Изобретение относится к системам наблюдения, контроля и управления наземным движением подвижных объектов в области наблюдения, в частности, мобильных транспортных средств и средств механизации в пределах установленной зоны наблюдения, например, аэродрома, представленной взлетно-посадочными полосами, рулежными дорожками и местами стоянки воздушных судов и обслуживающей техники.
Известны различные способы наблюдения и контроля наземного движения в зоне аэродрома.
Известен способ управления наземным движением воздушных судов и средств механизации (RU 2080033, C1), в котором осуществляют определение местоположения транспортного средства на пути его перемещения с использованием сигналов датчиков, включение оптической сигнализации сопровождения и барьера остановки, автоматическое включение дискретной предупреждающей сигнализации перед выездом на взлетно-посадочную полосу, при несанкционированном пересечении барьера остановки в импульсном режиме включения прожекторов, установленных с возможностью перекрытия поля зрения пилота. При этом в диспетчерском пункте автоматически включается звуковая и световая тревожная сигнализация. Способ предназначен для обеспечения экстренной остановки транспортных средств при попытке их несанкционированного выезда, например, на взлетно-посадочную полосу аэродрома. Однако применение способа ограничено в связи с зависимостью от погодных условий в районе аэропорта: при снижении прямой видимости диспетчером самолета для изменения уже сложившейся ситуации должны быть предприняты меры для срочного маневрирования не только одного самолета, но и других самолетов и наземных транспортных средств, что требует значительных затрат времени и приводит к задержкам вылетов.
Известен способ наблюдения за наземным движением подвижных объектов в пределах установленной зоны аэродрома, представленной взлетно-посадочными полосами, рулежными дорожками и местами стоянки воздушных судов и обслуживающей техники (RU 2521450, C2), в котором используют подключенный к когерентному оптическому рефлектометру чувствительный волоконно-оптический кабель в качестве виртуальных датчиков вибраций для обнаружения подвижных объектов на защищаемой площади поверхности в пределах установленной зоны аэродрома. При этом: предварительно проводят привязку координат характерных топографических точек на защищаемой площади поверхности в пределах установленной зоны аэродрома к местоположению виртуальных датчиков вибраций; в процессе наблюдения за наземным движением подвижных объектов измеряют амплитуды и фазы регистрируемых вибраций и проводят совместную цифровую обработку полученной информации для отслеживания в режиме реального времени параметров движения подвижных объектов, их взаимного положения и положения относительно характерных топографических точек на защищенной площади поверхности. При этом: в качестве параметров движения подвижных объектов используют их координаты местоположения, скорость движения и ускорение, эти данные подвижных объектов документируют, причем дополнительно при взлете воздушного судна фиксируют время и координаты точки начала его разбега, динамику набора скорости движения, скорость и координаты точки отрыва, а при посадке фиксируют координаты точки касания, динамику снижения скорости движения; в качестве характерных топографических точек в пределах установленной зоны аэродрома используют пороги взлетно-посадочных полос, границы взлетно-посадочных полос, места ожидания, линии "стоп", сходы с взлетно-посадочных полос, пересечения рулежных дорожек, границы пересечений, границы блоков переключаемых огней осевой линии, места парковки и углы строений. Кроме того, в процессе наблюдения за наземным движением подвижных объектов их идентифицируют по типам воздушных судов на основе алгоритмов распознавания спектров вибраций в известных режимах работы их двигателей, например, на малом газу, а обслуживающей техники - по частоте оборотов двигателя в характерных режимах, например, в режиме холостых оборотов. Система наблюдения за наземным движением подвижных объектов в пределах установленной зоны аэродрома включает чувствительный волоконно-оптический кабель, подключенный к когерентному оптическому рефлектометру и расположенный в пределах установленной зоны аэродрома вдоль взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и/или обслуживающей техники, при этом расположение чувствительного волоконно-оптического кабеля в плане повторяет конфигурацию расположения взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и обслуживающей техники. При этом чувствительный волоконно-оптический кабель выполнен неразрывным, помещен в грунт вблизи границ взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и обслуживающей техники или в бетонное покрытие взлетно-посадочных полос, рулежных дорожек и мест стоянок и пересекает, по крайней мере, один раз взлетно-посадочную полосу и/или рулежную дорожку и/или место стоянки воздушных судов и/или обслуживающей техники, или расположен зигзагообразно вдоль взлетно-посадочных полос, рулежных дорожек и мест стоянок воздушных судов и обслуживающей техники.
Однако визуальные способы наблюдения непосредственно диспетчерами с вышки, имеющей ограниченную высоту, как и оптико-локационный способ наблюдения, имеют ограничения по погодным условиям (туман, интенсивные атмосферные осадки), так и по высоте наблюдения.
Способы контроля, основанные на устных докладах экипажей по каналам связи, не являются объективными и в ряде случаев в истории авиации приводили к катастрофам.
Известен способ управления воздушными судами, находящимся на земле (RU 2369908, 2009), в котором каждый элемент аэродрома, который находится в поле индикации просмотрового экрана на приборной доске самолета, снабжают формуляром, который содержит информацию, относящуюся к указанному элементу, что делает возможным осуществление воспроизведения особенно удобочитаемых и понятных изображений на указанном экране, обеспечивает возможность оказания помощи пилоту в части самостоятельного определения легким способом местоположения на аэродроме во время выруливания указанного самолета. При отображении используется средство для поиска элементов аэропорта, которые отображаются в поле индикации экрана. Имеется средство для проверки, будет ли каждый из указанных элементов составлять часть первой группы, для которой основная точка привязки находится внутри зоны формуляров, или второй группы, для которой основная точка привязки расположена за пределами зоны формуляров. Предусмотрены также средство для определения дополнительной точки привязки элементов второй группы, расположенной на пересечении оси указанного элемента и зоны формуляров, и средство для представления на экране каждого элемента формуляра, содержащего данные, относящиеся к указанному элементу. Формуляры, относящиеся к первой группе, расположены в основной точке, а формуляры, относящиеся ко второй группе, - в дополнительной зоне привязки. Способ позволяет исключить чрезмерную перегрузку поля отображения, однако является сложным в реализации. Кроме того, способ контроля наземного движения с помощью отслеживания ситуаций радиолокаторами, с применением одновременно многочисленных радиоэлектронных средств (локаторов, дальномеров, связных радиостанций) требует разрешения на использование многих радиочастот, причем возможны затенения одних объектов другими, а также ложные отметки, обусловленные наличием боковых лепестков антенны локатора. При этом не устранена зависимость решений диспетчера от показаний бортового оборудования самолета, зависящих от условий видимости на аэродроме.
Известна система контроля воздушного движения (US, 2009143968, A1), содержащая процессор, память, источник электронных полетных данных, устройство сенсорного дисплея, клавиатуру, шаровой манипулятор/вспомогательную клавиатуру, и известен способ отслеживания, записи, взаимодействия и организации электронных полетных данных в отношении пространства поверхности аэропорта, включающий:
- отображение поверхности аэропорта в виде карты на сенсорном дисплее;
- отображение полетной информации в виде элемента цветных кодированных полетных данных на карте аэропорта;
- привязка указанного элемента полетных данных к местоположению самолета на карте аэропорта;
- перемещение указанного элемента путем касания и волочения указанного элемента на желаемое местоположение на карте аэропорта;
- отображение только необходимой информации для конкретной операции;
- отображение полной полетной информации для самолета, находящегося в области считывания данных;
- использование набора сенсорных кнопок, отображенных на карте, для предоставления самолету взлетно-посадочной полосы, предоставления данных о пересечениях или других маршрутных данных, для индикации разрешения к вылету и для передачи полетных данных между местом размещения операторов и каналами воздушного движения;
- указание зон на карте, в которых указанные полетные элементы данных будут связаны между собой поочередно;
- использование системы информационных окон на карте аэропорта для отображения текущих данных, времени и кодов автоматической информационной системы терминала;
- использование набора напоминаний, которые включают обработку вида индикации, родовых и самолетных таймеров, родовой и специфической ярко высвеченной критической информации, индикацию рулевых дорожек, таймеров, ассоциированных с взлетно-посадочной полосой, информацию о статусе самолета в пространстве и времени вылета, и связи наземного оператора и экранов местных операторов так, что изменения, сделанные в полетных элементах на одном дисплее, отражаются на других.
При этом шаг отображения полетной информации в виде элемента цветных кодированных полетных данных на карте аэропорта дополнительно включает:
- отображение ожидающего полетного элемента в позиции наземного оператора вылета самолета на карте самолета около точки указанного самолетного трапа, и этот ожидающий элемент состоит из данных полетных характеристик, содержащих его позывной, тип, первую привязку вылета, привязку взлетно-посадочной полосы, пересечение заданий, прогнозируемое время вылета или контролируемое измененное время, индикацию обслуживания, индикацию обработки полетных данных, индикацию таймера, индикацию статуса задержки;
- отображение указанного элемента полетных данных как отправляемого на указанной позиции наземного оператора и позиции указанного местного оператора для этого вылетающего элемента, когда наземный оператор двигает указанный ожидающий полетный элемент за указанную точку ожидания взлета в карте аэропорта, и указанный отправляемый элемент полетных данных содержит характеристики полетных данных, содержащие позывной, тип, первую привязку вылета, привязку взлетно-посадочной полосы, пересечение заданий, прогнозируемое время вылета или контролируемое измененное время, индикацию обслуживания, индикацию обработки полетных данных, индикацию таймера, индикацию статуса задержки.
Однако предоставление оператору значительного объема словесной и цифровой информации полетных данных по каждому самолету в многочисленных окнах на карте аэропорта значительно отвлекает внимание оператора при отслеживании соответствия действий пилотов визуализированным полетным данным и выполнения очередности вылета.
При этом все известные способы управления движением наземных объектов включают передачу команд диспетчера транспортным средствам по каналам аудио-связи в виде текстовой информации, ясность воспроизведения которой в значительной мере зависит от помех и погодных условий. Кроме того, управление мобильными объектами предлагается на основе их исходного состояния, без учета последующих изменений и изменений в ситуации в области наблюдения.
Таким образом, основными причинами, затрудняющими диспетчеризацию и маршрутизацию при управлении транспортными средствами на аэродроме являются: отсутствие видимости на аэродроме (туман и др.); ограничения по использованию эфирного времени при ведении радиосвязи в связи с большим объемом передаваемой полетной информации; наличие искусственных препятствий, мешающих непосредственному обзору места наблюдения; условия ограничения видимости в ночное время; наличие высотных препятствий в зонах захода на посадку и вылета учитывающихся при расчете нормативных минимумов дистанций и интервалов движения, что значительно осложняет решение задач регулирования движения, связанных с конфликтными ситуациями на аэродроме, с помощью вычислительных средств. Совершенствование технологии обслуживания воздушного движения с использованием перспективных средств наблюдения для обеспечения требуемого уровня безопасности полетов при повышении пропускной способности аэродромов, а также повышения экономичности воздушного движения, являются весьма актуальными.
Целью создания настоящего изобретения является обеспечение согласованных действий диспетчера и пилота, исключение возможности отклонений транспортных средств от заданных маршрутов движения по рулежным дорожкам и взлетно-посадочным полосам и пересечений на маршрутах и предупреждение возникновения потенциально конфликтных ситуаций при нарушении безопасных дистанций и интервалов движения, а также исключение для диспетчера зависимости его решений от погодных условий и затененности объектов на отображении области наблюдения.
При создании настоящего изобретения была поставлена техническая задача обеспечения визуализации для диспетчера области наблюдения без затенений ее отдельных частей, с возможностью выбора им желаемого масштаба, угла обзора и ракурса наблюдения за положением транспортных средств при их движении на аэродроме в соответствии с заданными маршрутами с возможностью внесения изменений в их маршруты путем подачи промежуточных команд остановки или маневрирования путем отображения смоделированных трехмерных изображений обстановки на аэродроме и обеспечения обратной связи с экипажем в текущем режиме с подачей команд установленной формы по каналам связи, не зависящим от погодных условий.
Ожидаемым техническим результатом являлось повышение безопасности воздушного движения за счет формирования ситуационной осведомленности диспетчеров службы движения о движении на аэродроме с возможностью влияния на маршрутизацию транспортных средств в текущем режиме.
Поставленная задача была решена разработкой способа управления наземным движением мобильных объектов на аэродроме в области наблюдения, представленной взлетно-посадочными полосами, рулежными дорожками и местами стоянки воздушных судов и обслуживающей техники, в котором:
- на основе приема, анализа и систематизации информации от периферийных источников информации, включающих средства наблюдения, размещенные в области наблюдения и в ее окрестностях, источники информации о параметрах, маршрутах и времени перемещения мобильных объектов в области наблюдения и о рельефе местности, средства обнаружения и индикации местоположения подвижных объектов, от спутниковой навигационной системы, от метеорологических источников, от мобильных объектов, подлежащих контролю и управлению, от терминалов управления движением обеспечивают:
- отображение на сенсорном экране монитора диспетчера в текущем режиме в реальном масштабе времени обстановки в области наблюдения в 3-D формате, включающее:
- отображение виртуальной трехмерной модели области наблюдения, выполненной, по меньшей мере:
- с отображением на ней рельефа местности, искусственных препятствий, трасс движения и областей маневрирования, включая, по меньшей мере, взлетно-посадочные полосы, рулежные дорожки и места стоянки мобильных объектов;
- с возможностью выбора масштаба, угла обзора и ракурса наблюдения;
- с возможностью принудительной активации индикации, по меньшей мере, маршрутов движения, границ трасс и границ препятствий на модели области наблюдения;
- с автоматическим прекращением индикации указанных маршрутов движения и границ после завершения маневрирования и движения по ним,
- с привязкой указанной модели ее контрольной точкой начала счисления координат мобильного объекта в области наблюдения к определенной точке в инерциальной системе координат,
- с возможностью ручного управления ориентацией указанной модели в динамическом режиме относительно ее контрольной точки;
- с масштабированием модели при изменении угла ее обзора и/или ракурса наблюдения диспетчером при выбранной скорости такого изменения;
- отображение виртуальных трехмерных моделей мобильных объектов, ассоциированных через каналы связи и передачи данных с реальными мобильными объектами, находящимися в области наблюдения, выполненных, по меньшей мере:
- с привязкой моделей к системе координат указанной модели области наблюдения,
- с возможностью динамической симуляции движения указанных моделей мобильных объектов в режиме реального времени на основе координатных данных реальных мобильных объектов, находящихся в области наблюдения,
- с масштабированием модели при изменении угла ее обзора и/или ракурса наблюдения соответственно масштабу, углу обзора и ракурса наблюдения модели области наблюдения,
- с возможностью принудительной активации ассоциированной с указанной моделью мобильного объекта блока информации о местоположении и технических данных реального мобильного объекта в режиме реального времени и индикации его статуса,
- с возможностью автоматической смены цвета индикации модели при изменении статуса мобильного объекта;
- отображение виртуальных трехмерных моделей метеорологических объектов потенциальной опасности для движения реальных мобильных объектов в области наблюдения, выполненных с привязкой таких моделей к системе координат указанной модели области наблюдения в режиме реального времени;
- отображение блоков метеорологической информации о текущей обстановке в области аэродрома;
- отображение в текущем динамическом режиме блоков данных об очередности движения и заданных маршрутах движения мобильных объектов в области наблюдения и времени начала и окончания маршрута;
- отображение в динамическом режиме блока информации о направлении и скорости ветра с графической и цифровой его визуализацией около линии старта на взлетно-посадочной полосе;
- путем тактильного воздействия диспетчера на определенную область указанного экрана осуществляют:
- выбор угла обзора, масштаба и ракурса наблюдения и выбор зоны управления на указанной модели области наблюдения;
- активацию на модели области наблюдения индикации заданного маршрута движения мобильных объектов в выбранной зоне управления;
- активацию окна блока данных об очередности движения и маршрута движения мобильных объектов;
- активацию окна блока метеорологической информации;
- активацию визуализации моделей метеорологических объектов потенциальной опасности, если таковые присутствуют в текущий момент времени в зоне управления;
- активацию всплывающих окон блоков информации моделей мобильных объектов, ассоциированных с реальными мобильными объектами и находящихся в выбранной зоне управления и/или прибывающих в зону управления;
- включение свето-сигнальных устройств в области наблюдения;
- осуществляют анализ виртуальной реальности по критериям опасности возникновения конфликтных ситуаций между мобильными объектами, находящимися в выбранной зоне управления и/или прибывающими в зону управления, с уточнением статуса каждого мобильного объекта и автоматической индикацией модели мобильного объекта, находящегося в конфликтной ситуации в зоне управления области наблюдения, сигналом красного цвета о запрещении движения, и отсутствием индикации у модели мобильного объекта, не совершающего движения или при его движении по заданному маршруту;
- определяют в динамическом режиме в текущий момент времени местоположение каждого мобильного объекта в системе координат реальной области наблюдения на основе координат виртуальной модели мобильного средства в модели области наблюдения;
- после наступления заданного времени начала движения мобильного объекта по маршруту обеспечивают:
- автоматическое включение цветовой, например желтой, индикации модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса на его обслуживание диспетчером, и автоматическое отключение желтой индикации указанной модели при движении модели по маршруту,
- автоматическое включение другой цветовой индикации, например синей, модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса команды о продолжении движения по маршруту после его остановки на маршруте;
- автоматическое включение другой, отличной от указанных выше, цветовой индикации, например зеленой, модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса о разрешении на взлет;
- осуществляют в ручном режиме управление диспетчером моделями мобильных объектов, находящихся в зоне управления в конфликтной ситуации между ними или остановленных диспетчером на маршруте, путем тактильного воздействия диспетчера на экран, приводящего к вызову на экран всплывающего окна перечня возможных команд управления мобильным объектом для выбора команды, обеспечивающей исключение конфликта, и последующей передачей выбранной команды по каналу связи на мобильный объект и изменение красной индикации модели мобильного объекта на желтую индикацию после выхода мобильного объекта из конфликта;
- обеспечивают в автоматическом режиме прекращение индикации указанных маршрутов движения и указанных границ на модели области наблюдения после завершения маневрирования и движения по ним и отключение соответствующих свето-сигнальных устройств на аэродроме.
При этом, согласно изобретению, возможно указанную индикацию осуществлять с поэтапным изменение яркости или насыщенности цвета.
При этом, согласно изобретению, возможно указанную индикацию на экране сопровождать звуковыми сигналами в месте размещения диспетчера и/или в кабине транспортного средства.
Поставленная задача была также решена созданием устройства для осуществления способа по п. 1, выполненного в виде аппаратно-программного средства, содержащего сервер и процессор вычислительного средства, приспособленные для приема, обработки и отображения на сенсорном экране монитора, блоков информации о движении мобильных объектов на аэродроме в области наблюдения, о рельефе местности и искусственных препятствий, о метеорологической обстановке, отличающегося тем, что:
- содержит блок оценки, анализа и визуализации, на основе приема, анализа и систематизации информации от периферийных источников информации, включающих средства наблюдения, размещенные в области наблюдения и в ее окрестностях, источники информации о параметрах, маршрутах и времени перемещения мобильных Объектов в области наблюдения и о рельефе местности, средства обнаружения и индикации местоположения подвижных объектов, от спутниковой навигационной системы, от метеорологических источников, от мобильных объектов, подлежащих контролю и управлению, от терминалов управления движением обеспечивающий:
- отображение на сенсорном экране монитора диспетчера в текущем режиме в реальном масштабе времени обстановки в области наблюдения в 3-D формате, включающее:
- отображение виртуальной трехмерной модели области наблюдения, выполненной, по меньшей мере:
- с отображением на ней рельефа местности, искусственных препятствий, трасс движения и областей маневрирования, включая, по меньшей мере, взлетно-посадочные полосы, рулежные дорожки и места стоянки мобильных объектов;
- с возможностью выбора масштаба, угла обзора и ракурса наблюдения;
- с возможностью принудительной активации индикации, по меньшей мере, маршрутов движения, границ трасс и границ препятствий на модели области наблюдения;
- с автоматическим прекращением индикации указанных маршрутов движения и границ после завершения маневрирования и движения по ним,
- с привязкой указанной модели ее контрольной точкой начала счисления координат мобильного объекта в области наблюдения к определенной точке в инерциальной системе координат,
- с возможностью ручного управления ориентацией указанной модели в динамическом режиме относительно ее контрольной точки;
- с масштабированием модели при изменении угла ее обзора и/или ракурса наблюдения диспетчером при выбранной скорости такого изменения;
- отображение виртуальных трехмерных моделей мобильных объектов, ассоциированных через каналы связи и передачи данных с реальными мобильными объектами, находящимися в области наблюдения, выполненных, по меньшей мере:
- с привязкой моделей к системе координат указанной модели области наблюдения,
- с возможностью динамической симуляции движения указанных моделей мобильных объектов в режиме реального времени на основе координатных данных реальных мобильных объектов, находящихся в области наблюдения,
- с масштабированием модели при изменении угла ее обзора и/или ракурса наблюдения соответственно масштабу, углу обзора и ракурса наблюдения модели области наблюдения,
- с возможностью принудительной активации ассоциированной с указанной моделью мобильного объекта блока информации о местоположении и технических данных реального мобильного объекта в режиме реального времени и индикации его статуса,
- с возможностью автоматической смены цвета индикации модели при изменении статуса мобильного объекта;
- отображение виртуальных трехмерных моделей метеорологических объектов потенциальной опасности для движения реальных мобильных объектов в области наблюдения, выполненных с привязкой таких моделей к системе координат указанной модели области наблюдения в режиме реального времени;
- отображение блоков метеорологической информации о текущей обстановке в области аэродрома;
- отображение в текущем динамическом режиме блоков данных об очередности движения и заданных маршрутах движения мобильных объектов в области наблюдения и времени начала и окончания маршрута;
- отображение в динамическом режиме блока информации о направлении и скорости ветра с графической и цифровой его визуализацией около линии старта на взлетно-посадочной полосе;
- при тактильном воздействии диспетчера на определенную область указанного экрана обеспечивает возможности осуществления диспетчером:
- выбора угла обзора, масштаба и ракурса наблюдения и выбор зоны управления на указанной модели области наблюдения;
- активации на модели области наблюдения индикации заданного маршрута движения мобильных объектов в выбранной зоне управления;
- активации окна блока данных об очередности движения и маршрута движения мобильных объектов;
- активации окна блока метеорологической информации;
- активации визуализации моделей метеорологических объектов потенциальной опасности, если таковые присутствуют в текущий момент времени в зоне управления;
- активации всплывающих окон блоков информации моделей мобильных объектов, ассоциированных с реальными мобильными объектами и находящихся в выбранной зоне управления и/или прибывающих в зону управления;
- включения свето-сигнальных устройств в области наблюдения;
- анализ виртуальной реальности по критериям опасности возникновения конфликтных ситуаций между мобильными объектами, находящимися в выбранной зоне управления и/или прибывающими в зону управления, с уточнением статуса каждого мобильного объекта и автоматической индикацией модели мобильного объекта, находящегося в конфликтной ситуации в зоне управления области наблюдения, сигналом красного цвета о запрещении движения, и отсутствием индикации у модели мобильного объекта, не совершающего движения или при его движении по заданному маршруту;
- определение в динамическом режиме в текущий момент времени местоположения каждого мобильного объекта в системе координат реальной области наблюдения на основе координат виртуальной модели мобильного средства в модели области наблюдения;
- после наступления заданного времени начала движения мобильного объекта по маршруту:
- автоматическое включение цветовой, например желтой, индикации модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса на его обслуживание диспетчером, и автоматическое отключение желтой индикации указанной модели при движении модели по маршруту,
- автоматическое включение другой цветовой индикации, например синей, модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса команды о продолжении движения по маршруту после его остановки на маршруте;
- автоматическое включение другой, отличной от указанных выше, цветовой индикации, например зеленой, модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса о разрешении на взлет;
- управление диспетчером в ручном режиме моделями мобильных объектов, находящихся в зоне управления в конфликтной ситуации между ними или остановленных диспетчером на маршруте, путем тактильного воздействия диспетчера на экран, приводящего к вызову на экран всплывающего окна перечня возможных команд управления мобильным объектом для выбора команды, обеспечивающей исключение конфликта, и последующей передачей выбранной команды по каналу связи на мобильный объект и изменение красной индикации модели мобильного объекта на желтую индикацию после выхода мобильного объекта из конфликта;
- в автоматическом режиме прекращение индикации указанных маршрутов движения и указанных границ на модели области наблюдения после завершения маневрирования и движения по ним и отключение соответствующих светосигнальных устройств на аэродроме.
При этом, согласно изобретению, указанная цветовая индикация может быть с поэтапным изменением яркости или насыщенности цвета.
При этом, согласно изобретению, возможно сопровождение указанной индикации на экране звуковыми сигналами в месте размещения диспетчера и/или в кабине транспортного средства.
В дальнейшем способ и устройство согласно изобретению для управления наземным движением мобильных объектов на аэродроме поясняются примером их осуществления и прилагаемыми чертежами, на которых:
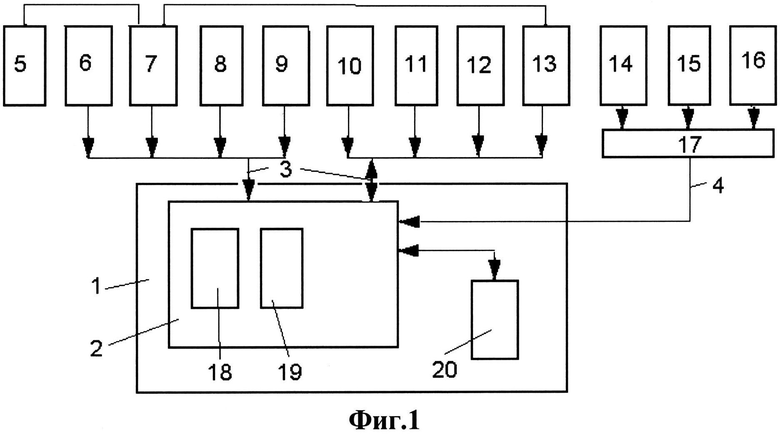
Фиг. 1 - схема устройства и его взаимодействие с периферийными устройствами;
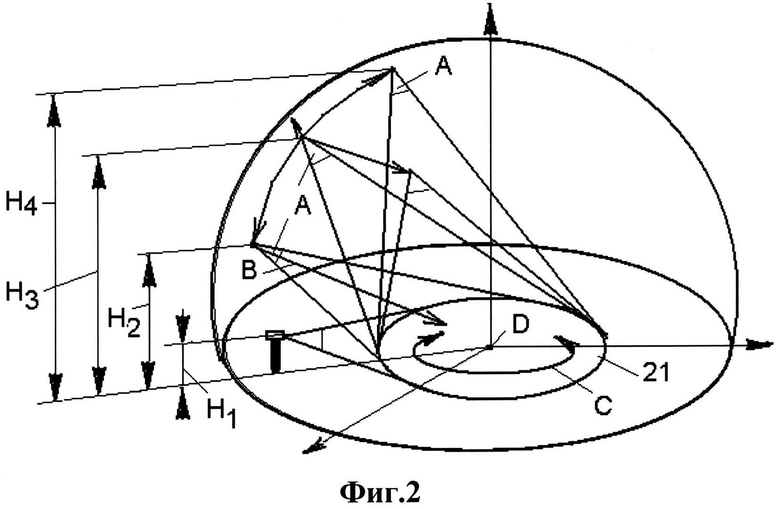
Фиг. 2 - схема выбора угла обзора и ракурса наблюдения в способе согласно изобретению;
Фиг. 3 - схематичное изображение экрана с отображением модели области наблюдения на аэродроме и моделей мобильных объектов на ней.
При этом приведенный пример осуществления способа согласно изобретению и устройства для его осуществления не являются исчерпывающими, не ограничивают возможностей изобретения и не выходят за рамки формулы изобретения.
Способ управления наземным движением мобильных объектов на аэродроме согласно изобретению реализован с помощью устройства согласно изобретению, схема которого показана на Фиг. 1, выполненного в виде аппаратно-программного средства 1, содержащего сервер 2, приспособленный для соединения с помощью каналов 3 связи и линиями 4 передачи данных с внешними наземными периферийными источниками информации, например, информационными источниками 5-9, с мобильными объектами 10-13, подлежащими контролю и управлению диспетчером, со спутниковыми системами 14-17 позиционирования.
При этом сервер 2 содержит процессор 18, блок 19 оценки, анализа и визуализации информации и сенсорный экран 20. В качестве монитора для отображения должен использоваться жидкокристаллический сенсорный монитор с диагональю не менее 56 дюйма.
При этом периферийными информационными источниками 5-9 и 14-17 могут служить, например, средства наблюдения (радары), размещенные в области наблюдения и в ее окрестностях, источники информации о параметрах, маршрутах и времени перемещения мобильных объектов в области наблюдения и о рельефе местности, средства обнаружения и индикации местоположения подвижных объектов, спутниковая навигационная система, метеорологические источники, терминалы управления движением, источники полетной информации, автономные метеостанции, метеорологические локаторы и лидары, тепловизионные (ИК-диапазона) и оптические средства обнаружения местоположения объектов, средства авиационной радиосвязи системы независимого наблюдения и другие источники информации.
Блок 19 оценки, анализа и визуализации на основе приема, анализа и систематизации информации от периферийных источников 5-9 и 14-17 информации о параметрах и наличии и движении мобильных объектов на аэродроме в области наблюдения, о рельефе местности и искусственных препятствий, о метеорологической обстановке, с помощью процессора 18 обеспечивает на сенсорном экране 20 в области размещения диспетчера в текущем режиме в реальном масштабе времени в области наблюдения отображение в 3-D формате виртуальной трехмерной модели области наблюдения, виртуальных трехмерных моделей мобильных объектов, ассоциированных через каналы связи и передачи данных с реальными мобильными объектами, находящимися в области наблюдения, и, при необходимости, виртуальных трехмерных моделей метеорологических объектов потенциальной опасности для движения реальных мобильных объектов в области наблюдения.
При этом отображение указанных моделей на сенсорном экране 20 предусматривает возможность их отображения с выбранным углом обзора, ракурсом и в выбранном масштабе.
Как показано на схеме Фиг. 2, в способе согласно изобретению при отображении модели области 21 наблюдения на сенсорном экране 20 обеспечивается возможность выбора угла A обзора и ракурса B наблюдения путем плавного изменения положения точки наблюдения: высоты H1 (на уровне аэродромной вышки), H2, H3, H4 над областью 21 наблюдения и поворотом C области 21 наблюдения вокруг ее контрольной точки D и возможность ручного управления ориентацией указанной модели в динамическом режиме относительно ее контрольной точки.
При этом, согласно изобретению, обеспечивают привязку указанной модели области 21 ее контрольной точкой D начала счисления координат в области 21 наблюдения к определенной точке в инерциальной системе координат. Виртуальные трехмерные модели мобильных объектов и виртуальные трехмерные модели метеорологических объектов потенциальной опасности выполняют с привязкой их к системе координат указанной модели области 21 наблюдения в режиме реального времени и с масштабированием при изменении угла их обзора и/или ракурса наблюдения соответственно масштабу, углу обзора и ракурса наблюдения модели области 21 наблюдения при выбранной скорости такого изменения.
Как показано на Фиг. 3, виртуальную трехмерную модель области 21 наблюдения выполняют с отображением на ней рельефа местности, искусственных препятствий, трасс движения и областей маневрирования, включая, по меньшей мере, взлетно-посадочные полосы 22, рулежные дорожки 23 и места 24 стоянки мобильных объектов.
Виртуальные трехмерные модели мобильных объектов, например, самолетов 25, транспортных средств 26, ассоциированы через каналы связи и передачи данных с реальными мобильными объектами, находящимися в области 21 наблюдения.
При этом виртуальная трехмерная модель области 21 наблюдения выполнена с возможностью принудительной активации индикации, по меньшей мере, маршрутов 27 движения, границ 28 трасс и границ 29 препятствий на модели области 21 наблюдения и с автоматическим прекращением индикации указанных маршрутов 27 движения и границ после завершения маневрирования и движения по ним.
Виртуальные трехмерные модели мобильных объектов выполнены с возможностью динамической симуляции движения указанных моделей мобильных объектов в режиме реального времени на основе координатных данных реальных мобильных объектов 25, 26, находящихся в области 21 наблюдения,
Блок 19 оценки, анализа и визуализации также формирует блоки информации о местоположении и технических данных реального мобильного объекта 25 и/или 26 в режиме реального времени, блоков данных об очередности движения и заданных маршрутах движения мобильных объектов в области наблюдения и времени начала и окончания маршрута, блоки метеорологической информации о текущей обстановке в области аэродрома.
Блок 19 оценки, анализа и визуализации также обеспечивает визуализацию индикации статуса мобильных объектов 25, 26, например, путем его индикации соответствующего цвета с помощью отображения индикации на сенсорном экране 20, например, в виде сферических полупрозрачных элементов 30, выполненных с возможностью изменения цвета индикации модели при изменении статуса мобильного объекта. Указанная цветовая индикация может быть обеспечена с поэтапным изменением яркости или насыщенности цвета в соответствии с остротой ситуации и продолжительностью этапа управления. Может быть обеспечено сопровождение указанной индикации на экране звуковыми сигналами в месте размещения диспетчера и/или на мобильном объекте, например, в кабине транспортного средства. Причем наиболее яркая индикация обеспечивается при конфликтных ситуациях или в начале этапа управления или при начале движения мобильного средства по скорректированному диспетчером маршруту после выхода из конфликтной ситуации. При движении мобильного объекта по заданному маршруту индикация прекращается после начала его движения.
При этом указанные блоки информации могут быть отображены на сенсорном экране в виде постоянных окон 31 или всплывающих окон 32.
Блок 19 оценки, анализа и визуализации также формирует блоки информации о направлении и скорости ветра в области наблюдения с их отображением на сенсорном экране, например, во всплывающих окнах (не показано), и обеспечивает графическую и цифровую визуализацию направления ветра около линии старта на взлетно-посадочной полосе (не показано).
Блок 19 оценки, анализа и визуализации обеспечивает определение в динамическом режиме в текущий момент времени местоположение каждого мобильного объекта в системе координат реальной области 21 наблюдения на основе координат виртуальной модели мобильного объекта в модели области наблюдения.
Согласно способу управления согласно изобретению, после наступления заданного времени начала движения мобильного объекта по заданному маршруту и в процессе поэтапного выполнения мобильным объектом маршрута, обеспечивается:
- автоматическое включение цветовой, например желтой, индикации модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса на его обслуживание диспетчером, и автоматическое отключение желтой индикации указанной модели при движении модели по маршруту;
- автоматическое включение другой цветовой индикации, например синей, модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса команды о продолжении движения по маршруту после его остановки на маршруте;
- автоматическое включение другой, отличной от указанных выше, цветовой индикации, например зеленой, модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса о разрешении на взлет;
Способ управления наземным движением мобильных объектов на аэродроме осуществляется следующим образом.
При тактильном воздействии диспетчера на определенную область указанного экрана, например, в область размещения индикаторов 33 и 33 выбора зоны управления и/или индикаторов 34 выбора скорости поворота изображения, диспетчер выбирает необходимый ему угол обзора, масштаб и ракурс наблюдения.
Диспетчер может с помощью тактильного воздействия на экран подать сигнал включения свето-сигнальных устройств в области наблюдения.
Диспетчер активирует окно блока метеорологической информации и анализирует представленные на модели области 21 наблюдения отображения метеорологических объектов, если таковые имеются.
Диспетчер активирует окна блока данных мобильных объектов, ассоциированных с реальными мобильными объектами и находящихся в выбранной зоне управления и/или прибывающих в зону управления, и очередности движения и маршрута движения мобильных объектов например, в виде таблиц отправления (взлета) и прилета (посадки) самолетов в область 21 наблюдения, и производит в зоне управления выбор маршрута мобильного объекта, подлежащего управлению и контролю, с автоматическим вызовом индикации маршрута на модели области 21 наблюдения.
Диспетчер знакомится с ситуацией в зоне управления и в области 21 наблюдения, уделяя внимание цвету и интенсивности представленной индикации моделей мобильных объектов, находящихся в выбранной зоне управления, в частности, индикации красного цвета, свидетельствующей о запрещении движения в связи с конфликтной ситуацией, оцененной блоком 19 как имеющей несоответствие заданным параметрам маршрута и препятствующей движению мобильного объекта по заданному маршруту.
Для разрешения конфликтной ситуации диспетчер в ручном режиме управления моделями мобильных объектов, находящихся в зоне управления в конфликтной ситуации между ними или остановленных диспетчером на маршруте, принимает решение выбора команды, обеспечивающей исключение конфликта, путем тактильного воздействия диспетчера на экран, приводящего к вызову на экран всплывающего окна перечня возможных команд управления мобильным объектом, и выбирает соответствующую команду для действия экипажа мобильного объекта. При этом автоматически обеспечивается передача выбранной команды по каналу связи на мобильный объект, а также изменение красной индикации модели мобильного объекта на желтую индикацию после выхода мобильного объекта из конфликта.
После завершения маневрирования и движения мобильного объекта по предписанным маршрутам в автоматическом режиме на модели области 21 наблюдения прекращается индикация маршрутов и отключаются соответствующие светосигнальные устройства на аэродроме.
Система комплексной обработки информации на основе трехмерной визуализации ситуационной осведомленности позволяет решать задачи обнаружения и идентификации объектов движения и представления информации в синтетической форме на сенсорном экране рабочего места диспетчера в условиях недостаточности визуального обзора поверхности аэродрома. При этом отсутствует необходимость в строительстве капитальных сооружений (аэродромных вышек), которые по критериям обеспечения безопасности полетов на аэродроме относится к объектам высокой степени опасности в части искусственных препятствий и в настоящее время учитываются при формировании безопасных зон захода на посадку и вылета самолета. Изобретение позволяет решить задачу по экономии финансовых средств от вложений на проектирование, строительство и содержание капитальных сооружений на аэродроме. По предварительным оценкам на строительстве и эксплуатации «вышки» можно получить значительные экономические выгоды.
Совокупность системы комплексной обработки информации с устройством согласно изобретению формирует новый алгоритм в технологическом процессе обслуживания движения, так как при наличии процедурно емкого информационного потока по линии «пилот-диспетчер» с использованием традиционных авиационных радиосвязных средств позволяет оптимизировать операционную деятельность диспетчера, связанную с голосовым фактором. Так при норме предоставления словесной информации из расчета 100 букв в минуту предложенный способ управления с использованием линии передачи цифровых данных значительно сокращает трудоемкость операционных действий диспетчера и тем самым позволяет повысить его производительность в отношении пропускной способности аэродрома.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство для управления движением на аэродроме | 2015 |
|
RU2634502C2 |
| СПОСОБ И СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНЫМ ДВИЖЕНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ В ПРЕДЕЛАХ УСТАНОВЛЕННОЙ ЗОНЫ АЭРОДРОМА | 2012 |
|
RU2521450C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| СИСТЕМА НАБЛЮДЕНИЯ И СПОСОБ ОБНАРУЖЕНИЯ ЗАСОРЕНИЯ ИЛИ ПОВРЕЖДЕНИЯ АЭРОДРОМА ПОСТОРОННИМИ ПРЕДМЕТАМИ | 2012 |
|
RU2596246C2 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| Многофункциональный центр управления движением и моделирования динамики летательных аппаратов | 2017 |
|
RU2646784C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| Беспилотный летательный аппарат и способ безопасной посадки беспилотного летательного аппарата | 2016 |
|
RU2712716C2 |
| СИСТЕМА ПЛАНИРОВАНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ТАКТИЧЕСКОЙ ГРУППЫ САМОЛЕТОВ | 1999 |
|
RU2147141C1 |
Группа изобретений относится к системам наблюдения, контроля и управления наземного движения в зоне аэродрома. При способе управления наземным движением мобильных объектов на аэродроме в области наблюдения, представленной взлетно-посадочными полосами, рулежными дорожками и местами стоянки мобильных объектов, на основе приема и обработки информации от средств наблюдения, метеорологической информации, информации от мобильных объектов и терминалов управления отображают определенным образом на сенсорном экране монитора в текущем режиме, в реальном времени, в 3-D формате виртуальную трехмерную модель области наблюдения с рельефом местности, препятствиями, трассами движения, местами стоянки мобильных объектов, отображают виртуальные трехмерные модели мобильных объектов, ассоциированные через каналы связи и передачи данных с реальными объектами, осуществляют анализ виртуальной реальности по критериям опасности возникновения конфликтных ситуацией с их индикацией определенным образом на экране, осуществляют в ручном режиме управление моделями мобильных объектов, а также передачу необходимых команд путем тактильного воздействия диспетчера на экран. Устройство для управления наземным движением мобильных объектов на аэродроме содержит сервер, процессор вычислительного средства, приспособление для приема, обработки и отображения информации на сенсорном экране монитора. Обеспечивается безопасность движения транспортных средств на аэродроме. 2 н. и 4 з.п. ф-лы, 3 ил.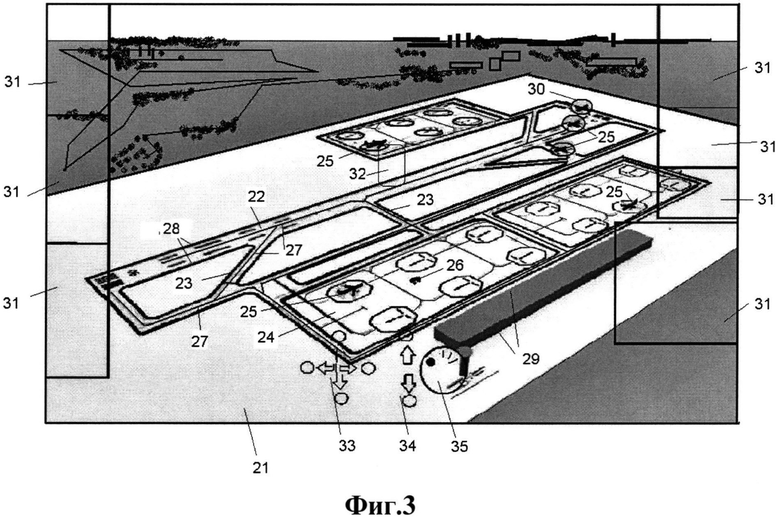
1. Способ управления наземным движением мобильных объектов на аэродроме в области наблюдения, представленной взлетно-посадочными полосами, рулежными дорожками и местами стоянки воздушных судов и обслуживающей техники, в котором:
- на основе приема, анализа и систематизации информации от периферийных источников информации, включающих средства наблюдения, размещенные в области наблюдения и в ее окрестностях, источники информации о параметрах, маршрутах и времени перемещения мобильных объектов в области наблюдения и о рельефе местности, средства обнаружения и индикации местоположения подвижных объектов, от спутниковой навигационной системы, от метеорологических источников, от мобильных объектов, подлежащих контролю и управлению, от терминалов управления движением обеспечивают:
- отображение на сенсорном экране монитора диспетчера в текущем режиме в реальном масштабе времени обстановки в области наблюдения в 3-D формате, включающее:
- отображение виртуальной трехмерной модели области наблюдения, выполненной, по меньшей мере:
- с отображением на ней рельефа местности, искусственных препятствий, трасс движения и областей маневрирования, включая, по меньшей мере, взлетно-посадочные полосы, рулежные дорожки и места стоянки мобильных объектов;
- с возможностью выбора масштабу, углу обзора и ракурса наблюдения;
- с возможностью принудительной активации индикации, по меньшей мере, маршрутов движения, границ трасс и границ препятствий на модели области наблюдения;
- с автоматическим прекращением индикации указанных маршрутов движения и границ после завершения маневрирования и движения по ним,
- с привязкой указанной модели ее контрольной точкой начала счисления координат в области наблюдения к определенной точке в инерциальной системе координат,
- с возможностью ручного управления ориентацией указанной модели в динамическом режиме относительно ее контрольной точки;
- с масштабированием модели при изменении угла ее обзора и/или ракурса наблюдения диспетчером при выбранной скорости такого изменения;
- отображение виртуальных трехмерных моделей мобильных объектов, ассоциированных через каналы связи и передачи данных с реальными мобильными объектами, находящимися в области наблюдения, выполненных, по меньшей мере:
- с привязкой моделей к системе координат указанной модели области наблюдения,
- с возможностью динамической симуляции движения указанных моделей мобильных объектов в режиме реального времени на основе координатных данных реальных мобильных объектов, находящихся в области наблюдения,
- с масштабированием модели при изменении угла ее обзора и/или ракурса наблюдения соответственно масштабу, углу обзора и ракурса наблюдения модели области наблюдения,
- с возможностью принудительной активации ассоциированной с указанной моделью мобильного объекта блока информации о местоположении и технических данных реального мобильного объекта в режиме реального времени и индикации его статуса,
- с возможностью автоматической смены цвета индикации модели при изменении статуса мобильного объекта;
- отображение виртуальных трехмерных моделей метеорологических объектов потенциальной опасности для движения реальных мобильных объектов в области наблюдения, выполненных с привязкой таких моделей к системе координат указанной модели области наблюдения в режиме реального времени;
- отображение блоков метеорологической информации о текущей обстановке в области аэродрома;
- отображение в текущем динамическом режиме блоков данных об очередности движения и заданных маршрутах движения мобильных объектов в области наблюдения и времени начала и окончания маршрута;
- отображение в динамическом режиме блока информации о направлении и скорости ветра с графической и цифровой его визуализацией около линии старта на взлетно-посадочной полосе;
- путем тактильного воздействия диспетчера на определенную область указанного экрана осуществляют:
- выбор угла обзора, масштаба и ракурса наблюдения и выбор зоны управления на указанной модели области наблюдения;
- активацию на модели области наблюдения индикации заданного маршрута движения мобильных объектов в выбранной зоне управления;
- активацию окна блока данных об очередности движения и маршрута движения мобильных объектов;
- активацию окна блока метеорологической информации;
- активацию визуализации моделей метеорологических объектов потенциальной опасности, если таковые присутствуют в текущий момент времени в зоне управления;
- активацию всплывающих окон блоков информации моделей мобильных объектов, ассоциированных с реальными мобильными объектами и находящихся в выбранной зоне управления и/или прибывающих в зону управления;
- включение свето-сигнальных устройств в области наблюдения;
- осуществляют анализ виртуальной реальности по критериям опасности возникновения конфликтных ситуаций между мобильными объектами, находящимися в выбранной зоне управления и/или прибывающими в зону управления, с уточнением статуса каждого мобильного объекта и автоматической индикацией модели мобильного объекта, находящегося в конфликтной ситуации в зоне управления области наблюдения, сигналом красного цвета о запрещении движения, и отсутствием индикации у модели мобильного объекта, не совершающего движения или при его движении по заданному маршруту;
- определяют в динамическом режиме в текущий момент времени местоположение каждого мобильного объекта в системе координат реальной области наблюдения на основе координат виртуальной модели мобильного средства в модели области наблюдения;
- после наступления заданного времени начала движения мобильного объекта по маршруту обеспечивают:
- автоматическое включение цветовой, например желтой, индикации модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса на его обслуживание диспетчером, и автоматическое отключение желтой индикации указанной модели при движении модели по маршруту,
- автоматическое включение другой цветовой индикации, например синей, модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса команды о продолжении движения по маршруту после его остановки на маршруте;
- автоматическое включение другой, отличной от указанных выше, цветовой индикации, например зеленой, модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса о разрешении на взлет;
- осуществляют в ручном режиме управление диспетчером моделями мобильных объектов, находящихся в зоне управления в конфликтной ситуации между ними или остановленных диспетчером на маршруте, путем тактильного воздействия диспетчера на экран, приводящего к вызову на экран всплывающего окна перечня возможных команд управления мобильным объектом для выбора команды, обеспечивающей исключение конфликта, и последующей передачей выбранной команды по каналу связи на мобильный объект и изменение красной индикации модели мобильного объекта на желтую индикацию после выхода мобильного объекта из конфликта;
- обеспечивают в автоматическом режиме прекращение индикации указанных маршрутов движения и указанных границ на модели области наблюдения после завершения маневрирования и движения по ним и отключение соответствующих свето-сигнальных устройств на аэродроме.
2. Способ по п. 1, отличающийся тем, что указанную индикацию осуществляют с поэтапным изменение яркости или насыщенности цвета.
3. Способ по п. 1, отличающийся тем, что указанную индикацию на экране сопровождают звуковыми сигналами в месте размещения диспетчера и/или в кабине транспортного средства.
4. Устройство для осуществления способа по п. 1, выполненное в виде аппаратно-программного средства, содержащего сервер и процессор вычислительного средства, приспособленные для приема, обработки и отображения на сенсорном экране монитора, блоков информации о движении мобильных объектов на аэродроме в области наблюдения, о рельефе местности и искусственных препятствий, о метеорологической обстановке, отличающегося тем, что:
- содержит блок оценки, анализа и визуализации, на основе приема, анализа и систематизации информации от периферийных источников информации, включающих средства наблюдения, размещенные в области наблюдения и в ее окрестностях, источники информации о параметрах, маршрутах и времени перемещения мобильных объектов в области наблюдения и о рельефе местности, средства обнаружения и индикации местоположения подвижных объектов, от спутниковой навигационной системы, от метеорологических источников, от мобильных объектов, подлежащих контролю и управлению, от терминалов управления движением обеспечивающий:
- отображение на сенсорном экране монитора диспетчера в текущем режиме в реальном масштабе времени обстановки в области наблюдения в 3-D формате, включающее:
- отображение виртуальной трехмерной модели области наблюдения, выполненной, по меньшей мере:
- с отображением на ней рельефа местности, искусственных препятствий, трасс движения и областей маневрирования, включая, по меньшей мере, взлетно-посадочные полосы, рулежные дорожки и места стоянки мобильных объектов;
- с возможностью выбора масштабу, углу обзора и ракурса наблюдения;
- с возможностью принудительной активации индикации, по меньшей мере, маршрутов движения, границ трасс и границ препятствий на модели области наблюдения;
- с автоматическим прекращением индикации указанных маршрутов движения и границ после завершения маневрирования и движения по ним,
- с привязкой указанной модели ее контрольной точкой начала счисления координат в области наблюдения к определенной точке в инерциальной системе координат,
- с возможностью ручного управления ориентацией указанной модели в динамическом режиме относительно ее контрольной точки;
- с масштабированием модели при изменении угла ее обзора и/или ракурса наблюдения диспетчером при выбранной скорости такого изменения;
- отображение виртуальных трехмерных моделей мобильных объектов, ассоциированных через каналы связи и передачи данных с реальными мобильными объектами, находящимися в области наблюдения, выполненных, по меньшей мере:
- с привязкой моделей к системе координат указанной модели области наблюдения,
- с возможностью динамической симуляции движения указанных моделей мобильных объектов в режиме реального времени на основе координатных данных реальных мобильных объектов, находящихся в области наблюдения,
- с масштабированием модели при изменении угла ее обзора и/или ракурса наблюдения соответственно масштабу, углу обзора и ракурса наблюдения модели области наблюдения,
- с возможностью принудительной активации ассоциированной с указанной моделью мобильного объекта блока информации о местоположении и технических данных реального мобильного объекта в режиме реального времени и индикации его статуса,
- с возможностью автоматической смены цвета индикации модели при изменении статуса мобильного объекта;
- отображение виртуальных трехмерных моделей метеорологических объектов потенциальной опасности для движения реальных мобильных объектов в области наблюдения, выполненных с привязкой таких моделей к системе координат указанной модели области наблюдения в режиме реального времени;
- отображение блоков метеорологической информации о текущей обстановке в области аэродрома;
- отображение в текущем динамическом режиме блоков данных об очередности движения и заданных маршрутах движения мобильных объектов в области наблюдения и времени начала и окончания маршрута;
- отображение в динамическом режиме блока информации о направлении и скорости ветра с графической и цифровой его визуализацией около линии старта на взлетно-посадочной полосе;
- при тактильном воздействии диспетчера на определенную область указанного экрана обеспечивает возможности осуществления диспетчером:
- выбора угла обзора, масштаба и ракурса наблюдения и выбор зоны управления на указанной модели области наблюдения;
- активации на модели области наблюдения индикации заданного маршрута движения мобильных объектов в выбранной зоне управления;
- активации окна блока данных об очередности движения и маршрута движения мобильных объектов;
- активации окна блока метеорологической информации;
- активации визуализации моделей метеорологических объектов потенциальной опасности, если таковые присутствуют в текущий момент времени в зоне управления;
- активации всплывающих окон блоков информации моделей мобильных объектов, ассоциированных с реальными мобильными объектами и находящихся в выбранной зоне управления и/или прибывающих в зону управления;
- включения светосигнальных устройств в области наблюдения;
- анализ виртуальной реальности по критериям опасности возникновения конфликтных ситуаций между мобильными объектами, находящимися в выбранной зоне управления и/или прибывающими в зону управления, с уточнением статуса каждого мобильного объекта и автоматической индикацией модели мобильного объекта, находящегося в конфликтной ситуации в зоне управления области наблюдения, сигналом красного цвета о запрещении движения, и отсутствием индикации у модели мобильного объекта, не совершающего движения или при его движении по заданному маршруту;
- определение в динамическом режиме в текущий момент времени местоположения каждого мобильного объекта в системе координат реальной области наблюдения на основе координат виртуальной модели мобильного средства в модели области наблюдения;
- после наступления заданного времени начала движения мобильного объекта по маршруту:
- автоматическое включение цветовой, например желтой, индикации модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса на его обслуживание диспетчером, и автоматическое отключение желтой индикации указанной модели при движении модели по маршруту,
- автоматическое включение другой цветовой индикации, например синей, модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса команды о продолжении движения по маршруту после его остановки на маршруте;
- автоматическое включение другой, отличной от указанных выше, цветовой индикации, например зеленой, модели мобильного объекта на основе получения от мобильного объекта по цифровому каналу связи запроса о разрешении на взлет;
- управление диспетчером в ручном режиме моделями мобильных объектов, находящихся в зоне управления в конфликтной ситуации между ними или остановленных диспетчером на маршруте, путем тактильного воздействия диспетчера на экран, приводящего к вызову на экран всплывающего окна перечня возможных команд управления мобильным объектом для выбора команды, обеспечивающей исключение конфликта, и последующей передачей выбранной команды по каналу связи на мобильный объект и изменение красной индикации модели мобильного объекта на желтую индикацию после выхода мобильного объекта из конфликта;
- в автоматическом режиме прекращение индикации указанных маршрутов движения и указанных границ на модели области наблюдения после завершения маневрирования и движения по ним и отключение соответствующих светосигнальных устройств на аэродроме.
5. Устройство по п. 4, отличающееся тем, что указанную цветовую индикацию обеспечивают с поэтапным изменением яркости или насыщенности цвета.
6. Устройство по п. 4, отличающееся тем, что обеспечивают сопровождение указанной индикации на экране звуковыми сигналами в месте размещения диспетчера и/или в кабине транспортного средства.
| US 6144905 A, 07.11.2000 | |||
| JP 2004145741 A, 20.05.2004 | |||
| НУЛЕВОЙ РАДИОМЕТР | 1996 |
|
RU2124213C1 |
| СПОСОБ И СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНЫМ ДВИЖЕНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ В ПРЕДЕЛАХ УСТАНОВЛЕННОЙ ЗОНЫ АЭРОДРОМА | 2012 |
|
RU2521450C2 |
| US 8019529 B1, 13.09.2011 | |||

