Изобретение относится к автоматике и вычислительной технике и может быть использовано в специализированных устройствах вычислительной техники для моделирования процесса обнаружения подвижного объекта космическим аппаратом (КА).
Известно устройство, содержащее регистр, две группы регистров, генератор тактовых импульсов, счетчик, компаратор, блок умножения импульсов, два блока вычитания, блок умножения на «0», два блока умножения, интегратор [1].
Недостатком устройства являются относительно узкие функциональные возможности.
Наиболее близким к заявляемому устройству является устройство, содержащее элемент И, два счетчика, блок хранения векторов, два блока алгебраического суммирования, четыре регистра, блок сравнения с допуском, коммутатор, блок памяти, два элемента задержки, элемент ИЛИ [2].
Недостатком наиболее близкого технического решения являются относительно узкие функциональные возможности, не позволяющие моделировать процесс обнаружения космическим аппаратом подвижного объекта.
Требуемый технический результат - расширение функциональных возможностей путем обеспечения моделирования процесса обнаружения космическим аппаратом подвижного объекта.
Требуемый технический результат достигается тем, что в устройство, содержащее блок хранения векторов, введены блок расчета сферического линейного расстояния на местности, блок расчета высоты орбиты КА, блок расчета угла отклонения проецирующего луча от местной вертикали, блок расчета предельного линейного разрешения и блок расчета вероятности обнаружения подвижного объекта, при этом первый выход блока хранения векторов соединен с первым входом блока расчета сферического линейного расстояния на местности и вторым входом блока расчета высоты орбиты КА, а второй выход блока хранения векторов соединен с третьем входом блока расчета сферического линейного расстояния на местности, выход блока расчета высоты орбиты КА соединен с первым входом блока расчета угла отклонения проецирующего луча от местной вертикали и пятым входом блока расчета предельного линейного разрешения, выход блока расчета сферического линейного расстояния на местности соединен с третьим входом блока расчета угла отклонения проецирующего луча от местной вертикали и вторым входом блока расчета предельного линейного разрешения, выход блока расчета угла отклонения проецирующего луча от местной вертикали соединен с первым входом блока расчета предельного линейного разрешения, выход которого соединен с первым входом блока расчета вероятности обнаружения подвижного объекта, причем на второй вход расчета сферического линейного расстояния на местности и первый вход блока расчета высоты орбиты КА, а также второй вход блока расчета угла отклонения проецирующего луча от местной вертикали и четвертый вход блока расчета предельного линейного разрешения подано значение Rz - радиуса Земли, а на второй и третий вход блока расчета вероятности обнаружения подвижного объекта подаются значения S - ширины подвижного объекта, и D - длины подвижного объекта соответственно, а также на третий вход блока расчета предельного линейного разрешения подано значение α - половина угла мгновенного поля зрения аппаратуры разведки, установленной на КА.
Анализ научно-технической литературы показал, что до даты подачи заявки отсутствовали устройства с указанной совокупностью признаков.
Следовательно, предложение отвечает требованию новизны.
Кроме того, требуемый технический результат достигается всей вновь введенной совокупностью существенных признаков, которая в известной научно-технической литературе не обнаружена.
Следовательно, предложение отвечает требованию изобретательского уровня.
Входящие в состав устройства элементы охарактеризованы на функциональном уровне, и описываемая форма реализации предполагает использование программируемого (настраиваемого) многофункционального средства. Сведения, подтверждающие возможность выполнения таким средством конкретной предписываемой ему в составе данного устройства функции, представлены ниже в виде соответствующего математического выражения, что позволяет сделать вывод о соответствии предложения требованию промышленной применимости.
На чертеже представлена структурная схема устройства для моделирования процесса обнаружения подвижного объекта.
Устройство для моделирования процесса обнаружения подвижного объекта содержит блок хранения векторов 1, блок расчета сферического линейного расстояния на местности 2, блок расчета высоты орбиты КА 3, блок расчета угла отклонения проецирующего луча от местной вертикали 4, блок расчета предельного линейного разрешения 5 и блок расчета вероятности обнаружения подвижного объекта 6.
При этом входом устройства для моделирования процесса обнаружения подвижного объекта является информация о положении КА на орбите -  и подвижного объекта -
и подвижного объекта -  , находящаяся в блоке хранения векторов 1, при этом первый выход блока хранения векторов 1 соединен с первым входом блока расчета сферического линейного расстояния на местности 2 и вторым входом блока расчета высоты орбиты КА 3, а второй выход блока хранения 1 соединен с третьим входом блока расчета сферического линейного расстояния на местности 2, выход блока расчета высоты орбиты КА 3 соединен с первым входом блока расчета угла отклонения проецирующего луча от местной вертикали 4 и пятым входом блока расчета предельного линейного разрешения 5, выход блока расчета сферического линейного расстояния на местности 2 соединен с третьим входом блока расчета угла отклонения проецирующего луча от местной вертикали 4 и вторым входом блока расчета предельного линейного разрешения 5, выход блока расчета угла отклонения проецирующего луча от местной вертикали 4 соединен с первым входом блока расчета предельного линейного разрешения 5, выход которого соединен с первым входом блока расчета вероятности обнаружения подвижного объекта 6, причем на второй вход блок расчета сферического линейного расстояния на местности 2 и первый вход блока расчета высоты орбиты КА 3, а также второй вход блока расчета угла отклонения проецирующего луча от местной вертикали 4 и четвертый вход блока расчета предельного линейного разрешения 5 подано значение Rz - радиуса Земли, а на второй и третий входы блока расчета вероятности обнаружения подвижного объекта 6 подаются значения S - ширина подвижного объекта и D - длина подвижного объекта соответственно, а также на третий вход блока расчета предельного линейного разрешения 5 подано значение α - половина угла мгновенного поля зрения аппаратуры разведки, установленной на КА.
, находящаяся в блоке хранения векторов 1, при этом первый выход блока хранения векторов 1 соединен с первым входом блока расчета сферического линейного расстояния на местности 2 и вторым входом блока расчета высоты орбиты КА 3, а второй выход блока хранения 1 соединен с третьим входом блока расчета сферического линейного расстояния на местности 2, выход блока расчета высоты орбиты КА 3 соединен с первым входом блока расчета угла отклонения проецирующего луча от местной вертикали 4 и пятым входом блока расчета предельного линейного разрешения 5, выход блока расчета сферического линейного расстояния на местности 2 соединен с третьим входом блока расчета угла отклонения проецирующего луча от местной вертикали 4 и вторым входом блока расчета предельного линейного разрешения 5, выход блока расчета угла отклонения проецирующего луча от местной вертикали 4 соединен с первым входом блока расчета предельного линейного разрешения 5, выход которого соединен с первым входом блока расчета вероятности обнаружения подвижного объекта 6, причем на второй вход блок расчета сферического линейного расстояния на местности 2 и первый вход блока расчета высоты орбиты КА 3, а также второй вход блока расчета угла отклонения проецирующего луча от местной вертикали 4 и четвертый вход блока расчета предельного линейного разрешения 5 подано значение Rz - радиуса Земли, а на второй и третий входы блока расчета вероятности обнаружения подвижного объекта 6 подаются значения S - ширина подвижного объекта и D - длина подвижного объекта соответственно, а также на третий вход блока расчета предельного линейного разрешения 5 подано значение α - половина угла мгновенного поля зрения аппаратуры разведки, установленной на КА.
Работает устройство для моделирования процесса обнаружения подвижного объекта следующим образом.
Предполагается, что имеется РЛС, регистрирующая координаты КА на момент времени t в геостационарной системе координат -  и имеется датчик на подвижном объекте, который определяет его координаты в той же системе координат -
и имеется датчик на подвижном объекте, который определяет его координаты в той же системе координат -  . В блоке хранения векторов 1 находятся вектора и
. В блоке хранения векторов 1 находятся вектора и  на момент времени t.
на момент времени t.
Затем на первый и третий вход блока расчета сферического линейного расстояния на местности 2 передаются данные из первого и второго выхода блока хранения векторов 1 о местоположении КА и подвижного объекта в геоцентрической системе координат соответственно. На второй вход блока расчета сферического линейного расстояния на местности 2 подано значение Rz - радиус Земли. В блоке расчета сферического линейного расстояния на местности 2 по формуле (1) рассчитывается значение L - сферическое линейное расстояние на местности от подспутниковой точки до подвижного объекта:

где ={Хка, Yка, Zка} - вектор, характеризующий положение КА в геоцентрической системе координат на момент времени t;
 ={Хоб, Yоб, Zоб} - вектор, характеризующий положение подвижного объекта на местности в геоцентрической системе координат на момент времени t. Так же на второй вход блока расчета высоты орбиты КА 3 передается из первого выхода блока хранения векторов 1 значение и на первый вход блок расчета высоты орбиты КА подано значение Rz. В данном блоке по формуле (2) рассчитывается значение Н - высоты орбиты КА над поверхностью Земли:
={Хоб, Yоб, Zоб} - вектор, характеризующий положение подвижного объекта на местности в геоцентрической системе координат на момент времени t. Так же на второй вход блока расчета высоты орбиты КА 3 передается из первого выхода блока хранения векторов 1 значение и на первый вход блок расчета высоты орбиты КА подано значение Rz. В данном блоке по формуле (2) рассчитывается значение Н - высоты орбиты КА над поверхностью Земли:

Далее, на первый и третий входы блока расчета угла отклонения проецирующего луча от местной вертикали 4 из выходов блоков расчета высоты орбиты КА 3 и расчета сферического линейного расстояния на местности 2 передаются значения Н и L соответственно. На второй вход блока расчета угла отклонения проецирующего луча от местной вертикали 4 подано значение Rz. В блоке расчета угла отклонения проецирующего луча от местной вертикали 4 по формуле (3) осуществляется расчет ϕ - угол отклонения проецирующего луча от местной вертикали:

После расчета ϕ данное значение из выхода блока расчета угла отклонения проецирующего луча от местной вертикали 4 передается на первый вход блока расчета предельного линейного разрешения 5. Так же на третий вход данного блока передаются значения α - половина угла мгновенного поля зрения аппаратуры разведки, установленной на КА (характеристика аппаратуры разведки, установленной на КА), а на четвертый вход блока расчета предельного линейного разрешения 5 подано значение Rz. Из выходов блока расчета сферического линейного расстояния на местности 2 и блока расчета высоты орбиты КА 3 на второй и пятый вход блока расчета предельного линейного разрешения 5 передаются значения L и Н соответственно. В блоке расчета предельного линейного разрешения 5 по формуле (4) осуществляется расчет Δlp - предельного линейного разрешения:

Вероятность обнаружения подвижного объекта Роб зависит от соотношения размеров обнаруживаемого объекта и предельного разрешения в изображении подвижного объекта на снимке, таким образом, после расчета значения Δlр из выхода блока расчета предельного линейного разрешения 5 данное значение передается на первый вход блока расчета вероятности обнаружения подвижного объекта 6, так же на второй и третий входы данного блока передаются значения S - ширина подвижного объекта и D - длина подвижного объекта соответственно. В блоке расчета вероятности обнаружения подвижного объекта 6 по формуле (5) осуществляется расчет Роб - вероятности обнаружения подвижного объекта:

Указанный алгоритм расчета вероятности обнаружения подвижного объекта реализуется следующим образом.
При запуске устройства от внешнего источника, не показанного на чертеже, в блок хранения векторов 1 передаются координаты КА в геоцентрической системе координат - и текущие координаты подвижного объекта в геоцентрической системе координат -  на момент времени t.
на момент времени t.
Затем на первый и третий вход блока расчета сферического линейного расстояния на местности 2 передаются данные из первого и второго выхода блока хранения векторов 1 о местоположении КА - и подвижного объекта в геоцентрической системе координат -  соответственно. На второй вход блока расчета сферического линейного расстояния на местности 2 подано значение Rz - радиус Земли. В блоке расчета сферического линейного расстояния на местности 2 по формуле (1) рассчитывается значение L - сферическое линейное расстояние на местности от подспутниковой точки до подвижного объекта.
соответственно. На второй вход блока расчета сферического линейного расстояния на местности 2 подано значение Rz - радиус Земли. В блоке расчета сферического линейного расстояния на местности 2 по формуле (1) рассчитывается значение L - сферическое линейное расстояние на местности от подспутниковой точки до подвижного объекта.
Так же на второй вход блока расчета высоты орбиты КА 3 передается из первого выхода блока хранения векторов 1 значение и на первый вход блок расчета высоты орбиты КА подано значение Rz. В данном блоке по формуле (2) рассчитывается значение Н - высоты орбиты КА над поверхностью Земли.
Далее, на первый и третий входы блока расчета угла отклонения проецирующего луча от местной вертикали 4 из выходов блоков расчета высоты орбиты КА 3 и расчета сферического линейного расстояния на местности 2 передаются значения Н и L соответственно. На второй вход блока расчета угла отклонения проецирующего луча от местной вертикали 4 подано значение Rz. В блоке расчета угла отклонения проецирующего луча от местной вертикали 4 по формуле (3) осуществляется расчет ϕ - угол отклонения проецирующего луча от местной вертикали.
После расчета ϕ данное значение из выхода блока расчета угла отклонения проецирующего луча от местной вертикали 4 передается на первый вход блока расчета предельного линейного разрешения 5. Так же на третий вход данного блока передаются значения α - половина угла мгновенного поля зрения аппаратуры разведки, установленной на КА (характеристика аппаратуры разведки, установленной на КА), а на четвертый вход блока расчета предельного линейного разрешения 5 подано значение Rz. Из выходов блока расчета сферического линейного расстояния на местности 2 и блока расчета высоты орбиты КА 3 на второй и пятый вход блока расчета предельного линейного разрешения 5 передаются значения L и Н соответственно. В блоке расчета предельного линейного разрешения 5 по формуле (4) осуществляется расчет Δlp - предельного линейного разрешения.
Вероятность обнаружения подвижного объекта Роб зависит от соотношения размеров обнаруживаемого объекта и предельного разрешения в изображении подвижного объекта на снимке, таким образом, после расчета значения Δlp из выхода блока расчета предельного линейного разрешения 5 данное значение передается на первый вход блока расчета вероятности обнаружения подвижного объекта 6, так же на второй и третий входы данного блока передаются значения S - ширина подвижного объекта и D - длина подвижного объекта соответственно. В блоке расчета вероятности обнаружения подвижного объекта 6 по формуле (5) осуществляется расчет Роб - вероятности обнаружения подвижного объекта.
Таким образом, благодаря введению новых блоков и связей достигается требуемый технический результат - расширение функциональных возможностей за счет моделирования процесса обнаружения космическим аппаратом подвижного объекта.
Источники информации
1. Патент на изобретение RU №2214624, кл.7 G06F 17/00.
2. Авторское свидетельство СССР №1809436, кл. G06F 7/4, 1991
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования процесса обнаружения подвижного объекта | 2019 |
|
RU2701077C1 |
| Устройство и способ для обнаружения оптических дефектов деталей конструкционной оптики | 2021 |
|
RU2789204C1 |
| СПОСОБ СКРЫТИЯ МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2006 |
|
RU2312297C1 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| СПОСОБ ЗОНДИРОВАНИЯ СЕЙСМООРБИТАЛЬНЫХ ЭФФЕКТОВ И ВАРИАЦИЙ ПЛОТНОСТИ ВЕРХНЕЙ АТМОСФЕРЫ | 2019 |
|
RU2705161C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2729339C1 |
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ ЗЕМЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814305C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА "ГАСАД" | 1993 |
|
RU2033949C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ОРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА С ИНЕРЦИОННЫМИ ИСПОЛНИТЕЛЬНЫМИ ОРГАНАМИ ПРИ ЗОНДИРОВАНИИ АТМОСФЕРЫ ЗЕМЛИ | 2006 |
|
RU2325310C2 |
Устройство для моделирования процесса обнаружения подвижного объекта относится к автоматике и вычислительной технике и может быть использовано в специализированных устройствах вычислительной техники для моделирования процесса обнаружения космическим аппаратом (КА) подвижного объекта. Техническим результатом является расширение функциональных возможностей достигается за счет обеспечения моделирования процесса обнаружения космическим аппаратом подвижного объекта. Устройство содержит блок хранения векторов, блок расчета сферического линейного расстояния на местности, блок расчета высоты орбиты космического аппарата, блок расчета угла отклонения проецирующего луча от местной вертикали, блок расчета предельного линейного разрешения и блок расчета вероятности обнаружения подвижного объекта. 1 ил.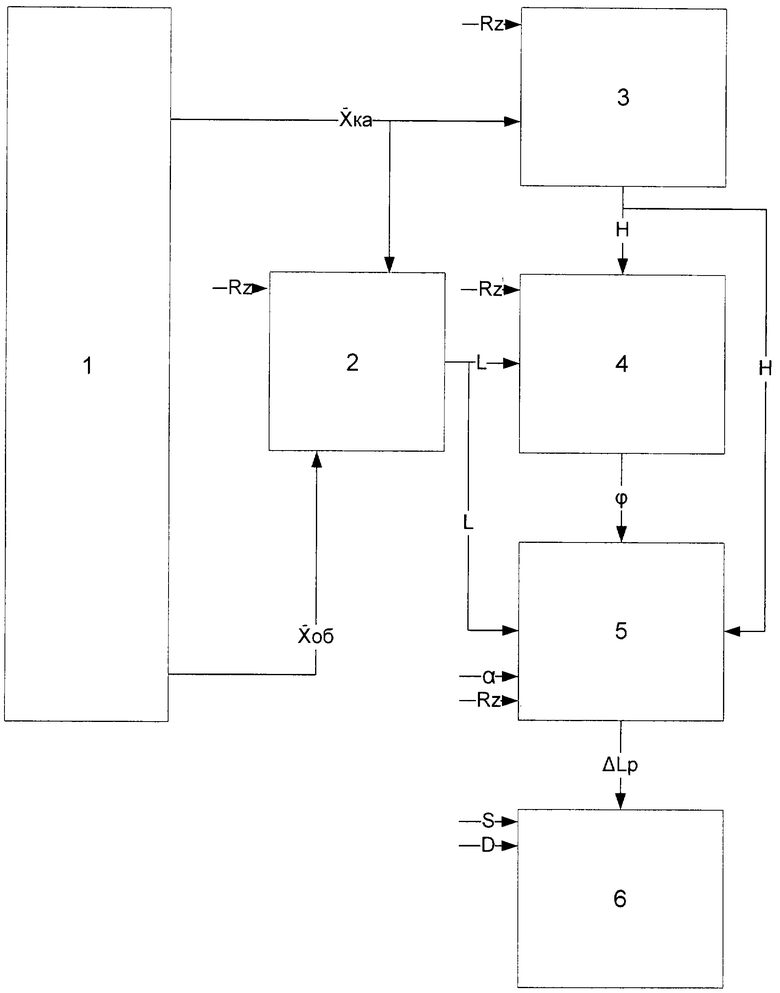
Устройство для моделирования процесса обнаружения подвижного объекта, содержащее блок хранения векторов, отличающееся тем, что в него дополнительно введены блок расчета сферического линейного расстояния на местности, блок расчета высоты орбиты космического аппарата (КА), блок расчета угла отклонения проецирующего луча от местной вертикали, блок расчета предельного линейного разрешения и блок расчета вероятности обнаружения подвижного объекта, при этом первый выход блока хранения векторов соединен с первым входом блока расчета сферического линейного расстояния на местности и вторым входом блока расчета высоты орбиты КА, а второй выход блока хранения векторов соединен с третьим входом блока расчета сферического линейного расстояния на местности, выход блока расчета высоты орбиты КА соединен с первым входом блока расчета угла отклонения проецирующего луча от местной вертикали и пятым входом блока расчета предельного линейного разрешения, выход блока расчета сферического линейного расстояния на местности соединен с третьим входом блока расчета угла отклонения проецирующего луча от местной вертикали и вторым входом блока расчета предельного линейного разрешения, выход блока расчета угла отклонения проецирующего луча от местной вертикали соединен с первым входом блока расчета предельного линейного разрешения, выход которого соединен с первым входом блока расчета вероятности обнаружения подвижного объекта, причем на второй вход расчета сферического линейного расстояния на местности и первый вход блока расчета высоты орбиты КА, а также второй вход блока расчета угла отклонения проецирующего луча от местной вертикали и четвертый вход блока расчета предельного линейного разрешения подано значение Rz - радиуса Земли, а на второй и третий вход блока расчета вероятности обнаружения подвижного объекта подаются значения S - ширины подвижного объекта, и D - длины подвижного объекта, соответственно, а также на третий вход блока расчета предельного линейного разрешения подано значение α - половина угла мгновенного поля зрения аппаратуры разведки установленной на КА.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2258239C2 |
| КОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЗА ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2284550C2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПРИНЯТИЯ РЕШЕНИЙ | 2002 |
|
RU2214624C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| РАДИОПЕЛЕНГАЦИОННАЯ СИСТЕМА ДЛЯ ПОИСКА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2264937C1 |
| Устройство для сравнения и сортировки чисел | 1991 |
|
SU1809436A1 |
| JP 2006146807 А, 08.06.2006 | |||
| US 4199874 A, 29.04.1980. | |||

