Изобретение относится к контрольно-измерительной технике и предназначено для оперативного цифрового измерения угловых перемещений в условиях действия интенсивных электромагнитных помех от исполнительных устройств роботов и может использоваться для построения портативных цифровых датчиков угловых перемещений.
Известен датчик угла поворота [1], содержащий магнитопровод, в виде незамкнутого кольца, распределенные по магнитопроводу первичную и вторичную обмотки и ротор в виде короткозамкнутого витка, связанный с контролируемым объектом.
Недостатками аналога [1] являются:
- низкая точность и помехоустойчивость измерения амплитудного выходного сигнала датчика;
- сложные конструкция датчика и технология равномерной намотки обмоток на магнитопровод;
- непригодность для измерения угловых перемещений в динамике.
Наиболее близким к предложенному известным техническим решением является высокочастотный датчик положения и скорости изменения положения объекта [2], содержащий отрезок линии в виде корпуса с проводящим покрытием, диэлектрического основания с проводящим проводником в виде группы коротких проводящих стержней, с одной стороны электрически короткозамкнутых между собой. Прототип обеспечивает оперативное измерение положения проводящей поверхности относительно разомкнутых концов проводящих стержней путем контроля частоты или амплитуды ВЧ колебаний на выходе ВЧ резонатора, образованного корпусом, диэлектрическим основанием и группой стержней.
Недостатками прототипа [2] при его применении для преобразования угла поворота в частоту являются:
- влияние величины зазора между вращающимся телом и группой стержней на частоту и амплитуду ВЧ колебаний на выходе датчика;
- значительное влияние дестабилизирующих факторов на результат измерения из-за одноканальной структуры датчика;
- низкая чувствительность выходной частоты к изменению углового положения вращающегося объекта;
- отсутствие в единой конструкции датчика встроенного преобразователя выходных сигналов в прямой код измеряемого углового перемещения.
Известно также измерительное информационное устройство (3), обеспечивающее оперативное преобразование частотных сигналов дифференциального датчика в прямой код измеряемой величины при любой аналитической зависимости частотных сигналов датчика от этой величины. Этот аналог позволяет производить точное преобразование малых угловых перемещений в прямой код измеряемой величины, однако при измерении больших угловых перемещений в нем отсутствует устройство для их преобразования в прямой цифровой код.
Техническим результатом изобретения является повышение быстродействия и точности измерения как малых, так и больших угловых перемещений в условиях интенсивных помех с оперативным преобразованием измеряемых перемещений в прямой цифровой код.
Для достижения технического результата:
- в датчике диэлектрическое основание выполнено подвижным в виде диска, а размещенные на этом основании токопроводящие проводники выполнены в виде сегментов, нанесенных с двух сторон диска, кроме того, в устройство введены две однослойные катушки индуктивности П-образного профиля и подключены в частотозадающую цепь первого и второго высокочастотных автогенераторов;
- в измерительное устройство введен частотный дискриминатор, датчик направления вращения, формирователь кода больших перемещений со входами начальной установки больших перемещений и со входом разрешения начальной установки, цифровые выходы которого подключены к введенным в устройство старшим разрядам имеющегося в устройстве цифрового индикатора, причем частотный дискриминатор подключен входами к выходам автогенераторов частотного датчика угловых перемещений, выход частотного дискриминатора подключен к счетному входу формирователя кода больших перемещений, а выход датчика направления вращения подключен во входу управления направлением счета формирователя кода больших перемещений
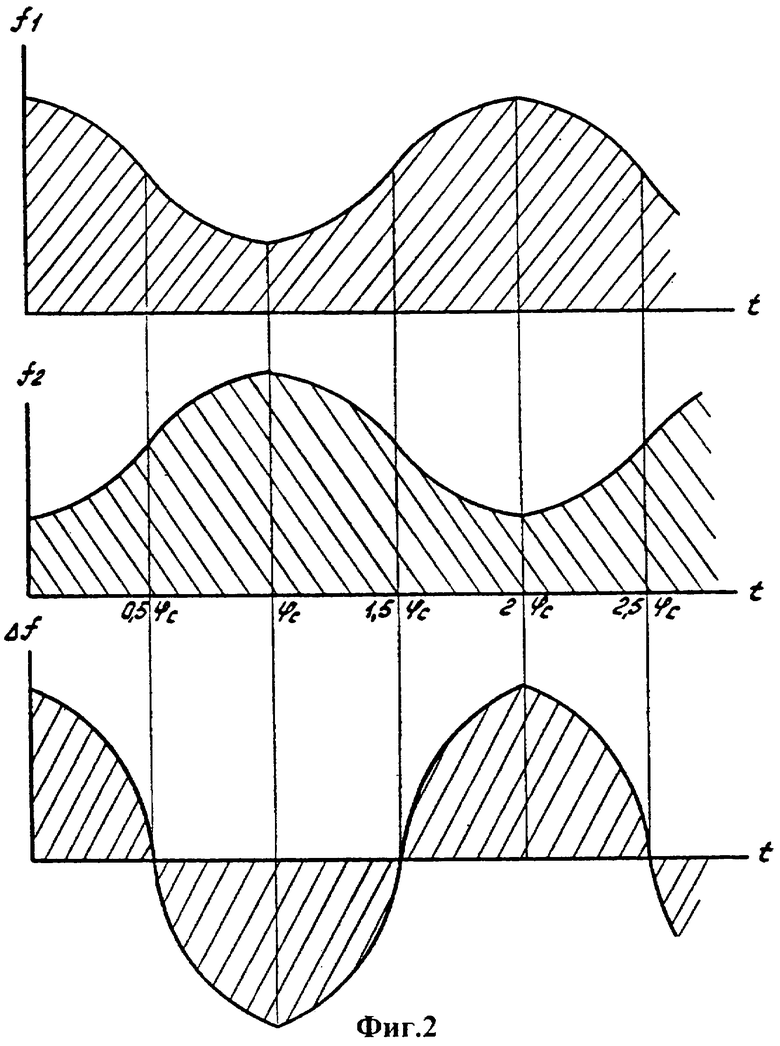
Структура предлагаемого датчика приведена на Фиг.1, на Фиг.2 представлена разностная частота Δf=f1-f2 генераторов 7 и 8 как функция углового положения диска I, на Фиг.3 приведена структура цифрового преобразователя угловых перемещений с предложенным частотным датчиком угловых перемещений. Датчик содержит диэлектрический диск 1, закрепленный на оси 2, причем на поверхности диска нанесены немагнитные высокопроводящие секторы 3, чередующиеся с диэлектрическими секторами 4. С диском 1 взаимодействуют две однослойные П-образные катушки индуктивности 5 и 6, включенные в частотозадающие цепи высокочастотных автогенераторов 7 и 8. Катушки 5 и 6 размещены таким образом, что их взаимное угловое положение отличается на угол φc секторов 3 и 4. Резонансные частоты f1 и f2 генераторов 7 и 8 могут быть представлены в следующем виде:


где LC - собственная индуктивность катушек 5 и 6;
L∂ - эквивалентная индуктивность сектора 3, взаимодействующего с катушкой индуктивности;
М - взаимоидуктивность сектора 3 и катушки при полностью введенном секторе в катушку;
Сн - начальная емкость LC контура, который задает резонансную частоту автогенераторов 7 и 8;
ξ0=8,8541·10-12 Ф/м - диэлектрическая постоянная;
S - площадь проводника катушки, взаимодействующая с проводящими секторами 3;
ξ - относительная диэлектрическая проницаемость газа в зазоре между катушкой индуктивности и сектором;
φc - угол сектора 3;
φn - угол перекрытия сектора 3 катушкой 7 и 8;
в - зазор между поверхностями катушки и сектора 3.
Разностная частота Δf=f1-f2 генераторов 7 и 8 представлена в виде графика Фиг.2 в функции от углового положения диска I.
За счет противофазного изменения частот f1 и f2 обеспечивается высокий коэффициент преобразования угловых перемещений в разность частот Δf при компенсации аддитивного смещения этих частот от дестабилизирующих факторов. При исходных данных
ξ0=8,854·10-12 Ф/м обеспечен коэффициент преобразования в пределах (306÷634) кГц/Град (см. табл.1).
При реально обеспечиваемой нестабильности частот высокочастотных автогенераторов 7 и 8 не выше 10-5 возможен отсчет угловых перемещений с абсолютной погрешностью не более 0,5×10-4 угловых градусов при достаточно малом времени измерения и высокой помехоустойчивости. Например, при требуемой дискретности цифрового отсчета угла не более 1/300 град время tи однократного цифрового измерения разностной частоты Δf может быть ограничено значением 10-3 с. В таблице 1 приведены основные параметры датчика в функции от измеряемого углового перемещения.
Таблица 1 подтверждает возможность точного контроля угловых перемещений исполнительных органов роботов при достаточно высокой скорости изменения угла.
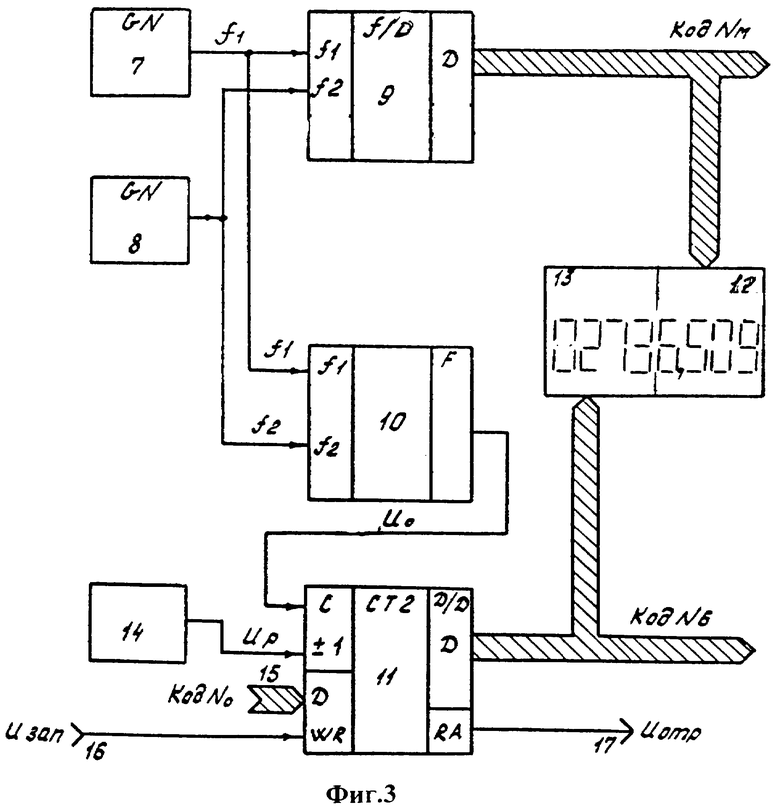
Структура цифрового преобразователя угловых перемещений с предложенным датчиком приведена на Фиг.3.
В состав измерителя входят генераторы 7 и 8 предлагаемого датчика, частотно-цифровой преобразователь (ЧЦП) 9 частот f1 и f2 в код Nм малых перемещений, (выполненный, например, по а.с. СССР №1314360), а также частотный дискриминатор 10 формирователь 11 кода Nσ больших перемещений, старшие разряды 13 цифрового индикатора 12, датчик 14 направления вращения, входы 15 подачи кода N0 начальной установки и вход 16 разрешения начальной установки счетчика 11. Перед началом работы диск 1 датчика устанавливается в начальное положение, и на вход 14 формирователя 11 подается сигнал Uзап, при этом формирователь 11 устанавливается в начальное состояние, заданное кодом N0 на его входах. Код N0 может подаваться с клавиатуры или с выхода другого внешнего цифрового задатчика. На выходах ЧЦП 9 с задержкой в интервал счета tu обновляется информация о значении малых перемещений (код Nм) независимо от скорости и направления вращения, на индикаторе 13 индицируется значение угловых перемещений. При наличии вращения диска I в моменты равенства частот f1 и f2 на выходе элемента 10 формируется сигнал U0, и формирователь 11 изменяет свое состояние на единицу в сторону увеличения (при Up=I) или в сторону уменьшения (при Up=0).
Малые угловые перемещения могут отсчитываться по комбинации частот f1 и f2, а перемещения, превышающие угол φc целесообразно отсчитывать по числу срабатываний частотного дискриминатора 10, например в момент равенства частот f1 и f2. Угловой размер секторов 3 может быть выбран с обеспечением неповторяемых комбинаций частот f1 и f2 в пределах малых перемещений до 10 угловых градусов, (например φc=5), в то время как большие перемещения будут отсчитываться с шагом в 10 угловых градусов.
Таким образом, на младших разрядах 12 и старших разрядах 13 цифрового индикатора и на выходах преобразователя Фиг.3 выдаются цифровые коды Nσ и Nм, несущие информацию о значении углового перемещения диска 1 и оси 2.
Устройство Фиг.3 может работать в режиме отсчета заданного кодом N0 значения больших перемещений, если обеспечить сигналом Up=0 вычитающий счет импульсов U0 после записи в формирователь 11 кода N0. Тогда, при отсчете заданных кодом больших перемещений на выходе RA (нулевое состояние) формирователя 11 имеет место сигнал Uотр=I, который сигнализирует об отработке кода N0. Данный режим работы устройства Фиг.3 необходим в робототехнике для задания определенных угловых перемещений исполнительных элементов роботов.
Частотно-цифровой преобразователь 9 может быть реализован на базе известного устройства [3], формирователь 11 может быть реализован на реверсивном счетчике с предустановкой кода, к выходам которого подключено энергонезависимое запоминающее устройство, с помощью которого обеспечивается преобразование выходного кода счетчика в код Nσ больших перемещений.
По сравнению с прототипом [2] предложенный датчик обладает следующими достоинствами:
- некритичность датчика к осевому смещению диэлектрического диска 1 относительно П-образных катушек 5 и 6;
- значительно меньшее влияние температуры, напряжения питания и других дестабилизирующих факторов на результат измерения за счет одинакового аддитивного смещения частот f1 и f2;
- более высокие чувствительность и точность датчика из-за дифференциального изменения частот f1 и f2 от изменения угла поворота φ.
По сравнению с известным измерительным устройством (3) предложенная структура измерительного устройства Фиг.3 обеспечивает оперативный цифровой отсчет сколь угодно больших угловых перемещений, задаваемых кодом N0. Наиболее близким известным промышленным вариантом является серийно выпускаемый угломерный стол СТ-320 с цифровым отсчетом, в котором в качестве датчика угла поворота использованы оптический растровый датчик на интерференционных решетках. Применение базового варианта в роботах затруднено в связи с высокими требованиями к отсутствию загрязнения интерференционных решеток, что в реальных условиях применения роботов практически невыполнимо из-за недопустимого увеличения габаритов датчика и необходимости его дополнения пылевлагозащищающей арматурой.
Предложенный датчик некритичен к загрязнению диска 1 пылью, маслом, моющими средствами, допускает осевой люфт диска в пределах зазора П-образных катушек 5 и 6. Габариты датчика практически определяются диаметром диска I, который может быть выбран в пределах 10-80 мм при общей высоте конструкции в пределах от 2 мм до 10 мм.
Известные другие аналоги [4, 5] имеют дисковые роторы, на которых нанесены или печатные обмотки, или электромагнитные экраны в виде изогнутых секторов. Их недостатком являются низкие чувствительность и помехоустойчивость из-за амплитудного метода съема выходного сигнала. В аналоге [5] имеются высокочастотный источник тока, питающий первичную обмотку, а со вторичных печатных обмоток снимают ЭДС и подают на фазовые демодуляторы. Общим для аналогов [4, 5] существенным недостатком является влияние зазора между ротором и статором на результат измерения. В предложенном решении это влияние практически исключено за счет частотного выхода и конструкции катушек индуктивности, охватывающих подвижный диск с двух сторон. При выявлении признаков, сходных с признаками, известными в науке и технике, последних обнаружено не было - следовательно, заявляемое техническое решение соответствует критерию "существенные отличия". Предложенная конструкция датчика технологична, процесс его изготовления и сборки приемлем для автоматизации. Цифровое измерительное устройство конструктивно можно выполнить в виде ЧИПа и встроить в структуру датчика, а цифровые выходы кодов Nм и Nб подключить к внешнему процессору или к любому другому цифровому устройству.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Авт. св. СССР №1232937, М. Кл. G01B 7/30.
2. Авт. св. СССР №859800, М. Кл. G01B 7/00.
3. Авт.св. СССР №1314360, М. Кл. G08C 19/28.
4. Авт.Св. СССР №442945, М. Кл. G01B 7/30.
5. Авт.Св. СССР №887921, М. Кл. G01B 7/30.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕХНОЛОГИЯ ОПРЕДЕЛЕНИЯ ВЕЩЕЙ | 2010 |
|
RU2453003C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ЧАСТОТНЫЙ АКСЕЛЕРОМЕТР | 2007 |
|
RU2385463C2 |
| ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2020 |
|
RU2747915C1 |
| СПОСОБ ВИХРЕТОКОВОГО ИЗМЕРЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ПАРАМЕТРОВ | 2020 |
|
RU2747916C1 |
| УСТРОЙСТВО ДЛЯ ТЕРАПЕВТИЧЕСКОГО ВОЗДЕЙСТВИЯ ЭЛЕКТРОМАГНИТНЫМ ПОЛЕМ | 2005 |
|
RU2317831C2 |
| МОНИТОРНАЯ СИСТЕМА ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2008 |
|
RU2371085C1 |
| СПОСОБ ФИЗИОТЕРАПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2260457C2 |
| СПОСОБ КОНТРОЛЯ ПЛОСКОСТНОСТИ ПОВЕРХНОСТЕЙ ТРУБОПРОВОДНОЙ АРМАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2386104C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА НАКЛОНА ПЛОСКОСТИ | 2014 |
|
RU2577804C1 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ, КОНТРОЛЯ И УПРАВЛЕНИЯ РАСХОДОМ СЕМЯН И МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 1992 |
|
RU2043007C1 |
Изобретение относится к контрольно-измерительной технике и предназначено для оперативного цифрового измерения угловых перемещений в условиях действия интенсивных электромагнитных помех от исполнительных устройств роботов. Техническим результатом изобретения является повышение быстродействия и точности измерения угловых перемещений в условиях интенсивных помех с обеспечением прямого цифрового отсчета как малых, так и больших угловых перемещений. Для достижения технического результата в частотном датчике диэлектрическое основание в виде диска выполнено вращающимся, а размещенные на этом основании токопроводящие проводники выполнены в виде сегментов, нанесенных с двух сторон диска, кроме того, в устройство введены две однослойные катушки индуктивности П-образного профиля и подключены в частотозадающую цепь первого и второго высокочастотных автогенераторов. Предложенный датчик некритичен к загрязнению пылью, маслом, моющими средствами и допускает осевой люфт диска в пределах зазора П-образных катушек 5 и 6. Измерительное устройство может быть исполнено в виде ЧИПа и встроено в структуру датчика. Габариты датчика практически определяются диаметром диска, который может быть выбран в пределах 10-80 мм при общей высоте конструкции в пределах от 2 мм до 10 мм. 2 н. и 1 з.п. ф-лы, 3 ил., 1 табл.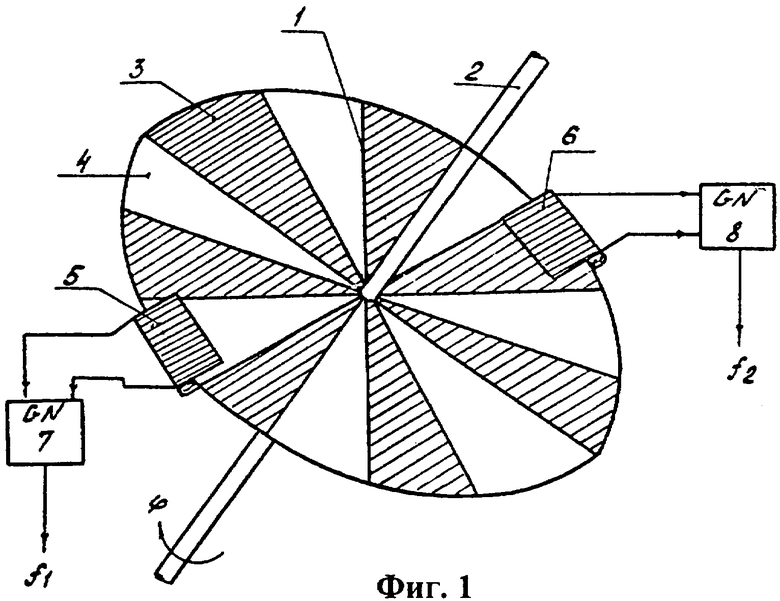
1. Частотный датчик угловых перемещений, содержащий диэлектрическое основание, размещенную на этом основании группу токопроводящих элементов, автогенератор высокочастотных колебаний, и элемент, передающий угловое перемещение, отличающийся тем, что основание выполнено в виде подвижного диска с нанесенными по обе стороны токопроводящими элементами в виде секторов, равномерно размещенных по окружности, в устройство введены две охватывающие подвижный диск с зазором однослойные катушки индуктивности П-образной формы и второй автогенератор высокочастотных колебаний, причем подвижный диск жестко связан с элементом, передающим угловое перемещение, а первая и вторая катушки индуктивности смещены одна относительно другой по окружности диска на ширину проводящего сектора и включены в частотозадающие цепи соответственно первого и второго автогенераторов высокочастотных колебаний.
2. Частотный датчик угловых перемещений по п.1, отличающийся тем, что число проводящих секторов на подвижном диске выбрано четным, а материал секторов выбран немагнитным.
3. Измерительное информационное устройство для частотного датчика угловых перемещений, содержащее частотно-цифровой преобразователь, ко входам которого подключены выходы высокочастотных автогенераторов частотного датчика угловых перемещений, а к выходам частотно-цифрового преобразователя подключен цифровой индикатор, отличающееся тем, что в устройство введены частотный дискриминатор, датчик направления вращения, формирователь кода больших перемещений со входами начальной установки больших перемещений и со входом разрешения начальной установки, цифровые выходы формирователя кода больших перемещений подключены к старшим разрядам имеющегося в устройстве цифрового индикатора, причем частотный дискриминатор подключен входами к выходам высокочастотных автогенераторов частотного датчика угловых перемещений, выход частотного дискриминатора подключен к счетному входу формирователя кода больших перемещений, а выход датчика направления вращения подключен во входу управления направлением счета формирователя кода больших перемещений.
| Высокочастотный датчик положения и скорости изменения положения объекта | 1979 |
|
SU859800A1 |
| Датчик угла поворота | 1984 |
|
SU1232937A1 |
| Измерительное информационное устройство | 1984 |
|
SU1314360A1 |
| Датчик углового положения | 1979 |
|
SU887921A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГОЛ—КОД | 0 |
|
SU327509A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГОЛ-КОД | 0 |
|
SU332487A1 |
| Устройство для формирования двоичного кода | 1981 |
|
SU964699A1 |
| Устройство задания и передачи кодов для согласованного управления | 1987 |
|
SU1603342A1 |
| RU 2003114398 A, 20.01.2005 | |||
| US 4383317 A, 10.05.1983. | |||

