Настоящее изобретение относится к способу и устройству для содействия наземной навигации самолета в аэропорту.
Сложность некоторых аэропортов, увеличение объема воздушных перевозок и наличие оборудования, которое часто плохо подходит для все более крупных и более многочисленных самолетов, создают трудности для движения самолетов на взлетно-посадочных полосах и рулежных дорожках аэропортов и тем самым часто приводят к увеличению продолжительности руления, иногда к более или менее серьезным инцидентам и, к сожалению, также к происшествиям.
В связи с этим отмечается все большее число «вторжений на взлетно-посадочную полосу», то есть ситуаций, когда не получивший разрешения самолет проходит на взлетно-посадочную полосу, которая в этот самый момент времени используется в порядке очереди другим самолетом для посадки или взлета. Такое вторжение на взлетно-посадочную полосу является очень опасным, поскольку оно подвергает опасности жизнь пассажиров двух воздушных судов.
Поэтому по соображениям безопасности важно или, на самом деле, обязательно, чтобы каждый пилот был способен контролировать, по мере возможности эффективно, обстановку вокруг его самолета и в соответствующем случае был информирован о любом вторжении на взлетно-посадочную полосу (или о любой опасности вторжения).
В патентном документе ЕР-0980828 раскрыта система, которая транспортируется на борту самолета, предназначенная для помощи пилоту самолета во время маневров на земле. С этой целью такая система содержит первую телекамеру, которая формирует видеоизображения передней опоры шасси и зоны вокруг последней, вторую телекамеру, которая формирует видеоизображения основной опоры шасси и зон вокруг нее, и средство визуального наблюдения, которое установлено на панели контроля хода полета и на котором отображаются видеоизображения, формируемые указанными первой и второй телекамерами (которые прикреплены к фюзеляжу).
Эта известная система обеспечивает пилота лишь информацией, которая позволяет ему совершать с повышенной безопасностью маневры при рулении на земле. В частности, наблюдая опору шасси и зоны вокруг нее, он может предотвращать попадание шасси на препятствия на земле или выход со взлетно-посадочной полосы или рулежной дорожки, по которой самолет совершает пробег. Однако этой известной системой не предоставляется никакая информация относительно всей (или по меньшей мере относительно расширенной зоны) взлетно-посадочной полосы или рулежной дорожки. Далее, такая неполноценность информации может быть опасной, в частности, при плохой видимости (в тумане и т.д.). А именно, другое воздушное судно, в частности другой самолет, может находиться на той же самой взлетно-посадочной полосе (или той же самой рулежной дорожке) в один и тот же момент времени, и при неполноценности информации может случиться, что столкновение нельзя будет предотвратить, особенно в случае, если другое воздушное судно имеет очень высокую скорость, такую какая имеет место, например, при взлете или посадке самолета.
Кроме того, система визуального наблюдения, обеспечивающая частичное исключение вышеупомянутых недостатков, известна из статьи Beskenis, Green, Hyer and Johnson под названием «Integrated display system for low visibility landing and surface operations», опубликованной в «NASA Langley Technical Report», July 1998, NASA/CR-1998-208446. Эта система визуального наблюдения содержит, в частности, средство визуального наблюдения, делающее возможным представление на экране, установленном на панели контроля хода полета самолета, карты аэропорта с показом взлетно-посадочных полос, рулежных дорожек и различных сооружений, а также местоположения самолета и движения, которое существует в этом аэропорту.
Однако при контроле, осуществляемом с помощью такого просмотрового экрана, предполагается, что пилот бросает взгляд на указанный просмотровый экран очень часто и регулярно. Кроме того, даже при слежении за изображением на просмотровом экране ему трудно заблаговременно обнаруживать опасность вторжения на взлетно-посадочную полосу с помощью карты аэропорта, поскольку упрежденное местоположение самолета зависит от характеристик указанного самолета, таких как скорость или направление руления, которые трудно оценивать пилоту при обращении к такому просмотровому экрану.
Настоящее изобретение направлено на устранение этих недостатков. Оно относится к способу содействия наземной навигации самолета в аэропорту, который делает возможным информирование пилота о любой опасности вторжения самолета в запрещенную зону.
При этом согласно изобретению указанный способ примечателен тем, что при автоматическом и многократном осуществлении ряда последовательных этапов:
а) определяют текущие значения множества параметров указанного самолета;
b) с помощью указанных текущих значений определяют первое местоположение, соответствующее экстраполированному местоположению носа указанного самолета по прошествии особого временного интервала, начинающегося с текущего момента времени;
с) это первое местоположение сравнивают с по меньшей мере одной заранее заданной запрещенной зоной аэропорта; и
d) если указанное первое местоположение находится в указанной запрещенной зоне, выдают по меньшей мере один сигнал тревоги.
Таким образом, благодаря изобретению о любой опасности вторжения аэроплана в запрещенную зону (конкретизированную ниже) аэропорта, то есть о любом чрезмерном приближении к такой запрещенной зоне, извещается выдачей сигнала тревоги. Следовательно, пилот самолета всегда предупреждается о возникновении такой опасности вторжения на взлетно-посадочную полосу, и в таком случае он может привести в действие все соответствующие средства, необходимые для предотвращения любого нежелательного вторжения, что вносит значимый вклад в безопасность во время навигации в аэропорту.
Кроме того, путем многократного и автоматического осуществления способа согласно изобретению, который вследствие этого является постоянно реализуемым и не требующим никакого действия со стороны пилота, последний может сосредотачивать все свое внимание на других задачах, в частности на задачах пилотирования.
Согласно предпочтительному воплощению для определения указанного первого местоположения:
- учитывают заранее заданную опорную точку самолета;
- на этапе а) измеряют:
текущее местоположение указанной опорной точки;
текущую скорость указанной опорной точки;
текущее направление самолета (а именно, направление продольной оси самолета или направление согласно системе глобального позиционирования, конкретизированное ниже); и
текущую угловую скорость рыскания самолета; а
- на этапе b) последовательно:
с помощью текущего местоположения указанной опорной точки, текущего направления самолета и (заранее заданного) сдвига векторов носа самолета и указанной опорной точки определяют текущее местоположение носа самолета;
с помощью текущей скорости указанной опорной точки, текущей угловой скорости рыскания самолета и (заранее заданного) сдвига векторов носа самолета и указанной опорной точки определяют текущую скорость носа самолета; и
с помощью указанного текущего местоположения и текущей скорости носа самолета, таким образом определенных, а также указанного особого временного интервала определяют указанное первое местоположение, которое вследствие этого соответствует экстраполированному местоположению носа самолета по завершении указанного временного интервала.
Предпочтительно, чтобы указанная опорная точка соответствовала месту на самолете, где установлена приемная антенна спутниковой системы позиционирования, в частности системы глобального позиционирования (GPS).
Согласно конкретному воплощению на этапе с) указанное первое местоположение сравнивают со множеством заранее заданных запрещенных зон, которые совместно группируют в перечень запрещенных зон. В рамках настоящего изобретения указанный перечень запрещенных зон может содержать:
- по меньшей мере одну зону взлетно-посадочной полосы, которая соответствует поверхности аэропорта, заданную вокруг полосы для пробега и разбега указанного аэропорта, например взлетно-посадочной полосы, открытой только для посадок, рулежной дорожки или соединительной дорожки подхода; и/или
- по меньшей мере одну вспомогательную зону, которая соответствует поверхности аэропорта, заданную вокруг линии «стоп» указанного аэропорта.
Предполагается, что термин «линия стоп» означает поперечное покрытие краской рулежных дорожек на подходах к взлетно-посадочным полосам. Имеются линии «стоп» категории I (150 м от взлетно-посадочной полосы) и линии «стоп» категории III (90 м от взлетно-посадочной полосы). Когда при плохой видимости световую сигнализацию включают на уровне этой линии «стоп», она становится сигналом «стоп» (или световым стоп-сигналом). Пилот должен систематически делать кратковременные остановки вблизи линий «стоп» и требовать разрешения от диспетчерской службы воздушного движения на продолжение движения.
Согласно конкретному воплощению набор этапов b), c) и d) осуществляют только в случае, если текущая скорость опорной точки самолета больше, чем первая предельная скорость, и меньше, чем вторая предельная скорость.
Кроме того, предпочтительно, чтобы указанный особый временной интервал соответствовал:
- заранее заданному временному интервалу Т1, например 7 с, если текущая скорость Va опорной точки самолета больше третьей предельной скорости Vs3 или равна ей; и
- временному интервалу Т2, удовлетворяющему выражению T2=(Vs3·T1)/Va, если указанная текущая скорость Va меньше, чем указанная третья предельная скорость Vs3.
В рамках настоящего изобретения на этапе d) может выдаваться сигнал тревоги любого вида при обнаружении опасности вторжения в запрещенную зону, в частности звуковой сигнал тревоги и/или визуальный сигнал тревоги.
Согласно предпочтительному воплощению на этапе d) визуальный сигнал тревоги выдается на стандартный экран навигационных данных. В этом случае предпочтительно, чтобы указанный визуальный сигнал тревоги соответствовал:
- подсветке на экране навигационных данных соответствующей взлетно-посадочной полосы, если указанная запрещенная зона представляет собой зону взлетно-посадочной полосы; и/или
- текстовому сообщению, которое отображается на указанном экране навигационных данных.
В последнем случае предпочтительно, чтобы дисплейная зона указанного текстового сообщения зависела от режима отображения (например, азимутального кругового режима, представления в виде плана или режима дугообразного сектора), имеющегося на момент индикации на указанном экране навигационных данных.
Кроме того, предпочтительно, чтобы указанное текстовое сообщение содержало наименование соответствующей взлетно-посадочной полосы, если указанная запрещенная зона представляет собой зону взлетно-посадочной полосы, заданную вокруг взлетно-посадочной полосы, открытой только для посадок, чтобы это наименование содержало два атрибута, местоположение одного из которых относительно другого указывает на сторону взлетно-посадочной полосы, к которой подходит самолет, а эта сторона определялась с помощью ориентации вектора скорости носа и ориентации (которая заранее задается) указанной взлетно-посадочной полосы.
Настоящее изобретение также относится к устройству для содействия наземной навигации самолета в аэропорту.
Согласно изобретению указанное устройство примечательно тем, что оно содержит:
- набор источников информации для определения текущих значений множества параметров указанного самолета;
- вычислительное средство для определения с помощью указанных текущих значений первого местоположения, соответствующего экстраполированному местоположению носа указанного самолета по прошествии особого временного интервала, начинающегося с текущего момента времени;
- базу данных, содержащую по меньшей мере одну заранее заданную запрещенную зону аэропорта;
- средство сравнения для сравнения указанного первого местоположения с указанной, заранее заданной запрещенной зоной аэропорта; и
- средство тревожной сигнализации для выдачи по меньшей мере одного сигнала тревоги, если указанное первое местоположение находится в указанной запрещенной зоне, при этом указанное средство тревожной сигнализации содержит, в частности, экран устройства отображения информации в кабине экипажа, например типа индикатора навигационных данных или типа бортового информационного видеотерминала.
Фигурами приложенных чертежей четко поясняется, каким образом изобретение может быть осуществлено. На этих чертежах одинаковыми позициями обозначены аналогичные элементы.
На чертежах:
фигура 1 - структурная схема устройства согласно изобретению;
фигура 2 - схематический вид, иллюстрирующий способ определения согласно изобретению опасности вторжения на взлетно-посадочную полосу; и
фигура 3 - схематический вид, иллюстрирующий пример представления визуального сигнала тревоги.
Устройство 1 согласно изобретению, схематически представленное на фигуре 1, предназначено для помощи пилоту самолета А, например транспортного самолета, который частично изображен на фигуре 2, во время наземной навигации указанного самолета А в аэропорту. Точнее, указанное устройство 1 предназначено для информирования пилота о любой опасности вторжения самолета А в запрещенную зону Z1, конкретизированную ниже.
Согласно изобретению указанное устройство 1 содержит:
- набор 2 источников информации, конкретизированных ниже, предназначенных для определения текущих значений множества параметров указанного самолета А, также конкретизированных ниже;
- вычислительное средство 3 для определения с помощью указанных текущих значений, поставляемых указанным набором 2 источников информации, экстраполированного местоположения Р1 носа 4 самолета А (который применительно к этому местоположению на фигуре 2 изображен пунктирной линией). Это экстраполированное местоположение Р1 достигается по прошествии особого временного интервала (конкретизированного ниже), начинающегося в текущий момент времени при текущем местоположении Р0 носа 4 самолета А (который применительно к этому местоположению на фигуре 2 изображен сплошной линией);
- базу 5 данных, конкретизированную ниже, которая содержит по меньшей мере одну заранее определенную запрещенную зону Z1 аэропорта, по которому указанный самолет А перемещается;
- средство 6 сравнения, которое соединено с помощью линий 7 и 8 соответственно с указанным вычислительным средством 3 и указанной базой 5 данных, предназначенное для сравнения указанного экстраполированного местоположения Р1, получаемого из указанного вычислительного средства 3, с указанной запрещенной зоной Z1, получаемой из указанной базы 5 данных; и
- средство 9 тревожной сигнализации, которое соединено с помощью линии 10 с указанным средством 6 сравнения, для выдачи по меньшей мере одного сигнала тревоги, как только указанное экстраполированное местоположение Р1 перемещается внутрь указанной запрещенной зоны Z1.
Поэтому посредством устройства 1 согласно изобретению на любую опасность вторжения самолета А в запрещенную зону Z1 (конкретизированную ниже) аэропорта, то есть на любое чрезмерное приближение к запрещенной зоне Z1, указывается пилоту путем выдачи сигнала тревоги. Следовательно, пилот самолета А всегда оповещается во время возникновения такой опасности вторжения на взлетно-посадочную полосу, и поэтому он может привести в действие все соответствующие средства, необходимые для предотвращения любого нежелательного вторжения, в результате чего вносится значимый вклад в безопасность во время навигации в аэропорту.
Более того, указанное устройство 1 является автоматическим, и упомянутая выше обработка данных осуществляется многократно. Поэтому при использовании устройства 1 не требуется никакого действия со стороны пилота. И пилот может сосредоточить все свое внимание на других задачах, в частности на задачах пилотирования во время самолетовождения по аэропорту.
Указанный набор 2 источников информации содержит стандартное средство для определения параметров, используемых в вычислительном средстве 3, а именно:
- текущего местоположения Pr заранее заданной опорной точки 11 самолета А. Предпочтительно, чтобы указанная опорная точка 11 соответствовала месту на самолете А, где установлена стандартная приемная антенна 12 спутниковой системы позиционирования, в частности глобальной системы позиционирования (GPS). Поэтому, в этом случае, это местоположение определяют с помощью стандартного измерительного средства, которое также установлено на самолете А и которое связано с указанной приемной антенной 12;
- текущего направления самолета А, которое соответствует направлению продольной оси самолета А, которое измеряют стандартным средством, или направлению указанного самолета А, которое определяют с помощью указанной спутниковой системы позиционирования;
- текущей скорости указанной опорной точки 11, то есть скорости антенны 12 (нормы и направления) в примере из фигуры 2; и
- угловой скорости рыскания самолета А, которую измеряют с помощью стандартного средства.
С помощью набора 2 источников информации также можно определять значение сдвига векторов носа 4 самолета А и указанной опорной точки 11. Однако последняя информация также может быть объединена в одно целое непосредственно в вычислительном средстве 3.
Согласно изобретению указанное вычислительное средство 3, представленное на фигуре 1, содержит:
- вычислительный элемент 13, который соединен с помощью линий L1, L2 и L3 с указанным набором 2 источников информации и который выполнен с возможностью определять текущее местоположение Р0 носа 4 самолета А с помощью текущего местоположения Pr указанной опорной точки 11, текущего направления самолета А и сдвига векторов носа 4 самолета А и указанной опорной точки 11, получаемых соответственно с помощью указанных линий L1, L2 и L3;
- вычислительный элемент 14, который соединен с помощью линий L3, L4 и L5 с указанным набором 2 источников информации и который выполнен с возможностью определять текущую скорость носа 4 самолета А с помощью текущей скорости указанной опорной точки 11, текущей угловой скорости рыскания самолета А и указанного сдвига векторов носа 4 самолета А и указанной опорной точки, получаемых соответственно с помощью указанных линий L4, L5 и L3; и
- вычислительный элемент 15, который соединен с помощью линий 16 и 17 соответственно с указанными вычислительными элементами 13 и 14 и который образован с тем, чтобы определять с помощью указанного текущего местоположения и текущей скорости, получаемых от указанных вычислительных элементов 13 и 14, а также с помощью указанного особого временного интервала указанное местоположение Р1, которое вследствие этого соответствует экстраполированному местоположению носа 4 самолета А по завершении указанного временного интервала, если самолет А продолжает руление с текущими характеристиками руления (направлением и скоростью рыскания).
Согласно конкретному воплощению указанный особый временной интервал соответствует:
- заранее заданному временному интервалу Т1, например 7 с, если текущая скорость Va опорной точки (например, указанной опорной точки 11) самолета А больше, чем предельная скорость Vs3, или равна ей, например 0,2 узла (около 0,1 м/с); и
- временному интервалу Т2, удовлетворяющему выражению T2=(Vs3×T1)/Va, если указанная текущая скорость Va меньше, чем указанная предельная скорость Vs3.
Предшествующее сравнение и определение указанного особого временного интервала осуществляют с помощью указанного вычислительного средства 3.
В рамках настоящего изобретения также учитывают предельные скорости Vs1 и Vs2, которые являются такими, что:
- когда скорость самолета А ниже (или равна) этой предельной скорости Vs1, например 0,2 узла (около 0,1 м/с), в случае обнаружения опасности вторжения самолета А в запрещенную зону Z1 сигнал тревоги средством 9 тревожной сигнализации не выдается;
- когда скорость самолета А выше (или равна) этой предельной скорости Vs2, например 80 узлов (около 40 м/с), указанный самолет А больше не считается совершающим руление, и поэтому устройство 1 согласно изобретению больше не применяется.
В большинстве случаев каждый аэропорт содержит множество запрещенных зон Z1, все координаты которых объединяют в одно целое в базе 5 данных. В рамках настоящего изобретения запрещенная зона Z1 может соответствовать:
- зоне ZP взлетно-посадочной полосы, такой какая представлена на фигуре 2, которая соответствует поверхности аэропорта, которая задается вокруг полосы 18 для пробега и разбега (для которой также представлена центральная ось 18А), например вокруг взлетно-посадочной полосы, открытой только для посадок, рулежной дорожки или соединительной дорожки подхода; или
- вспомогательной зоне, не представленной, которая соответствует поверхности аэропорта, которая задается вокруг линии «стоп» указанного аэропорта. Предполагается, что линия «стоп» означает поперечное покрытие рулежных дорожек краской на подходах к взлетно-посадочным полосам. Имеются линии «стоп» категории I (150 м от взлетно-посадочной полосы) и линии «стоп» категории III (90 м от взлетно-посадочной полосы). Когда при плохой видимости световую сигнализацию включают на уровне этой линии «стоп», она становится сигналом «стоп» (или световым стоп-сигналом). Пилот должен систематически делать кратковременные остановки вблизи линий «стоп» и требовать разрешения от диспетчерской службы воздушного движения на продолжение движения.
В рамках настоящего изобретения средство 9 тревожной сигнализации может выдавать сигнал тревоги любого вида при обнаружении опасности вторжения в запрещенную зону Z1 и, в частности, звуковой сигнал тревоги или визуальный сигнал тревоги (произвольного вида).
Согласно конкретному воплощению указанное средство 9 тревожной сигнализации выдает визуальный сигнал тревоги на стандартный экран 19 навигационных данных типа индикатора навигационных данных (ИНД), представленного на фигуре 3.
В стандартном исполнении экран 19 навигационных данных имеет различные режимы отображения, а именно, как обычно:
- режим, называемый режимом дугообразного сектора, в случае которого местоположение самолета А показывается символом 20, который расположен в нижней части экрана 19 навигационных данных, в центре нескольких дуг 21 окружности, снабженных шкалами направления оси самолета и дистанции, представленными на фигуре 3. Символ 20 является неподвижным и ориентирован вверх. Поэтому пилот может легко определять местоположение своего самолета А на карте аэропорта. Карта поворачивается и плавно перемещается в зависимости от перемещения самолета А, символ 20 которого вследствие этого остается неподвижным;
- режим, называемый азимутальным круговым, в случае которого символ самолета расположен в центре экрана 19 навигационных данных. Он также является неподвижным и также ориентированным вверх. Несколько концентрических окружностей образуют отсчетные шкалы для быстрого и визуального определения дистанций и направления оси самолета; и
- режим, называемый представлением в виде плана, соответствующий виду сверху аэропорта, ориентированного в северном направлении. Самолет А перемещается по этой карте (которая является неподвижной).
Визуальный сигнал тревоги, выдаваемый согласно настоящему изобретению, может быть высвечен на экране 19 навигационных данных вне зависимости от режима отображения, используемого для этого экрана 19 навигационных данных, будь то режим дугообразного сектора, азимутальный круговой или представления в виде плана. На фигуре 3 в качестве не создающего ограничения примера признаки настоящего изобретения выделены в режиме отображения дугообразного сектора.
В дополнение к вышеуказанным элементам на экране 19 навигационных данных также отображена карта аэропорта, содержащая, например, соединительные дорожки 22 подхода и взлетно-посадочную полосу 23, открытую только для посадок.
В этом случае визуальный сигнал тревоги может представлять собой:
- визуальное выделение (другим цветом, более толстой кривой, мерцающей кривой и т.д.) на экране 19 навигационных данных взлетно-посадочной полосы 23, относительно которой обнаружена опасность вторжения. На фигуре 3 это выделение показано более толстыми пунктирными линиями; и/или
- отображение текстового сообщения 24 в дисплейном прямоугольнике 25, предусмотренном на указанном экране 19 навигационных данных.
В последнем случае предпочтительно, чтобы местоположение на экране 19 навигационных данных дисплейного прямоугольника 25, предназначенного для текстового сообщения 24, зависело от режима отображения (например, азимутального кругового режима, режима представления в виде плана или режима дугообразного сектора), имеющегося в момент обнаружения опасности вторжения.
Кроме того, согласно конкретному воплощению указанное текстовое сообщение 24 содержит наименование соответствующей взлетно-посадочной полосы, когда указанная запрещенная зона Z1 представляет собой зону взлетно-посадочной полосы, заданную вокруг взлетно-посадочной полосы 23, открытой только для посадок. Это наименование содержит два атрибута I1 и I2, местоположение одного из которых относительно другого (I1-I2 или I2-I1) указывает на сторону взлетно-посадочной полосы 23, с которой подходит самолет А. Эта сторона определяется с помощью ориентации вектора скорости носа 4 самолета А и заранее определенной ориентации указанной взлетно-посадочной полосы 23, открытой только для посадок.
Конечно, может случиться, что устройство 1 обнаружит несколько опасностей вторжения самолета А на взлетно-посадочную полосу. В этом случае оно отобразит все обнаруженные опасности вторжения, но выделит более конкретно самую близкую опасность вторжения, например, путем упоминания ее прежде всего в соответствующем текстовом сообщении 24.
Группа изобретений относится к авиации. В соответствии с предложенным способом выполняют автоматически и многократно ряд последовательных этапов. В частности, определяют текущие значения множества параметров указанного самолета (А), с помощью указанных текущих значений определяют первое местоположение (Р1), относящееся к самолету (А), и сравнивают это первое местоположение (Р1) с по меньшей мере одной запрещенной зоной (Z1). Если указанное первое местоположение (Р1) находится в указанной запрещенной зоне (Z1), выдают по меньшей мере один сигнал тревоги. Первое местоположение (Р1) соответствует экстраполированному местоположению носа самолета (А) по прошествии особого временного интервала, начинающегося с текущего момента времени, во время наземной навигации самолета (А) в аэропорту. Указанная запрещенная зона (Z1) представляет собой заранее заданную запрещенную зону аэропорта. Устройство для реализации способа содержит набор источников информации для определения активных значений множества параметров самолета. Предусмотрено вычислительное средство для определения с помощью указанных активных значений первого местоположения, соответствующего местоположению, которое является экстраполированным относительно носа самолета по прошествии особого временного интервала от текущего момента времени. Имеются также база данных, снабженная по меньшей мере одной заранее заданной запрещенной зоной аэропорта, средство сравнения для сравнения указанного первого местоположения с заранее заданной запрещенной зоной аэропорта и средство предупредительной сигнализации для выдачи по меньшей мере одного предупредительного сигнала, если первое местоположение находится в запрещенной зоне. Группа изобретений позволяет повысить безопасность наземной навигации самолета в аэропорту. 3 н. и 13 з.п. ф-лы, 3 ил.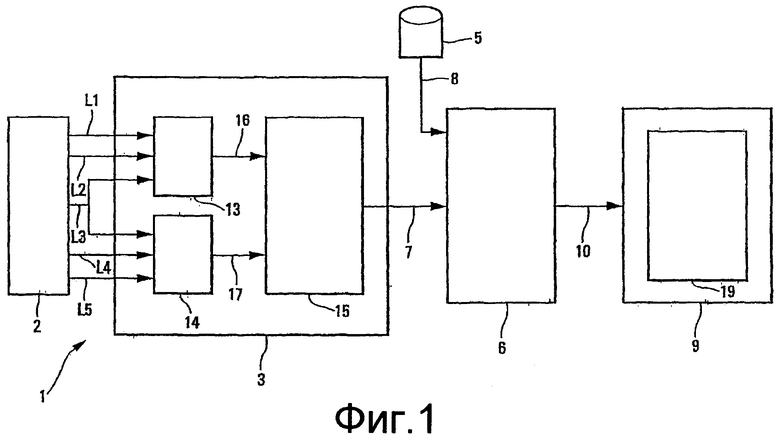
1. Способ содействия наземной навигации самолета (А) в аэропорту, в соответствии с которым выполняют автоматически и многократно ряд последовательных этапов:
a) определяют текущие значения множества параметров указанного самолета (А),
b) с помощью указанных текущих значений определяют первое местоположение (Р1), относящееся к самолету (А),
c) сравнивают это первое местоположение (Р1) с по меньшей мере одной запрещенной зоной (Z1) и
d) если указанное первое местоположение (Р1) находится в указанной запрещенной зоне (Z1), выдают по меньшей мере один сигнал тревоги,
в котором на этапе b) определяют первое местоположение (Р1), которое соответствует экстраполированному местоположению носа (4) указанного самолета (А) по прошествии особого временного интервала, начинающегося с текущего момента времени, во время наземной навигации указанного самолета (А) в аэропорту, и при этом указанная запрещенная зона (Z1) представляет собой заранее заданную запрещенную зону аэропорта.
2. Способ по п.1, в котором для определения указанного первого местоположения (Р1):
учитывают заранее заданную опорную точку (11) самолета (А),
на этапе а) измеряют:
текущее местоположение указанной опорной точки (11),
текущую скорость указанной опорной точки (11),
текущее направление самолета (А) и
текущую угловую скорость рыскания самолета (А), а
на этапе b) последовательно:
с помощью текущего местоположения указанной опорной точки (11), текущего направления самолета (А) и сдвига векторов между носом (4) самолета (А) и указанной опорной точкой (11) определяют текущее местоположение (Р0) носа (4) самолета (А),
с помощью текущей скорости указанной опорной точки (11), текущей угловой скорости рыскания самолета (А) и сдвига векторов между носом (4) самолета (А) и указанной опорной точкой (11) определяют текущую скорость носа (4) самолета (А) и
с помощью указанного текущего местоположения и текущей скорости носа (4) самолета (А), таким образом определенных, а также указанного особого временного интервала определяют указанное первое местоположение (Р1), которое вследствие этого соответствует экстраполированному местоположению носа (4) самолета (А) по завершении указанного временного интервала.
3. Способ по п.1, в котором указанная опорная точка (11) соответствует месту на самолете (А), где установлена приемная антенна (12) спутниковой системы позиционирования.
4. Способ по п.1, в котором на этапе с) указанное первое местоположение (Р1) сравнивают с множеством заранее заданных запрещенных зон (Z1), которые совместно сгруппированы в перечень запрещенных зон.
5. Способ по п.4, в котором указанный перечень запрещенных зон (Z1) содержит по меньшей мере одну зону (ZP) взлетно-посадочной полосы, которая соответствует поверхности аэропорта, заданную вокруг полосы (18) для пробега и разбега указанного аэропорта.
6. Способ по п.4, в котором указанный перечень запрещенных зон (Z1) содержит по меньшей мере одну вспомогательную зону, которая соответствует поверхности аэропорта, заданную вокруг линии «стоп» указанного аэропорта.
7. Способ по п.1, в котором набор этапов b), с) и d) осуществляют только в случае, если текущая скорость опорной точки (11) самолета (А) больше, чем первая предельная скорость, и меньше, чем вторая предельная скорость.
8. Способ по п.1, в котором указанный особый временной интервал соответствует:
заранее заданному временному интервалу Т1, если текущая скорость Va опорной точки (11) самолета (А) больше третьей предельной скорости Vs3 или равна ей, и
временному интервалу Т2, удовлетворяющему выражению T2=(Vs3·T1)/Va, если указанная текущая скорость Va меньше, чем указанная третья предельная скорость Vs3.
9. Способ по п.1, в котором на этапе d) выдают визуальный сигнал тревоги на экран (19) навигационных данных.
10. Способ по п.9, в котором указанный визуальный сигнал тревоги соответствует по меньшей мере подсвечиванию на экране (19) навигационных данных соответствующей взлетно-посадочной полосы (23), если указанная запрещенная зона представляет собой зону взлетно-посадочной полосы.
11. Способ по п.9, в котором указанный визуальный сигнал тревоги соответствует по меньшей мере текстовому сообщению (24), которое отображают на указанном экране (19) навигационных данных.
12. Способ по п.11, в котором дисплейная зона (25) указанного текстового сообщения (24) зависит от режима отображения, имеющегося на момент индикации на указанном экране (19) навигационных данных.
13. Способ по п.11, в котором указанное текстовое сообщение (24) содержит наименование соответствующей взлетно-посадочной полосы, если указанная запрещенная зона (Z1) представляет собой зону (ZP) взлетно-посадочной полосы, заданную вокруг посадочной полосы, это наименование содержит два атрибута (I1, I2), местоположение одного из которых относительно другого указывает на сторону взлетно-посадочной полосы (23), к которой подходит самолет (А), и эту сторону определяют с помощью ориентации вектора скорости носа (4) самолета (А) и ориентации указанной взлетно-посадочной полосы (23).
14. Устройство (1) для содействия наземной навигации самолета в аэропорту, содержащее:
набор (2) источников информации для определения текущих значений множества параметров указанного самолета (А),
вычислительные средства (3) для определения с помощью указанных текущих значений первого местоположения (Р1), относящегося к самолету (А),
средства (6) сравнения для сравнения указанного первого местоположения (Р1) с запрещенной зоной (Z1) и
средства (9) тревожной сигнализации для выдачи по меньшей мере одного сигнала тревоги, если указанное первое местоположение (Р1) находится в указанной запрещенной зоне (Z1),
при этом устройство также содержит базу (5) данных, которая содержит по меньшей мере одну заранее заданную запрещенную зону (Z1) аэропорта и которая соединена с указанными средствами (6) сравнения, и при этом указанные вычислительные средства (3) выполнены с возможностью определять первое местоположение (Р1), которое соответствует экстраполированному местоположению носа (4) указанного самолета (А) по прошествии особого временного интервала, начинающегося с текущего момента времени, во время наземной навигации указанного самолета (А) в аэропорту.
15. Устройство по п.14, в котором указанные средства (9) тревожной сигнализации содержит экран (19) устройства отображения информации в кабине экипажа самолета (А).
16. Самолет, который содержит устройство (1) по п.14.
| US 4646244 A, 24.02.1987 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| RU 2160930 C1, 20.12.2000 | |||
| RU 2158963 C1, 10.11.2000 | |||
| RU 94005903 A1, 20.10.1995. | |||

