Настоящее изобретение относится к способу и системе для предупреждения оператора подвижного объекта о проникновении подвижного объекта, по меньшей мере, на временно запрещенный для использования участок транспортного пути.
Транспортные пути, например шоссе, железные дороги, пути водного транспорта и летные полосы аэродромов, для подвижных объектов, например легковых автомобилей, грузовиков, поездов, кораблей и воздушных судов, как правило, свободно пересекать нельзя. Для управления движением на этих транспортных путях подают оптические и/или акустические сигналы оператору или операторам, которые, руководствуясь своим опытом и/или образованием, рассматривают их в качестве команд на остановку или движение. Так, например, устройства для оптического генерирования сигналов, типа светофоров, проблесковых маячков и предупреждающих знаков в виде косого креста, устанавливают, как правило, в непосредственной близости от временно запрещенных для использования участков, например перекрестков дорог, перекрестных стрелочных переводов, зон пересечения взлетно-посадочных полос, что позволяет оператору при нормальном способе езды в случае поступления информации о необходимости остановки своевременно остановиться перед временно запрещенным для использования участком.
Однако нередко случается так, что, прежде всего по причине ошибочных действий человека, объект проникает на такой временно запрещенный для использования участок, создавая опасные условия для человека и материалов, хотя все сигнальные устройства и выдали информацию о необходимости остановки. Для предотвращения происшествий такого рода современные системы обеспечения безопасности движения поездов имеют, например, программы принудительного торможения, которые начинают принудительное торможение поезда, если машинист не отреагировал на информацию о необходимости остановки, т.е., например, проехал на красный свет железнодорожного светофора.
Аналогичные программы, однако, в дорожном движении, судоходстве и воздушном сообщении совершенно отсутствуют. В воздушном сообщении авиадиспетчер все же может при наличии визуального контакта с воздушным или наземным подвижным средством или радаром принять решительные меры по определению местоположения, если, например, воздушное или наземное подвижное средство несанкционированно въезжает в пределы взлетно-посадочной полосы. Соответствующие датчики на стоп-линиях могут даже сообщить о въезде на командно-диспетчерский пункт. Однако если в этот момент отсутствует прямая радиосвязь с пилотом, потому что, например, авиадиспетчер на командно-диспетчерском пункте и пилот настроились на совершенно разные каналы, то и в данном случае предупреждение уже невозможно. Однако для всех указанных подвижных объектов часто свойственно то, что они имеют одно или несколько радиоэлектрических приемных устройств (например, радиоприемник, радиоузел).
Поэтому в основе настоящего изобретения лежит задача разработки способа и системы, с помощью которых можно более надежно предотвращать проникновение подвижного объекта на временно запрещенный для использования участок транспортного пути путем непосредственного предупреждения оператора подвижного объекта.
Эта задача, что касается способа, в соответствии с изобретением решается способом предупреждения оператора подвижного объекта от проникновения подвижного объекта, по меньшей мере, на временно запрещенный для использования участок транспортного пути, при котором:
a) активируется заранее установленная граница временно запрещенного для использования участка;
b) определяется местоположение подвижного объекта относительно этой границы;
c) удаленность подвижного объекта от границы сравнивается с заранее установленной ее предельно допустимой величиной таким образом, что можно определить, нарушена ли активированная граница подвижным объектом; и
d) при нарушении границы и одновременно активированной границе активируется передающее устройство, которое передает настроенные на приемное устройство подвижного объекта предупреждающие сигналы для обработки их на объекте для оператора, причем
e) приемное средство подвижного объекта поддерживает много заранее установленных каналов радиосвязи, а передающее устройство передает свои предупреждающие сигналы по всем этим заранее установленным каналам радиосвязи.
Что касается системы, эта задача решается согласно изобретению с помощью системы предупреждения оператора подвижного объекта о проникновении подвижного объекта, по меньшей мере, на временно запрещенный для использования участок транспортного пути, включающей в себя:
a) активируемую заранее установленную границу временно запрещенного для использования участка;
b) средство для определения местоположения подвижного объекта относительно этой границы;
c) средство для относительного сравнения удаленности подвижного объекта от границы с заранее установленной ее предельно допустимой величиной для определения, нарушается ли активированная граница подвижным объектом;
d) активируемое передающее устройство и установленное на подвижном объекте приемное устройство, причем с нарушением активированной границы при одновременном активировании границы активируется передающее устройство, чтобы передать приемному устройству подвижного объекта согласованные предупреждающие сигналы, и причем приемное устройство подвижного объекта поддерживает много заранее определенных каналов радиосвязи, а передающее устройство передает свои предупреждающие сигналы по всем этим заранее определенным каналам радиосвязи; и
e) на объекте предусмотрены средства для акустической и/или оптической передачи предупреждающих сигналов для оператора.
Таким способом можно выявлять проникновение подвижного объекта на временно запрещенный для использования участок и на основании одновременности нарушения границы в виде этого проникновения и активирования границы посылать рассчитанные на принимающие возможности оператора, предупреждающие сигналы. Имеющая к этому отношение логическая система может отобразить эти два события, например, в смысловом отношении с помощью логической операции И. Возможность воздействия на оператора реализуется при этом локально без возможно требующего затрат времени обходного пути через центральную систему управления. Для разъяснения этого решения следует также отметить, что в качестве средств для определения удаленности местоположения подвижного объекта может быть использован также один-единственный, относящийся к границе детектор, который срабатывает, когда объект оказывается у границы или на границе. Местоположение подвижного объекта контролируется, поэтому, в данном случае только бинарно, т.е. или «Объект у границы или на границе», или «Никакого объекта у границы или на границе нет». Особую надежность способу и системе придает то, что приемное устройство подвижного объекта поддерживает много заранее установленных каналов радиосвязи, а передающее устройство свои предупреждающие сигналы передает по всем этим заранее определенным каналам радиосвязи. Благодаря этому, например, экипаж в кабине воздушного или наземного транспортного средства получит эти предупреждающие сигналы в любом случае, поскольку согласно правилам всегда готов к приему, по меньшей мере, один из этих заранее установленных каналов радиосвязи. При этом по причине небольшого, имеющегося в распоряжении количества времени для предупреждения особенно целесообразно, чтобы передающее устройство передавало предупреждающие сигналы предпочтительно одновременно по всем этим заранее определенным каналам радиосвязи.
Обычно в качестве заранее определенной границы может выступать, по меньшей мере, один световой сигнал, который в случае его активирования светится для сообщения команды на остановку и при этом потребляет электрическую энергию, поток которой детектируется для выявления активированного состояния. Следовательно, выполняется вышеупомянутая логическая операция И, если, таким образом, детектируется течение электрического тока, вызывающего свечение светового сигнала, и удаленность подвижного объекта от границы становится меньше ее критического значения. С учетом вышеприведенного примера всего лишь с одним детектором, критическое значение удаленности со времени срабатывания детектора считается пройденным.
Предпочтительно местоположение подвижного объекта можно определять, по меньшей мере, с помощью одного установленного на транспортном пути подвижного объекта датчиком. Для этого пригодны в качестве датчика, например, петли индуктивности, емкостные датчики, приемники сигналов РЛС, датчики давления, устройства гиперболического позиционирования и другие аналогичные устройства.
Для повышения точности информации о местоположении подвижного объекта и о приближении его к границе можно определять направление движения подвижного объекта с помощью, по меньшей мере, двух датчиков.
В качестве альтернативы или дополнительно к вышеназванным датчикам для определения местоположения подвижного объекта местоположение подвижного объекта можно определять и с помощью установленных на подвижном объекте навигационных средств. Для такого способа определения местоположения особенно пригодны поддерживаемые спутниками системы, например GPS и Galileo (в стадии развертывания), установленные на подвижном объекте, модули которых сообщают текущее положение, например, системе управления. Там могут затем вычисляться необходимые для сопоставления с критическим значением удаления от границы данные.
Предпочтительный способ одновременной передачи предупреждающих сигналов может предусматривать создание такого количества заранее установленных каналов радиосвязи, которое является результатом сложения согласованных по времени функций с соответствующим целым кратным числом интервала между двумя соседними каналами радиосвязи, и модулирование с помощью модулятора содержательной части предупреждающего сигнала на все созданные таким образом каналы радиосвязи.
Для предупреждения по отношению к другим участникам движения помех со стороны, в данное время не предназначенных для них предупреждающих сигналов, передающее устройство может быть размещено в непосредственной близости от границы и его излучаемая мощность может быть установлена такой, чтобы только приемное устройство находящегося в области границы подвижного объекта, который и стал причиной передачи предупреждающего сигнала, переводилось в состояние, дающее ему возможность принимать еще предупреждающие сигналы.
Чтобы существующую систему обеспечения безопасности транспортного пути, типа светящихся полос или светосигнальных устройств, можно было без значительного переоборудования приспособить к новому, соответствующему изобретению способу/системе, особенно предпочтительно, если передающее устройство установлено на ассоциируемом с границей осветительном средстве и обеспечивается электрической энергией от питающего это осветительное средство напряжения. В качестве ассоциируемого с границей осветительного средства могут быть, например, отдельные осветительные средства сигнализации и идентификации летных полос, которые являются составной частью светового оборудования рулежных дорожек и площадок для обслуживания самолетов, соответствующей системы указателей на аэродроме.
Кроме того, для осуществления этой уменьшающей затраты концепции может быть предусмотрено активирование на передачу предупреждающих сигналов передающего устройства сигналом, смодулированным на питающее напряжение. Дополнительно или в качестве альтернативы передающее устройство посредством смодулированных на питающее напряжение сигналов или через сигнальный кабель может также осуществлять обратную передачу данных, например данных сообщения о состоянии.
Особенно в международном трансграничном сообщении существует повышенная и, как правило, даже вынужденная потребность в регламентированных сигналах и/или голосовых сообщениях. Предпочтительно предупреждающие сигналы включают в себя, поэтому, заранее предусмотренный предупреждающий текст. С целью обеспечения более гибкой адаптации к конкретным условиям, кроме того, заранее предусмотренный предупреждающий текст в отдельных случаях можно выбирать из некоторого количества заранее предусмотренных текстов.
Предпочтительные варианты осуществления изобретения приведены в последующих пунктах формулы изобретения.
Примеры вариантов осуществления настоящего изобретения подробнее рассматриваются с использованием чертежей, где
фиг.1 - схематическое изображение с частями от а) до с) перемещения воздушного или наземного транспортного средства по пересечению взлетно-посадочной полосы;
фиг.2 - схематическое изображение с частями а) и b) системы для предупреждения о запрещенном проникновении воздушного или наземного транспортного средства на пересечение взлетно-посадочной полосы согласно фиг.1;
фиг.3 - схематическое изображение сигнализирующей лампы взлетно-посадочной полосы со встроенным передающим устройством;
фиг.4 - первая схематическая конструкция передающего устройства согласно фиг.3 для передачи с АМ-модуляцией;
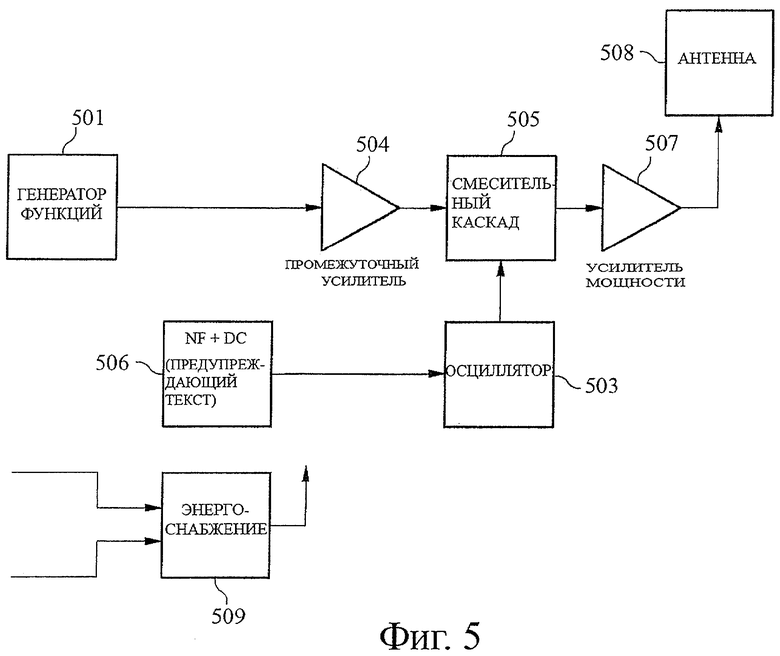
фиг.5 - вторая схематическая конструкция передающего устройства согласно фиг.3 для передачи с FM-модуляцией; и
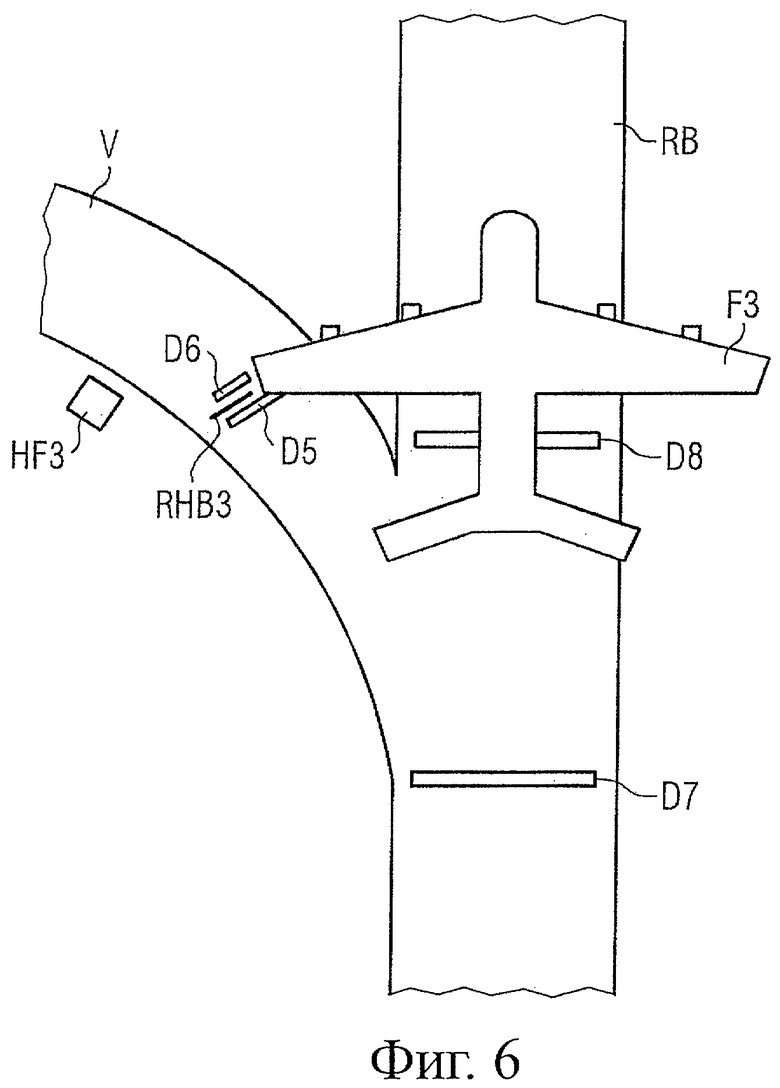
фиг.6 - схематический вид предполагаемой ситуации нарушения границы при перекрытии крылом самолета стоп-линии рулежной дорожки на ответвляющейся рулежной дорожке летного поля.
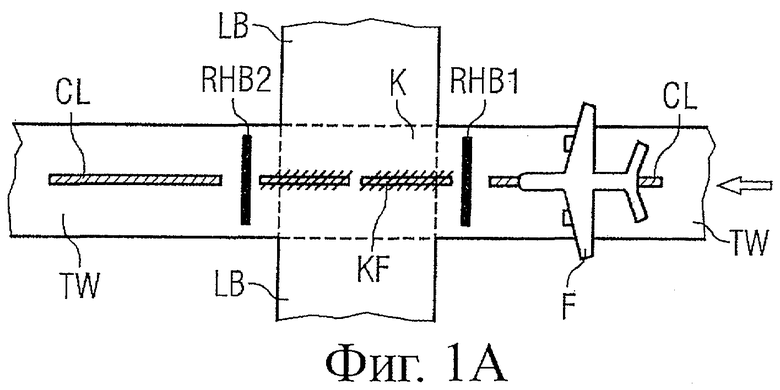
Фиг.1 показывает схематически участок летного поля аэродрома. Показанный участок является участком взлетно-посадочной полосы LB и рулежной дорожки TW, который в данный момент используется воздушным или наземным транспортным средством F. В средней области изображения находится пересечение К, которое в смысле настоящего изобретения считается временно запрещенным для использования участком транспортного пути, а именно взлетно-посадочной полосы LB. Это показано штрихпунктирным обрамлением пересечения К. Наряду с не отраженными на данном изображении другими огнями взлетно-посадочной полосы LB рулежная дорожка TW имеет центральную линию огней CL и включаемые с учетом направления огни KF пересечения ее с взлетно-посадочной полосой.
На фиг.1а воздушное или наземное транспортное средство F находится в состоянии готовности проехать на колесном ходу по пересечению К, на приведенном изображении справа налево. Пока мигают огни двух стоп-линий RHB1 и RHB2 рулежной дорожки слева и справа от взлетно-посадочной полосы LB, пересечение К пока еще закрыто, следовательно, временно запрещено для использования. Диагональные штрихи по линии огней пересечения KF символизируют, что огни KF пересечения в этот момент времени еще выключены.
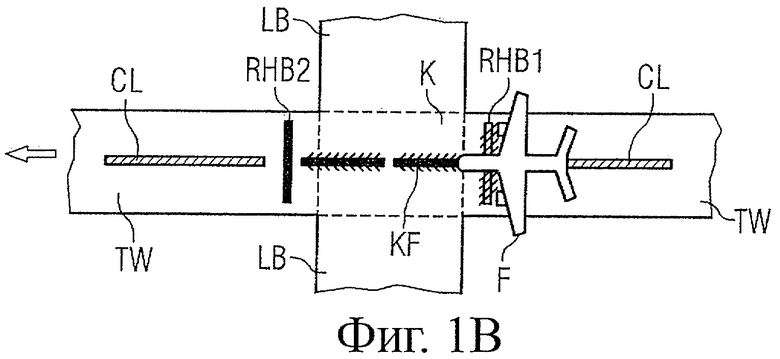
Фиг.1b показывает случай, когда пересечение К с точки зрения занятости взлетно-посадочной полосы LB может быть разрешено для использования. Для этого гаснет стоп-линия RHB1 (показано диагональными штрихами) и загораются огни пересечения KF в предусмотренном направлении движения воздушного или наземного транспортного средства F (показано стрелками на линии огней KF пересечения).
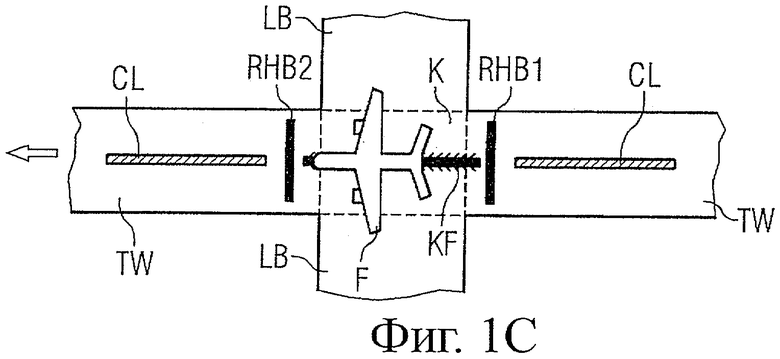
Как показано на фиг.1с, воздушное или наземное транспортное средство F уже почти проехало пересечение. Расположенная справа и уже пересеченная стоп-линия RHB1 рулежной дорожки снова загорается, чтобы просигнализировать возможно имеющемуся следующему воздушному или наземному транспортному средству, что пересечение К теперь после проезда воздушного или транспортного средства F пока временно запрещено для использования. Находящаяся слева стоп-линия RHB2 рулежной дорожки мигает во время всего процесса, так как воздушное или наземное транспортное средство F в рассматриваемом варианте осуществления перемещается с правой стороны взлетно-посадочной полосы LB через взлетно-посадочную полосу LB на левую сторону, а не наоборот. Когда воздушное или наземное транспортное средство F проедет затем и левую стоп-линию RHB2 рулежной дорожки, погаснут и огни KF пересечения. После этого остаются светящимися непрерывные огни взлетно-посадочной полосы LB.
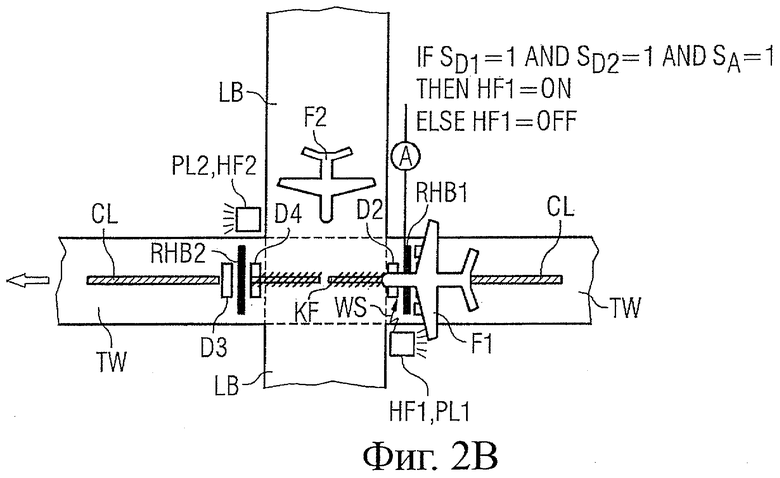
Фигура 2 а и b показывает в свою очередь в схематическом виде устройство соответствующей изобретению системы и принцип действия соответствующего изобретению способа. В рассматриваемом случае первое воздушное или наземное транспортное средство F1 хотело бы проехать по рулежной дорожке TW на приведенном изображении справа налево и должно при этом пересечь взлетно-посадочную полосу LB и соответственно пересечение К. Однако второе воздушное или наземное транспортное средство F2 в это время использует взлетно-посадочную полосу LB (использование взлетно-посадочной полосы LB, как правило, зарезервировано для воздушного или наземного транспортного средства F2 уже тогда, когда оно еще заходит на посадку на взлетно-посадочную полосу LB). По этой причине ограниченное пунктирной линией пересечение К в это время временно запрещено для перемещения обслуживающих транспортных средств на рулежных дорожках TW. По этой причине мигает также стоп-линия RHB1 рулежной дорожки, а огни KF пересечения выключены (обозначено диагональной штриховкой). Стоп-линия RHB1 рулежной дорожки представляет собой на применяемом в последующих пунктах формулы изобретения лексиконе активируемую границу (в данном случае она фактически активирована, поскольку мигает) для временно запрещенного к использованию пересечения К. В направлении движения первого воздушного или наземного транспортного средства F1 впереди и позади стоп-линии RHB1 рулежной дорожки установлены соответственно детектор D1 и детектор D2 для определения местоположения. Эти детекторы D1 и D2 посылают только один сигнал SD1=1 или SD2=1, когда непосредственно над ними находится соответствующая часть воздушного или наземного транспортного средства, например носовая часть воздушного или наземного транспортного средства. В электрическую цепь стоп-линии RHB1 рулежной дорожки включен амперметр А для измерения протекающего при активировании стоп-линии RHB1 рулежной дорожки тока осветительной нагрузки. В качестве альтернативы можно было бы вместо амперметра А установить только лишь измерительный датчик для детектирования только лишь наличия этого тока осветительной нагрузки. Амперметр А посылает сигнал SA=1 только лишь при протекании тока осветительной нагрузки. Непосредственно около рулежной дорожки TWY у пересечения К находится сигнализирующая лампа PL взлетно-посадочной полосы. В эту сигнализирующую лампу HPL взлетно-посадочной полосы встроен передатчик HF1, который в случае его активирования передает неоднократно в качестве предупреждающего сигнала WS одновременно по всем применяемым в районе аэродрома каналам радиосвязи радиограмму «Рулежная дорожка TWY, пересечена стоп-линия» до тех пор, пока не будет условия для активирования передатчика HF или передатчик не будет намеренно выключен другим способом.
Условие активирования этого передатчика HF1 на фиг.2b показано как наглядно, так и логически. В показанном примере осуществления изобретения первое воздушное или наземное транспортное средство F1 из-за невнимательности управляющего им оператора пересекло активированную стоп-линию RHB1 рулежной дорожки. Поэтому первое воздушное или наземное транспортное средство регистрируется теперь и детектором D2. В результате сигналы SD1, SD2 обоих детекторов D1 и D2 и сигнал SA амперметра А находятся теперь на логической «1». Логическая операция И этих сигналов приводит также к логической «1» и в результате активирует передатчик HF1, который получает свой сигнал на передачу в виде модулированного на электропитание сигнализирующего осветительного устройства взлетно-посадочной полосы PL1 пускового сигнала. Поскольку передатчик HF1 установлен в непосредственной близости от проникающего в запрещенную для использования область первого воздушного или наземного транспортного средства F1, его излучаемая мощность может быть установлена такой, чтобы предупреждающие сигналы WS могло принимать только установленное на первом воздушном или наземном транспортном средстве F1 приемное устройство. Поскольку на приемном устройстве всегда активирован, по меньшей мере, один из каналов радиосвязи, экипаж кабины первого воздушного или наземного транспортного средства F1 в любом случае получит эту так называемую радиограмму. Благодаря этому первое воздушное или наземное транспортное средство F1 может быть незамедлительно остановлено экипажем кабины, что исключит в последний момент непосредственную опасность причинения большого ущерба людям и материалам.
Таким способом можно с помощью сравнительно небольших средств исключить источник большой опасности, который, несмотря на высокий уровень квалификации находящегося в кабине персонала, раз от разу возникает по причине ошибочных действий человека. Если учесть при этом очень часто уже существующие детекторы D1 и D2, а также имеющиеся сигнализирующие осветительные устройства PL взлетно-посадочных полос и обязательные по регламенту стоп-линии RHB1 рулежных дорожек, нужна лишь логическая ИС (информационная система), которая логической операцией И соединяет сигналы детекторов Dl, D2 и сигнал, который указывает на наличие тока осветительной нагрузки стоп-линии RHB1 рулежной дорожки, и посылает посредством питающего напряжения осветительного устройства PL1 сигнализации взлетно-посадочной полосы соответствующий пусковой сигнал, чтобы активировать установленный на осветительном устройстве PL1 сигнализации взлетно-посадочной полосы передатчик HF1.
Оборудованное таким способом осветительное устройство сигнализации взлетно-посадочной полосы показано на фиг.3. Хорошо видно, что используемый там передатчик HF установлен прямо под откидной крышкой GA корпуса внутри осветительного устройства PL сигнализации взлетно-посадочной полосы и получает питание вместе с осветительным устройством PL сигнализации взлетно-посадочной полосы от питающего напряжения PS этого устройства. Передатчик HF, кроме того, может быть подключен к не изображенному здесь обслуживающему модулю, который имеет режим ведения меню и позволяет, например, выбирать передаваемый предупреждающий текст из набора текстов. Таким способом также можно выбирать мощность передачи и в случае необходимости каналы передачи или способ передачи, например AM или FM.
Следующие далее фиг.4 и 5 показывают, в свою очередь, устройство передатчика HF в деталях и объясняют генерирование посылаемого по установленным каналам радиосвязи предупреждающего сигнала WS.
Применительно к амплитудной модуляции AM фигура 4 показывает схематическое изображение передающего устройства 400 для передачи предупреждающего сигнала WS. Описанная функция, состоящая из суммы гармонических во времени сигналов в канальном интервале выбранной полосы радиочастот, генерируется в виде электрического сигнала в генераторе функций 401. Этот сигнал модулируется в множительном устройстве 402 теперь уже речевым сигналом, который соответствует записанному в память предупреждающему тексту, и дополнительным постоянным напряжением 406. (Сами предупреждающие тексты могут наговариваться через микрофон и/или записываться в память. Можно также выбирать из нескольких текстов соответствующий ситуации текст.)
Продукт усиливается и фильтруется в промежуточном усилителе 404. Осциллятор 403 вырабатывает гармонический во времени сигнал с частотой, находящейся в середине выбранной полосы радиочастот. Этот сигнал множится вместе с поступающим из промежуточного усилителя 404 сигналом с помощью смесительного каскада 405. В результате возникают требующиеся модулированные по амплитуде радиосигналы на всех каналах в нужной полосе радиочастот. Эти радиосигналы в регулируемом или программируемом линейном блоке 407 усиления мощности усиливаются широкополосно и передаются через локальную антенну 408. Локальной антенне 408 может быть при этом подчинена не показанным здесь способом еще и с сигналотехнической точки зрения направленная назад контрольная антенна, которая при передаче предупреждающих сигналов WS проверяет, с каким уровнем передаются эти предупреждающие сигналы WS. Полностью отсутствующий или слишком слабый, а также слишком сильный уровень сигнала может при этом привести к соответствующим проверочным и/или регулировочным операциям. Устройство управления 409 оценивает управляющие сигналы и в аварийной ситуации обеспечивает соответственно передающее устройство 400 рабочим напряжением, поэтому автоматически начинается запрограммированное тестирование, произносимое на выбранных каналах радиосвязи.
Применительно к модуляции FM по частоте фиг.5 показывает схематическое изображение передающего устройства 500 для передачи предупреждающих сигналов WS. Описанная функция, состоящая из суммы гармонических во времени сигналов, в интервале между каналами генерируется в виде электрического сигнала в промежуточном генераторе 501 функций. Эти сигналы усиливаются и фильтруются в промежуточном усилителе 504. Осциллятор 503 генерирует гармонический во времени сигнал с частотой в середине выбранной полосы радиочастот. Эта несущая одновременно с речевым сигналом, который соответствует записанному в память предупреждающему тексту и генерируется генератором 506 полезных сигналов (предупреждающие тексты могут и в этом случае наговариваться через микрофон и/или записываться в память), модулируется по частоте или по фазе. Этот сигнал с помощью смесительного каскада 505 теперь умножается вместе с выработанным в промежуточном усилителе 504 сигналом. В результате возникают необходимые модулированные по частоте или фазе радиосигналы на всех каналах в выбранном диапазоне радиочастот. Эти радиосигналы в регулируемом или программируемом линейном блоке 507 усиления мощности широкополосно усиливаются, полосно ограничиваются и передаются через локальную антенну 508 (наличие контрольной антенны возможно и здесь). Устройство 509 управления оценивает управляющие сигналы и в аварийной ситуации обеспечивает соответствующее устройство рабочим напряжением, поэтому автоматически начинается посылка программированного речевого теста.
Поскольку при этих применениях речь идет, как правило, о радиотелефонии и фаза не соответствует уху человека, фазу каждого колебания по закону косинуса по усмотрению можно применять любую. Благодаря этому форма сигнала изменяется полностью до такой степени в лучшую сторону, что амплитуда значительно уменьшается, что приводит к улучшению отношения сигнал/шум. Можно применять, например, квадратичную функцию фазы:
U(t)=U0 Σcos(k·2nft+k2·2nt/N), где
U(t) - динамика напряжения в зависимости от времени t;
U0 - основная амплитуда;
k - номер канала;
f - частота; и
N - количество каналов.
Теперь следует отметить, что могут использоваться и генерироваться также все другие применяемые непрерывные и цифровые виды модуляции. Рассмотренный здесь вариант осуществления изобретения также ни в коем случае не должен создавать мнение, что объем настоящего изобретения можно было бы ограничить воздушным сообщением. Наоборот, изобретение может быть применено везде, где должно ограничиваться проникновение подвижного объекта на временно запрещенный для использования участок транспортного пути таким образом, что передаются соответствующие возможностям приема предупреждения, которые могут восприниматься оператором подвижного объекта. Благодаря этому оператор оказывается в состоянии предотвратить несанкционированное/нежелательное проникновение управляемого им подвижного объекта на запрещенный для использования участок.
Другой особый случай предпочтительного осуществления изобретения отображен на фиг.6. Фиг.6 показывает при этом схематически вид на предполагаемую ситуацию нарушения границы при перекрытии крылом стоп-линии RHB3 рулежной дорожки на ответвляющейся рулежной дорожке V. Ответвляющаяся рулежная дорожка V отходит при этом от рулежной дорожки RB. Стоп-линия RHB3 рулежной дорожки предназначена в данном случае для временного блокирования проникновения самолета F3 на расположенные за ней области рулежной дорожки RB или взлетно-посадочной полосы. С момента зажигания огней стоп-линии RHB3 рулежной дорожки начинается наблюдение за относящимися к ней детекторами D5 и D6, которые в случае приведения их в действие вызывают передачу предупредительных сигналов WS.
В данном случае, однако, не происходит серьезного нарушения границы, поскольку всего лишь самолет F3 своим левым большим крылом проходит над детекторами D5 и D6, но сам по существу находится на рулежной дорожке RB (сходная проблема в настоящее время снова может возникать, например, на многих аэродромах, принимающих аэробусы А380). В этом случае реагировали, однако, и относящиеся к рулежной дорожке RB детекторы D7 и D8, что позволяет с уверенностью констатировать, что самолет F3 движется по рулежной дорожке RB, а не свернул на ответвление V. Соответствующая логическая схема распознает эту ситуацию на основании сигналов детекторов D7 и D8 и предотвращает на этот раз на основании этого передачу предупреждающих сигналов WS относящимся к стоп-линии RHB3 рулежной дорожки передатчиком HF3. Таким образом, изложен способ, который исключает ненужную рассылку предупредительных сигналов WS в случае перекрытия крылом (как показано на фиг.6) или воздействия транспортным движением на соседних транспортных путях.


Изобретение относится к транспортной технике. Способ предупреждения оператора подвижного объекта о проникновении подвижного объекта на временно запрещенный для использования участок транспортного пути заключается в определении местоположения подвижного объекта относительно заранее активированной границы временно запрещенного для использования участка пути. В случае установления нарушения активированной границы, выявленного путем сравнения с заранее установленной предельно допустимой величиной, активируется передающее устройство, которое передает предупреждающие сигналы для обработки их на подвижном объекте. Причем приемное средство подвижного объекта поддерживает несколько заранее предусмотренных каналов радиосвязи, а передающее устройство передает предупреждающие сигналы по всем заранее определенным каналам радиосвязи. Система, реализующая данный способ, содержит активируемую заранее границу временно запрещенного для использования участка, средство для определения местоположения подвижного объекта относительно этой границы. Система содержит средство для сравнения удаленности подвижного объекта от границы с заранее установленной предельно допустимой величиной, передающее устройство, которое передает предупреждающие сигналы, приемное средство подвижного объекта, которое поддерживает несколько заранее предусмотренных каналов радиосвязи, и средства для акустической и/или оптической передачи предупреждающих сигналов. Изобретение обеспечивает надежное предотвращение проникновения подвижного объекта на временно запрещенный для использования участок транспортного пути. 2 н. и 22 з.п. ф-лы, 6 ил.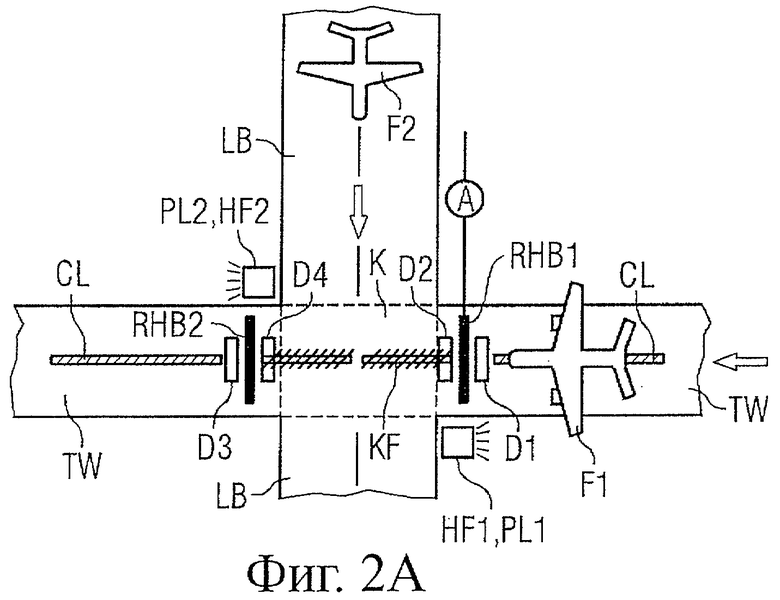
1. Способ предупреждения оператора подвижного объекта (F1, F2, F3) о проникновении подвижного объекта (F1, F2, F3), по меньшей мере, на временно запрещенный для использования участок (К) транспортного пути (LB), при котором:
a) активируется заранее установленная граница (RHB1, RHB2) временно запрещенного для использования участка (К);
b) определяется местоположение подвижного объекта (F1 F2, F3) относительно этой границы (RHB1, RHB2);
c) удаленность подвижного объекта (F1 F2, F3) от границы (RHB1, RHB2) сравнивается с заранее установленной предельно допустимой величиной таким образом, что можно определить, нарушается ли активированная граница (RHB1, RHB2) подвижным объектом (F1 F2, F3); и
d) при нарушении границы и одновременно активированной границе (RHB1, RHB2) активируется передающее устройство (HF), которое передает настроенные на приемное устройство подвижного объекта (F1 F2, F3) предупреждающие сигналы (WS) для обработки их на объекте для оператора, причем
e) приемное средство подвижного объекта (F1 F2, F3) поддерживает много заранее предусмотренных каналов радиосвязи, а передающее устройство передает свои предупреждающие сигналы (WS) по всем этим заранее определенным каналам радиосвязи.
2. Способ по п.1, отличающийся тем, что заранее установленной границей (RHB1, RHB2) является, по меньшей мере, один световой сигнал, который в случае его активирования светится и при этом потребляет электрическую энергию, поток которой детектируется для выявления активированного состояния.
3. Способ по п.1 или 2, отличающийся тем, что местоположение подвижного объекта (F1, F2, F3) определяется, по меньшей мере, одним установленным на транспортном пути (TW) подвижного объекта (F1, F2, F3) датчиком (D1, D2).
4. Способ по п.3, отличающийся тем, что направление движения подвижного объекта (F1 F2, F3) определяется с помощью, по меньшей мере, двух датчиков (Dl, D2).
5. Способ по п.1 или 2, отличающийся тем, что местоположение подвижного объекта определяется с помощью установленных на подвижном объекте навигационных средств.
6. Способ по п.1, отличающийся тем, что для одновременной передачи предупреждающих сигналов (WS) количество заранее установленных каналов радиосвязи создается путем суммирования гармонических во времени функций cos(2knft) или sin(2knft) с соответствующим целым кратным n интервала 2nf двух соседних каналов радиосвязи, и содержательная часть предупреждающего сигнала (WS) с помощью модулятора модулируется на все созданные таким образом каналы радиосвязи.
7. Способ по п.1, отличающийся тем, что передающее устройство (HF1, HF2) установлено непосредственно вблизи границы (RHB1, RHB2) и его мощность передачи установлена такой, что только принимающее устройство находящегося в области границы подвижного объекта (F1, F2, F3) оказывается в состоянии принимать еще предупреждающие сигналы (WS).
8. Способ по п.1, отличающийся тем, что передающее устройство (HF, HF1, HF2) установлено на ассоциированном с границей (RHB1, RHB2) осветительном средстве (PL, PL1, PL2) и/или регулирующем движение знаке, и через их питающее напряжение (PS) обеспечивается электропитанием.
9. Способ по п.8, отличающийся тем, что передающее устройство (HF, HF1, HF2) активируется на передачу предупреждающих сигналов (WS) смодулированным на питающее напряжение сигналом, и/или передающее устройство посредством смодулированных на питающее напряжение (WS) сигналов передает в обратном направлении данные, в частности данные о состоянии.
10. Способ по п.1, отличающийся тем, что предупреждающие сигналы (WS) включают в себя заранее определенный предупреждающий текст.
11. Способ по п.10, отличающийся тем, что заранее определенный предупреждающий текст выбирают из некоторого количества заранее определенных текстов.
12. Способ по п.1, отличающийся тем, что предотвращается передача предупреждающих сигналов и при наличии всех признаков нарушения активированной границы (RHB3), если на основании сигналов других, чем детекторы (D5, D6) для активированной границы (RHB3), детекторов (D7, D8) выясняется, что подвижный объект (Р) не пересечет активированную границу (RHB3).
13. Система для предупреждения оператора подвижного объекта (F, F1, F2) о проникновении подвижного объекта (F, F1, F2), по меньшей мере, на временно запрещенный для использования участок (К) транспортного пути (LB, TW), включающая в себя:
a) активируемую заранее определенную границу (RHB1, RHB2) временно запрещенного для использования участка (К);
b) средство (от D1 до D4) для определения местоположения подвижного объекта (F1, F2, F3) относительно этой границы (RHB1, RHB2);
c) средство для относительного сравнения удаленности подвижного объекта (F1, F2, F3) от границы (RHB1, RHB2) с заранее установленной предельно допустимой ее величиной для определения, нарушается ли активированная граница (RHB1, RHB2) подвижным объектом (F1, F2, F3);
d) активируемое передающее устройство (HF, HF1, HF2) и установленное на подвижном объекте (F1, F2, F3) приемное устройство, причем при нарушении активированной границы (RHB1, RHB2) при одновременном активировании границы (RHB1, RHB2) активируется передающее устройство (HF, HF1, HF2), чтобы передать приемному устройству подвижного объекта (F1, F2, F3) согласованные предупреждающие сигналы (WS), и причем приемное устройство подвижного объекта (F1, F2, F3) поддерживает много заранее определенных каналов радиосвязи, а передающее устройство передает свои предупреждающие сигналы (WS) по всем этим заранее определенным каналам радиосвязи; и
e) имеющиеся на объекте средства для акустической и/или оптической передачи предупреждающих сигналов (WS) для оператора.
14. Система по п.13, отличающаяся тем, что заранее определенная граница (RHB1, RHB2) является, по меньшей мере, одним световым сигналом, который светится в случае его активирования и при этом потребляет электрическую энергию, поток которой детектируется для определения активированного состояния.
15. Система по п.13 или 14, отличающаяся тем, что местоположение подвижного объекта (F1, F2, F3) определяют с помощью, по меньшей мере, одного установленного на транспортном пути (TW) подвижного объекта (F1, F2, F3) датчика (от D1 до D4).
16. Система по п.15, отличающаяся тем, что направление движения подвижного объекта (F1, F2, РЗ) определяют с помощью, по меньшей мере, двух датчиков (D1, D2 или D3, D4).
17. Система по п.13 или 14, отличающаяся тем, что местоположение подвижного объекта определяют с помощью установленного на подвижном объекте навигационного средства.
18. Система по п.13, отличающаяся тем, что для одновременной передачи предупреждающих сигналов (WS) количество заранее установленных каналов радиосвязи создают путем суммирования гармонических во времени функций cos(2knft) или sin(2knft) с соответствующим целым кратным n интервала 2nf двух соседних каналов радиосвязи, и содержательная часть предупреждающего сигнала (WS) с помощью модулятора модулируется на все созданные таким образом каналы радиосвязи.
19. Система по п.13, отличающаяся тем, что передающее устройство (HF, HF1, HF2) установлено непосредственно вблизи границы (RHB1, RHB2) и его мощность передачи установлена такой, что только принимающее устройство находящегося в области границы (RHB1, RHB2) подвижного объекта (F1, F2, F3) оказывается в состоянии принимать еще предупреждающие сигналы (WS).
20. Система по п.13, отличающаяся тем, что передающее устройство установлено на ассоциированном с границей осветительном средстве (PL, PL1, PL2) и через его питающее напряжение (PL) обеспечивается электропитанием.
21. Система по п.20, отличающаяся тем, что передающее устройство (HF, HF1, HF2), активируется на передачу предупреждающих сигналов (WS) смодулированным на питающее напряжение (PS) сигналом, и/или передающее устройство (HF, HF1, HF2) посредством смодулированных на питающее напряжение (WS) сигналов передает в обратном направлении данные, в частности данные о состоянии.
22. Система по п.13, отличающаяся тем, что предупреждающие сигналы (WS) включают в себя заранее определенный предупреждающий текст.
23. Система по п.22, отличающаяся тем, что заранее определенный предупреждающий текст выбирают из некоторого количества заранее определенных предупреждающих текстов.
24. Система по п.13, отличающаяся тем, что в состав ее входят логические средства, которые предотвращают передачу предупреждающих сигналов (WS) и при наличии всех признаков нарушения активированной границы (RHB3), если на основании сигналов других, чем детекторы (D5, D6) для активированной границы (RHB3), детекторов (D7, D8) выясняется, что подвижный объект (F) не пересекает активированную границу (RHB3).
| RU 2160930 C1, 20.12.2000 | |||
| WO 03107299 A2, 24.12.2003 | |||
| WO 9531798 A1, 23.11.1995 | |||
| DE 20111678 U1, 29.11.2001 | |||
| RU 94005903 A1, 20.10.1995. |

