Предлагаемое изобретение относится к области точного приборостроения и может быть использовано в составе навигационных комплексов.
Рассматривается корабельная навигационная система, построенная на двух электростатических гироскопах (ЭСГ) с карданным съемом информации об угловом положении векторов кинетического момента (ВКМ) роторов ЭСГ относительно объекта (корабля). Обычно в навигационной системе, построенной на ЭСГ, начальное направление ВКМ устанавливается следующим: одного - по оси Мира (полярный ЭСГ), второго - в плоскости Земного экватора (экваториальный ЭСГ) (см. В.З.Гусинский и др. «Использование информационной избыточности в инерциальных навигационных системах на свободных гироскопах», сб. докладов на III Санкт-Петербургской конференции по интегрированным навигационным системам. 1996 г.).
Известен способ повышения точности полярного ЭСГ путем ориентации ВКМ таким образом, чтобы видимое движение было минимально (патент РФ №2308004). Способ включает установку ЭСГ в двухосный гироориентатор таким образом, чтобы при запуске гироскопа ось его ротора была ориентирована близко к направлению оси Мира, приведение гироориентатора в рабочий режим, измерение углов поворота корпуса гироскопа в ортогональной системе координат, связанных с Землей, отсчитываемых в плоскости, перпендикулярной оси Мира, и последующую установку оси симметрии корпуса гироскопа, при которой видимое движение этой оси в системе координат, связанной с Землей, минимально (установку в равновесное положение). В этом случае нет необходимости определять раздельно коэффициенты модели ухода (КМУ), обозначенные в патенте РФ №2308004 (принятом за прототип) индексами n0, n1, m0, так как при такой установке корпуса гироскопа нет нарастающих со временем погрешностей определения координат места β и γ.
Однако при всеширотном плавании корабля необходима корректировка равновесного положения, так как оно зависит от широты места (из патента


где Ω - частота вращения Земли, φ0 - широта места).
Корректировка равновесного положения сопряжена с выводом из обработки показаний полярного гироскопа, знания широты места от постороннего источника, проведения операций выставки оси ротора в новое положение. Все это усложняет использование полярного гироскопа в корабельной навигационной системе при всеширотном плавании.
Задачей изобретения является повышение точности корабельной навигационной системы на ЭСГ при всеширотном плавании.
Поставленная задача решается тем, что во время калибровки полярного гироскопа определяются КМУ n0 и n1.
В патенте РФ №2308004 приведена модель ухода ротора полярного гироскопа:

где ωx, ωy - составляющие скорости ухода ротора по осям Х и У, связанным с ротором, определяемые из выражений:
Там же приведены выражения ошибок определения координат места из-за невозможности разделения коэффициентов n0 и n1.
Так, по координате β

где β0, γ0 - значения β, и γ при t=0;
t - время.
Подставив выражения (1) в (3), получим

при t=0 Δβ=0;
при  (24 часа)
(24 часа) 
Если обозначить β=β1 при 
то Δβ=β1-β0 и из (5)

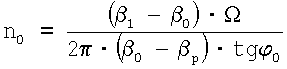
Из выражения (2)
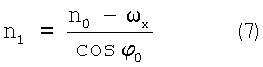
Таким образом, если определена величина βp, известна широта φ0, измерены значения β0 и β1, из выражений (6) и (7) определяются величины n0 и n1.
Из (6) следует, что величина β0 должна отличаться от βравн (например, в 3-5 раз).
Последовательность операций предлагаемого способа определения величин n0 и n1:
- приведение гироориентатора в рабочий режим;
- определение составляющих скорости ухода ротора по осям Х и У (ωx, ωy) и направления оси симметрии корпуса полярного гироскопа (βp, γp), при котором видимое движение этой оси в системе координат, связанной с Землей, минимально;
- вычисление ωx и ωy;
- выключение следящих систем гироориентатора и системы автокомпенсации;
- разворот внутреннего кольца гироориентатора на угол, в 3-5 раз больший угла
βравн, включение демпфирующей катушки;
- ожидание совмещения оси ротора с осью симметрии корпуса;
- выключение демпфирующей катушки;
- включение следящих систем гироориентатора и системы автокомпенсации;
- измерение углового положения внутреннего кольца, β0;
- через 24 часа повторное измерение положения внутреннего кольца, β1;
- вычисление величин n0 и n1 по формулам:
- введение величин n0 и n1 в уравнения программного движения полярного гироскопа.
Реализация этого способа позволяет повысить точность корабельной навигационной системы на ЭСГ.
Технико-экономическая эффективность изобретения заключается в повышении точности корабельной навигационной системы.
В связи с отсутствием сведений о потребностях страны в количестве навигационных систем на ЭСГ экономический эффект изобретения подсчитать не представляется возможным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2308004C1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ УХОДОВ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2008 |
|
RU2386109C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ (КОМПАСИРОВАНИЯ) | 2005 |
|
RU2300078C1 |
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2571199C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НОМИНАЛЬНОЙ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2004 |
|
RU2269745C1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ УХОДОВ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2005 |
|
RU2296298C1 |
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2550592C1 |
| СПОСОБ ПРИВЕДЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА (ЭСГ) В РАБОЧИЙ РЕЖИМ | 2001 |
|
RU2187787C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) | 1996 |
|
RU2114395C1 |
Изобретение относится к области прецизионного приборостроения и может быть использовано при производстве и эксплуатации инерциальных систем на электростатических гироскопах. Сущность изобретения заключается в определении во время калибровки полярного электростатического гироскопа (ЭСГ) коэффициентов модели ухода, зависящих и не зависящих от широты места. Изобретение позволяет повысить точность корабельной навигационной системы на ЭСГ при всеширотном плавании.
Способ коррекции программного движения полярного электростатического гироскопа (ЭСГ) корабельной навигационной системы, содержащей два ЭСГ с демпфирующей нутационные колебания катушкой в каждом гироскопе с магнитной осью, направленной по оси симметрии корпуса гироскопа, при этом корпус гироскопа установлен в систему автокомпенсации с осью, направленной по оси симметрии корпуса гироскопа, каждый гироскоп установлен в двухосный гироориентатор, кольца которого управляются от сигналов двухкоординатной оптико-электронной системы слежения за угловым положением оси ротора, ось ротора полярного гироскопа при его запуске ориентирована близко к направлению оси Мира, а модель ухода ротора полярного гироскопа имеет вид ωx=n0-n1cosφ0; ωy=m0, где ωx и ωy - составляющие скорости ухода ротора по осям Х и У, связанным с ротором; n0, n1, m0 - коэффициенты модели ухода, φ0 - широта места, заключающийся в определении направления оси симметрии корпуса полярного гироскопа, в том числе угла разворота внутреннего кольца гироориентатора βp, при котором видимое движение этой оси в системе координат, связанной с Землей, минимально, определение составляющих ωx, ωy скорости ухода ротора по осям Х и У, связанных с ротором, приведении навигационной системы в рабочий режим, выключении следящих систем гироориентатора и системы автокомпенсации, развороте колец гироориентатора, отличающийся тем, что внутреннее кольцо гироориентатора разворачивают на величину угла, в 3-5 раз большую величин углов, при которых видимое движение оси симметрии корпуса гироскопа минимально, включают демпфирующую катушку на время, достаточное для совмещения оси ротора гироскопа с осью симметрии его корпуса, выключают демпфирующую катушку, включают следящие системы гироориентатора и систему автокомпенсации, измеряют угловое положение внутреннего кольца β0, через 24 ч повторно измеряют положения внутреннего кольца β1, после чего производят вычисление величин коэффициентов n0 и n1 прецессионного уравнения движения вектора кинетического момента ротора полярного гироскопа по формулам: 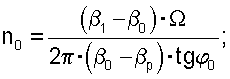
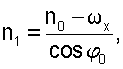 где Ω - скорость вращения Земли, и вводят величины этих коэффициентов в уравнение программного движения полярного гироскопа.
где Ω - скорость вращения Земли, и вводят величины этих коэффициентов в уравнение программного движения полярного гироскопа.
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2308004C1 |
| СПОСОБ ПРИВЕДЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА (ЭСГ) В РАБОЧИЙ РЕЖИМ | 2001 |
|
RU2187787C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193162C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ВЕКТОРА КИНЕТИЧЕСКОГО МОМЕНТА НЕКОНТАКТНОГО ГИРОСКОПА | 1993 |
|
RU2065134C1 |
| US 4654582 A, 31.03.1987 | |||
| Устройство для управления контуром регулирования | 1985 |
|
SU1314304A1 |

