Область техники, к которой относится изобретение
Настоящее изобретение относится к распознаванию объектов и, в частности, к способу, системе и компьютерному программному продукту для адаптивного распознавания объектов.
Уровень
В настоящее время известно много различных способов и систем адаптивного распознавания объектов.
В патенте РФ №2160467 (публ. 10.12.2000) описаны способ и система адаптивного распознавания, в которых используется эмпирическая база изображений распознаваемых объектов. Распознавание по этому способу может осуществляться практически точно, если эта база достаточно подробна, что может быть достигнуто либо постепенным накоплением реальных результатов, либо обучением в интерактивном режиме с оператором. Однако длительность распознавания по этому способу, осуществляемая путем перебора гипотез, весьма велика.
В статье А.Г.Лучинина и А.И.Хилько «Низкочастотная акустическая томография мелкого моря с использованием маломодовых импульсов» (Акустический журнал, 2005, том 51, №2, с.1-14) описаны система и способ адаптивного распознавания объектов с использованием имитационной модели, которая строится на основе априорных знаний о среде, в которой имеются неоднородности, помехи и шумы. В этом случае в отличие от патента РФ №2160467 распознавание объектов происходит заметно быстрее, а база модельных образов становится непрерывной, но адаптивная настройка производится только по образам, заложенным в имитационную модель.
Таким образом, цель настоящего изобретения состоит в получении таких способа и системы адаптивного распознавания объектов и компьютерного программного продукта, в которых преодолевались бы недостатки указанных известных решений.
Сущность изобретения
Для достижения указанной цели в первом объекте настоящего изобретения обеспечивается способ адаптивного распознавания объектов, заключающийся в том, что формируют эмпирические модели об изображениях возможных распознаваемых объектов на основании априорной информации о параметрах вероятных наблюдаемых объектов; формируют имитационную модель для конкретных условий наблюдения на основании априорной информации о конструкции системы наблюдения и о статистических свойствах среды, в которой находится наблюдаемый объект, с учетом шумов и помех; строят на основе имитационной модели и эмпирических моделей алгоритмы соответственно приближенного и точного распознавания; осуществляют приближенное распознавание наблюдаемого объекта с помощью перебора построенных алгоритмов приближенного распознавания путем проверки гипотез, генерируемых имитационной моделью; осуществляют точное распознавание объекта наблюдения на основе решений, отобранных в процессе приближенного распознавания, путем оценки параметров распознаваемого объекта с помощью построенных алгоритмов точного распознавания.
Для достижения той же цели во втором объекте настоящего изобретения обеспечивается система для адаптивного распознавания объектов, содержащая блок предварительной обработки данных, предназначенный для преобразования поступающих результатов измерений в кодированные сигналы; блок сравнения, предназначенный для сравнения упомянутых кодированных сигналов с сигналами, выработанными на основе гипотез распознавания; первый блок накопления результатов, предназначенный для накопления результатов сравнения в виде набора признаков распознаваемого объекта; блок сопоставления с порогами, предназначенный для сравнения накопленного набора признаков с соответствующими порогами; второй блок накопления результатов, предназначенный для накопления результатов сопоставления с порогами; блок перебора гипотез, предназначенный для выдачи сигналов, выработанных на основе соответствующих гипотез распознавания, блок сравнения и блок сопоставления с порогами; переключатель режимов распознавания, предназначенный для переключения режимов распознавания по имитационной модели и по эмпирической модели; блок формирования имитационной модели, предназначенный для формирования имитационной модели для конкретных условий наблюдения на основании априорной информации о конструкции системы наблюдения и о статистических свойствах среды, в которой находится наблюдаемый объект, с учетом шумов и помех; блок формирования эмпирических моделей, предназначенный для формирования эмпирических моделей об изображениях возможных распознаваемых объектов на основании априорной информации о параметрах вероятных наблюдаемых объектов; блок траектории поиска решения, предназначенный для выбора последовательности поиска решения по распознаванию наблюдаемого объекта с использованием конкретного режима и конкретной гипотезы; блок адаптации, предназначенный для адаптации конкретной гипотезы и выбранной траектории поиска решения; блок управления, предназначенный для выдачи управляющих сигналов на переключение режимов распознавания или адаптацию алгоритма распознавания; интерфейс оператора, предназначенный для обеспечения взаимодействия оператора с системой для адаптивного распознавания объектов; первую, вторую и третью базы данных, предназначенные для хранения данных о состоянии приемных устройств системы для адаптивного распознавания объектов, об условиях регистрации наблюдаемых объектов и об оперативных особенностях динамики изменения характеристик наблюдаемых изображений соответственно.
Для достижения той же цели в третьем объекте настоящего изобретения обеспечивается компьютерный программный продукт для непосредственного использования в компьютере, содержащий программу, которая при ее исполнении в компьютере обеспечивает реализацию способа адаптивного распознавания объектов, заключающегося в том, что формируют эмпирические модели об изображениях возможных распознаваемых объектов на основании априорной информации о параметрах вероятных наблюдаемых объектов; формируют имитационную модель для конкретных условий наблюдения на основании априорной информации о конструкции системы наблюдения и о статистических свойствах среды, в которой находится наблюдаемый объект, с учетом шумов и помех; строят на основе имитационной модели и эмпирических моделей алгоритмы соответственно приближенного и точного распознавания; осуществляют приближенное распознавание наблюдаемого объекта с помощью перебора построенных алгоритмов приближенного распознавания путем проверки гипотез, генерируемых имитационной моделью; осуществляют точное распознавание объекта наблюдения на основе решений, отобранных в процессе приближенного распознавания, путем оценки параметров распознаваемого объекта с помощью построенных алгоритмов точного распознавания.
Краткое описание чертежей
Изобретение далее описывается посредством иллюстративного примера своего осуществления со ссылкой на чертеж, на котором представлена блок-схема системы для адаптивного распознавания объектов согласно настоящему изобретению.
Подробное описание изобретения
Заявленный способ адаптивного распознавания объектов может быть реализован в системе для адаптивного распознавания объектов, с помощью примера осуществления которой иллюстрируются дальше операции способа адаптивного распознавания объектов согласно настоящему изобретению.
Как показано на чертеже, система для адаптивного распознавания объектов по настоящему изобретению предназначена для распознавания объекта наблюдения, информационный образ 1 которого поступает от измерителей (не показано). Система для адаптивного распознавания объектов по настоящему изобретению содержит следующие блоки:
- блок 2 предварительной обработки данных, предназначенный для преобразования поступающих результатов измерений в кодированные сигналы;
- блок 3 сравнения, предназначенный для сравнения упомянутых кодированных сигналов с сигналами, выработанными на основе гипотез распознавания;
- первый блок 4 накопления результатов, предназначенный для накопления результатов сравнения в виде набора признаков распознаваемого объекта;
- блок 5 сопоставления с порогами, предназначенный для сравнения накопленного набора признаков с соответствующими порогами;
- второй блок 6 накопления результатов, предназначенный для накопления результатов сопоставления с порогами;
- блок 7 перебора гипотез, предназначенный для выдачи сигналов, выработанных на основе соответствующих гипотез распознавания, в блок сравнения и блок сопоставления с порогами;
- переключатель 8 режимов распознавания, предназначенный для переключения режимов распознавания по имитационной модели и по эмпирической модели;
- блок 9 формирования имитационной модели, предназначенный для формирования имитационной модели для конкретных условий наблюдения на основании априорной информации о конструкции системы наблюдения и о статистических свойствах среды, в которой находится наблюдаемый объект, с учетом шумов и помех;
- блок 10 формирования эмпирических моделей, предназначенный для формирования эмпирических моделей об изображениях возможных распознаваемых объектов на основании априорной информации о параметрах вероятных наблюдаемых объектов;
- блок 11 траектории поиска решения, предназначенный для выбора последовательности поиска решения по распознаванию наблюдаемого объекта с использованием конкретного режима и конкретной гипотезы;
- блок 12 адаптации, предназначенный для адаптации конкретной гипотезы и выбранной траектории поиска решения;
- блок 13 управления, предназначенный для выдачи управляющих сигналов на переключение режимов распознавания или адаптацию алгоритма распознания;
- интерфейс 14 оператора, предназначенный для обеспечения взаимодействия оператора с системой для адаптивного распознавания объектов;
- первую (15), вторую (16) и третью (17) базы данных, предназначенные для хранения данных о состоянии приемных устройств системы для адаптивного распознавания объектов, об условиях регистрации наблюдаемых объектов и об оперативных особенностях динамики изменения характеристик наблюдаемых изображений соответственно.
Выполнение блоков 2-7 и 10-12 может быть таким же, как в упомянутом патенте РФ №2160467.
Блок 9 в принципе сходен с блоком 10 и представляет собой соответственно запрограммированный процессор с памятью, в котором воплощается имитационная модель, т.е. программа, построенная на основе априорных данных о конструкции системы наблюдения и о статистических свойствах среды, в которой находится наблюдаемый объект, с учетом шумов и помех. Эта программа учитывает неоднородность и нестационарность среды, в которой присутствует наблюдаемый объект.
Блок 13 также представляет собой соответственно запрограммированный процессор с памятью, в которую занесена программа, обеспечивающая выдачу сигналов на переключение переключателя 8, когда приближенное распознавание завершено и надо уточнить его результаты с помощью точного распознавания.
Интерфейс 14 оператора построен таким образом, чтобы обеспечить взаимодействие (интерактивный режим) оператора с блоком 13.
Как отмечено в упомянутом патенте РФ №2160467, отсутствие полных знаний как о среде, в которой находится наблюдаемый объект, так и о самом наблюдаемом объекте приводит к необходимости выдвигать гипотезы о наблюдаемых изображениях объектов, а затем проверять справедливость этих гипотез, т.е. адаптировать алгоритмы обработки получаемых изображений. Здесь под изображением будет пониматься тот образ, который формируется сигналами, отраженными от объекта или излученными объектом, причем не обязательно сигналами видимого диапазона электромагнитных излучений и даже не обязательно электромагнитными сигналами, а, к примеру, (гидро)акустическими. Иными словами, изображение, как оно понимается здесь, может формироваться любыми волновыми сигналами. Это изображение (этот образ) преобразуется в кодовые сигналы, дающие кодовое описание наблюдаемого объекта в среде, которая в общем случае может быть нестационарной и (или) неоднородной. При этом требуется по имеющемуся после обработки кодовому описанию восстанавливать модельное представление о входном изображении и вычислять набор оценок, сопоставляющих результаты различных этапов в процедурах кодирования (обработки) и восстановления. Алгоритмы обработки, которым соответствуют наилучшие оценки при сопоставлении с восстановленными модельными представлениями, т.е. наиболее «правильные» алгоритмы обработки, отбираются для последующего распознавания. «Неправильные» же алгоритмы корректируются либо заменяются новыми по результатам сопоставления.
Способ адаптивного распознавания объектов по настоящему изобретению реализуется в системе для адаптивного распознавания объектов, представленной на чертеже, следующим образом.
Первым из перечисленных выше действий этого способа указано формирование эмпирических моделей об изображениях возможных наблюдаемых объектов на основании априорной информации о параметрах вероятных наблюдаемых объектов. Это формирование эмпирических моделей можно осуществлять заранее, исходя из модельных представлений об устройстве распознаваемого объекта. Однако формировать новые эмпирические модели можно также и в процессе сопоставлений обработанного и восстановленного образов, если оценки этих сопоставлений не отвечают условию распознавания обрабатываемого изображения. Формирование моделей вероятных информационных образов осуществляется, как правило, вне системы по чертежу, хотя может проводиться и, скажем, в блоке 12 адаптации. Для этого в данном блоке 12 можно предусмотреть соответствующий процессор с введенной в него соответствующей программой. Такая программа должна учитывать все взаимосвязи и возможные изменения между структурными элементами модельного описания распознаваемого объекта, и, таким образом, за счет изменения конкретных параметров эта программа позволит учесть большее разнообразие вариантов распознаваемого образа.
По сформированным эмпирическим моделям вероятных информационных образов строят соответствующие алгоритмы точного распознавания вероятных информационных образов. Эта операция, как и предыдущая, может производиться в блоке 12 адаптации теми же методами и средствами, что и предыдущая операция формирования моделей. Два из возможных механизмов построения алгоритмов распознавания вероятных информационных образов описаны, например, в патенте РФ №2090928 (публ. 20.09.1997) и патенте США №4491962 (публ. 01.01.1985). Конкретный вид создаваемых алгоритмов определяется построенными эмпирическими моделями вероятных информационных образов. Построенные алгоритмы точного распознавания могут храниться в соответствующей области собственной памяти блока 12 адаптации или в базе 17 данных моделей объектов наблюдения и их изменений во времени.
В качестве следующего действия предлагаемого в настоящем изобретении способа указано формирование имитационной модели для конкретных условий наблюдения на основании априорной информации о конструкции системы наблюдения и о статистических свойствах среды, в которой находится наблюдаемый объект, с учетом шумов и помех. Это действие может выполняться независимо от формирования эмпирических моделей, после него, перед ним или параллельно с ним. Фактически речь идет о построении физико-математической модели формирования сигналов, помех и шумов в реальной среде (т.е. среде, которая является заведомо нестационарной и (или) неоднородной). Конкретные методы формирования и отладки такой модели приведены, например, в упомянутой выше статье А.Г.Лучинина и А.И.Хилько в Акустическом журнале. Сформированная имитационная модель представляет собой комплекс компьютерных программ, в который входят модели среды, объекта наблюдения, помех и шумов, а также конфигурации системы наблюдения (в которой регистрируется информационный (измеряемый) образ 1 по чертежу). Формирование имитационной модели может, как и для вышеуказанных эмпирических моделей, производиться заранее вне заявляемой системы, но может выполняться и в процессе функционирования заявленной системы, к примеру, в том же блоке 12 адаптации. Отдельные программы комплекса, составляющие имитационную модель, могут храниться как в собственной памяти блока 12 адаптации, так и в базах 15, 16 данных моделей объектов наблюдения, шумов и помех, а также их изменения во времени.
Как и в случае вышеуказанных эмпирических моделей, по сформированной имитационной модели строят алгоритмы приближенного распознавания (например, в соответствии с указаниями в вышеупомянутой статье А.Г.Лучинина и А.И.Хилько в Акустическом журнале). Построенные алгоритмы точного распознавания могут храниться в соответствующей области собственной памяти блока 12 адаптации или в базах 15, 16 данных моделей объектов наблюдения, шумов и помех, а также их изменения во времени.
В качестве следующих действий в заявляемом способе указано осуществление приближенного распознавания наблюдаемого объекта с помощью перебора построенных алгоритмов приближенного распознавания путем проверки гипотез, генерируемых имитационной моделью, и осуществление точного распознавания объекта наблюдения на основе решений, отобранных в процессе приближенного распознавания, путем оценки параметров распознаваемого объекта с помощью построенных алгоритмов точного распознавания. Разница между этими двумя действиями заключается в том, какие именно алгоритмы используются, т.е. на основании какой именно модели - эмпирической или имитационной - эти алгоритмы созданы. В обоих режимах порядок операций одинаков, но в первом режиме, с использованием имитационной модели, осуществляется приближенное (грубое) распознавание на основе непрерывной базы модельных образов (гипотез) путем согласования параметров имитационной модели с текущими, т.е. меняющимися во времени, значениями параметров условий наблюдения. Во втором режиме, который осуществляется аналогично распознаванию, описанному в упомянутом патенте РФ №2160467, осуществляется точное распознавание объекта с использованием дискретной базы модельных образов.
Каждое из упомянутых действий приближенного и точного распознавания осуществляется следующим образом.
Информационный образ 1, представляющий собой поток данных от устройств измерения (не показано), поступает на входы блока 2 предварительной обработки данных. Обработка в блоке 2 может состоять, например, в кодировании и нормировке (кодовые признаки пересчитываются в систему ортогональных признаков), а само кодирование может выполняться в два этапа - грубое и точное.
Операции, выполняемые в блоке 2 предварительной обработки данных, выбираются таким образом, чтобы можно было закодировать все априорно известные, важные детали распознаваемого информационного образа, а также подробности среды распространения и системы наблюдения.
Кодовое описание обработанного в блоке 2 информационного образа поступает в блок 3 сравнения. Конкретные операции, осуществляемые в блоке 3 сравнения, соответствуют операциям, выполняемым в блоках 3-5 упомянутого патента РФ №2160467. Т.е. над полученным набором признаков осуществляется восстановление модельного образа в результате процесса, обратного процессу предварительной обработки. Полученный модельный образ сопоставляется с информационным образом 1 для выявления невязок (различий).
Все полученные в блоке 3 сравнения сигналы запоминаются (накапливаются) в первом блоке 4 накопления результатов и сопоставляются в блоке 5 сопоставления с порогами. Пороги в блоке 5 сопоставления с порогами могут выбираться на этапе формирования соответствующих моделей или на этапе построения соответствующих алгоритмов обработки.
Результаты этого сопоставления запоминаются (накапливаются) во втором блоке 6 накопления результатов и поступают в блок 13 управления. Если заранее заданное число этих оценок, например любые две из трех или конкретно вторая и третья, оказываются ниже соответствующих заранее выбранных порогов в блоке 5, блок 13 принимает решение о распознавании входного информационного образа. Если это происходит на этапе первого режима, блок 13 выдает сигнал на переключатель 8 режимов распознавания и на блоки 9, 10 и 12, по которому производится переключение режимов распознавания с приближенного на точный. Если же это происходит на этапе точного распознавания, блок 13 выдает сигнал на остановку процесса распознавания и индицирует факт распознавания наблюдаемого объекта.
Если же в процессе сравнения в блоке 3 и сопоставления полученных при этом оценок с порогами в блоке 5 окажется, что величины оценок превышают большее количество порогов, чем заранее задано, блок 13 выдает сигнал на блок 12 адаптации. Блок 12 в соответствии с этим сигналом осуществляет адаптацию (коррекцию) алгоритма распознавания - либо уточнением его параметров или последовательности действий, либо заменой алгоритма. Такая адаптация (коррекция) осуществляется аналогично тому, как это делается в блоке 6 в упомянутом патенте РФ №2160467.
Кроме того, когда заданное число оценок превышает соответствующие пороги, блок 13 может выдать сигнал о невозможности распознавания наблюдаемого объекта на данном этапе. Тогда в зависимости от конкретной ситуации система либо принудительно (оператором с помощью интерфейса 14) переводится в режим точного распознавания, либо оператор принимает иное решение (отложить распознавание до накопления большей статистики, отказаться от распознавания вообще и т.п.).
Система для адаптивного распознавания объектов по настоящему изобретению может содержать второй канал распознавания, состоящий из блоков, аналогичных блокам 2-12, и организованный аналогично показанному на чертеже, но с иным назначением - распознавание шумов и помех. Отличие от уже рассмотренного канала обработки при этом состоит в том, что в этом дополнительном канале используются алгоритмы (приближенные и точные) распознавания шумов и помех, а не сигналов. После распознавания шума или помехи данные о них поступают в блок 13 управления, который на основе сведений о распознанных шумах или помехах выдает соответствующие управляющие сигналы на блоки 9-12 аналогично тому, как это делается в блоке 17 в упомянутом патенте РФ №2160467.
В этом случае входной сигнал представляет собой два сигнала, один из которых относится к информационному, а другой - к шумовому, мешающему сигналу. Предполагается, что в системе в базах 15-17 данных уже имеются кодовые описания каждой из представленных компонент сложного входного сигнала, а в блоке 3 каждого канала имеются алгоритмы для кодирования и восстановления этих сигналов. При поступлении входного сигнала в блок 2 каждого канала происходит его предварительная фильтрация и выделение кодового описания соответственно информационного сигнала и шумового сигнала, которые сравниваются в соответствующих блоках 3 с набором имеющихся архивных кодовых данных для информационных сигналов. После уже описанной обработки наиболее близкое кодовое описание информационного сигнала и наиболее близкое кодовое описание шумового сигнала передаются в блок 13 управления, где на их основе формируется специализированная процедура фильтрации информационной компоненты входного сигнала во втором канале для выделения шумовой компоненты и соответствующая процедура фильтрации шумовой компоненты входного сигнала в первом (основном) канале для выделения информационного сигнала. Такая взаимосвязанная корректировка алгоритмов распознавания сигнала и шума (или помехи) продолжается до тех пор, пока в блоке 13 не будут приняты соответствующие решения о достоверном выделении шумового и информационного сигналов. Отметим, что выделенные информационный и шумовой сигналы могут использоваться в дальнейшем для корректировки сформированных до этого моделей соответственно информационного и шумового сигналов.
Если же в процессе распознавания окажется, что получаемые оценки превышают заданные пороги для принятия положительного решения, блок 13 выдает сигнал для адаптации алгоритма распознавания - либо уточнением параметров или последовательностей действий, либо заменой алгоритма. По этому управляющему сигналу меняются наборы программ, в соответствии с которыми производится распознавание.
Вообще говоря, работа с отдельным режимом распознавания шума и (или) помех может осуществляться и в устройстве по фиг.1, если предусмотреть возможность использовать переключатель 8 режимов распознавания для переключения и в этот режим. Такое переключение может происходить как по команде оператора с помощью интерфейса 14, так и автоматически по сигналу с блока 13 управления. При этом происходит также перенастройка в блоках 2-7 и 9-12 на работу не по полезному сигналу, а по шуму и (или) помехе. Полученные в этом режиме пороги выставляются затем для более точного распознавания наблюдаемых объектов в режиме как приближенного, так и точного распознавания.
Предлагаемый способ может быть реализован как аппаратными средствами с помощью системы по фиг.1, так и в программном виде. При этом соответствующая программа на любом подходящем языке программирования заносится на машиночитаемый носитель (компьютерный программный продукт), предназначенный для непосредственно участия в работе компьютера и обеспечивает выполнение с его помощью операций описанного выше способа.
Настоящее изобретение обеспечивает ускорение распознавания и расширение классов распознавания наблюдаемых объектов за счет использования непрерывной имитационной модели на первом этапе, позволяя подбирать наиболее эффективные алгоритмы распознавания, учитывающие неоднородность и (или) нестационарность среды распространения измерительных сигналов.
Хотя данное изобретение описано примерами его реализации, это описание не является ограничивающим, но приведено лишь для иллюстрации и лучшего понимания существа изобретения, объем которого определяется прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОТЕХНИЧЕСКОГО РАСПОЗНАВАНИЯ ИЗЛУЧАЮЩИХ ОБЪЕКТОВ В ВОЗДУШНО-КОСМИЧЕСКОМ ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2016 |
|
RU2641482C2 |
| СПОСОБ АДАПТИВНОГО РАСПОЗНАВАНИЯ ИНФОРМАЦИОННЫХ ОБРАЗОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2160467C1 |
| НЕЙРОСЕТЕВАЯ АДАПТИВНАЯ СИСТЕМА РАСПОЗНАВАНИЯ ОБЪЕКТОВ ПО ИХ АКУСТИЧЕСКИМ ИЗЛУЧЕНИЯМ | 2013 |
|
RU2513719C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2018 |
|
RU2705770C1 |
| Адаптивная антенная решетка | 1983 |
|
SU1113865A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ И СКОРОСТЕЙ ОБЪЕКТОВ НА ОСНОВЕ СТЕРЕОПОДХОДА | 2012 |
|
RU2582853C2 |
| Способ распознавания типа воздушного объекта по турбинному эффекту | 2022 |
|
RU2790143C1 |
| Способ адаптивной фильтрации | 2022 |
|
RU2783038C1 |
| Способ адаптивной фильтрации | 2021 |
|
RU2755499C1 |
| СПОСОБ И УСТРОЙСТВО АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ ФИЛЬТРАЦИИ СИГНАЛОВ | 1998 |
|
RU2141706C1 |
Изобретение относится к распознаванию объектов. Техническим результатом является ускорение распознавания и расширение классов распознавания наблюдаемых объектов. Способ адаптивного распознавания объектов заключается в том, что формируют эмпирические модели об изображениях возможных распознаваемых объектов на основании априорной информации о параметрах вероятных наблюдаемых объектов; формируют имитационную модель для конкретных условий наблюдения на основании априорной информации о конструкции системы наблюдения и о статистических свойствах среды, в которой находится наблюдаемый объект, с учетом шумов и помех; строят на основе имитационной модели и эмпирических моделей алгоритмы соответственно приближенного и точного распознавания; осуществляют приближенное распознавание наблюдаемого объекта с помощью перебора построенных алгоритмов приближенного распознавания путем проверки гипотез, генерируемых имитационной моделью; осуществляют точное распознавание объекта наблюдения на основе решений, отобранных в процессе приближенного распознавания, путем оценки параметров распознаваемого объекта с помощью построенных алгоритмов точного распознавания. Способ можно реализовать как аппаратно в соответствующей системе, так и программно в виде соответствующего компьютерного программного продукта. 2 н.п. ф-лы, 1 ил.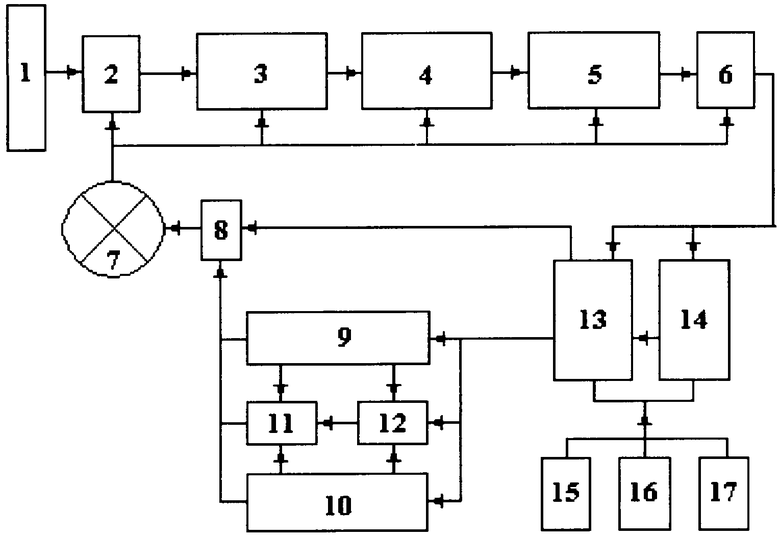
1. Способ адаптивного распознавания объектов, заключающийся в том, что:
формируют эмпирические модели об изображениях возможных распознаваемых объектов на основании априорной информации о параметрах вероятных наблюдаемых объектов;
формируют имитационную модель для конкретных условий наблюдения на основании априорной информации о конструкции системы наблюдения и о статистических свойствах среды, в которой находится наблюдаемый объект, с учетом шумов и помех;
строят на основе имитационной модели и эмпирических моделей алгоритмы, соответственно, приближенного и точного распознавания;
осуществляют приближенное распознавание наблюдаемого объекта с помощью перебора построенных алгоритмов приближенного распознавания путем проверки гипотез, генерируемых имитационной моделью;
осуществляют точное распознавание объекта наблюдения на основе решений, отобранных в процессе приближенного распознавания, путем оценки параметров распознаваемого объекта с помощью построенных алгоритмов точного распознавания.
2. Система для адаптивного распознавания объектов, содержащая:
блок предварительной обработки данных, предназначенный для преобразования поступающих результатов измерений в кодированные сигналы;
блок сравнения, предназначенный для сравнения упомянутых кодированных сигналов с сигналами, выработанными на основе гипотез распознавания;
первый блок накопления результатов, предназначенный для накопления результатов сравнения в виде набора признаков распознаваемого объекта;
блок сопоставления с порогами, предназначенный для сравнения накопленного набора признаков с соответствующими порогами;
второй блок накопления результатов, предназначенный для накопления результатов сопоставления с порогами;
блок перебора гипотез, предназначенный для выдачи сигналов, выработанных на основе соответствующих гипотез распознавания, в блок сравнения и блок сопоставления с порогами;
переключатель режимов распознавания, предназначенный для переключения режимов распознавания по имитационной модели и по эмпирической модели;
блок формирования имитационной модели, предназначенный для формирования имитационной модели для конкретных условий наблюдения на основании априорной информации о конструкции системы наблюдения и о статистических свойствах среды, в которой находится наблюдаемый объект, с учетом шумов и помех;
блок формирования эмпирических моделей, предназначенный для формирования эмпирических моделей об изображениях возможных распознаваемых объектов на основании априорной информации о параметрах вероятных наблюдаемых объектов;
блок траектории поиска решения, предназначенный для выбора последовательности поиска решения по распознаванию наблюдаемого объекта с использованием конкретного режима и конкретной гипотезы;
блок адаптации, предназначенный для адаптации конкретной гипотезы и выбранной траектории поиска решения;
блок управления, предназначенный для выдачи управляющих сигналов на переключение режимов распознавания или адаптацию алгоритма распознания;
интерфейс оператора, предназначенный для обеспечения взаимодействия оператора с системой для адаптивного распознавания объектов;
первая, вторая и третья базы данных, предназначенные для хранения данных о состоянии приемных устройств системы для адаптивного распознавания объектов, об условиях регистрации наблюдаемых объектов и об оперативных особенностях динамики изменения характеристик наблюдаемых изображений, соответственно.
| СПОСОБ АДАПТИВНОГО РАСПОЗНАВАНИЯ ИНФОРМАЦИОННЫХ ОБРАЗОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2160467C1 |
| СПОСОБ АНАЛИЗА СИГНАЛОВ О СОСТОЯНИИ ОБЪЕКТА | 1992 |
|
RU2090928C1 |
| US4491962, 01.01.1985 | |||
| US 6751353 В1, 15.06.2004 | |||
| US 6243501 В1, 05.06.2001 | |||
| ЛУЧИНИН А.Г | |||
| и др | |||
| Низкочастотная акустическая томография мелкого моря с использованием маломодовых импульсов | |||
| - Акустический журнал, 2005, т.51, №2, с.1-14. | |||

