Изобретение относится к области радиотехники и рекомендуется к использованию при распознавании исследуемых излучающих объектов в воздушно-космическом пространстве с помощью комплексов радиотехнических измерений (КРТИ).
Известна система с реализованным в ней способом адаптивного распознавания объектов [1], предназначенная для распознавания объектов наблюдения, информационные образы 1 которых поступают от измерителей (не показано), содержащая последовательно соединенные блок предварительной обработки данных 2, предназначенный для преобразования поступающих результатов измерений в кодированные сигналы, блок сравнения 3, предназначенный для сравнения упомянутых кодированных сигналов с сигналами, выработанными на основе гипотез распознавания, первый блок накопления результатов 4, предназначенный для накопления результатов сравнения в виде набора признаков распознаваемого объекта, блок сопоставления с порогами 5, предназначенный для сравнения накопленного набора признаков с соответствующими порогами, второй блок накопления результатов 6, предназначенный для накопления результатов сопоставления с порогами, на вторые входы которых подается сигнал с выхода блока перебора гипотез 7, предназначенного для выдачи сигналов, выработанных на основе соответствующих гипотез распознавания, причем выход блока 6 соединен с первым входом блока управления 13, предназначенного для выдачи управляющих сигналов на переключение режимов распознавания или адаптацию алгоритма распознания и первым входом интерфейса оператора 14, предназначенного для обеспечения взаимодействия оператора с системой для адаптивного распознавания объектов, выход которого соединен со вторым входом блока 13, информация с выходов первой (15), второй (16) и третьей (17) баз данных, предназначенных для хранения данных о состоянии приемных устройств системы для адаптивного распознавания объектов, об условиях регистрации наблюдаемых объектов и об оперативных особенностях динамики изменения характеристик наблюдаемых изображений поступает на второй вход блока 14 и третий вход блока 13, первый выход которого соединен с входом блока формирования имитационной модели 9, предназначенного для формирования имитационной модели для конкретных условий наблюдения на основании априорной информации о конструкции системы наблюдения и о статистических свойствах среды, в которой находится наблюдаемый объект, с учетом шумов и помех и входом блока формирования эмпирических моделей 10, предназначенного для формирования эмпирических моделей об изображениях возможных распознаваемых объектов на основании априорной информации о параметрах вероятных наблюдаемых объектов и вторым входом блока адаптации 12, предназначенного для адаптации конкретной гипотезы и выбранной траектории поиска решения, причем на первый и третий входы блока 12 поступает информация со второго и третьего выходов блоков 9 и 10 соответственно, выход блока 12 присоединен ко второму входу блока траектории поиска решения 11, предназначенного для выбора последовательности поиска решения по распознаванию наблюдаемого объекта с использованием конкретного режима и конкретной гипотезы, на первый и третий входы которого поступает информация с третьего выхода блока 9 и второго выхода блока 10 соответственно, первые выходы блока 9, блока 10 и блока 11 соединены со вторым входом переключателя режимов распознавания 8, предназначенного для переключения режимов распознавания по имитационной модели и по эмпирической модели, первый вход которого соединен со вторым выходом блока 13, а выход блока 8 соединен со входом блока 7.
Недостатком известной системы является относительно низкая достоверность распознавания объектов, поскольку способ, реализованный в указанном устройстве не обеспечивает выполнения ряда процедур, таких как:
а) проведение предварительной оценки координатной и некоординатной информации с целью определения приоритетности классов распознавания;
б) расчет информативности признаков распознавания для определения их весовых коэффициентов (определения значимости, степени вносимого вклада в процесс распознавания);
в) учет информативности признаков при определении траектории поиска решения;
г) использования математического аппарата распознавания применительно к решению распознавания конкретных признаков, исходя из их особенностей;
д) решения задачи распознавания по совокупности признаков.
Заявляемое изобретение направлено на решение задачи повышения вероятности правильного распознавания излучающих объектов в воздушно-космическом пространстве за счет определения приоритетности распознавания классов на основании предварительной оценки информации; определения алгоритмов распознавания излучающих объектов (ИО), адаптированных под конкретный признак; определения информативности признаков распознавания и назначения весовых коэффициентов; учета информативности признаков при определении траектории принятия решения; проведения распознавания по совокупности признаков.
Цель данного изобретения состоит в получении таких способа и устройства радиотехнического распознавания излучаемых объектов в воздушно-космическом пространстве, в которых недостатки, указанные выше, были бы устранены.
Для достижения указанной цели в первом объекте изобретения обеспечивается способ радиотехнического распознавания исследуемых излучаемых объектов в воздушно-космическом пространстве, заключающийся в том, что формируют эмпирические модели об исследуемых излучающих объектах на основе априорных данных или по результатам предшествующих измерений; формируют имитационную модель для конкретных условий наблюдений на основании априорной информации о конструкции системы наблюдения и о статистических свойствах среды, в которой находится наблюдаемый объект с учетом шумов и помех; эмпирические и имитационные модели являются источником исходных данных для проведения дальнейшего распознавания; предварительная оценка имеет целью формирование приоритета распознавания классов; оценивание информативности необходимо для назначения весовых коэффициентов и определения траектории поиска решения при распознавании класса по признакам; используются алгоритмы распознавания излучающих объектов, адаптированных под конкретный признак; заключительное решение о принадлежности ИО к определенному классу принимается на основании совокупности частных решений о распознавании и соответствующих весовых коэффициентов.
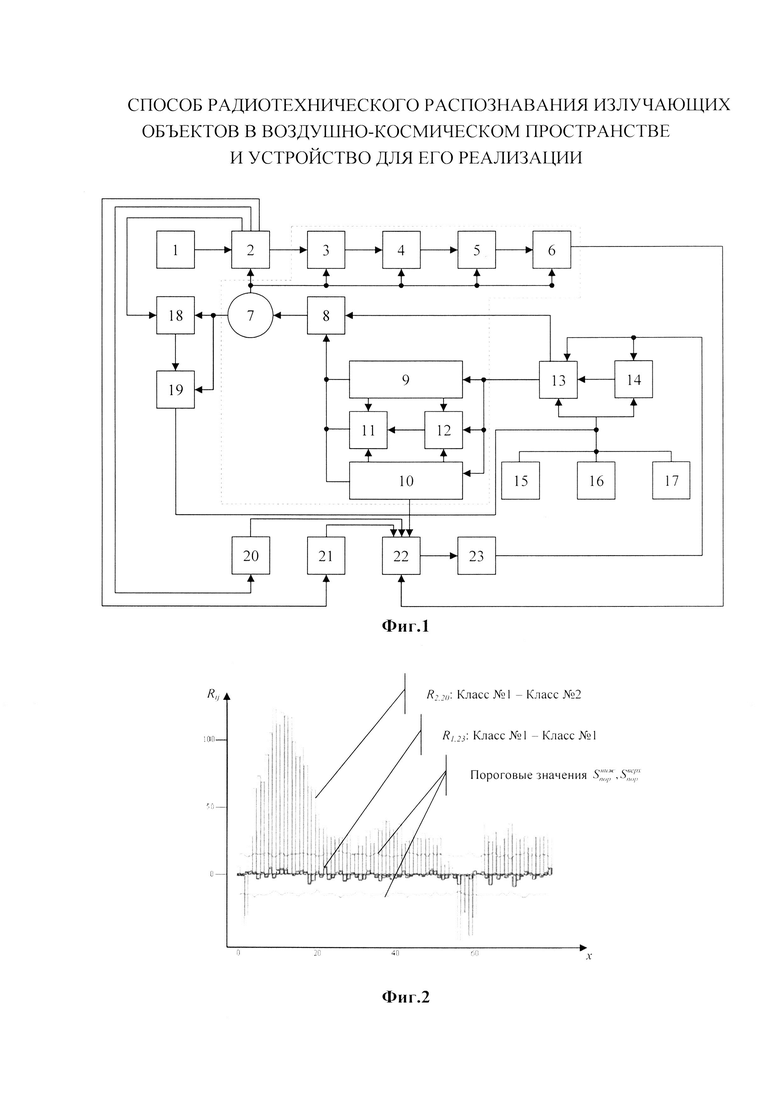
Решение поставленной задачи во втором объекте достигается тем, что в системе радиотехнического распознавания излучающих объектов в воздушно-космическом пространстве (СРТРИО ВКП), содержащей последовательно соединенные блок предварительной обработки данных 2, блок сравнения 3, первый блок накопления результатов сравнения в виде набора признаков распознаваемого объекта 4, блок сопоставления с порогами 5, второй блок накопления результатов сопоставления с порогами 6, на вторые входы которых подается сигнал со второго выхода блока перебора гипотез 7, информация с выходов первой (15), второй (16) и третьей (17) баз данных соответственно поступает на третий вход блока управления режимами распознавания 13 и второй вход блока интерфейса оператора 14, выход которого соединен со вторым входом блока 13, второй выход которого соединен с первым входом блока переключателя режимов распознавания 8, а первый выход блока 13 соединен с входом блока формирования имитационной модели 9, вторым входом блока адаптации конкретной гипотезы 12 и входом блока формирования эмпирических моделей 10 соответственно, первый вход блока 12 соединен со вторым выходом блока 9, третий вход блока 12 соединен с третьим выходом блока 10, в свою очередь выход блока 12 соединен со вторым входом блока траектории поиска решения 11, первый вход которого соединен с третьим выходом блока 9, третий вход блока 11 соединен со вторым выходом блока 10, сигналы с выходов блоков 9, 10 и 11 поступают на второй вход блока 8, выход которого соединен с входом блока 7, дополнительно в СРТРИО ВКП введены блок оценки координатной и некоординатной информации 18, первый вход которого соединен с первым выходом блока 2, второй вход соединен с первым выходом блока 7, а выход подключен к первому входу третьего блока накопления результатов предварительной оценки 19, второй вход которого соединен с первым выходом блока 7, а выход соединен с третьим и вторым входами блоков 13 и 14 соответственно, блоки 20 и 21 представляют собой второй и третий каналы обработки радиотехнической информации (РТИ), входы которых соединены со вторым и третьим выходами блока 2; блок оценки информативности 22, на четвертый, второй и первый входы которого поступает информация с выхода блока 6 (первого канала) и выходов блоков 20 и 21 соответственно, а четвертый выход блока 10 соединен с третьим входом блока 22, выход которого в свою очередь соединен с входом блока распознавания по совокупности признаков 23, выход которого соединен с первыми входами блоков 13 и 14.
На фиг. 1 изображена структурная схема заявляемого объекта.
СРТРИО ВКП содержит (см. фиг. 1):
1 - блок информационного образа;
2 - блок предварительной обработки данных, предназначенный для преобразования поступающих результатов измерений в кодированные сигналы;
3 - блок сравнения, предназначенный для сравнения упомянутых кодированных сигналов с сигналами, выработанными на основе гипотез распознавания;
4 - первый блок накопления результатов, предназначенный для накопления результатов сравнения в виде набора признаков распознаваемого объекта;
5 - блок сопоставления с порогами, предназначенный для сравнения накопленного набора признаков с соответствующими порогами;
6 - второй блок накопления результатов, предназначенный для накопления результатов сопоставления с порогами;
7 - блок перебора гипотез, предназначенный для выдачи сигналов, выработанных на основе соответствующих гипотез распознавания, в блок сравнения и блок сопоставления с порогами;
8 - переключатель режимов распознавания, предназначенный для переключения режимов распознавания по имитационной модели и по эмпирической модели;
9 - блок формирования имитационной модели, предназначенный для формирования имитационной модели для конкретных условий наблюдения на основании априорной информации о конструкции системы наблюдения и о статистических свойствах среды, в которой находится наблюдаемый объект, с учетом шумов и помех;
10 - блок формирования эмпирических моделей, предназначенный для формирования эмпирических моделей об изображениях возможных распознаваемых объектов на основании априорной информации о параметрах вероятных наблюдаемых объектов;
11 - блок траектории поиска решения, предназначенный для выбора последовательности поиска решения по распознаванию наблюдаемого объекта с использованием конкретного режима и конкретной гипотезы;
12 - блок адаптации, предназначенный для адаптации конкретной гипотезы и выбранной траектории поиска решения;
13 - блок управления, предназначенный для выдачи управляющих сигналов на переключение режимов распознавания или адаптацию алгоритма распознания;
14 - интерфейс оператора, предназначенный для обеспечения взаимодействия оператора с системой для адаптивного распознавания объектов;
15, 16 и 17 - первая, вторая и третья базы данных соответственно, предназначенные для хранения данных о состоянии приемных устройств системы для адаптивного распознавания объектов, об условиях регистрации наблюдаемых объектов и об оперативных особенностях динамики изменения характеристик наблюдаемых изображений соответственно;
18 - блок оценки координатной и некоординатной информации, для подготовки исходных данных, необходимых для определения приоритета распознавания;
19 - третий блок накопления результатов предварительной оценки, предназначенный для накопления результатов сравнения в виде соответствующей последовательности;
20 - второй канал обработки РТИ;
21 - третий канал обработки РТИ;
22 - блок оценки информативности признаков распознавания, предназначенный для определения информативности признаков распознавания и назначения соответствующих весовых коэффициентов;
23 - блок распознавания по совокупности признаков, предназначенный для принятия решения о принадлежности ИО к тому или иному классу на основании совокупности признаков.
Система работает следующим образом (см. фиг. 1).
Одной из задач существующих комплексов радиотехнических измерений является распознавание типа ИО. Измеренная информация об ИО преобразуется в признаки, на основании которых принимается решение о принадлежности к тому или иному классу. Примеры различных систем распознавания приведены в книгах [2-3].
Предлагаемая СРТРИО ВКП по настоящему изобретению может содержать N каналов распознавания, состоящих из блоков, аналогичных блокам 3-12 и 15-17, и организованных аналогично показанному на фиг. 1. Количество каналов зависит от возможностей существующих средств измерений и научно-методического аппарата обработки информации с целью получения признаков. В работах [4-5] предлагается использовать спектральный портрет, диаграмму направленности и ряд простых признаков для решения задачи распознавания.
КРТИ обеспечивает заявленную систему - СРТРИО ВКП необходимым набором радиотехнических измерений, полученных в ходе сеанса работ. Они составляют основу радиотехнического информационного образа (РИО), который наряду с целеуказаниями от обеспечивающей системы составляет набор исходных данных для работы СРТРИО ВКП. Целеуказания содержат вектор координат точки входа ИО в зону действия комплекса радиотехнических измерений (КРТИ).
РИО поступает в блок предварительной обработки данных 2, где производится преобразование и нормирование измеренной информации на основании данных, которые поступают на второй вход данного блока, в соответствии с требованиями, предъявляемыми к каталогизированным значениям, хранящимся в базах данных (15-17).

где  - измеренная информация, отвечающая требованиям, предъявляемым к каталогизированным значениям;
- измеренная информация, отвечающая требованиям, предъявляемым к каталогизированным значениям;
 - измеренная информация, поступившая на блок предварительной обработки;
- измеренная информация, поступившая на блок предварительной обработки;
K - коэффициент, который приводит в соответствие каталогизированным данным измеренные значения в зависимости от условий проведения измерений;
j - номер дискреты;
М - количество дискрет, с помощью которых описывается сигнал  .
.
С первого выхода блока предварительной обработки данных массив измеренной информации поступает на первый вход блока оценки координатной и некоординатной информации (КИ и НКИ) 18. Сравнение производится на основании данных, поступающих из баз данных посредством блока формирования гипотез 7.
Набор радиотехнических измерений формально можно разделить на три группы «А», «Б» и «В». Каждая из них может состоять из совокупности параметров. Например, группа траекторных параметров «А» может состоять из величин азимута и угла места точки входа в зону обзора и выхода из нее, величин радиальных скоростей и так далее. Группа спектральной информации «Б» - из ширины спектра, величины максимума излучения, количества пиков, количества и величин несущих частот и так далее. В свою очередь информация об изменении амплитуды сигнала во времени «В» включает значения: максимума амплитуды, ширины главного лепестка диаграммы направленности, количество боковых лепестков и их уровня.
Рассмотрим работу блока оценки КИ и НКИ 18 на следующем примере. Пусть в наборе радиотехнических измерений находится по одному параметру, одним из которых является несущая частота  группы «Б». Разобьем весь спектральный диапазон на интервалы, присвоим каждому из них свой порядковый номер и введем дискретный параметр а. Данный параметр будет принимать значение 1, если
группы «Б». Разобьем весь спектральный диапазон на интервалы, присвоим каждому из них свой порядковый номер и введем дискретный параметр а. Данный параметр будет принимать значение 1, если  , и 0 - в ином случае. Количество элементов последовательности i зависит от дискретности
, и 0 - в ином случае. Количество элементов последовательности i зависит от дискретности  и возможностей КРТИ по получению информации. Величину
и возможностей КРТИ по получению информации. Величину  предлагается выбирать руководствуясь критерием минимума среднего риска. Допустим в нашем случае i=8 и несущая частота принадлежит 4-му интервалу. В таком случае последовательность примет вид: 00010000. Данная последовательность говорит о том, что в существующем наборе присутствует одна несущая частота, которая принадлежит четвертому интервалу. Данная формальная запись удобна для дальнейшей записи, хранения и отождествления в блоке управления 13. На второй вход которого она поступает с блока хранения 19, как только заполнятся все элементы последовательностей, с помощью которых описываются измеренные параметры.
предлагается выбирать руководствуясь критерием минимума среднего риска. Допустим в нашем случае i=8 и несущая частота принадлежит 4-му интервалу. В таком случае последовательность примет вид: 00010000. Данная последовательность говорит о том, что в существующем наборе присутствует одна несущая частота, которая принадлежит четвертому интервалу. Данная формальная запись удобна для дальнейшей записи, хранения и отождествления в блоке управления 13. На второй вход которого она поступает с блока хранения 19, как только заполнятся все элементы последовательностей, с помощью которых описываются измеренные параметры.
В блоке управления 13 каждой последовательности ставится в соответствие идентичная последовательность, хранящаяся в базе данных и характерная для одного или нескольких классов ИО. В случае соответствия последовательностей, принадлежащих измеренным параметрам и находящимся в базах данных каталога, формируется код высокого уровня, определяющий значение логической «1» и логического «0» в обратном случае. Сумма последних для каждой последовательности указывает на количество классов, предполагаемых для распознавания и, следовательно, может являться мерой приоритета их распознавания.
Например, последовательность 00010000 характерна для 7-ми классов ИИО, а вторая и третья (полученные идентичным путем для параметров из групп «А» и «В») - для 5-ти и 4-х классов ИО соответственно. Ввиду того, что мы ограничились по одному параметру в каждой группе, максимальная сумма кода высокого уровня - ni, где i=1, 2, 3, определяющих дискретный параметр  будет равна 3. Классы выстраиваются в соответствии с их дискретным параметром N, то есть чем больше данное значение, тем выше приоритет. В рассматриваемом случае максимальное число классов с наивысшим приоритетом могло быть равно 4, так как минимальное число классов соответствует группе параметров «В» и равно 4. В этом случае они выстраиваются в порядке увеличения порядкового номера.
будет равна 3. Классы выстраиваются в соответствии с их дискретным параметром N, то есть чем больше данное значение, тем выше приоритет. В рассматриваемом случае максимальное число классов с наивысшим приоритетом могло быть равно 4, так как минимальное число классов соответствует группе параметров «В» и равно 4. В этом случае они выстраиваются в порядке увеличения порядкового номера.
По требованию оператора (блок 14) приоритетность проведения распознавания N может быть изменена или скорректирована. Указанные мероприятия еще не являются распознаванием в общем смысле слова, они направлены на уменьшение времени и минимизацию вычислительных затрат при проведении дальнейшего распознавания.
В целом выполнение блоков 11-17 не отличается от прототипа.
При распознавании ИО, эталонный сигнал которого занесен в каталог, в блоках 11 и 12 по управляющим сигналам из блока управления 13 организуется процесс распознавания и формируется очередь распознавания, аналогично процедуре, изложенной в прототипе [1]. Под траекторией поиска решения будем понимать организацию очереди распознавания признаков. Анализ книг [3] показал, что при правильном описании классов можно выделить группы признаков, которые обладают наилучшими разделяющими свойствами. Определение таких признаков позволит провести распознавание досрочно и минимизировать вычислительные затраты. Дальнейшие вычисления могут быть продолжены по требованию оператора для повышения достоверности посредством блока управления 13 и интерфейса 14.
Управляющие сигналы с блока 13, пороговые значения с блока 10, очередность распознавания с блока 13 и каталогизированные значения с блока 10 поступают через переключатель 8 на вход блока формирования гипотез 7. Работа данных блоков идентична прототипу. Переключатель имеет, как указано в прототипе, два режима: подключение эмпирической модели (ЭМ) и подключение имитационной модели (ИМ). Последняя модель применяется, если априорно известно, что ИО является новым, или в случае если исследуемую зависимость нельзя полностью описать с помощью эмпирической модели. Последний факт характерен для случая, когда измеряемые зависимости, полученные от ИО, не группируются вокруг одного эталонного значения и необходимо проводить моделирование, исходя из априорных данных для конкретной ситуации наблюдения. Кроме того, имитационная модель может быть полезна для первоначального определения весовых коэффициентов. Пополнение каталога (эмпирической модели) производится для того, чтобы с помощью существующих алгоритмов описать ИО на языке признаков и отнести его к определенному классу. Для этого ИМ генерирует различные сигналы. ЭМ пополняется в случае, если зависимость, измеренная от ИО, будет тождественна зависимости, полученной с помощью ИМ, а принадлежность исследуемого объекта подтверждается от взаимодействующих источников.
Схема организации взаимодействия блоков 3-6 аналогична прототипу. Однако процесс организации вычислений предлагается реализовать следующим образом.
Со второго выхода блока 7 сигнал управления, позволяющий передать измеренную информацию на первый вход блока 3, поступает на второй вход блока 2. На второй вход блока 3 со второго выхода блока 7 поступает эталонный сигнал, хранящийся в каталоге (блок 10). Сравнение указанных сигналов, поступивших на блок 3, осуществляется за счет вычисления разностного портрета [5], под которым будем понимать (фиг. 2):

где N - количество классов.
Здесь i применительно к Rij будет показывать номер эталонного сигнала, с которым проводилось отождествление, по j-му номеру измерения.
Каждый отсчет разностного портрета поступает на первый вход блока накопления 4. Откуда после подачи управляющего сигнала, приходящего на второй вход блока 4, поступает для сопоставления с пороговыми значениями на первый вход блока 5, предназначенного для сравнения накопленных результатов с порогами, поступающими на второй вход блока 5. Расчет пороговых значений производится в блоке 13 для соответствующей гипотезы на основании данных блоков 9 и 10.
Принятие решения о проверке двух гипотез: H0 - гипотеза о том, что полученный сигнал принадлежит к классу №1; H1 - гипотеза о том, что полученный сигнал не принадлежит к классу №1. В качестве решающего правила может быть использовано количество попаданий в заданный интервал:
Правило принятия решения относительно истинности той или иной гипотезы формулируется следующим образом:
- если значение удовлетворяет условию αрасп≥αпор, то справедлива гипотеза H0;
- если значение признака удовлетворяет условию αрасп<αпор, то справедлива гипотеза H1.
При этом соответствующие значения рассчитываются следующим образом:  ,
,  .
.
Значение Kпор определяется исходя из того, что системы распознавания являются системами многократного действия, а значит, это значение должно быть выбрано с учетом того, что средний риск минимален и представляет собой сумму потерь, связанных с неправильными и правильными решениями, с учетом вероятностей их появления и априорных вероятностей поступления на вход системы распознавания исследуемых зависимостей.
Аналогичного результата можно достигнуть проверив нулевую гипотезу, состоящую в том, что параметры отождествляемых сигналов идентичны при заданном уровне значимости а. Предполагается, что математические ожидания рассматриваемых совокупностей равны между собой, т.е.

Если окажется, что нулевая гипотеза справедлива, т.е. математические ожидания одинаковы, то различие незначимо и объясняется случайными причинами и, в частности, влиянием шума, на процесс измерений.
Если нулевая гипотеза отвергнута, то различие математических ожиданий значимо и не может быть объяснено влиянием шума, а объясняется тем, что параметры исследуемого сигнала различны. Например, если математическое ожидание M(R1,j(х)) разностного портрета R1,j(х) значимо отличается от математического ожидания M(R2,j(х)) портрета R2,j(х), то это означает, что параметры отождествляемых сигналов различны.
В качестве критерия проверки нулевой гипотезы воспользуемся случайной величиной

Эта величина случайная, потому что в различных сеансах измерений R1,j(х) и R2,j(х) принимают различные, наперед неизвестные значения.
Критерий Z - нормированная нормальная случайная величина, которая симметрично распределена относительно нуля.
По таблице функций Лапласа найдем значение критической точки в соответствии с формулой  .
.
Если  - нет оснований отвергнуть нулевую гипотезу.
- нет оснований отвергнуть нулевую гипотезу.
Если  - нулевую гипотезу отвергают.
- нулевую гипотезу отвергают.
В этом случае оператору предоставляется возможность выбирать уровень значимости и тем самым варьировать значения порога на блоке сопоставления с порогами (блок 5) посредством управляющих сигналов с блока 13 и интерфейса 14, проходящих через блоки 7 и 8. Данный способ уместно использовать в том случае, когда нельзя описать ИО с помощью эталонных значений, хранимых в каталоге [5]. В этом случае ИМ моделирует сигнал на основании априорных данных и информации, поступающей из баз данных 15-17, для данных условий наблюдения, как если бы этот сигнал был получен от реального объекта.
Выход блока 6 и выходы каналов 2, 3, изображенные в виде блоков 20 и 21, соединены с входами 4, 1 2 блока оценки информативности признаков 22, соответственно. В свою очередь на третий вход блока 22 поступают значения вероятности правильного принятия решения о распознавании ИО. Данные значения будут являться исходными данными для работы блока 22 и дальнейшего назначения весовых коэффициентов. Первоначальные значения весовых коэффициентов возможно определить тремя способами:
- назначить идентичными для всех классов;
- воспользоваться имитационной моделью;
- использовать метод экспертных оценок.
Расчет информативности в блоке 22 предлагается производить в соответствии с энтропийным подходом следующим образом.
Рассмотрим процесс определения информативности. Входными данными для работы данного блока являются значения вероятности правильного принятия решения о распознавании. Они могут быть получены в режиме «обучения», при работе по априорно известному ИО или в результате имитационного моделирования с привлечением блока 9. Входные данные для блока оценки информативности 22 примут следующий вид:
w=1, 2, …, W,
где Diw - значение вероятности правильного принятия решения о распознавании i-го класса ИО по w-му признаку;
W - количество признаков распознавания.
Для определения информативности признаков воспользуемся понятием энтропии Нэнтр, которая представляет собой статистическую меру неопределенности (строк матрицы Iвх).
В работе [3] под информативными понимаются признаки, которые уменьшают неопределенность заданной ситуации распознавания. Исходя из этого, разумным правилом является выбор признаков, обеспечивающих минимизацию энтропии распознаваемых классов.

Применительно к решению данной задачи энтропия распознаваемых классов будет рассчитываться в соответствии с указанной работой по следующей формуле:

Результатом проведенных по формуле (7) расчетов будут W значений энтропии. В соответствии с идеей, рассмотренной в работе [3], более информативным будем полагать признак в случае, если соответствующее значение энтропии Hiw принимает минимальное значение по w, w=1, 2, …, W среди признаков данного вида.
Помимо решения указанной задачи энтропийный подход возможно применять для определения траектории принятия решения в блоке 11. Траектория принятия решения строится таким образом, чтобы первыми на вход системы распознавания поступали признаки, имеющие наименьшее значение энтропии.
Весовые коэффициенты предлагается назначить относительно минимального значения энтропии  с последующим нормированием. Таким образом, нормированные весовые коэффициенты будут рассчитываться по следующей формуле:
с последующим нормированием. Таким образом, нормированные весовые коэффициенты будут рассчитываться по следующей формуле:

Вектор нормированных коэффициентов примет следующий вид:
Результаты вычислений с выходов блоков 6, 20 и 21 поступают на блок оценки информативности 22 в виде следующей последовательности:
Таким образом, под Sw будем понимать решение о распознавании ИО по w признаку распознавания, который удалось получить в ходе сеанса измерений КРТИ.
После определения весовых коэффициентов на выходе блока 22 указанная последовательность примет следующий вид:

Далее в блоке 23 производится распознавание ИО по совокупности признаков следующим образом

Правило принятия решения относительно истинности той или иной гипотезы распознавания ИО по совокупности признаков формулируется следующим образом:
- если значение Трасп удовлетворяет условию Трасп≥Тпор, то справедлива гипотеза H0;
- если значение Трасп удовлетворяет условию Трасп<Тпор, то справедлива гипотеза H1.
Результат сеанса распознавания с выхода блока 23 поступает на интерфейс оператора 14 и отображается в символьной форме, удобной для восприятия оператором.
Из изложенного следует, что заявляемые способ радиотехнического распознавания излучающих объектов в воздушно-космическом пространстве и устройство для его реализации благодаря введению в него новых признаков способны решать задачу распознавания излучающих объектов в воздушно-космическом пространстве с более высоким уровнем вероятности правильного распознавания относительно аналогичного показателя прототипа за счет определения приоритетности распознавания классов на основании предварительной оценки информации; определения алгоритмов распознавания ИО, адаптированных под конкретный признак; определения информативности признаков распознавания и назначения весовых коэффициентов; учета информативности признаков при определении траектории принятия решения; проведения распознавания по совокупности признаков.
Признаки изобретения 1…23 (фиг. 1), а также связи между ними могут быть реализованы на базе существующих средств аналоговой и цифровой схемотехники.
Исходные данные для моделирования:
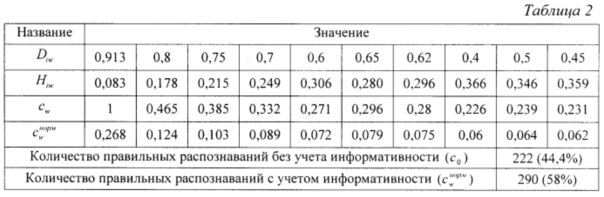
- количество признаков W=10;
- вероятности правильного принятия решения о распознавании i-го класса ИО по w-му признаку Diw (таблица 1);

- количество экспериментов М=500;
- значения весовых коэффициентов без использования энтропийного подхода  ;
;
- пороговое значение для распознавания по совокупности признаков Тпор=0,7.
Имитационное моделирование показало, что некоторые признаки соответствуют нескольким классам ИО. Для того чтобы обеспечить требуемую вероятность правильного распознавания, необходимо увеличивать число признаков, участвующих в распознавании. Анализ результатов моделирования показал, что применение весовых коэффициентов, рассчитанных на основании энтропийного подхода, позволило увеличить вероятность правильного распознавания (в данной ситуации) примерно на 14%, результаты вычислений приведены в таблице 2.
Для минимизации времени, необходимого для решения задачи распознавания ИО, может быть применена предварительная обработка. Она позволит распределить классы распознавания в порядке приоритета, а признаки, основываясь на их разделяющих качествах, в порядке информативности. Таким образом, распознавание будет начинаться с класса, к которому наиболее вероятно принадлежит ИО, с признака, который обладает наилучшими разделяющими качествами в рамках данного класса до момента превышения порогового значения Тпор.
Источники информации
1. Способ адаптивного распознавания объектов, система для адаптивного распознавания объектов: пат. 2384881 Рос. Федерации, МПК G06K 9/66 / Воскресенский В.В., Сборщиков В.А., Хилько А.А., Яхно В.Г., Хоботов А.Г., Остапенко Е.В.; заявитель и патентообладатель ЗАО "Альтаир-НТПЦ". - №2007130876/09; заявл. 14.08.2007; опубл. 20.03.2010. - 9 с.
2. Горелик А.Л. Современное состояние проблемы распознавания / А.Л. Горелик, И.Б. Гуревич, В.А. Скрипкин. - М.: Радио и связь, 1985. - 160 с.
3. Ту, Дж. Принципы распознавания образов / Дж. Ту, Р. Гонсалес; перевод с англ. И.Б. Гуревича / под общ. ред. Ю.И. Журавлева. - М.: Мир, 1978. - 414 с.
4. Гудаев Р.А., Катюха Р.В., Логунов C.B., Рогов Д.А. Применение информации, получаемой от средств радиотехнического контроля, для решения задач распознавания космических аппаратов // Труды Военно-космической академии имени А.Ф. Можайского / ВКА имени А.Ф. Можайского. - СПб., 2015. - Вып. 647. - С 137-142.
5. Куликов С.В., Гудаев Р.А., Балдычев М.Т., Гайчук Ю.Н. Решение задачи распознавания излучающих объектов на основе подхода к отождествлению их диаграмм направленности // Наукоемкие технологии / Радиотехника. - М., 2015. - Вып. 12. – С. 26-30.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ, СИСТЕМА ДЛЯ АДАПТИВНОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2007 |
|
RU2384881C2 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| Способ распознавания типа воздушной цели из класса "Самолет с турбореактивным двигателем" на основе нейронной сети | 2023 |
|
RU2826233C1 |
| Система обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта | 2021 |
|
RU2780607C1 |
| Система оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763384C1 |
| Интеллектуальная система обнаружения и классификации морских целей | 2018 |
|
RU2681242C1 |
| УСТРОЙСТВО ЛОГИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1998 |
|
RU2149420C1 |
| Способ обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта | 2021 |
|
RU2780606C1 |
| ИНТЕГРИРОВАННОЕ УСТРОЙСТВО ОПОЗНАВАНИЯ | 2015 |
|
RU2597870C1 |
| Способ распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2786518C1 |
Изобретение относится к области радиотехники. Техническим результатом является ускорение распознавания и повышение вероятности правильного распознавания излучающих объектов в воздушно-космическом пространстве. Способ радиотехнического распознавания излучающих объектов содержит этапы, на которых: определяют приоритетность распознавания классов на основании предварительной оценки информации; определяют алгоритмы распознавания излучающих объектов, адаптированные под конкретный признак; определяют информативность признаков распознавания и назначают весовые коэффициенты; определяют траекторию принятия решения с учетом информативности признаков; проводят распознавание по совокупности признаков. Для этого в устройство радиотехнического распознавания объектов дополнительно введены блок оценки координатной и некоординатной информации, блок предварительной обработки данных, блок перебора гипотез, блок накопления результатов предварительной оценки, блоки управления режимами распознавания и интерфейса оператора соответственно, блок предварительной обработки данных; блок оценки информативности, блок формирования эмпирических моделей, блок распознавания по совокупности признаков. 2 н.п. ф-лы, 2 ил., 2 табл.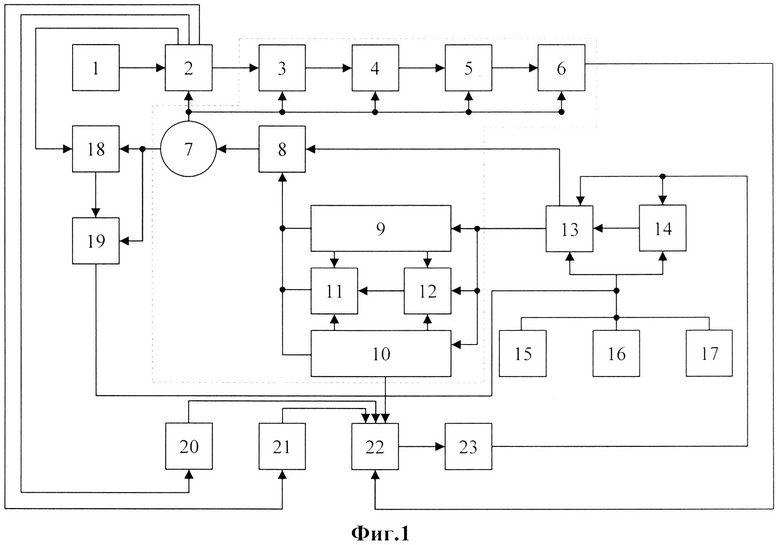
1. Способ радиотехнического распознавания излучающих объектов в воздушно-космическом пространстве, заключающийся в том, что формируют эмпирические модели об исследуемых излучающих объектах на основе априорных данных или по результатам предшествующих измерений, формируют имитационную модель для конкретных условий наблюдений на основании априорной информации о конструкции системы наблюдения и о статистических свойствах среды, в которой находится наблюдаемый объект с учетом шумов и помех; отличающийся тем, что формируют исходные данные для проведения распознавания на основании эмпирических и имитационных моделей, формируют предварительные оценки приоритета распознавания классов, оценивают информативность для назначения весовых коэффициентов и определения траектории поиска решения при распознавании класса по признакам, определяют алгоритмы распознавания излучающих объектов, адаптированных под конкретный признак, принимают решение о принадлежности излучающих объектов к определенному классу на основании совокупности частных решений о распознавании и соответствующих весовых коэффициентов.
2. Устройство радиотехнического распознавания излучающих объектов в воздушно-космическом пространстве, содержащее последовательно соединенные блок предварительной обработки данных, блок сравнения, первый блок накопления результатов сравнения в виде набора признаков распознаваемого объекта, блок сопоставления с порогами, второй блок накопления результатов сопоставления с порогами, на вторые входы которых подается сигнал со второго выхода блока перебора гипотез, информация с выходов первой, второй и третьей баз данных соответственно поступает на третий вход блока управления режимами распознавания и второй вход блока интерфейса оператора, выход которого соединен со вторым входом блока управления режимами распознавания, второй выход которого соединен с первым входом блока переключателя режимов распознавания, а первый выход блока управления режимами распознавания соединен с входом блока формирования имитационной модели, вторым входом блока адаптации конкретной гипотезы и входом блока формирования эмпирических моделей соответственно, первый вход блока адаптации соединен со вторым выходом блока формирования имитационной модели, третий вход блока адаптации соединен с третьим выходом блока формирования эмпирических моделей, в свою очередь выход блока адаптации соединен со вторым входом блока траектории поиска решения,
первый вход которого соединен с третьим выходом блока формирования имитационной модели, третий вход блока траектории поиска решения соединен со вторым выходом блока формирования эмпирической модели, сигналы с выходов блоков формирования имитационной модели, формирования эмпирических моделей и траектории поиска решения поступают на второй вход переключателя режимов распознавания, выход которого соединен с входом блока перебора гипотез, отличающееся тем, что дополнительно введены: блок оценки координатной и некоординатной информации, для подготовки исходных данных, необходимых для определения приоритета распознавания, третий блок накопления результатов предварительной оценки, предназначенный для накопления результатов сравнения в виде соответствующей последовательности, второй и третий каналы обработки РТИ, блок оценки информативности признаков распознавания, предназначенный для определения информативности признаков распознавания и назначения соответствующих весовых коэффициентов, и блок распознавания по совокупности признаков, предназначенный для принятия решения о принадлежности ИО к тому или иному классу на основании совокупности признаков, причем блок оценки координатной и некоординатной информации, первый вход которого соединен с первым выходом блока предварительной обработки данных, второй вход соединен с первым выходом блока перебора гипотез, а выход подключен к первому входу третьего блока накопления результатов предварительной оценки, второй вход которого соединен с первым выходом блока перебора гипотез, а выход соединен с третьим и вторым входами блоков управления режимами распознавания и интерфейса оператора соответственно, входы всех каналов соединены со вторым и третьим выходами блока предварительной обработки данных; блок оценки информативности на четвертый, второй и первый входы которого поступает информация с выхода каналов, а четвертый выход блока формирования эмпирических моделей соединен с третьим входом блока оценки информативности признаков, выход которого в свою очередь соединен с входом блока распознавания по совокупности признаков, выход которого соединен с первыми входами блоков управления режимами распознавания и блока интерфейса оператора.
| СПОСОБ АДАПТИВНОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ, СИСТЕМА ДЛЯ АДАПТИВНОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2007 |
|
RU2384881C2 |
| US 5475377 A, 12.12.1995 | |||
| US 6243501 B1, 05.06.2001 | |||
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПРЕДМЕТОВ, СПРЯТАННЫХ ПОД ОДЕЖДОЙ НА ТЕЛЕ ЧЕЛОВЕКА | 2013 |
|
RU2522853C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ОБРАЗОВ | 1998 |
|
RU2154302C2 |

