Предлагаемое изобретение относится к контрольно-измерительной технике и предназначено для измерения линейных ускорений транспортных средств, а также ускорений на центрифугах и в сейсморазведке, с обеспечением прямой радиопередачи выходных сигналов в диапазоне метровых волн.
Наиболее близким известным техническим решением является дифференциальный частотный акселерометр японской компании «Токио-Дента» [1], содержащий корпус с одной или двумя соосно размещенными инерционными массами и двумя пьезорезонаторами. Инерционные массы прототипа связаны друг с другом пружинным компенсатором механических несовершенств /температурного изменения коэффициента жесткости, гистерезиса/. При воздействии перегрузок по оси прототипа дифференциально изменяются резонансные частоты пъезорезонаторов, жестко связанных с инерционной массой, поскольку на один из них воздействует сила сжатия, а на другой - сила растяжения.
Существенными недостатками прототипа являются:
- узкий динамический диапазон и значительные погрешности, обусловленные гистерезисом и технологическими неточностями свойств материала пъезорезонаторов;
- малый коэффициент преобразования ускорений в изменение частот пъезорезонаторов, снижающий чувствительность, динамический диапазон и точность устройства.
Техническим результатом изобретения является повышение чувствительности, точности и динамического диапазона измеряемых ускорений при обеспечении на выходе датчика пригодных для прямой радиопередачи высокочастотных сигналов, несущих информацию об измеряемом ускорении и о температуре.
Технический результат достигается исполнением в акселерометре инерционной массы в виде двухмембранного полого упругого подвеса, заполненного демпфирующей жидкостью с высоким коэффициентом объемного расширения, дополнением мембран высокопроводящими немагнитными поверхностями, а также исполнением резонаторов в виде включенных в автогенераторы плоскоспиральных катушек индуктивности, размещенных соосно с зазором относительно двухмембранного упругого подвеса.
Структура предлагаемого акселерометра приведена на Фиг.1 (разрез по оси вращения). Корпус акселерометра образован двумя получашками 1, между которыми с помощью колец 2 защемлен по периметру двухмембранный упругий подвес 3, заполненный жидкостной инерционной массой 4. С двух сторон упругого элемента 3 закреплены по центру введенные в устройство немагнитные высокопроводящие дисковые электроды 5. Параллельно плоскостям электродов 5 между получашами 1 и кольцами 2 защемлены диэлектрические платы 6 и 7, на которых размещены обращенные к электродам 5 плоские спиральные LC-резонаторы 8 и 9. Катушки 8 и 9 соединены перемычками 10 с LC-автогенераторами 11 и 12 соответственно, размещенными на противоположных сторонах плат 6 и 7. Диэлектрические платы 11 и 12 для повышения жесткости прикреплены центрами к торцам получашек 1 стойками 13. Подача питания на автогенераторы 11 и 12, а также съем выходных частотных сигналов f1 и f2 осуществляется через присоединительные элементы 14 и 15. Резонансные частоты f1 и f2 зависят от измеряемого ускорения:
где Cн1, Lс1 - собственные емкость и индуктивность спирали-резонатора 8; Сн2, Lc2 - то же для спирали-резонатора 9;
S1, S2 - площади поверхностей спиралей 8 и 9 соответственно (с учетом краевых эффектов);
В0 - значение размеров В1 и В2 при ускорении a=0;
Кж - коэффициент жесткости упругого подвеса 3;
m - суммарная масса жидкости 4 и элементов 2, 5;
dcp - средний диаметр спиралей 8 и 9;
КL=0,95÷0,98 - коэффициент влияния экранов 5 на эквивалентные индуктивности резонаторов;
KI=6÷8 - коэффициент показателя степени.
Формулы 1 и 2 получены с учетом известной зависимости резонансной частоты LC резонатора от его эквивалентных параметров Lэ=Lc-Lвн; Сэ=Сн+Свн.
В данном случае:
(емкости, вносимые в LC резонаторы, образованные спиралями 8 и 9 и экранами 5). Вносимые в резонаторы индуктивности имеют вид [4]:
Эквивалентная схема акселерометра приведена на Фиг.2. Измеряемое ускорение α дифференциально воздействует на параметры Lвн1, Свн1 и Lвн2, Свн2 резонаторов 8 и 9 соответственно. В результате при изменении ускорения происходит противофазное изменение частот f1 и f2 автогенераторов 11 и 12. Емкости Свн1 и Свн2 являются паразитными и несколько снижают чувствительность, но тем не менее реальная чувствительность акселерометра к измеряемым ускорениям весьма высока.
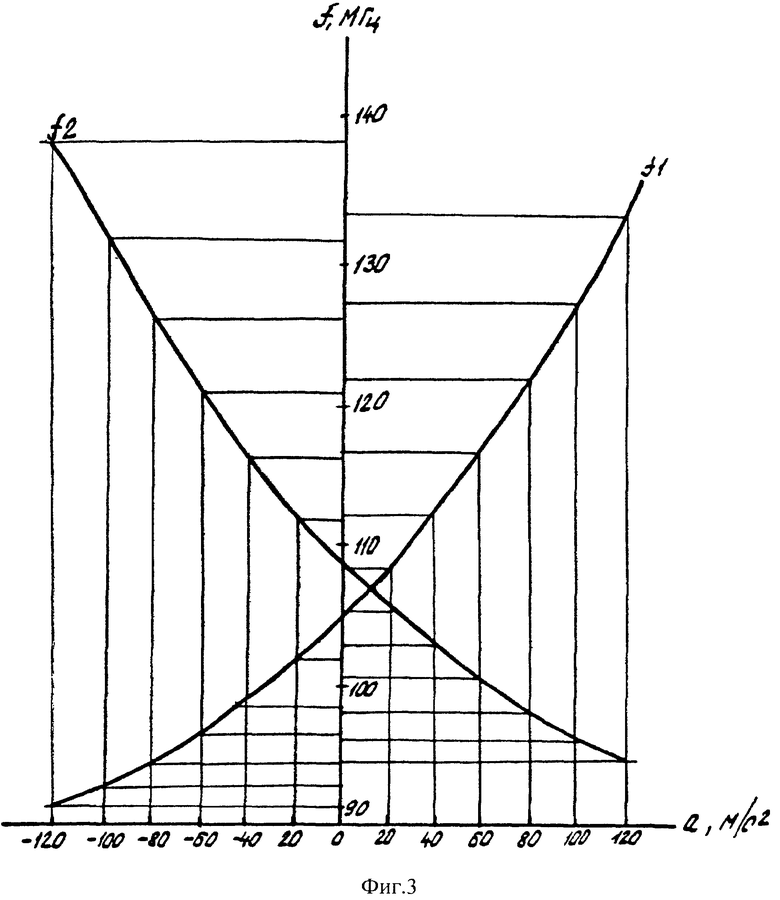
Для стабилизации напряжения питания автогенераторов в акселерометре используются раздельные для каждого генератора стабилизаторы напряжения 16 и 17 (на Фиг.1 не показаны, см. Фиг.4, элементы VT3, VD1, С3, R1). На Фиг.3 приведена типовая зависимость выходных частот f1 и f2 от измеряемого ускорения α=10÷120 м/с2. Характеристика получена экспериментально для акселерометра с параметрами:
Lс1=Lc2=1,05·10-6Гн; Cн1≈5,57·10-12ф; Cн2≈5,16·10-12ф; S1=S2≈2,5·10-4м2; dcp=0,03 м; в0=1,5·10-3 м; m=0,036 кг; Кж=4,32 кН/м.
При использовании в качестве информативного параметра разности частот Δf=f1-f2 коэффициент преобразования ускорения в частоту Кпр= составляет 398
составляет 398  при a=-120 м/с2; 323 при а=0 и 410 при a=120 м/с2. Высокий коэффициент преобразования и сравнительно небольшое его изменение в диапазоне измеряемых ускорений позволяет применить для оперативного преобразования выходных частот f1 и f2 в прямой цифровой код измеряемого ускорения известное устройство для обработки сигналов частотных датчиков [2], используя в качестве тактового генератора выход частоты f2 предлагаемого акселерометра.
при a=-120 м/с2; 323 при а=0 и 410 при a=120 м/с2. Высокий коэффициент преобразования и сравнительно небольшое его изменение в диапазоне измеряемых ускорений позволяет применить для оперативного преобразования выходных частот f1 и f2 в прямой цифровой код измеряемого ускорения известное устройство для обработки сигналов частотных датчиков [2], используя в качестве тактового генератора выход частоты f2 предлагаемого акселерометра.
Использование двухмембранного упругого подвеса с жидкостным заполнением и дифференциальной схемы с двумя LC-автогенераторами позволяет существенно снизить погрешности за счет гистерезиса и температурного изменения коэффициента жесткости Кж материала мембран упругого подвеса.
Гистерезис каждой мембраны компенсируют друг друга, поскольку силовое воздействие на эти мембраны от измеряемого ускорения всегда противофазны. Снижение с ростом температуры жесткости материала мембран компенсируется расширением жидкости 4 и усилением ее давления на внутренние стенки мембран. Полная компенсация при этом обеспечивается при выполнении равенства: dж-(dе+d1)=0,
где dж - температурный коэффициент объемного расширения жидкости 4;
de, d1 - температурные коэффициенты модуля упругости и линейного расширения материала мембран упругого подвеса 3.
Дополнительным полезным эффектом при заполнении упругого элемента жидкостью является наличие информации о температуре в частотных сигналах f1 и f2. Дело в том, что значение размеров В0 при α=0 в акселерометре является термозависимым:
где  - значение размеров Во при начальной температуре То;
- значение размеров Во при начальной температуре То;
Тс - температура окружающей среды и жидкости 4.
При использовании в качестве жидкости 4 толуола с dж=0,00109 I/K двухмембранного упругого подвеса 3 из берилливой бронзы БрБ2 с d1=16·10-6 I/K de=3,1·10-4 I/K обеспечивается снижение температурной нестабильности Кж на 30%. Термозависимое изменение частот f1 и f2 при этом соответствует значениям табл.1 (при ά=0).
Поскольку термозависимое изменение частот f1 и f2 синфазное, они автоматически взаимно компенсируются при обработке информации в известном устройстве [2].
В то же время, измеряя любую из частот при α=0 можно определить значение температуры Те, причем коэффициент преобразования температуры в частоту достаточно высок (см. табл.1). Для определения температуры Тc по термозависимому изменению частоты f1 или можно использовать известное устройство [3]. Путем последующей совместной обработки полученных на выходах известных устройств значений α и Тc можно вычислить температурную поправку на полученное значение ускорения α. Кроме того, в ряде случаев весьма полезно иметь информацию о температуре Тc без усложнения акселерометра дополнительным термодатчиком. Таким образом, в предложенном акселерометре использование двухмембранного упругого элемента с жидкостным заполнением позволяет:
- получить на выходе акселерометра информацию о температуре Тc без дополнительных датчика температуры и автогенератора;
- существенно снизить погрешность от гистерезиса упругого элемента;
- снизить температурную погрешность акселерометра за счет частичной компенсации снижения жесткости материала мембран расширением жидкости;
- осуществить коррекцию температурной погрешности при обработке частотных сигналов акселерометра во вторичной аппаратуре.
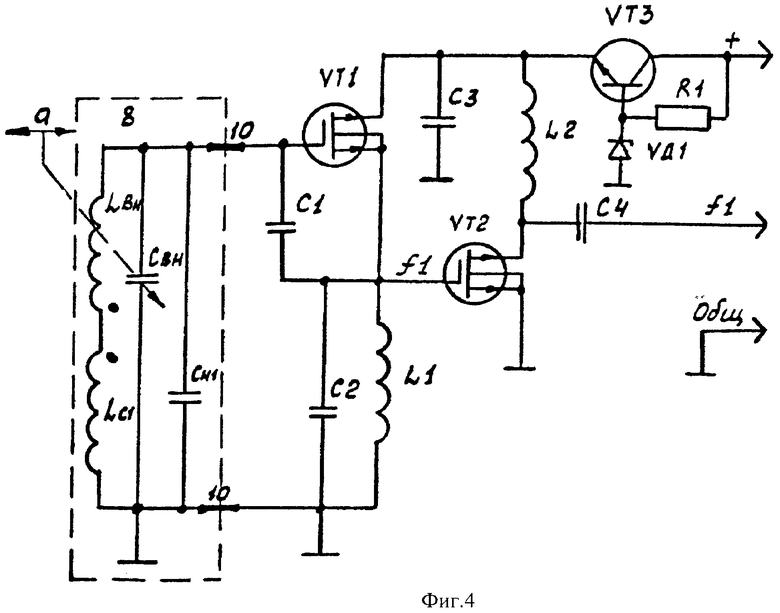
Автогенераторы 11 и 12 акселерометра могут быть выполнены по схеме Фиг.4 (для LC-автогенератора 11).
Спиральный резонатор 8 включен в частотозадающую цепь LC-автогенератора на элементе VT1. Элементами С1 и С2 задается глубина положительной обратной связи, частота f1 снимается с дросселя L1 и подается на выходной каскад на VT2 с индуктивной нагрузкой в виде элемента L2. Усиленная по амплитуде частота f1 снимается через элемент С4 на выход акселерометра. Элементы VT3, VD1, С3 обеспечивают стабилизацию напряжения питания автогенератора для снижения погрешности от изменения напряжения питания.
Полная экранировка друг от друга LC-автогенераторов 11 и 12 упругим элементом 3 и наличие раздельных стабилизаторов 16 и 17 (см. Фиг.2) исключает так называемый «захват» частот f1 и f2 даже при их близких друг другу значениях. Высокая крутизна характеристики акселерометра обеспечена за счет использования плоских спиральных индуктивностей 8 и 9, а также применением высокопроводящих немагнитных экранов 5 (например, из алюминия). Именно при этом сочетании обеспечивается наибольшее воздействие перемещения экрана 5 на индуктивную составляющую спирали и минимальное - на активную ее компоненту [4].
По сравнению с прототипом предложенное решение позволяет:
- повысить чувствительность за счет исполнения двухмембранного упругого подвеса и резонаторов в виде плоских спиральных индуктивностей;
- снизить погрешности за счет использования жидкостного заполнения упругого элемента и получить информацию о температуре обеспечить прямую радиопередачу выходных ВЧ сигналов за счет совмещения спиральных резонаторов с автогенераторами.
Предложенный акселерометр обладает следующими достоинствами:
- обеспечивает на выходе пригодные для прямой радиопередачи ВЧ сигналы, несущие информацию как об ускорении, так и о температуре;
- может работать в бортовой аппаратуре в широком температурном диапазоне;
- обладает более высокими динамическим диапазоном, чувствительностью и точностью;
- практически избавлен от гистерезиса за счет постоянного наличия давления жидкости на мебраны упругого подвеса.
Предложенный акселерометр имеет простую и жесткую конструкцию, может быть изготовлен с малой трудоемкостью, без использования уникального оборудования. Предпочтительно применение предложенного акселерометра в бортовой аппаратуре и испытательном оборудовании для измерения линейных ускорений и температуры.
Экспериментальные испытания действующих макетов акселерометра подтвердили его высокий коэффициент преобразования и высокие метрологические характеристики. Предельное значение измеряемых ускорений зависит от параметров m, Кж упругого элемента и может быть выбрано в границах 120÷5000 м/с2 при относительной суммарной погрешности не выше 0,1%.
Диапазон рабочих и измеряемых температур может находиться в границах 150÷400К. При использовании в качестве инерционной жидкости 4 толуола диапазон рабочих и измеряемых температур лежит в пределах 200÷383 К при погрешности измерения температуры на уровне десятых долей градусов Цельсия.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Дифференциальный частотный акселерометр. Сайт «Промышленные роботы», http://www.rworks.ru, c/28.
2. Авт. св. СССР №1182507. М.Кл. G06F 3/05. Устройство для обработки сигналов частотных датчиков. Опубл. в БИ №36, 1985 г.
3. Авт. св. СССР №970136. М.Кл. G01K 7/34. Устройство для измерения температуры. Опубл. в БИ №40, 1982 г.
4. Соболев B.C., Шкарлет Ю.М. Накладные и экранные датчики. Новосибирск: Наука, 1967 г., §3.5.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСЕЛЕРОМЕТР | 1989 |
|
RU2046348C1 |
| ЧАСТОТНЫЙ МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2007 |
|
RU2377575C2 |
| АКСЕЛЕРОМЕТР | 1998 |
|
RU2148831C1 |
| ЛИНЕЙНЫЙ АКСЕЛЕРОМЕТР | 2024 |
|
RU2837037C1 |
| СТРУННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2528103C1 |
| АКСЕЛЕРОМЕТР | 1990 |
|
RU2018852C1 |
| Дифференциальный пьезоэлектрический преобразователь | 1981 |
|
SU979902A1 |
| Дифференциальный угловой пьезоэлектрический акселерометр | 1983 |
|
SU1136084A1 |
| ЧАСТОТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ НЕГО | 2007 |
|
RU2401461C2 |
| Устройство для измерения расхода жидкости или газа | 1990 |
|
SU1739202A1 |
Изобретение относится к технике измерения линейных ускорений на борту транспортных средств и в составе испытательного оборудования с обеспечением возможности беспроводной прямой радиопередачи выходных сигналов в УКВ диапазоне. Акселерометр заключен в корпус, образованный получашками 1, между которыми защемлен по периметру двухмембранный упругий элемент 3, заполненный жидкостной инерционной массой 4. С элементом 3 соединены два немагнитных высокопроводящих экрана 5, перемещающиеся относительно плоских спиралей 8 и 9, выполненных на диэлектрических основаниях 6 и 7, включенных в LC-автогенераторы 11 и 12 с помощью перемычек 10. Подача питания и съем выходных частот LC-автогенераторов 11 и 12 осуществляется через разъемы 14 и 15. Деформация упругого элемента 3 под действием ускорения преобразуется в дифферециальное изменение выходных частот, а его деформация за счет теплового расширения жидкости 4 - в синфазное изменение этих частот. Изобретение обеспечивает повышение чувствительности, точности и получение на выходе пригодных для прямой радиопередачи высокочастотных сигналов, несущих информацию как об ускорении, так и о температуре. 4 з.п. ф-лы, 4 ил., 1 табл.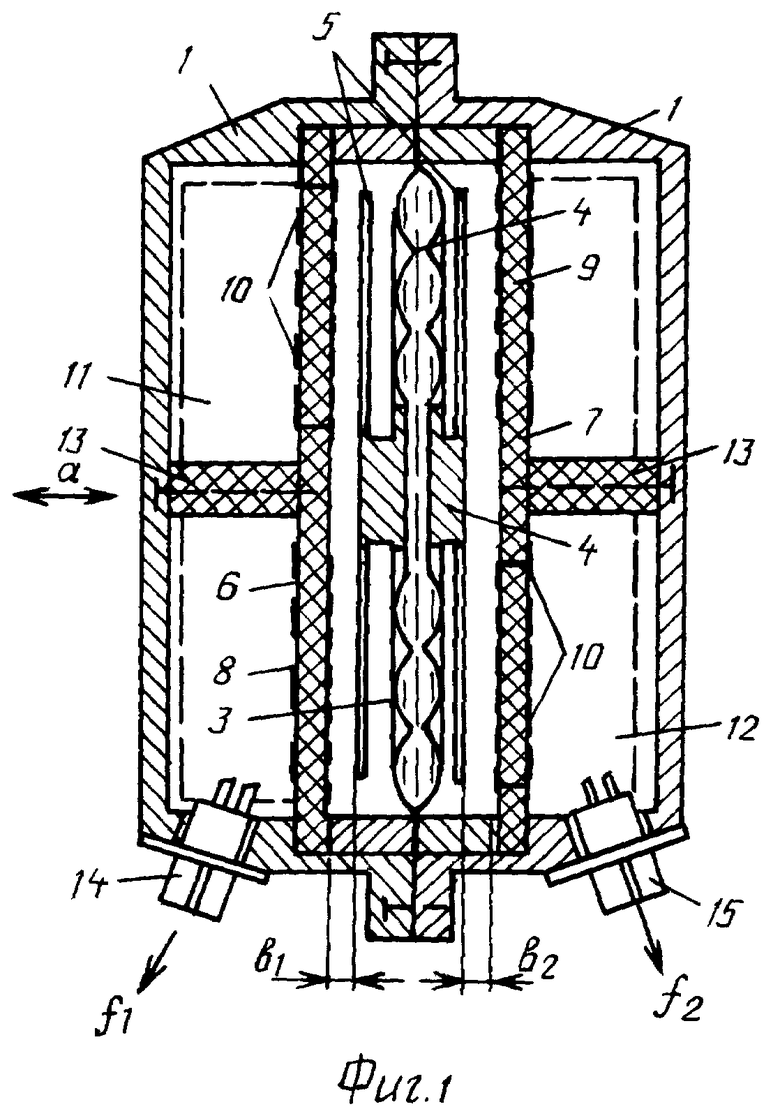
1. Дифференциальный частотный акселерометр, содержащий корпус, инерционную массу на упругом подвесе, воздействующую на имеющиеся в устройстве резонаторы, отличающийся тем, что упругий подвес выполнен в виде герметично соединенных по периметру гофрированных мембран с высокопроводящим немагнитным покрытием или экраном каждая, и заполнен жидкостью, выполняющей функцию инерционной массы, резонаторы в устройстве размещены на первой и второй диэлектрических платах, выполнены в виде плоскоспиральных катушек индуктивности, включенных в автогенераторы и размещены с зазором относительно немагнитной высокопроводящей поверхности мембран.
2. Дифференциальный частотный акселерометр по п.1, отличающийся тем, что коэффициент объемного расширения жидкости внутри упругого подвеса равен и противоположен по знаку сумме коэффициента линейного расширения и температурного коэффициента модуля упругости материала мембран.
3. Дифференциальный частотный акселерометр по п.1, отличающийся тем, что жидкость внутри упругого подвеса выбрана с большим коэффициентом объемного расширения.
4. Дифференциальный частотный акселерометр по п.1, отличающийся тем, что температурный коэффициент объемного расширения жидкости dж, температурные коэффициенты модуля упругости de и линейного расширения материала мембран упругого подвеса d1 выбираются с выполнением равенства: dж-(de+d1)=0.
5. Дифференциальный частотный акселерометр по п.1, отличающийся тем, что двухмембранный упругий элемент и диэлектрические платы защемлены по периметру между двумя введенными в устройство кольцами и двумя получашками корпуса.
| ДИФФЕРЕНЦИАЛЬНЫЙ ЧАСТОТНЫЙ АКСЕЛЕРОМЕТР | |||
| Сайт «Промышленные роботы», http://www.rworks.ru, с.28 | |||
| Дифференциальный струный акселерометр | 1973 |
|
SU575572A1 |
| АКСЕЛЕРОМЕТР | 1998 |
|
RU2148831C1 |
| Частотный датчик виброускорений | 1980 |
|
SU900191A1 |
| JP 7311219 A, 28.11.1995 | |||
| EP 0437397 A1, 17.07.1991 | |||
| Устройство для обработки сигналов частотных датчиков | 1984 |
|
SU1182507A1 |

