциях появляется возможность оценки параметров бликовой структуры и, следовательно, классификации объекта по бликовой структуре. Данный технический результат получается при совместной работе вновь введенных блоков, связей между ними и связей этих блоков с другими блоками гидролокатора.
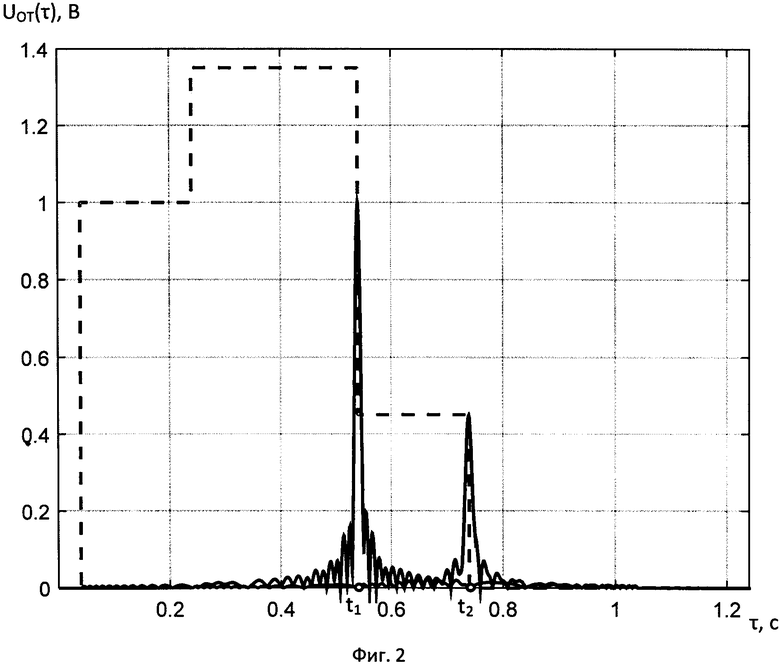
Сущность изобретения поясняется фиг. 1 и фиг. 2, где на фиг. 1 приведена блок-схема предложенного активного гидролокатора, а на фиг. 2 представлены огибающая принятого тонального эхосигнала (штриховая линия) и огибающая отклика специально сформированного сложного сигнала на выходе согласованного фильтра (сплошная линия). По горизонтальной оси на фиг. 2 - время в секундах, по вертикальной оси - уровень сигнала в вольтах.
Активный гидролокатор с классификацией объекта (фиг. 1) содержит последовательно соединенные устройство 3 управления, устройство 4 формирования тонального зондирующего сигнала, генераторное устройство 5 и излучающую акустическую антенну 1. Гидролокатор (фиг. 1) содержит также последовательно соединенные приемную акустическую антенну 2, устройство 6 обработки сигналов и устройство 7 обнаружения эхосигнала, второй вход которого соединен со вторым выходом устройства 3. Также заявленный активный гидролокатор содержит последовательно соединенные сигнальное запоминающее устройство 8, устройство 9 выделения сигнального отклика тонального сигнала, модулятор 10, согласованный фильтр 11, устройство 12 определения параметров бликовой структуры и устройство 13 классификации объекта, также содержит устройство 14 выработки строба, последовательно соединенные устройство 15 оценки времен прихода элементарных эхосигналов, устройство 16 выбора моментов начала формирования модулирующих функций и устройство 17 формирования модулирующей функции сложного сигнала, при этом вход устройства 15 соединен со вторым выходом устройства 9, а первый и второй выходы устройства 17 соединены со вторыми входами модулятора 10 и согласованного фильтра 11 соответственно. Вход устройства 14 соединен с выходом устройства 7, второй выход устройства 6 соединен с первым входом устройства 8, первый, второй и третий выходы устройства 14 соединены со вторым входом устройства 8, вторым входом устройства 9 и вторым входом устройства 12 соответственно, а третий выход устройства 9 соединен со вторым входом устройства 17.
Практическое исполнение блоков, входящих в изобретение, известно из практики гидроакустики и реализуется на основе применения цифровых устройств.
Блок 8 и согласованный фильтр 11 могут быть реализованы на основе технических решений, приведенных в книге Проектирование импульсных и цифровых устройств радиотехнических систем. / Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др.; Под ред. Ю.М. Казаринова. М.: Высш. шк., 1985. на С. 51 и С. 147-150.
Блоки 10, 17 выполняются с использованием технических решений, приведенных в книге Проектирование импульсных и цифровых устройств радиотехнических систем. /Цифровые радионавигационные устройства/ В.В. Барашенков, А.Е. Лутченко, Е.М.Скороходов и др.; под ред. В.Б. Смолова. М.: Сов. радио, 1980. С. 196-206.
Блоки 9, 14 реализуются с использованием технических средств, описанных в книге Проектирование импульсных и цифровых устройств радиотехнических систем. /Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др.; Под ред. Ю.М. Казаринова. М.: Высш. шк., 1985. С. 155-163.
Работа устройства осуществляется следующим образом. Устройство 4 формирования тонального зондирующего сигнала вырабатывает зондирующие сигналы. Гидролокатор производит излучение зондирующего сигнала с помощью генераторного устройства 5 и излучающей акустической антенны 1. Отраженный от объекта эхосигнал с выхода приемной акустической антенны 2 поступает на устройство 6, обеспечивающее обработку принятых сигналов, и далее на устройство 7 обнаружения эхосигнала. С выхода блока 6 сигнальный процесс поступает на вход сигнального запоминающего устройства 8, которое работает в режиме обновления запоминаемой информации. При обнаружении эхосигнала в устройстве 14 вырабатывается стробирующий импульс, середина которого по времени соответствует моменту обнаружения эхосигнала, а длительность которого дает возможность, с учетом приборных ошибок сформировать в блоке 8 необходимый массив сигнального процесса, включающий на некоторой протяженности по времени как отклик тонального сигнала, так и шумы. Этот массив передается в блок 9. В блоке 9 происходит выделение сигнального отклика тонального сигнала из поступившего в блок 9 массива. Из блока 9 сигнальный отклик тонального сигнала в виде радиоимпульса (то есть импульса с высокочастотным заполнением) поступает на вход блока 15, где выполняются приближенные оценки времен прихода элементарных эхосигналов, соответствующих эхосигналам от отдельных «бликов» объекта. Эти приближенные оценки выполняются, например, по моментам времени изменения уровня огибающей принятого сигнала, представляющего собой сумму элементарных тональных эхосигналов (см. фиг. 2). С выхода блока 15 данные о временах прихода элементарных эхосигналов поступают в блок 16, где производится определение моментов начала формирования модулирующих функций сложных сигналов, соответствующих приближенным оценкам времен прихода элементарных сигналов. С выхода блока 16 выбранные моменты формирования модулирующих функций поступают на вход блока 17, в котором выполняется формирование модулирующих функций специального сложного сигнала. С выхода блока 17 сформированные модулирующие функции поступают на входы блока 10 и блока 11. В блоке 10 выполняется модуляция сигнального отклика тонального сигнала, поступившего из блока 9, с помощью передаваемых из блока 17 модулирующих функций с учетом поступивших из блока 16 моментам начала формирования модулирующих функций. На вход блока 11 поступают сформированные с помощью модулятора 10 сложные сигналы, соответствующие временам прихода элементарных эхосигналов. Также из блока 9 в блок 17 поступает управляющий сигнал, задающий начало работы и параметры формирования модулирующих функций сложного сигнала. В результате на выходе блока 11 возникают сжатые по длительности отклики сложных эхосигналов, полученных с помощью модуляции сигнального отклика тонального сигнала и согласованной фильтрации специально сформированного сложного сигнала. Отклики сложного сигнала, полученные на выходе блока 11, соответствуют элементарным эхосигналам, то есть отдельным «бликам» эхосигнала. Таким образом, на выходе блока 11 получается сигнал, соответствующий бликовой структуре эхосигнала. Этот сигнал передается в блок 12. В этом сигнале отклики, соответствующие отдельным бликам разрешены, так как длительность откликов сформированных сложных сигналов существенно меньше сигнального отклика тонального сигнала. Вследствие этого определение параметров бликовой структуры становится возможным при использовании тональных зондирующих сигналов большой длительности. Этот эффект иллюстрируется на примере с помощью фиг. 2.
На фиг. 2 представлено:
- огибающая принятого тонального эхосигнала (штриховая линия), состоящая в данном примере из двух элементарных эхосигналов, соответствующих двум бликам отраженного сигнала. Длительность тонального зондирующего сигнала 0,5 с, элементарные эхосигналы разнесены на 0,2 с;
- огибающие откликов сложных эхосигналов на выходе согласованного фильтра (сплошная линия), соответствующих бликам отраженного сигнала. Ширина полосы сформированных в данном случае сложных сигналов равна 200 Гц, длительности основного лепестка огибающих сигнальных откликов сложных сигналов по уровню (минус 3 дБ) равны соответственно 5 мс.
Таким образом, в данном примере длительность отклика каждого сформированного сложного эхосигнала в 100 раз меньше длительности отклика тонального эхосигнала, за счет этого и происходит существенное повышение разрешающей способности по времени (дистанции), что дает возможность определения параметров бликовой структуры эхосигнала от объекта.
С выхода блока 11 огибающая отклика согласованного фильтра поступает на вход устройства 12 определения параметров бликовой структуры. В блоке 12 производится определение временного положения максимумов откликов, соответствующих отдельным бликам, и определение интервалов времени Δτi между положениями максимумов. Далее в блоке 12 определяются интервалы по дистанции Δdi между отдельными бликами от объекта с использованием соотношения
Δdi=c·Δτi/2,
где с - скорость звука в воде, Δτi - интервалы времени между положениями максимумов откликов на выходе блока 11.
Таким образом, в блоке 12 определены параметры бликовой структуры принятого эхосигнала, которые поступают в блок 13. В блоке 13 принимается решение о классе обнаруженного объекта по оценкам параметров его бликовой структуры (например, путем сравнения с базой данных по бликовым структурам объектов разных классов), а также по виду бликовой структуры, представляемой оператору гидролокатора на индикаторе блока 13. Оператор может принять решение о классе объекта по оценкам параметров бликовой структуры и по виду бликовой структуры эхосигнала на экране.
Устройство 3 управляет во времени формированием зондирующего сигнала (блок 4) и соответственно работой генераторного устройства 5, а также обеспечивает через блок 7 синхронизацию работы блоков 8, 9, 10, 12, 13, 14, 15, 16 и 17.
Использование сигнального запоминающего устройства, устройства выделения сигнального отклика тонального сигнала, устройства оценки времен прихода элементарных эхосигналов, устройства формирования модулирующей функции, модулятора, согласованного фильтра, устройства выработки строба, устройства определения параметров бликовой структуры, с соответствующими связями между этими блоками и связями этих блоков с другими блоками активного гидролокатора, обеспечивает возможность выявления бликовой структуры принимаемого эхосигнала при ольшой длительности тонального зондирующего сигнала на основе определения временного положения максимумов откликов, соответствующих отдельным бликам, определения интервалов времени Δτi между положениями максимумов и интервалов по дистанции Δdi между отдельными бликами от объекта. Возможность определения параметров бликовой структуры и тем самым выполнения классификации обнаруженного объекта в заявленном гидролокаторе связана с тем, что длительность откликов на выходе согласованного фильтра для специально сформированного сложного сигнала существенно меньше длительности сигнального отклика для тонального зондирующего сигнала большой длительности.
Таким образом, задача успешно решается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Активный гидролокатор | 2019 |
|
RU2719214C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2545326C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2019 |
|
RU2736097C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2014 |
|
RU2553730C1 |
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2021 |
|
RU2772110C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2543674C1 |
| ВПЕРЕДСМОТРЯЩИЙ ГИДРОЛОКАТОР С ПОВЫШЕННЫМ РАЗРЕШЕНИЕМ ПО ДАЛЬНОСТИ | 2023 |
|
RU2802295C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2009 |
|
RU2408897C1 |
Использование: изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов и классификации обнаруженных объектов. Сущность: определение параметров бликовой структуры выполняется путем измерения временного положения максимумов откликов, соответствующих отдельным бликам, определения интервалов времени между положениями максимумов и интервалов по дистанции между отдельными бликами от объекта. Возможность определения параметров бликовой структуры и, следовательно, классификации обнаруженных объектов по бликовой структуре в заявленном гидролокаторе связана с тем, что длительность откликов на выходе согласованного фильтра для специально сформированного сложного сигнала существенно меньше длительности сигнального отклика для тонального зондирующего сигнала большой длительности. Технический результат: при большой длительности тонального зондирующего сигнала обеспечивается возможность выявления бликовой структуры принимаемого эхосигнала, которая необходима для выполнения классификации обнаруженного объекта по бликовой структуре. 2 ил.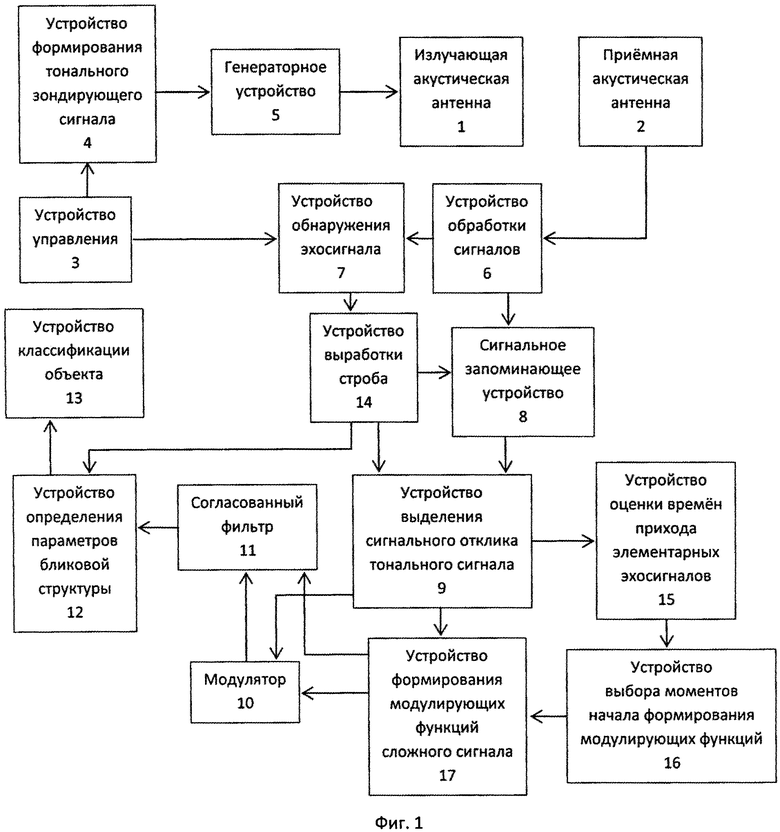
Активный гидролокатор с классификацией объекта, содержащий последовательно соединенные устройство управления, устройство формирования тонального зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, также содержащий последовательно соединенные приемную акустическую антенну, устройство обработки сигналов, устройство обнаружения эхосигнала, второй вход которого соединен со вторым выходом устройства управления, и устройство классификации объекта, отличающийся тем, что в него введены последовательно соединенные сигнальное запоминающее устройство, устройство выделения сигнального отклика тонального сигнала, модулятор, согласованный фильтр и устройство определения параметров бликовой структуры, также введены устройство выработки строба, последовательно соединенные устройство оценки времен прихода элементарных эхосигналов, устройство выбора моментов начала формирования модулирующих функций и устройство формирования модулирующих функций сложного сигнала, при этом вход устройства оценки времен прихода элементарных эхосигналов соединен со вторым выходом устройства выделения сигнального отклика тонального сигнала, а первый и второй выходы устройства формирования модулирующей функции сложного сигнала соединены со вторыми входами модулятора и согласованного фильтра соответственно, вход устройства выработки строба соединен с выходом устройства обнаружения эхосигнала, второй выход устройства обработки сигналов соединен с первым входом сигнального запоминающего устройства, первый, второй и третий выходы устройства выработки строба соединены со вторым входом сигнального запоминающего устройства, вторым входом устройства выделения сигнального отклика тонального сигнала и вторым входом устройства определения параметров бликовой структуры соответственно, а третий выход устройства выделения сигнального отклика тонального сигнала соединен со вторым входом устройства формирования модулирующей функции сложного сигнала.
| АКТИВНЫЙ ГИДРОЛОКАТОР С КЛАССИФИКАЦИЕЙ ОБЪЕКТА | 2013 |
|
RU2528114C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДАЧИ РАССАДЫ К ПОСАДОЧНЫМ МАШИНАМ | 1929 |
|
SU20389A1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2009 |
|
RU2408897C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2528113C1 |
| US4509151 A1, 02.04.1985. | |||

