Изобретение относится к области прецизионного приборостроения и может быть использовано при производстве и эксплуатации инерциальных навигационных систем на электростатических гироскопах (ЭСГ) с тонкостенным ротором, поверхность которого выполнена в форме вытянутого к полюсам эллипсоида.
Известен способ нахождения расчетным путем величины разности осей такого эллипсоида, чтобы при вращении с номинальной частотой форма его поверхности под действием центробежных сил стала сферической. Способ описан в статье Ю.Г.Мартыненко и В.В.Подалкова «Асферизация полого ротора электростатического гироскопа» (сборник «Гироскопия и навигация», выпуск 2, 1997 год).
Дальнейшая эксплуатация гироскопа проводится при расчетной частоте вращения ротора. Данный способ принят в качестве прототипа предлагаемого изобретения.
Недостатком такого способа является то, что расчет не учитывает ряд факторов, влияющих на точность определения частоты вращения ротора, при которой он нечувствителен к изменению пондеромоторных сил. К этим факторам следует отнести:
- разброс входящих в расчетные формулы параметров материала ротора (плотности, модуля упругости и др.);
- поле допусков при изготовлении ротора;
- влияние на точность ЭСГ высших гармоник формы поверхности ротора.
Все эти факторы снижают потенциальную точность ЭСГ, т.к. несовпадение формы поверхности ротора со сферой приводит к появлению момента от действия пондеромоторных сил, направленных по нормали к поверхности, и, следовательно, к возникновению уходов гироскопа.
Известно (монография Ю.Г.Мартыненко «Движение твердого тела в электрических и магнитных полях», Москва, «Наука», 1998 год), что при линейном смещении несферического ротора ЭСГ относительно электродов подвеса изменяется его скорость ухода вследствие перераспределения по поверхности пондеромоторных сил. Если при линейном смещении ротора изменения скорости ухода нет, следует считать, что ЭСГ инвариантен к изменению пондеромоторных сил, т.е. ротор такого ЭСГ интегрально сферический.
Задачей настоящего изобретения является определение частоты вращения ротора, при которой он становится интегрально сферическим (номинальной частоты вращения), что уменьшает уводящие моменты от пондеромоторных сил, а следовательно, повышает точность гироскопа.
Поставленная задача решается последовательностью операций:
1. ЭСГ устанавливают в прибор, позволяющий определять скорость ухода ротора (например, в гироориентатор), так, чтобы ось вращения ротора находилась в плоскости Земного экватора.
2. Ротор взвешивают в вакуумной камере при помощи пространственной системы подвеса и разгоняют до расчетной частоты вращения f1.
3. Прибор, в который установлен ЭСГ, приводят в рабочий режим.
4. Определяют скорость ухода ротора n11 по накопленному углу вплоскости Земного экватора.
5. Смещают ротор в вакуумной камере вдоль оси, расположенной по оси вращения ротора, введением дополнительного электрического напряжения на вход следящей системы координаты подвеса по этой оси.
6. Определяют скорость ухода ротора n12.
7. Разгоняют ротор до частоты вращения f2.
8. Определяют скорость ухода ротора n21.
9. Снимают дополнительное электрическое напряжение.
10. Определяют скорость ухода ротора n22.
11. Вычисляют номинальную частоту вращения ротора, при которой он становится интегрально сферическим, по формуле:

12. Доводят частоту вращения ротора до номинальной.
Вывод формулы поясняется чертежом, где обозначено:
f1 - расчетная частота вращения ротора;
f2 - частота вращения ротора после разгона (торможения);
fн - частота вращения ротора, при которой он становится интегрально сферичным;
A, B, C, D, E - вершины треугольников;
(n12-n11) - разность скоростей ухода ротора после и до линейного смещения на частоте вращения ротора f1;
(n22-n21) - разность скоростей ухода ротора после и до линейного смещения на частоте вращения ротора f2.
Из подобия треугольников ABD и АСЕ:
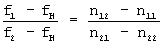
Решая эту пропорцию, получим вышеприведенную формулу.
На предприятии ЦНИИ «Электроприбор» предлагаемое техническое решение осуществлено.
ЭСГ устанавливается в двухосный гиростабилизатор, ротор ЭСГ взвешивается в вакуумной камере с помощью трехосной следящей системы, раскручивается до расчетной частоты вращения (f1), определяемой конструкторской документацией, при помощи демпфирующей катушки ось ротора выставляется в плоскость Земного экватора. Затем включаются следящие системы кардановых колец, наблюдается движение ротора и определяется по накопленному углу скорость ухода на расчетной частоте вращения (n11). Далее ротор смещается вдоль оси вращения, с помощью дополнительного электрического напряжения, вводимого в координату следящей системы подвеса ротора, управляющую его линейным перемещением вдоль оси вращения, и снова определяется скорость ухода на расчетной частоте вращения (n12).
Следующей операцией ротор разгоняется до частоты вращения выше расчетной (f2), проводится измерение скорости ухода ротора (n21) на частоте выше расчетной, после чего дополнительное электрическое напряжение снимается и вновь определяется скорость ухода ротора (n22).
По формуле (1) находится номинальная частота вращения ротора (fн) и частота вращения ротора доводится до номинальной (fн).
Реализация этого способа в ЦНИИ "Электроприбор" позволила повысить точность ЭСГ в 3-5 раз.
Технико-экономическая эффективность изобретения заключается в повышении точности ЭСГ.
В связи с отсутствием сведений о потребностях страны в количестве таких гироскопов экономический эффект изобретения подсчитать не представляется возможным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ изготовления ротора электростатического гироскопа | 2024 |
|
RU2837483C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОЛОГО РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1994 |
|
RU2116622C1 |
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2308004C1 |
| СПОСОБ ИСПЫТАНИЙ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА НА УДАРНОЕ ВОЗДЕЙСТВИЕ | 2006 |
|
RU2316745C1 |
| СПОСОБ КОРРЕКЦИИ ПРОГРАММНОГО ДВИЖЕНИЯ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2386106C1 |
| СПОСОБ ПРИВЕДЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА (ЭСГ) В РАБОЧИЙ РЕЖИМ | 2001 |
|
RU2187787C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВЕСОМ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2017 |
|
RU2640967C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ СОЕДИНИТЕЛЬ | 2009 |
|
RU2393513C1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ УХОДОВ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2008 |
|
RU2386109C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1999 |
|
RU2153649C1 |
Изобретение относится к области прецизионного приборостроения и может быть использовано при производстве и эксплуатации инерциальных навигационных систем на электростатических гироскопах. Сущность изобретения: по результатам изменений уходов ротора гироскопа на двух частотах вращения ротора при двух положениях ротора в вакуумной камере определяется номинальная частота вращения ротора, при которой он становится интегрально сферическим (номинальная частота вращения). Изобретение позволяет уменьшить влияние на уходы ротора электростатического гироскопа таких факторов, как нестабильность следящих систем подвеса, заряд ротора, погрешность следящих систем списывания углового положения, что повышает точность гироскопа. 1 ил.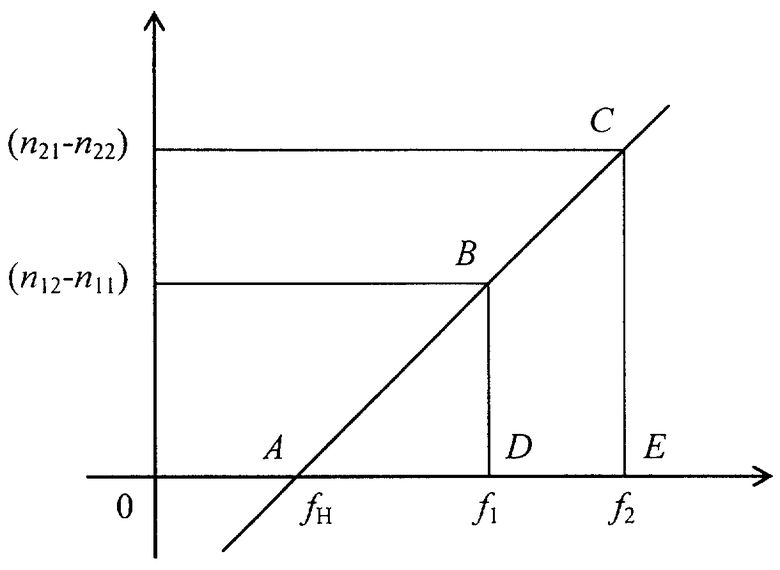
Способ определения номинальной частоты вращения ротора электростатического гироскопа, содержащего тонкостенный ротор, внешняя поверхность которого выполнена в форме вытянутого к полюсам эллипсоида вращения с определенной расчетным путем величиной разности осей эллипсоида, заключающийся в том, что электростатический гироскоп устанавливают в прибор, позволяющий определять скорость ухода ротора, ось вращения ротора выставляют в плоскость Земного экватора, ротор взвешивают в вакуумной камере при помощи пространственной следящей системы подвеса, осуществляют разгон ротора до расчетной частоты вращения f1, после приведения прибора, в котором установлен гироскоп, в рабочий режим определяют скорость ухода n11 по накопленному углу в плоскости Земного экватора, отличающийся тем, что ротор смещают по направлению оси вращения введением дополнительного электрического напряжения на вход следящей системы координаты подвеса, расположенной вдоль оси вращения ротора, измеряют скорость ухода ротора n12, разгоняют ротор до частоты вращения f2, измеряют скорость ухода n21, снимают дополнительное электрическое напряжение, измеряют скорость ухода ротора n22, определяют номинальную частоту вращения ротора по формуле

и доводят частоту вращения ротора до номинальной.
| МАРТЫНЕНКО Ю.Г | |||
| Движение твердого тела в электрических и магнитных полях, М., Наука, 1998, с.112-115 | |||
| МАРТЫНЕНКО Ю.Г | |||
| Асферизация полого ротора электростатического гироскопа | |||
| Гироскопия и навигация, 1997, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ПРИВЕДЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА (ЭСГ) В РАБОЧИЙ РЕЖИМ | 2001 |
|
RU2187787C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193162C1 |
| US 3906804 A, 23.09.1975 | |||
| US 3742769 A, 03.07.1973. | |||

