Изобретение относится к способам обработки радиолокационной информации и может быть использовано для формирования представительных баз данных (БД), требуемых для создания систем распознавания наземных и надводных объектов на радиолокационных изображениях (РЛИ), полученных в режиме синтеза апертуры (РСА).
В задачах создания систем распознавания остро стоит вопрос количества и качества обучающих примеров в задачах построения систем распознавания РЛИ, получаемых радиолокационными станциями (РЛС) с РСА [1-9]. Имеющиеся натурные данные фрагментарны и представлены в недостаточном для обучения сложных систем распознавания количестве. Особенно это касается РЛИ техники сил вероятного противника, доступ к которой, для получения полной базы данных разноракурсных РЛИ, по понятным причинам, ограничен. Получение натурных РЛИ для спектра интересующей техники в необходимом для обучения количестве затратно, как по организационным соображениям, так и финансово, и потому практически невозможно в обозримом будущем.
Одним из вариантов решения проблемы нехватки обучающих эталонов является получение имитационных РЛИ в необходимом для построения систем распознавания количестве и качестве.
В ряде работ [11-16] предпринимались попытки создавать представительные БД эталонов для обучения систем распознавания, но в них либо пытались учесть всю возможную физику [11-14], либо базировались на предельно упрощенном представлении реального объекта [15, 16]. В первом случае подход приводит к переусложненным моделям, требующих таких вычислительных затрат, что построение необходимого количества эталонов для обучения систем распознавания становится неосуществимым в разумные сроки. Во втором случае методы базируются на предельно упрощенном представлении реального объекта, что не позволяет строить эталоны достаточной степени близости к реальным.
Существует способ [17] имитации радиосигнала, отраженного от пространственно распределенной динамической радиофизической сцены, в реальном времени, принятый за ближайший аналог. Способ заключается в том, что задаются координаты местоположения и параметры движения приемной и передающей радиотехнических систем с учетом диаграмм направленности их антенн определяются границы области взаимодействия радиоизлучения с участком рассеивающей поверхности, которая аппроксимируется элементарными площадками-фацетами, после чего с учетом параметров соответствующей модели рассеивания и различных метеоусловий, рефракции, зон затенения, движения участников сцены и с последующим вычислением угла падения радиолуча и удельной ЭПР для каждого фацета создается массив фацетов, одновременно видимых с позиции передающей и приемной антенн, которые затем упорядочиваются и сортируются таким образом, что каждому фиксированному моменту времени приема соответствуют парциальные сигналы группы фацетов с разницей задержек распространения, не превышающей половину величины разрешающей способности приемного устройства, затем для каждой из сформированных групп фацетов с учетом задержек парциальных сигналов фацетов, их доплеровских смещений частоты, затуханий, производится расчет их комплексных коэффициентов рассеивания и находится их векторная сумма, от которой вычисляется обратное преобразования Фурье, в результате чего строится последовательность комплексных отсчетов импульсных характеристик групп фацетов, определяющих комплексные отсчеты импульсной характеристики радиофизической сцены, путем их свертки с последовательностью отсчетов исходного радиосигнала формируется имитируемый эхо-сигнала и повторяются все описанные выше операции на интервале имитационного моделирования в соответствии с динамикой развития радиофизической сцены.
Основными недостатками данного способа для решения задачи быстрого построения РЛИ являются:
- во-первых, невозможность создания сцены с детальными объектами наземной инфраструктуры и техники из-за использования фацетов с заданной шероховатостью, размеры которых много превышают элемент разрешения;
- во-вторых, производится расчет отражений лишь от больших участков поверхности земли, в то время как для получения РЛИ техники и металлических конструкций требуется учет отражений от острых кромок;
- в-третьих, моделирование отражений от детализированной сцены, содержащей большое количество фацетов, неизбежно вычислительно затратно, что дополнительно усугубляется необходимостью расчета каждого такта зондирования в процессе имитации всего процесса синтезирования апертуры;
- в-четвертых, получение синтезированных РЛИ в реальном режиме времени (временные задержки имитации не оказывают влияния на режимы и характеристики функционирования радиотехнических систем при обработке синтезированного сигнала) возможно только для больших элементов разрешения.
Таким образом, все вышеуказанные недостатки ближайшего аналога влияют на скорость построения имитационного РЛИ, одновременно с этим, не позволяют моделировать отражение от металлических конструкций достаточного качества.
Достигаемым техническим результатом заявляемого изобретения является быстрое построение имитационного РЛИ по трехмерной модели цели без указанных недостатков ближайшего аналога.
Указанный результат достигается за счет того, что в известном способе производят считывание всех фацетов модели, разбиение модели на элементарные фацеты, поиск затененных фацетов, расчет амплитуд отраженных сигналов от видимых фацетов и формирование матрицы РЛИ, согласно изобретению, 3D-модель цели разбивают на элементарные фацеты со стороной меньше элемента разрешения, формируют 3D-модель подстилающей поверхности и производят объединение ее с 3D-моделью цели, в дополнение к амплитудам отраженных сигналов от фацетов производят расчет отражений от образуемых ими кромок и формирование матрицы РЛИ за счет суммирования отраженных сигналов с учетом фазы в каждом элементе разрешения и свертки сформированной матрицы с импульсной характеристикой зондирующего сигнала.
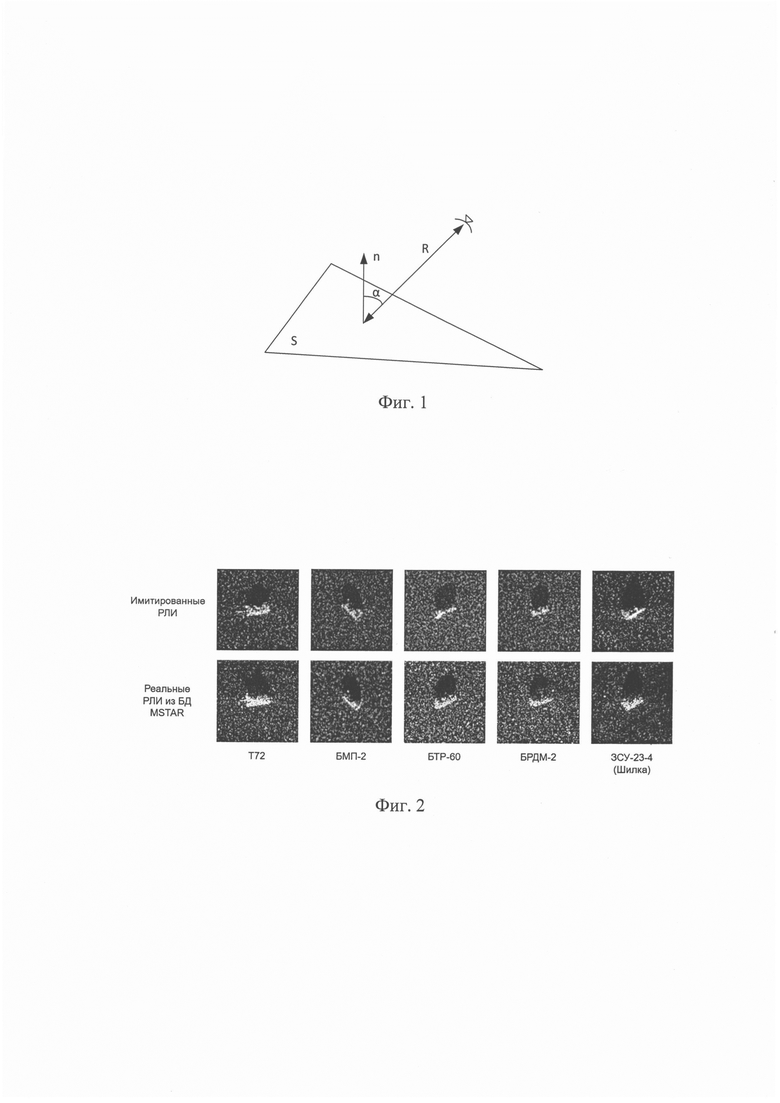
Сущность заявляемого способа поясняется фигурами 1 и 2, где показаны угол, отраженный от фацета, и пример имитированных и реальных РЛИ наземной техники, соответственно.
Разработанный способ быстрого имитирования радиолокационных изображений техники заключается в следующем.
Производится считывание всех фацетов, поворот и центрирование 3D-модели цели, которая разбивается на элементарные фацеты со стороной меньше элемента разрешения. Затем, создается общая 3D-модель за счет формирования 3D-модели подстилающей поверхности и объединения ее с 3D-моделью цели. Производится поиск затененных фацетов. Производится расчет комплексных амплитуд отраженных сигналов от видимых фацетов и образуемых ими кромок в каждом элементе разрешения с учетом дальности до фацета. Полученные комплексные амплитуды отраженных сигналов суммируются.
Для обеспечения высокой скорости вычислений применяется феноменологический подход, в рамках которого полагается, что носитель РЛС с РСА двигается равномерно прямолинейно и, после синтезирования апертуры, формирует виртуальную диаграмму направленности, ширина главного лепестка которой равна заданному размеру элемента разрешения имитируемого РЛИ по азимуту. Таким образом, этап синтеза апертуры опускается и сразу моделируется результирующая виртуальная диаграмма направленности РСА. При этих допущениях 3D-модель облучается виртуальным узким лучом, перпендикулярным направлению движения носителя, с дискретным шагом, равным заданному элементу разрешения по азимуту, формируя некое облучаемое направление. В каждом таком направлении проводится дискретизация по дальности с шагом, равным заданному элементу разрешения по дальности. Все пространство разбивается, таким образом, по азимуту и дальности на некие облучаемые объемы, в которые попадают фацеты 3D-модели.
Отражение от фацетной модели происходит как от фацетов, так и от ребер.
Отражение от каждого n фацета вычисляется по (1).

где Sn - площадь фацета, Kn - коэффициент отражения, характеризующий электропроводящие свойства материала фацета, an - угол между нормалью фацета и лучом, направленного из центра фацета на РЛС (фигура 1), Rn -расстояние от РЛС до центра фацета, λ - длина волны зондирующего сигнала.
Для увеличения скорости вычислений протяженные плоские участки объекта не разбиваются на фацеты, со стороной меньше элемента разрешения. Отражения от таких фацетов вычисляется по формулам, приведенным в [19].
После расчета отражений производится формирование матрицы РЛИ. Суммирование производится с учетом фазы отражений от фацетов и их ребер в каждом облучаемом объеме (объеме суммирования), которое формирует значения матрицы РЛИ.

где Мху - элементы матрицы имитационного РЛИ [м2], Y - диапазон по дальности, X - диапазон по азимуту,  - комплексные амплитуды отраженных сигналов от n фацетов, попадающих в объем суммирования отраженных сигналов [Δх, Δу] рассчитывается, согласно (1),
- комплексные амплитуды отраженных сигналов от n фацетов, попадающих в объем суммирования отраженных сигналов [Δх, Δу] рассчитывается, согласно (1),  - комплексные амплитуды отраженных сигналов от т ребер, попадающих в объем суммирования отраженных сигналов [Δх, Δу], рассчитывается согласно физической теории дифракции [19, 20].
- комплексные амплитуды отраженных сигналов от т ребер, попадающих в объем суммирования отраженных сигналов [Δх, Δу], рассчитывается согласно физической теории дифракции [19, 20].
Далее проводится свертка сформированной матрицы с импульсной характеристикой зондирующего сигнала для получения максимально приближенного к реальному физическому РЛИ. Это позволяет в достаточной степени учесть интерференцию отраженных сигналов от фацетов 3D-модели.
Новизна предлагаемого способа состоит в применении феноменологического подхода к имитированию РЛИ, который предоставляет возможность построения за разумное время представительных баз данных РЛИ, достаточного качества для построения систем распознавания, основанных на искусственных нейронных сетях.
Открытый доступ к американской БД натурных РЛИ советской наземной техники MSTAR [20, 21] позволил подтвердить качество имитируемых РЛИ (фигура 2).
Для оценки среднего времени имитации РЛИ была сформирована БД, аналогичная базе MSTAR: размеры изображений 128×128 пикселей, 5 классов целей, разрешение 0.3 м/пикс, шаг по ракурсу цели 0.5°. Количество фацетов в каждой 3D-модели не менее 1 млн. На построение БД из 3600 РЛИ было затрачено 56,4 минут чистого времени (в среднем 0.94 сек. на одно изображение). Имитация РЛИ проводилась на ЭВМ производительностью 248 GFlops.
Предложенный способ быстрой имитации РЛИ позволяет получать пригодные для обучения нейронных сетей БД для всего спектра наземной и надводной техники, охватывающих все ракурсы обзора за разумное время.
Для проверки адекватности было проведено обучение сверточной нейронной сети на имитированных РЛИ семи классов наземной военной техники, представленных в открытой части БД MSTAR. Вероятность правильного распознавания реальных РЛИ из БД MSTAR составила 82.5%.
Источники информации:
1. L.M. Novak, G.J. Owirka, W.S. Brower, A.L. Weaver, The Automatic Target-Recognition System in SAIP, The Lincoln Laboratory Journal Volume 10, Number 2, 1997;
2. D.A.E. Morgan, "Deep convolutional neural networks for ATR from SAR imagery," Proc. SPIE, vol. 9475, pp. 94750F-94750F-13, 2015;
3. K. He, X. Zhang, S. Ren, J. Sun, Deep Residual Learning for Image Recognition, arXiv: 1512.03385vl [cs.CV] 10 Dec 2015;
4. M. Wilmanski, C. Kreucher, and J. Lauer, "Modern approaches in deep learning for SAR ATR," Proc. SPIE, vol. 9843, pp. 98430N-98430N-10, 2016;
5. J. Ding, B. Chen, H. Liu, and M. Huang, "Convolutional neural network with data augmentation for SAR target recognition," IEEE Geoscience and Remote Sensing Letters, vol. 13, no. 3, pp. 364-368, 2016;
6. S. Chen, H. Wang, F. Xu, and Y.Q. Jin, "Target classification using the deep convolutional networks for SAR images," IEEE Transactions on Geoscience and Remote Sensing, vol. 54, no. 8, pp. 4806-4817, 2016;
7. K. Du, Y. Deng, R. Wang, T. Zhao, and N. Li, "SAR ATR based on displacement-and rotation-insensitive CNN," Remote Sensing Letters, vol.7, no.9, pp. 895-904, 2016;
8. H. Furukawa, Deep Learning for Target Classification from SAR Imagery, The Institute Of Electronics, Information And Communication! Engeneers, IEICE Technical Report SANE2017-30 (2017-08), arXiv:1708.07920vl [cs.CV] 26 Aug 2017;
9. Z. Cui, C. Tang, Z. Cao, N. Liu, D-ATR for SAR Images Based on Deep Neural Networks, Remote Sens. 2019, 11, 906; doi:10.3390/rsl 1080906, www.mdpi.com/journal/remotesensing;
10. D. Malmgren-Hansen, R. Engholm, M. Ostergaard Pedersen, Training Convolutional Neural Networks for Translational Invariance on SAR ATR. In Proceedings of EUSAR 2016: 11th European Conference on Synthetic Aperture Radar (pp. 459-462). IEEE, 2016;
11. A.H. Тонких, Математическое моделирование и анализ радиолокационных портретов распределенных объектов, формируемых радиолокационной станцией с синтезированной апертурой. Военно-Воздушная Инженерная Академия, автореферат диссертации на соискание ученой степени кандидата технических наук, Москва, 2005;
12. А.Б. Борзов, Р.П. Быстров, А.В. Соколов, Анализ радиолокационных характеристик объектов сложной пространственной конфигурации, ЗЦНИИ МО РФ, Институт радиотехники и электроники РАН, «Журнал радиоэлектроники», №1, 1998;
13. Д.А. Жердев, Е.Ю. Минаев, В.В. Прокудин, В.А. Фурсов, Технология распознавания радиолокационных изображений с формированием эталонов путем моделирования, Информационные технологии и нанотехнологии - 2017, Математическое моделирование;
14. A. Bausssard, М. Rochdi, A. Khenchaf, Po/Mec-Based Scattering Model For Complex Objects On A Sea Surface, Progress In Electromagnetics Research, Vol.111, 229-251, 2011;
15. В.В. Разевиг, Комплекс математических моделей и программ для исследования и разработки радиоголографических систем малой дальности. Московский государственный технический университет имени Н.Э. Баумана, диссертация на соискание ученой степени кандидата технических наук, Москва, 2015;
16. С.А. Кулешов, Способ аналитического описания радиолокационных портретов образов объектов // Материалы Международной научно-технической конференции, 21-25 ноября 2016 г., МОСКВА INTERMATIC -2016, часть 5, МИРЭА;
17. Патент RU 2386143. Способ имитации радиосигнала, отраженного от пространственно распределенной динамической радиофизической сцены, в реальном времени. Опубл. 10.04.2010. Патентообладатель: Государственное образовательное учреждение высшего профессионального образования "Ярославский государственный университет им. П.Г. Демидова" (RU);
18. А.Б. Борзов, В.Б. Сучков, В.В. Ахияров, Ю.В. Каракулин, Математическое моделирование характеристик рассеяния объектов локации с импедансной поверхностью, ЖУРНАЛ РАДИОЭЛЕКТРОНИКИ, №2, 2014.
19. П.Я. Уфимцев, Метод краевых волн в физической теории дифракции, «Советское радио», М.: 1962;
20. Т. Ross, S. Worrell, V. Velten, J. Mossing, and M. Bryant, "Standard SAR ATR evaluation experiments using the MSTAR public release data set", Proc. SPIE, vol.3370, pp. 566-573, 1998;
21. Moving and Stationary Target Acquisition and Recognition (MSTAR) Public Release Data // URL: https://www.sdms.afrl.af.mil/datasets/mstar/ (data access 24.03.2018).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИМИТАЦИИ РАДИОСИГНАЛА, ОТРАЖЕННОГО ОТ ПРОСТРАНСТВЕННО РАСПРЕДЕЛЕННОЙ ДИНАМИЧЕСКОЙ РАДИОФИЗИЧЕСКОЙ СЦЕНЫ, В РЕАЛЬНОМ ВРЕМЕНИ | 2008 |
|
RU2386143C2 |
| Способ имитации радиосигнала | 2016 |
|
RU2621329C1 |
| Способ имитации радиосигнала | 2020 |
|
RU2747883C1 |
| СПОСОБ РАСПОЗНАВАНИЯ НАДВОДНЫХ КОРАБЛЕЙ НА ВЗВОЛНОВАННОЙ МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2423722C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОСИГНАЛА, ОТРАЖЕННОГО ОТ ВОЗДУШНОЙ ЦЕЛИ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ, В УСЛОВИЯХ ПАССИВНЫХ И АКТИВНЫХ ПОМЕХ | 2023 |
|
RU2826626C1 |
| СПОСОБ ИМИТАЦИИ РАДИОСИГНАЛА | 2023 |
|
RU2804902C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ СИГНАЛА, ОТРАЖЕННОГО ОТ ЗЕМНОЙ ПОВЕРХНОСТИ, В РЕЖИМЕ КАРТОГРАФИРОВАНИЯ РЕАЛЬНЫМ ЛУЧОМ | 2013 |
|
RU2530544C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ КОРАБЛЕЙ | 2016 |
|
RU2638939C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ НА ИЗОБРАЖЕНИЯХ, ПОЛУЧЕННЫХ РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2018 |
|
RU2698649C1 |
Использование: изобретение относится к способам обработки радиолокационной информации и может быть использовано для быстрого формирования представительного количества исходных данных для обучения систем распознавания наземной и надводной техники на радиолокационных изображениях (РЛИ). Технический результат: повышение скорости построения имитационного РЛИ по трехмерной модели цели. Сущность: в способе производят считывание всех фацетов модели, разбиение модели на элементарные фацеты, поиск затененных фацетов, расчет амплитуд отраженных сигналов от видимых фацетов и формирование матрицы РЛИ, согласно изобретению, 3D-модель цели разбивают на элементарные фацеты со стороной меньше элемента разрешения, формируют 3D-модель подстилающей поверхности и производят объединение ее с 3D-моделью цели, в дополнение к амплитудам отраженных сигналов от фацетов производят расчет отражений от образуемых ими кромок и формирование матрицы РЛИ за счет суммирования отраженных сигналов с учетом фазы в каждом элементе разрешения без этапа синтезирования апертуры и свертки сформированной матрицы с импульсной характеристикой зондирующего сигнала. 2 ил.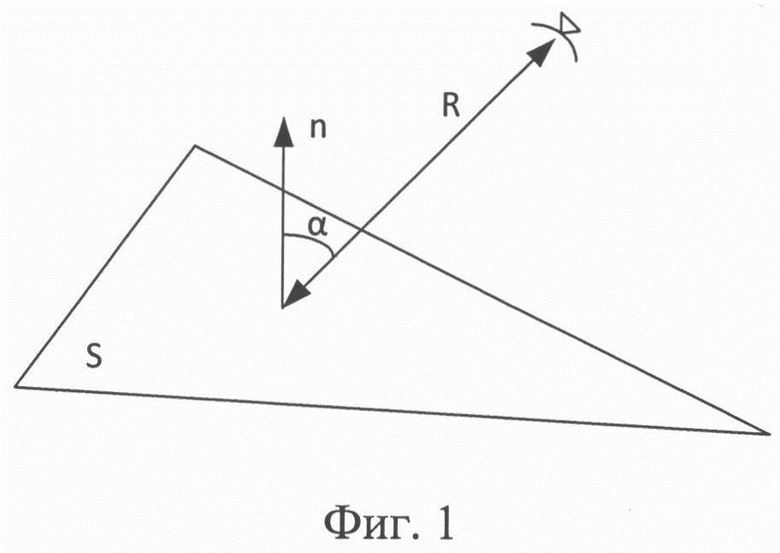
Способ быстрого имитирования радиолокационных изображений (РЛИ), в котором производится считывание всех фацетов модели, разбиение модели на элементарные фацеты, поиск затененных фацетов, расчет амплитуд отраженных сигналов от видимых фацетов и формирование матрицы РЛИ, отличающийся тем, что 3D-модель цели разбивается на элементарные фацеты со стороной меньше элемента разрешения, создается общая 3D-модель за счет формирования 3D-модели подстилающей поверхности и объединения ее с 3D-моделью цели, в дополнение к амплитудам отраженных сигналов от фацетов производится расчет отражений от образуемых ими кромок и формирование матрицы РЛИ за счет суммирования отраженных сигналов с учетом фазы в каждом элементе разрешения без этапа синтезирования апертуры и свертки сформированной матрицы с импульсной характеристикой зондирующего сигнала.
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ | 2010 |
|
RU2422851C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ В РАДИОЛОКАЦИОННОЙ СТАНЦИИ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2012 |
|
RU2511216C1 |
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2023 |
|
RU2806651C1 |
| СПОСОБ ИМИТАЦИИ РАДИОСИГНАЛА, ОТРАЖЕННОГО ОТ ПРОСТРАНСТВЕННО РАСПРЕДЕЛЕННОЙ ДИНАМИЧЕСКОЙ РАДИОФИЗИЧЕСКОЙ СЦЕНЫ, В РЕАЛЬНОМ ВРЕМЕНИ | 2008 |
|
RU2386143C2 |
| EP 3896482 A1, 20.10.2021 | |||
| CN 107103338 A, 29.08.2017 | |||
| Д.А | |||
| Жердев, Е.Ю | |||
| Минаев, В.В | |||
| Прокудин, В.А | |||
| Фурсов, Технология распознавания радиолокационных изображений с формированием эталонов путем моделирования, Информационные технологии и | |||

