Изобретение относится к области радиолокационной техники и может быть использовано при полунатурном моделировании распространения радиоволн с учетом зеркально-диффузного характера рассеяния, возвратно-поступательного движения составных элементов воздушной цели, наличия пассивных и активных помех и многократных переотражений от поверхности искусственных объектов путем обеспечения имитации в реальном времени радиосигнала, отраженного от пространственно-распределенной радиофизической сцены, в качестве которой выступают поверхности искусственных объектов с различными электромагнитными свойствами (металл, стекло, пластик, радиопоглощающие материалы, метаматериалы и т.д.).
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ анализа радиолокационных сигнатур вторичной доплеровской модуляции моделей турбореактивных двигателей (Lim Н., Yoo J.Н., Kim С.Н., Kwon K.I & Myung N.Н., Joint Time-Frequency Analysis of Radar Micro-Doppler Signatures from Aircraft Engine Models // Journal of Electromagnetic Waves and Applications, 2011, №25:8-9, p.1069-1080), заключающийся в том, что задают координаты местоположения радиотехнической системы (РТС), модели турбореактивного двигателя (ТРД) с вращающимися лопатками ступеней компрессора низкого давления (КНД), которую аппроксимируют элементарными площадками-фацетами, характерные размеры, параметры неровностей и электрические свойства которых определяют исходя из требуемой точности синтеза радиосигнала, задают скорость вращения ступеней компрессора модели ТРД Fвр, исходя из требуемой точности синтеза отраженного радиосигнала задают плотность лучей λ/Х, где X - рациональное число, создают матрицу относительной видимости фацетов M(i,j,k), где i=1,2,…,N; j=1,2,…,Na; k=1,2,…,Nr, N - общее число фацетов, Na - число угловых областей, Nr - число фацетов в каждой угловой области, с помощью алгоритма углового разделения (см., например B.C. Kim, К.К. Park, Н.Т. Kim, Efficient RCS Prediction Method Using Angular Division Algorithm // Journal of Electromagnetic Waves and Applications, 2011, №23:1, pp.65-74), лучи ставят в соответствие только к фацетам, видимым с направления излучения, отслеживают каждый из лучей и проверяют их пересечение с фацетами модели ТРД, в случае наличия пересечения с фацетом Ai вычисляют точку пересечения и отраженный луч в соответствии с законом Снеллиуса (см, например, Яворский Б.М., Детлаф А.А., Справочник по физике // М: Наука: Физматлит, 1996, С.449), определяют область Aj распространения отраженного луча путем вычисления углов θ, ϕ в направлении отражения, ставят в соответствие области Aj количество фацетов Ak из матрицы относительной видимости фацетов M(Ai,Aj,Ak), проверяют пересечение луча с Ak фацетами, в случае наличия пересечения с каким-либо из Ak фацетов вычисляют точку пересечения и отраженный луч в соответствии с законом Снеллиуса, в случае отсутствия пересечения переходят к следующему лучу, после окончания отслеживания распространения всех лучей определяют амплитуду отраженного поля, при этом отраженный сигнал представляют как суперпозицию полей рассеяния от каждого отраженного луча, формируют спектрально-доплеровский портрет модели (СДП) ТРД, формируют спектрограмму сигнала от модели ТРД.
Наиболее близким по технической сущности и достигаемому эффекту является устройство, реализующее способ-прототип (Lim Н., Yoo J. Н., Kim С.Н., Kwon K. I & Myung N. Н., Radar Cross Section Measurements of a Realistic Jet Engine Structure with Rotating Parts // Journal of Electromagnetic Waves and Applications, 2011, №25:7, p.999-1008), содержащее в себе полномасштабную модель ТРД с вращающимися лопатками ступеней КНД, соединенную с радиолокационной измерительной системой, которая управляет скоростью вращения лопаток ступеней КНД и системой перемещения ТРД в азимутальной плоскости, секцию с радиопоглощающим материалом (РПМ), которая расположена на половине дистанции между моделью ТРД и радиолокационной измерительной системой для снижения влияния переотражений сигнала от земной поверхности.
Основными недостатками способа-прототипа являются высокие вычислительные затраты вследствие необходимости расчета напряженности электрического поля электромагнитной волны (ЭМВ) (см., например, Борзов А.Б., Быстрое Р.П., Засовин Э.А. Миллиметровая радиолокация: методы обнаружения и наведения в условиях естественных и организованных помех // М.: Радиотехника, 2010, 376 С.), низкая точность имитации отраженного радиосигнала вследствие отсутствия учета влияния зеркально-диффузного характера рассеяния отраженной ЭМВ (см., например, Маковецкий П.В., Васильев В.Г. Виды отражения // Отражение радиолокационных сигналов. Лекции. 1975. С. 3-9) и вследствие отсутствия учета угла падения ЭМВ на плоскость лопаток ступеней КНД ТРД после переотражения в ВЗУ (см., например, Shirman Y. D. Computer Simulation of Aerial Target Radar Scattering, Recognition, Detection, and Tracking // Artech House, 2002, p.52), а также ограниченная функциональность вследствие отсутствия учета влияния пассивных средств РЭП - линз Люнеберга, и активных имитирующих помех (см., например, Сколник М.И. Справочник по радиолокации. Книга 2 // М: Техносфера, 2014, С.1199).
Основными недостатками устройства-прототипа являются недостаточная информативность отраженного сигнала вследствие отсутствия учета угла падения ЭМВ на плоскость лопаток ступеней КНД ТРД (см., например, Shirman Y. D. Computer Simulation of Aerial Target Radar Scattering, Recognition, Detection, and Tracking // Artech House, 2002, p.52), а также ограниченная функциональность вследствие отсутствия учета влияния пассивных средств РЭП - линз Люнеберга, и активных имитирующих помех (см., например, Сколник М.И. Справочник по радиолокации. Книга 2 // М: Техносфера, 2014, С.1199).
Техническим результатом предлагаемого способа является снижение вычислительных затрат на расчет отраженного радиосигнала за счет перехода к расчету мощности лучей отраженной ЭМВ, повышение точности имитации отраженного радиосигнала за счет учета зеркально-диффузного характера рассеяния отраженной ЭМВ и угла падения ЭМВ на плоскость лопаток КНД ТРД после переотражения в ВЗУ, а также расширение функциональных возможностей способа за счет учета влияния пассивных средств РЭП и активных имитирующих помех.
Технический результат в предлагаемом способе достигается тем, что в известном способе анализа радиолокационных сигнатур вторичной доплеровской модуляции моделей турбореактивных двигателей, заключающемся в том, что
1. Задают координаты местоположения радиотехнической системы, модели ТРД с вращающимися лопатками ступеней КНД, которую аппроксимируют элементарными площадками-фацетами, характерные размеры, параметры неровностей и электрические свойства которых определяют исходя из требуемой точности синтеза радиосигнала,
2. Задают скорость вращения лопаток ступеней КНД модели ТРД Fвр,
3. Исходя из требуемой точности синтеза отраженного радиосигнала задают плотность лучей λ/X, где X - рациональное число,
4. Формируют матрицу относительной видимости фацетов M(i,j,k), где i=1,2,…,N; j=1,2,…,Na; k=1,2,…,Nr, N - общее число фацетов, Na - число угловых областей, Nr - число фацетов в каждой угловой области, с помощью алгоритма углового разделения,
5. Лучи ставят в соответствие только к фацетам, видимым с направления излучения,
6. Отслеживают каждый из лучей и проверяют их пересечение с фацетами модели ТРД,
7. В случае наличия пересечения с фацетом Ai вычисляют точку пересечения и отраженный луч в соответствии с законом Снеллиуса,
8. Определяют область Aj распространения отраженного луча путем вычисления углов θ, ϕ в направлении отражения,
9. Ставят в соответствие области Aj массив фацетов Ak из матрицы относительной видимости фацетов М(Ai,Aj,Ak),
10. Проверяют пересечение луча с Ak фацетами массива 8),
11. В случае наличия пересечения с каким-либо из Ak фацетов выполняют процедуру многократного переотражения радиосигнала - возвращаются к действию 6) и отслеживают отраженный луч,
12. В случае отсутствия пересечения перестают отслеживать данный луч и возвращаются к действию 5) для отслеживания следующего луча,
13. После окончания отслеживания распространения всех лучей определяют амплитуду отраженного поля, при этом отраженный сигнал представляют как суперпозицию полей рассеяния от каждого отраженного луча,
14. Формируют СДП модели ТРД, согласно предлагаемому изобретению дополнительно исходя из требуемой точности синтеза радиосигнала задают количество лучей индикатрисы рассеяния (ИР) Nл отраженной ЭМВ, количество лучей диаграммы направленности антенны (ДН) РТС NлPTC, задают начальное местоположение и параметры движения носителя РТС, искусственных воздушных объектов - моделей ложных воздушных целей-источников активных имитирующих помех (ЛВЦ), модели воздушной цели, которая включает в себя модель линзы Люнеберга (ЛЛ), канал воздухозаборного устройства (ВЗУ), модель ТРД с вращающимися лопатками ступеней КНД, соответствующую типу искусственного объекта, модели воздушной цели, ложных воздушных целей, линзы Люнеберга и модель ТРД аппроксимируют элементарными площадками-фацетами, характерные размеры, параметры неровностей и электрические свойства которых определяют исходя из требуемой точности синтеза радиосигнала, задают скорость вращения лопаток ступеней компрессоров ТРД Fвр в соответствии с режимами работы ТРД, которые зависят от параметров движения модели, диаграмму направленности антенны РТС представляют в виде набора лучей внутри пространства, объем которого определяют формой основного и боковых лепестков ДН, центральным принимают луч, совпадающий с направлением оси ДН, разбивают ДН на лучи с равномерным шагом по угловым отклонениям от центрального луча, количество лучей определяют исходя из требуемой точности синтеза радиосигнала, определяют мощность каждого луча в соответствии с коэффициентом усиления ДН РТС для угла между текущим и центральным лучами, после постановки лучу в соответствие элементарной площадки на фацетах фацетных моделей искусственных воздушных объектов или при выполнении процедуры многократного переотражения радиосигнала после вычисления угла падения луча рассчитывают ИР ЭМВ, отраженной от элементарной площадки, выполняют поиск Nл локальных максимумов ИР, определяют угол отражения каждого из Nл лучей, формируют отраженные лучи ИР, мощность которых определяют в соответствии с коэффициентом ослабления ЭМВ для материала фацета и коэффициентом усиления ИР ЭМВ для каждого из лучей, в случае пересечения луча ИР ЭМВ с плоскостью лопаток ступени компрессора низкого давления ТРД выполняется процедура вращения лопаток ступени КНД ТРД при наблюдении из точки излучения отраженного луча, после постановки лучу в соответствие элементарной площадки на фацете лопатки ступени компрессора ТРД, с учетом угла падения луча ИР, величины эффективной поверхности рассеяния (ЭПР) фацета лопатки ступени КНД ТРД, скорости вращения лопаток ступени компрессора ТРД Fвр рассчитывают ИР ЭМВ, отраженной от элементарной площадки, выполняют поиск Nл локальных максимумов ИР, определяют угол отражения каждого из Nл лучей, формируют отраженные лучи ИР, мощность которых определяют в соответствии с коэффициентом ослабления ЭМВ для материала фацета и коэффициентом усиления ИР ЭМВ для каждого из лучей, по окончании отслеживания всех лучей определяют мощность отраженного радиосигнала как суперпозицию мощностей отраженных лучей от планера воздушной цели с ЛЛ, поверхности АЛВЦ, лопаток ступеней КНД ТРД с учетом задержки распространения лучей от антенны РТС до объекта и обратно, формируют СДП воздушной цели с ТРД, сравнивают сформированный расчетный СДП с экспериментальными данными от специализированного стенда и корректируют параметры имитационной модели (скорость вращения лопаток ступеней КНД ТРД Fвр, количество лучей ИР ЭМВ Nл, количество лучей ДН РТС NлPTC, коэффициенты усиления ИР ЭМВ Fi(αn) и другие параметры) в среде математического моделирования.
За счет этого происходит снижение вычислительных затрат на расчет отраженного радиосигнала, повышение точности имитации радиосигнала, отраженного от воздушной цели с ТРД, а также расширение функциональных возможностей способа.
Техническим результатом предлагаемого устройства является повышение информативности отраженного сигнала за счет механического поворота модели ТРД в азимутальной и угломестной плоскостях на величину, соответствующую углу падения луча на плоскость лопаток ступеней КНД ТРД после переотражения в ВЗУ, а также расширение функциональных возможностей устройства за счет введения в конструкцию имитатора пассивных средств РЭП и активных имитирующих помех.
Технический результат в предлагаемом устройстве достигается тем, что в известное устройство измерения ЭПР полномасштабной модели ТРД с вращающимися частями, содержащее в себе радиолокационную измерительную систему, которая управляет скоростью вращения модели ТРД с вращающимися ступенями КНД и системой перемещения ТРД по азимуту, дополнительно введены имитатор сигналов бортовой радиолокационной станции (БРЛС), средство имитации помеховой обстановки - имитатор пассивных средств РЭП и активных имитирующих помех, выполненные на базе SDR-платформы (SDR) (см., например, Dillinger М., Madani K., Alonistioti N., Software defined radio: architectures, systems, and functions // Wiley, 2003. 454 p.), персональная электронно-вычислительная машина (ПЭВМ) с предустановленным программным обеспечением (ПО) - средой математического моделирования (см., например, Пакет прикладных программ MATLAB: [сайт] - URL: https://www.mathworks.com/products/matlab.html (дата обращения: 06.03.2023)), ПО для управления SDR (см., например, Программная библиотека GNU Radio: [сайт] - URL: https://www.gnuradio.org/ (дата обращения 25.02.2023)), ПО для управления работой микроконтроллеров (см., например, Arduino IDE: [сайт] - URL: https://www.arduino.cc/en/software (дата обращения 03.03.2023)), и контроллер управления механизацией модели ТРД, связь между элементами устройства осуществляют по протоколу Universal serial bus (USB) (см., например, USB Specification: [сайт] - URL: https://www.usb.org/documents (дата обращения 12.02.2023)).
За счет этого происходит повышение информативности отраженного сигнала и расширение функциональных возможностей устройства.
Сущность объекта изобретения - способа заключается в том, что дополнительно исходя из требуемой точности синтеза радиосигнала задают количество лучей ИР Nл отраженной ЭМВ, количество лучей диаграммы направленности антенны ДН РТС NлРТС, задают начальное местоположение и параметры движения носителя РТС, искусственных воздушных объектов -моделей ложных воздушных целей-источников активных имитирующих помех, модели воздушной цели, которая включает в себя модель линзы Люнеберга, канал ВЗУ, модель ТРД с вращающимися лопатками ступеней КНД, соответствующую типу искусственного объекта, модели воздушной цели, ложных воздушных целей, линзы Люнеберга и модель ТРД аппроксимируют элементарными площадками-фацетами, характерные размеры, параметры неровностей и электрические свойства которых определяют исходя из требуемой точности синтеза радиосигнала, задают скорость вращения лопаток ступеней компрессоров ТРД Fвр в соответствии с режимами работы ТРД, которые зависят от параметров движения модели, диаграмму направленности антенны РТС представляют в виде набора лучей внутри пространства, объем которого определяют формой основного и боковых лепестков ДН, центральным принимают луч, совпадающий с направлением оси ДН, разбивают ДН на лучи с равномерным шагом по угловым отклонениям от центрального луча, количество лучей определяют исходя из требуемой точности синтеза радиосигнала, определяют мощность каждого луча в соответствии с коэффициентом усиления ДН РТС для угла между текущим и центральным лучами, после постановки лучу в соответствие элементарной площадки на фацетах фацетных моделей искусственных воздушных объектов или при выполнении процедуры многократного переотражения радиосигнала после вычисления угла падения луча рассчитывают ИР ЭМВ, отраженной от элементарной площадки, выполняют поиск Nл локальных максимумов ИР, определяют угол отражения каждого из Nл лучей, формируют отраженные лучи ИР, мощность которых определяют в соответствии с коэффициентом ослабления ЭМВ для материала фацета и коэффициентом усиления ИР ЭМВ для каждого из лучей, в случае пересечения луча ИР ЭМВ с плоскостью лопаток ступени компрессора низкого давления ТРД выполняется процедура вращения лопаток ступени КНД ТРД при наблюдении из точки излучения отраженного луча, после постановки лучу в соответствие элементарной площадки на фацете лопатки ступени компрессора ТРД, с учетом угла падения луча ИР, величины ЭПР фацета лопатки ступени КНД ТРД, скорости вращения лопаток ступени компрессора ТРД Fвр рассчитывают ИР ЭМВ, отраженной от элементарной площадки, выполняют поиск Nл локальных максимумов ИР, определяют угол отражения каждого из Nл лучей, формируют отраженные лучи ИР, мощность которых определяют в соответствии с коэффициентом ослабления ЭМВ для материала фацета и коэффициентом усиления ИР ЭМВ для каждого из лучей, по окончании отслеживания всех лучей определяют мощность отраженного радиосигнала как суперпозицию мощностей отраженных лучей с учетом задержки распространения лучей от антенны РТС до объекта и обратно, формируют СДП воздушной цели с ТРД, сравнивают сформированный расчетный СДП с экспериментальными данными от специализированного стенда и корректируют параметры имитационной модели (скорость вращения лопаток ступеней КНД ТРД Fвр, количество лучей ИР ЭМВ Nл, количество лучей ДН РТС NлPTC, коэффициенты усиления ИР ЭМВ Fi(αn) и другие параметры) в среде математического моделирования.
Сущность объекта изобретения - устройства заключается в том, что дополнительно введены имитатор сигналов БРЛС и средства имитации помеховой обстановки, выполненные на базе SDR-платформы, ПЭВМ с предустановленным ПО - средой математического моделирования, ПО для управления SDR, ПО для управления работой микроконтроллеров и контроллер управления механизацией модели ТРД, связь между элементами устройства осуществляют по протоколу USB.
Этим достигается указанный в изобретении результат.
Работа заявляемого способа имитации радиосигнала, отраженного от воздушной цели с ТРД, в условиях пассивных и активных помех, осуществляется следующим образом.
Исходными данными являются сведения о требуемых параметрах разрешающей способности РТС, положении и параметрах антенны РТС, местоположении и параметрах движения носителя РТС и искусственных воздушных объектов - одной или нескольких ЛВЦ-источников активных имитирующих помех (см., например, MALD Decoy [Электронный ресурс] // Raytheon Missiles & Defence: [сайт]. URL: https://www.raymeonmissilesanddefense.com/what-we-do/naval-warfare/advanced-strike-weapons/mald-decoy (дата обращения: 04.03.2023)), воздушной цели с одним или несколькими ТРД и линзой Люнеберга, а также фацетная модель воздушной цели и фацетная модель ТРД с вращающимися лопатками ступеней КНД, соответствующая типу воздушной цели с указанием степени шероховатости и электромагнитных свойств каждого фацета.
В зависимости от требуемой точности синтеза радиосигнала задают количество лучей рассчитываемой ИР Nл, скорость вращения лопаток ступеней КНД ТРД Fвр, количество лучей ДН РТС NлРТС.
Диаграмму направленности антенны РТС представляют в виде набора лучей внутри пространства, объем которого определяют формой основного и боковых лепестков ДН. Центральным принимают луч, совпадающий с направлением оси ДН. ДН разбивают на лучи с равномерным шагом по угловым отклонениям от центрального луча в соответствии с NлPTC, определяют мощность каждого луча Р0,n, n=0,1,…, NлРТС; i=0; в соответствии с коэффициентом усиления ДН РТС для угла отклонения луча F0(αn)=Р0,n.
Проверяют пересечение каждого луча из набора ДН с фацетами модели воздушной цели на основе решения задачи нахождения точки пересечения луча и элементарной площадки (см., например, Moller Т., Trumbore В. Fast, minimum storage ray-triangle intersection // Journal of Graphics Tools. 1997. Vol. 2(1). P. 21-28). В случае наличия пересечения луча с фацетом модели воздушной цели ставят лучу в соответствие элементарную площадку на фацете модели воздушной цели. Каждый такой луч определяют точкой излучения и центром конкретной элементарной площадки.
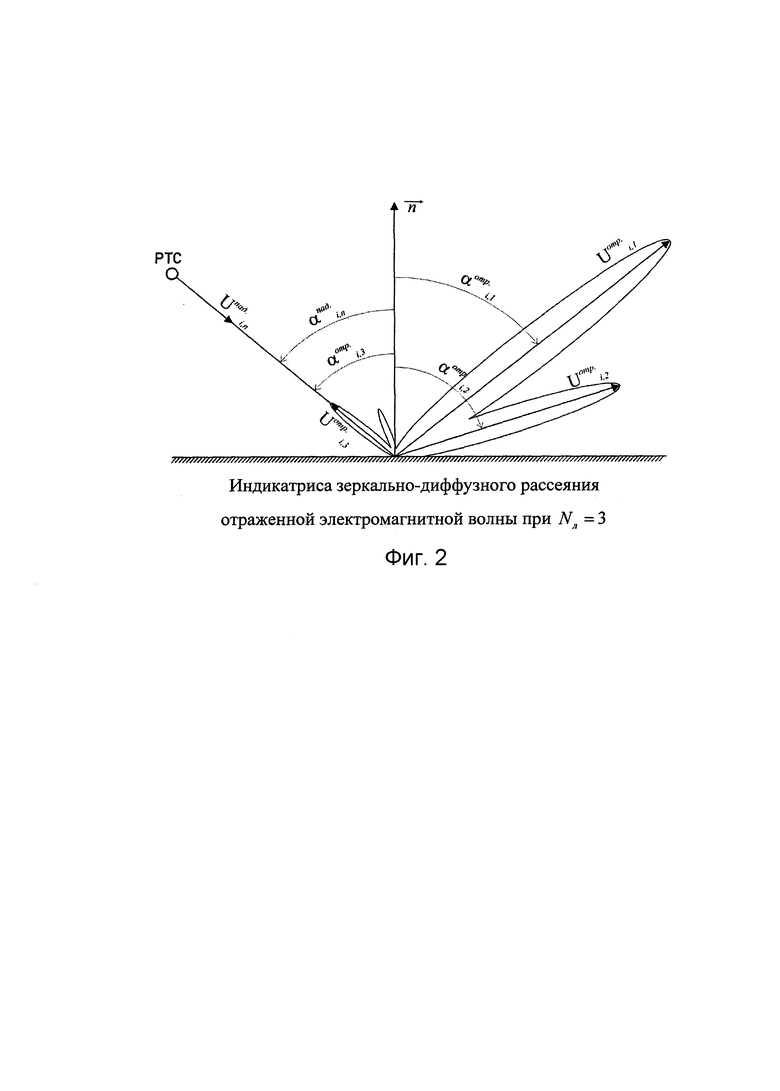
Вычисляют угол падения луча  и удельную ЭПР для каждой элементарной площадки, рассчитывают ИР отраженной от элементарной площадки ЭМВ (см., например, Сучков В.Б. Объектно-ориентированный метод определения комплексных коэффициентов отражения элементов полигональной модели объекта локации // Системы и средства связи, телевидения и радиовещания. 2013. Выпуск 1,2, С.159-165), ИР представляют в виде набора лучей внутри пространства, объем которого определяют формой основного и боковых лепестков ИР. Количество лучей ИР Nл определяют исходя из требуемой точности радиосигнала (фиг.2).
и удельную ЭПР для каждой элементарной площадки, рассчитывают ИР отраженной от элементарной площадки ЭМВ (см., например, Сучков В.Б. Объектно-ориентированный метод определения комплексных коэффициентов отражения элементов полигональной модели объекта локации // Системы и средства связи, телевидения и радиовещания. 2013. Выпуск 1,2, С.159-165), ИР представляют в виде набора лучей внутри пространства, объем которого определяют формой основного и боковых лепестков ИР. Количество лучей ИР Nл определяют исходя из требуемой точности радиосигнала (фиг.2).
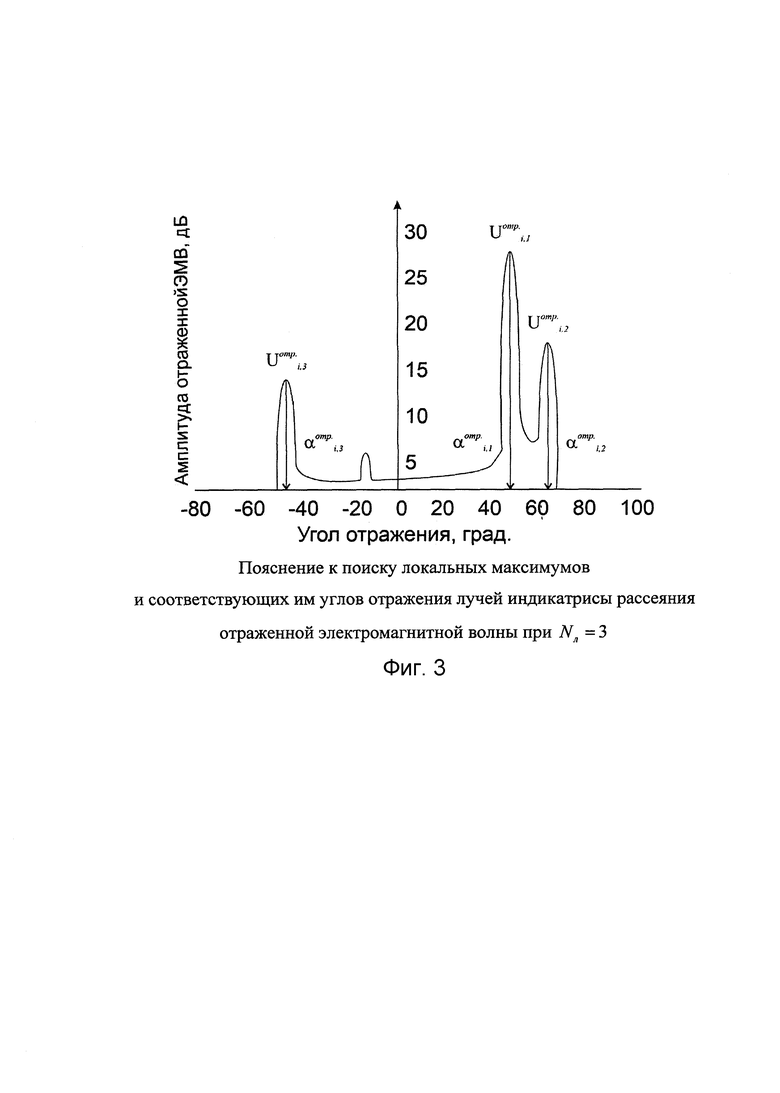
Выполняют поиск Nл локальных максимумов ИР, соответствующих лучам ИР отраженной ЭМВ, угол отражения каждого луча  определяют по аргументу соответствующего локального максимума ИР (см., например, Выгодский М.Я. Правила нахождения экстремума // Справочник по высшей математике. 2005. С.758-759) (фиг.3). Формируют отраженные от элементарных площадок лучи ИР, мощность которых определяют в соответствие с коэффициентом ослабления ЭМВ для материала фацета
определяют по аргументу соответствующего локального максимума ИР (см., например, Выгодский М.Я. Правила нахождения экстремума // Справочник по высшей математике. 2005. С.758-759) (фиг.3). Формируют отраженные от элементарных площадок лучи ИР, мощность которых определяют в соответствие с коэффициентом ослабления ЭМВ для материала фацета  и значением коэффициентов усиления Fi(αn) для каждого из лучей в соответствии с выражением (1)
и значением коэффициентов усиления Fi(αn) для каждого из лучей в соответствии с выражением (1)

и проверяют пересечение каждого отраженного луча ИР со всеми фацетами модели воздушной цели и лопаток ступеней КНД модели ТРД
В случае наличия пересечения хотя бы одного отраженного луча с каким-либо фацетом модели воздушной цели выполняют процедуру многократного переотражения радиосигнала:
- принимают отраженный от текущей элементарной площадки луч в качестве падающего для следующей элементарной площадки, центром которой является точка пересечения отраженного на i-й итерации луча и фацета:

где i - номер итерации процедуры переотражения;
- вычисляют задержку распространения парциального сигнала от элементарной площадки до точки пересечения Δti,n, где n - номер луча из набора лучей ДН антенны или ИР отраженной ЭМВ, при расчете времени задержки радиосигнала принимают точку пересечения отраженного луча с фацетом за точку приема;
- ставят падающему лучу в соответствие элементарную площадку на фацете фацетной модели воздушной цели;
- с учетом метеоусловий, рефракции, зон затенения, движения участников сцены, вычисляют угол падения луча, удельную ЭПР для элементарной площадки;
- рассчитывают ИР ЭМВ, отраженной от элементарной площадки;
- выполняют поиск Nл локальных максимумов ИР, определяют углы отражения каждого из Nл лучей;
- формируют отраженные лучи ИР, мощность которых определяют в соответствии с коэффициентом ослабления ЭМВ для материала фацета и коэффициентом усиления ИР ЭМВ для каждого из лучей по формуле (1), проверяют пересечение каждого отраженного луча индикатрисы со всеми фацетами модели воздушной цели;
- в случае пересечения луча ИР ЭМВ с плоскостью лопаток ступени КН Д ТРД (фиг.4) выполняется процедура вращения лопаток ступени компрессора при наблюдении из точки излучения отраженного луча, (см., например, V. Chen The Micro-Doppler Effect in Radar 2nd edition // Artech House, 2019, p.118);
- принимают отраженный от текущей элементарной площадки луч в качестве падающего для следующей элементарной площадки, помечают луч как прошедший плоскость лопаток ступени КНД;
- вычисляют задержку распространения парциального сигнала от элементарной площадки до точки пересечения Δti,n, где n - номер луча из набора лучей ИР отраженной ЭМВ, при расчете времени задержки радиосигнала принимают точку пересечения отраженного луча с фацетом за точку приема;
- ставят падающему лучу в соответствие элементарную площадку на фацете фацетной модели воздушной цели или лопаток ступени КНД ТРД;
- с учетом метеоусловий, рефракции, зон затенения, движения участников сцены, вычисляют угол падения луча, удельную ЭПР для элементарной площадки, при этом для элементарных площадок на фацетах лопаток ступени КНД ТРД, с учетом скорости вращения лопаток ступени КНД ТРД Fвр, удельная ЭПР для элементарной площадки будет вычисляться как:

где σф - ЭПР фацета лопатки ступени КНД ТРД,
t - время,
b - номер лопатки ступени КНД ТРД,
N - общее число лопаток ступени КНД;
- рассчитывают ИР ЭМВ, отраженной от элементарной площадки;
- выполняют поиск Nл локальных максимумов ИР, определяют углы отражения каждого из Nл лучей;
- формируют отраженные лучи ИР, мощность которых определяют в соответствии с коэффициентом ослабления ЭМВ для материала фацета и коэффициентом усиления ИР ЭМВ для каждого из лучей по формуле (1), проверяют пересечение каждого отраженного луча индикатрисы со всеми фацетами модели воздушной цели.
Процедуру повторяют до тех пор, пока пересечение каждого отраженного луча с фацетами модели воздушной цели или лопаток ступеней КНД модели ТРД станет невозможным или пока не достигнет некоторого заданного числа повторений.
В случае отсутствия точки пересечения отраженного луча с каким-либо фацетом модели воздушной цели или лопатки ступени КНД модели ТРД или при невозможности пересечения отраженного луча с фацетами модели воздушной цели или лопаток ступени КНД модели ТРД, по окончании повторения процедуры многократного переотражения радиосигнала для каждого из отраженных лучей или по достижении некоторого заданного числа итераций процедуры многократного переотражения радиосигнала результирующий имитируемый отраженный сигнал формируется как суперпозиция сигналов, отраженных от отдельных элементарных площадок планера воздушной цели с линзой Люнеберга, и от вращающихся лопаток КНД ТРД, излученных АЛВЦ, каждый из которых равен радиосигналу, задержанному на время tdk распространения от антенны РТС до k-й группы элементарных площадок или от точки облучения k-й элементарной площадки или группы элементарных площадок до точки отражения на k-й элементарной площадке или группе элементарных площадок при условии окончания процедуры многократного переотражения на i-й итерации Δtk,i и от k-й группы элементарных площадок до антенны РТС Δtk,PTC и умноженному на некоторую комплексную величину, при этом под i=0 понимают, что многократное переотражение отсутствует и рассматривают только процесс отражения луча от нулевой элементарной площадки, сигнал излучается РТС:

где  - суперпозиция мощностей лучей, отраженных от фацетной модели воздушной цели,
- суперпозиция мощностей лучей, отраженных от фацетной модели воздушной цели,  - суперпозиция мощностей лучей, отраженных от лопаток ступеней КНД модели ТРД,
- суперпозиция мощностей лучей, отраженных от лопаток ступеней КНД модели ТРД,  - суперпозиция мощностей лучей, излученных АЛВЦ, Δtk,PTC - время распространения радиосигнала от k-й группы элементарных площадок до антенны РТС; Δtk,i - время распространения радиосигнала от антенны РТС до k-й группы элементарных площадок или от точки облучения k-й элементарной площадки или группы элементарных площадок до точки отражения на k-й элементарной площадке или группе элементарных площадок при условии окончания процедуры многократного переотражения на i-й итерации.
- суперпозиция мощностей лучей, излученных АЛВЦ, Δtk,PTC - время распространения радиосигнала от k-й группы элементарных площадок до антенны РТС; Δtk,i - время распространения радиосигнала от антенны РТС до k-й группы элементарных площадок или от точки облучения k-й элементарной площадки или группы элементарных площадок до точки отражения на k-й элементарной площадке или группе элементарных площадок при условии окончания процедуры многократного переотражения на i-й итерации.
При этом для лучей, пересекавших плоскость КНД в процессе распространения, отраженный сигнал рассчитывается с учетом переотражений лучей от лопаток КНД первой и второй ступени (см., например, Надточий В.Н. Математическая модель отраженного сигнала от воздушной цели с турбореактивным двигателем // Моделирование, оптимизация и информационные технологии, 2017. Научный журнал №4(19)):

где S1ст.(t) - сигнал от лопаток 1 ступени КНД, S2ст.(t) - сигнал от лопаток 2 ступени КНД.
После формирования имитируемого отраженного сигнала формируют СДП воздушной цели с ТРД, сравнивают сформированный расчетный СДП с экспериментальными данными от специализированного стенда и корректируют параметры имитационной модели (скорость вращения лопаток ступеней КНД ТРД Fвр, количество лучей ИР ЭМВ Nл, количество лучей ДН РТС NлPTC, коэффициенты усиления ИР ЭМВ Fi(αn) и другие параметры) в среде математического моделирования.
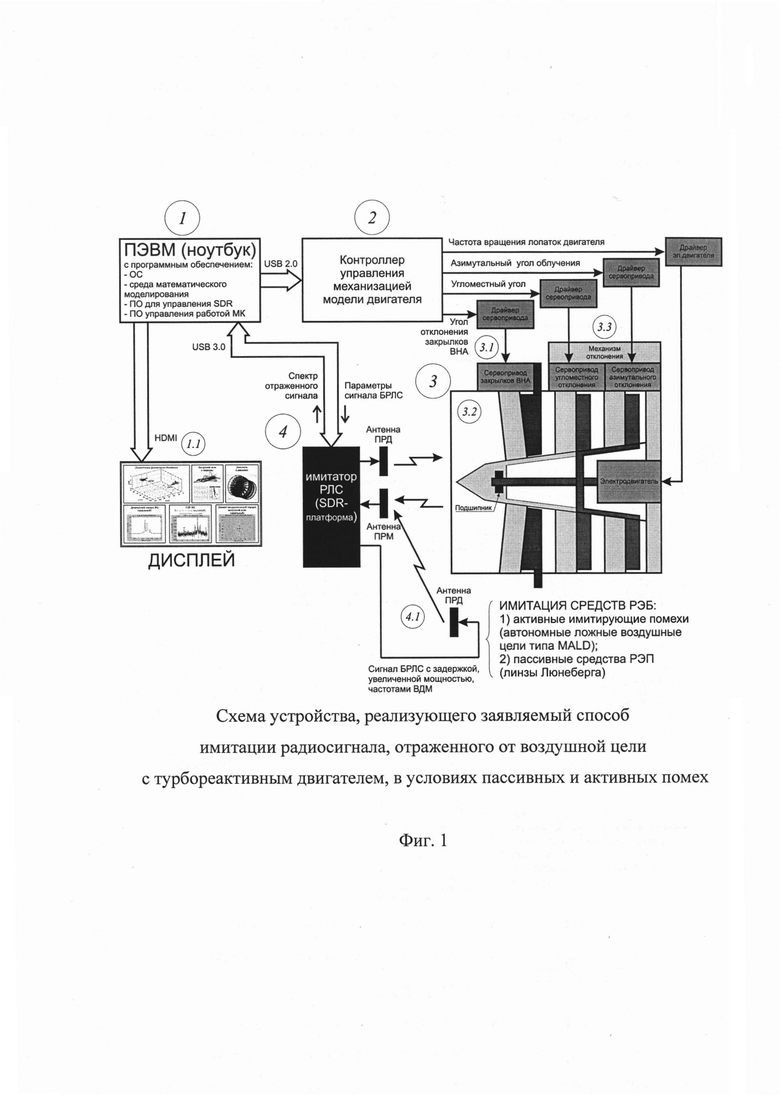
Устройство для реализации способа имитации радиосигнала, отраженного от воздушной цели с ТРД, в условиях пассивных и активных помех, схематично представлено на фиг.1 и представляет собой программно-аппаратный комплекс, состоящий из:
1) Персональной электронной вычислительной машины 1 (ПЭВМ) с предустановленным ПО - средой математического моделирования, ПО для управления SDR, ПО для управления работой микроконтроллеров;
2) Контроллера управления механизацией модели ТРД 2;
3) Масштабной модели ТРД с вращающимися лопатками ступеней КНД и отклоняемыми закрылками ВНА 3, включающей в себя сервопривод закрылков ВНА 3.1, электродвигатель 3.2, механизм отклонения ТРД по азимуту и углу места 3.3, состоящий из сервоприводов азимутального и угломестного отклонения;
4) Имитатора БРЛС 4 и средства имитации помеховой обстановки 4.1, выполненных на базе SDR-платформы (SDR), обеспечивающих излучение сигналов с заданными параметрами, в том числе со сдвигом во времени, прием отраженного сигнала и его первичную обработку.
Связь между элементами устройства осуществляют по протоколу USB. На дисплейный модуль ПЭВМ 1.1 выводится графическая информация от предустановленного ПО в процессе работы устройства.
Работа устройства, реализующего предлагаемый способ имитации радиосигнала, отраженного от воздушной цели с ТРД, в условиях пассивных и активных помех, осуществляется следующим образом.
С помощью ПЭВМ 1 задают параметры сигнала имитатора БРЛС 4, параметры работы средств имитации помеховой обстановки 4.1, угол отклонения закрылков ВНА и скорость вращения лопаток модели ТРД 3.
В среде математического моделирования на ПЭВМ 1 имитируют сигнал, отраженный от воздушной цели с ТРД, с учетом взаимного положения БРЛС и воздушной цели с ТРД. Вычисляют угол падения луча ЭМВ на плоскость лопаток ступени КНД ТРД и на его основе вычисляют углы отклонения модели ТРД 3 по азимуту и углу места таким образом, чтобы угол между антенной имитатора БРЛС 4 и плоскостью ВНА модели ТРД 3 был равен углу падения луча ЭМВ на плоскость лопаток ступени КНД ТРД после переотражения в ВЗУ.
Данные об угле отклонения закрылков ВНА, скорости вращения лопаток модели ТРД и углах отклонения модели ТРД по азимуту и углу места передают через шину USB на контроллер управления механизацией модели ТРД 2, который посредством драйверов сервоприводов управляет сервоприводом закрылков ВНА ТРД 3.1, электродвигателем 3.2 и механизмом отклонения модели ТРД по азимуту и углу места 3.3 в соответствии с заданными параметрами.
В то же время сигнал с заданными параметрами излучают имитатором БРЛС 4, идентичный сигнал со сдвигом по времени излучают средством имитации помеховой обстановки 4.1, принимают и накапливают сигнал, отраженный от модели ТРД, в смеси с сигналом от средств имитации помеховой обстановки 4.1. В имитаторе БРЛС 4 после накопления сигнала осуществляют ПФ для получения спектра отраженного сигнала. Полученный спектр отраженного сигнала по шине USB передают на ПЭВМ 1 для сравнения с расчетным спектром, полученным в среде математического моделирования, и дальнейшей коррекции параметров (скорость вращения лопаток ступеней КНД ТРД Fвр, количество лучей ИР ЭМВ Nл, количество лучей ДН РТС NлPTC, коэффициенты усиления ИР ЭМВ Fi(αn) и другие) имитационной модели. Результаты работы модели и устройства отображаются на дисплее 1.1.
Таким образом, переход к расчету мощности лучей отраженной ЭМВ осуществляется определением мощности отраженных лучей ИР исходя из коэффициента ослабления ЭМВ для материала фацета и коэффициента усиления ИР ЭМВ для каждого из лучей, что обеспечит снижение вычислительных затрат на расчет отраженного сигнала, учет зеркально-диффузного характера рассеяния отраженной ЭМВ осуществляется дополнительным расчетом индикатрисы рассеяния, учет угла падения ЭМВ на плоскость лопаток КНД ТРД осуществляется проведением дополнительной процедуры вращения лопаток ступени КНД при наблюдении из точки излучения отраженного луча, что обеспечит повышение точности имитации отраженного радиосигнала, учет влияния пассивных средств РЭП и активных имитирующих помех осуществляется введением дополнительных моделей ЛВЦ и линзы Люнеберга в состав имитационной модели, при этом в предлагаемом устройстве учет угла падения ЭМВ на плоскость лопаток ступеней КНД ТРД осуществляется механическим поворотом модели ТРД в азимутальной и угломестной плоскостях на величину такую, чтобы угол между антенной имитатора БРЛС и плоскостью ВНА модели ТРД соответствовал углу падения луча ЭМВ на плоскость лопаток ступеней КНД ТРД после переотражения в ВЗУ, что обеспечивает повышение информативности отраженного радиосигнала, учет влияния пассивных средств РЭП и активных имитирующих помех осуществляется введением в конструкцию устройства средства имитации помеховой обстановки, выполненного на базе SDR-платформы, что обеспечивает расширение функциональных возможностей устройства.
Предлагаемый способ и устройство практически применимы, так как для их реализации возможно использовать общедоступное программное обеспечение, а также использованы типовые составные части, широко распространенные на рынке электронных компонентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИМИТАЦИИ РАДИОСИГНАЛА | 2023 |
|
RU2804902C1 |
| Способ имитации радиосигнала | 2020 |
|
RU2747883C1 |
| Способ имитации радиосигнала | 2016 |
|
RU2621329C1 |
| СПОСОБ ИМИТАЦИИ РАДИОСИГНАЛА, ОТРАЖЕННОГО ОТ ПРОСТРАНСТВЕННО РАСПРЕДЕЛЕННОЙ ДИНАМИЧЕСКОЙ РАДИОФИЗИЧЕСКОЙ СЦЕНЫ, В РЕАЛЬНОМ ВРЕМЕНИ | 2008 |
|
RU2386143C2 |
| СПОСОБ МОДЕЛИРОВАНИЯ СИГНАЛА, ОТРАЖЕННОГО ОТ ЗЕМНОЙ ПОВЕРХНОСТИ, В РЕЖИМЕ КАРТОГРАФИРОВАНИЯ РЕАЛЬНЫМ ЛУЧОМ | 2013 |
|
RU2530544C1 |
| Способ распознавания типа воздушной цели из класса "Самолет с турбореактивным двигателем" на основе нейронной сети | 2023 |
|
RU2826233C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии имитирующих помех | 2020 |
|
RU2735314C1 |
| Способ быстрого имитирования радиолокационных изображений | 2024 |
|
RU2835989C1 |
| Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2802653C1 |
| Способ измерения угла места воздушного объекта в метровом диапазоне электромагнитных волн с использованием электронной карты местности | 2019 |
|
RU2720948C1 |

Изобретение относится к области радиолокационной техники и может быть использовано при полунатурном моделировании распространения радиоволн с учетом зеркально-диффузного характера рассеяния, возвратно-поступательного движения составных элементов воздушной цели, наличия пассивных и активных помех и многократных переотражений от поверхности искусственных объектов путем обеспечения имитации в реальном времени радиосигнала, отраженного от пространственно-распределенной радиофизической сцены, в качестве которой выступают поверхности искусственных объектов с различными электромагнитными свойствами: металл, стекло, пластик, радиопоглощающие материалы, метаматериалы. Техническим результатом является повышение точности имитации отраженного радиосигнала за счет учета зеркально-диффузного характера рассеяния отраженной электромагнитной волны (ЭМВ) и угла падения ЭМВ на плоскость лопаток компрессора низкого давления (КНД) турбореактивного двигателя (ТРД) после переотражения в воздухозаборном устройстве (ВЗУ), а также расширение функциональных возможностей за счет учета влияния пассивных средств радиоэлектронного подавления (РЭП) и активных имитирующих помех. В заявленном способе осуществляют переход к расчету мощности лучей отраженной ЭМВ, учет зеркально-диффузного характера рассеяния отраженной ЭМВ и угла падения ЭМВ на плоскость лопаток КНД ТРД после переотражения в ВЗУ, учет влияния пассивных средств РЭП и активных имитирующих помех. Формируют спектрально-доплеровский портрет (СДП) воздушной цели с ТРД, сравнивают его с экспериментальными данными от заявленного устройства и корректируют параметры имитационной модели: скорость вращения лопаток ступеней КНД ТРД Fвр, количество лучей индикатрисы рассеяния (ИР) ЭМВ Nл, количество лучей диаграммы направленности (ДН) радиотехнической системы (РТС) NлPTC, коэффициенты усиления ИР ЭМВ Fi(αn) и другие параметры) в среде математического моделирования заявленного устройства. При этом осуществляют механический поворот модели ТРД в азимутальной и угломестной плоскостях на величину, соответствующую углу падения луча на плоскость лопаток ступеней КНД ТРД после переотражения в ВЗУ. Заявлено также устройство, в которое дополнительно введены имитатор пассивных средств РЭП и активных имитирующих помех. Имитатор сигналов бортовой радиолокационной станции (БРЛС) и средства имитации помеховой обстановки выполнены на базе SDR-платформы, на персональную электронно-вычислительную машину (ПЭВМ) предустановлено программное обеспечение (ПО) – среда математического моделирования, ПО для управления SDR, ПО для управления работой микроконтроллеров и контроллер управления механизацией модели ТРД, связь между элементами устройства осуществляют по протоколу USB. 2 н.п. ф-лы, 4 ил.
1. Устройство имитации радиосигнала, отраженного от воздушной цели с турбореактивным двигателем, в условиях пассивных и активных помех,
содержащее в себе радиолокационную измерительную систему, которая управляет скоростью вращения модели турбореактивного двигателя (ТРД) с вращающимися ступенями компрессора низкого давления (КНД) и системой перемещения ТРД по азимуту,
отличающееся тем, что в него дополнительно введены имитатор сигналов бортовой радиолокационной станции (БРЛС), средство имитации помеховой обстановки - имитатор пассивных средств радиоэлектронного противодействия (РЭП) и активных имитирующих помех, выполненные на базе SDR-платформы (SDR) персональной электронной вычислительной машины (ПЭВМ) с предустановленным программным обеспечением (ПО) - средой математического моделирования, ПО для управления SDR, ПО для управления работой микроконтроллеров, и контроллер управления механизацией модели ТРД, связь между элементами устройства осуществляют по протоколу USB,
ПЭВМ выполнена с возможностью задания параметров сигнала имитатора БРЛС, параметров работы средств имитации помеховой обстановки, угла отклонения закрылков входного направляющего аппарата (ВНА) КНД и скорости вращения лопаток модели ТРД,
среда математического моделирования на ПЭВМ выполнена с возможностью имитации сигнала, отраженного от воздушной цели с ТРД, с учетом взаимного положения БРЛС и воздушной цели с ТРД, определения угла падения луча электромагнитной волны (ЭМВ) на плоскость лопаток ступени КНД ТРД и определения на его основе углов отклонения модели ТРД по азимуту и углу места таким образом, чтобы угол между антенной имитатора БРЛС и плоскостью ВНА модели ТРД был равен углу падения луча ЭМВ на плоскость лопаток ступени КНД ТРД после переотражения в воздухозаборном устройстве (ВЗУ),
при этом устройство имитации радиосигнала выполнено с возможностью
передачи данных об угле отклонения закрылков ВНА, скорости вращения лопаток модели ТРД и углах отклонения модели ТРД по азимуту и углу места через шину USB на контроллер управления механизацией модели ТРД, который обеспечивает управление сервоприводами закрылков ВНА ТРД, электродвигателем и механизмом отклонения модели ТРД по азимуту и углу места в соответствии с заданными в ПЭВМ параметрами,
излучения сигнала с заданными параметрами имитатором БРЛС, излучения идентичного сигнала со сдвигом по времени средством имитации помеховой обстановки, приема и накопления сигнала, отраженного от модели ТРД в смеси с сигналом от средств имитации помеховой обстановки,
при этом имитатор БРЛС выполнен с возможностью получения спектрально-доплеровского портрета (СДП) отраженного сигнала ТРД, передачи его по шине USB на ПЭВМ для сравнения с расчетным СДП модели ТРД, полученным в среде математического моделирования, и коррекции параметров имитационной модели: скорости вращения лопаток ступеней КНД ТРД, количества лучей индикатрисы рассеяния (ИР) ЭМВ, количества лучей диаграммы направленности (ДН) радиотехнической системы (РТС), коэффициентов усиления ИР ЭМВ.
2. Способ имитации радиосигнала, отраженного от воздушной цели с турбореактивным двигателем, в условиях пассивных и активных помех, заключающийся в том, что
1) задают координаты местоположения радиотехнической системы, модели ТРД с вращающимися лопатками ступеней КНД, которую аппроксимируют элементарными площадками-фацетами, характерные размеры, параметры неровностей и электрические свойства которых определяют исходя из требуемой точности синтеза радиосигнала,
2) задают скорость вращения лопаток ступеней КНД модели ТРД Fвр,
3) исходя из требуемой точности синтеза отраженного радиосигнала задают плотность лучей λ/X, где X - рациональное число,
4) формируют матрицу относительной видимости фацетов M(i,j,k),
где i=1,2,…,N; j=1,2,…,Na; k=1,2,…,Nr, N - общее число фацетов, Na - число угловых областей, Nr - число фацетов в каждой угловой области, с помощью алгоритма углового разделения,
5) лучи ставят в соответствие только к фацетам, видимым с направления излучения,
6) отслеживают каждый из лучей и проверяют их пересечение с фацетами модели ТРД,
7) в случае наличия пересечения с фацетом Ai вычисляют точку пересечения и отраженный луч в соответствии с законом Снеллиуса,
8) определяют область Aj распространения отраженного луча путем вычисления углов θ, ϕ в направлении отражения,
9) ставят в соответствие области Aj массив фацетов Ak из матрицы относительной видимости фацетов M(Ai,Aj,Ak),
10) проверяют пересечение луча с Ak фацетами массива 8),
11) в случае наличия пересечения с каким-либо из Ak фацетов выполняют процедуру многократного переотражения радиосигнала - возвращаются к действию 6) и отслеживают отраженный луч,
12) в случае отсутствия пересечения перестают отслеживать данный луч и возвращаются к действию 5) для отслеживания следующего луча,
13) после окончания отслеживания распространения всех лучей определяют амплитуду отраженного поля, при этом отраженный сигнал представляют как суперпозицию полей рассеяния от каждого отраженного луча,
14) формируют СДП модели ТРД,
отличающийся тем, что
исходя из требуемой точности синтеза радиосигнала задают количество лучей ИР Nл отраженной ЭМВ, количество лучей диаграммы направленности антенны ДН РТС NлPTC, задают начальное местоположение и параметры движения носителя РТС, искусственных воздушных объектов-моделей ложных воздушных целей-источников активных имитирующих помех, модели воздушной цели, которая включает в себя модель линзы Люнеберга, канал ВЗУ, модель ТРД с вращающимися лопатками ступеней КНД, соответствующую типу искусственного объекта, модели воздушной цели, ложных воздушных целей, линзы Люнеберга и модель ТРД аппроксимируют элементарными площадками-фацетами, характерные размеры, параметры неровностей и электрические свойства которых определяют исходя из требуемой точности синтеза радиосигнала, задают скорость вращения лопаток ступеней компрессоров ТРД Fвр в соответствии с режимами работы ТРД, которые зависят от параметров движения модели, диаграмму направленности антенны РТС представляют в виде набора лучей внутри пространства, объем которого определяют формой основного и боковых лепестков ДН, центральным принимают луч, совпадающий с направлением оси ДН, разбивают ДН на лучи с равномерным шагом по угловым отклонениям от центрального луча, количество лучей определяют исходя из требуемой точности синтеза радиосигнала, определяют мощность каждого луча в соответствии с коэффициентом усиления ДН РТС для угла между текущим и центральным лучами, после постановки лучу в соответствие элементарной площадки на фацетах фацетных моделей искусственных воздушных объектов или при выполнении процедуры многократного переотражения радиосигнала после вычисления угла падения луча рассчитывают ИР ЭМВ, отраженной от элементарной площадки, выполняют поиск Nл локальных максимумов ИР, определяют угол отражения каждого из Nл лучей, формируют отраженные лучи ИР, мощность которых определяют в соответствии с коэффициентом ослабления ЭМВ для материала фацета и коэффициентом усиления ИР ЭМВ для каждого из лучей, в случае пересечения луча ИР ЭМВ с плоскостью лопаток ступени компрессора низкого давления ТРД выполняется процедура вращения лопаток ступени КНД ТРД при наблюдении из точки излучения отраженного луча, после постановки лучу в соответствие элементарной площадки на фацете лопатки ступени компрессора ТРД, с учетом угла падения луча ИР, величины ЭПР фацета лопатки ступени КНД ТРД, скорости вращения лопаток ступени компрессора ТРД Fвр рассчитывают ИР ЭМВ, отраженной от элементарной площадки, выполняют поиск Nл локальных максимумов ИР, определяют угол отражения каждого из Nл лучей, формируют отраженные лучи ИР, мощность которых определяют в соответствии с коэффициентом ослабления ЭМВ для материала фацета и коэффициентом усиления ИР ЭМВ для каждого из лучей, по окончании отслеживания всех лучей определяют мощность отраженного радиосигнала как суперпозицию мощностей отраженных лучей с учетом задержки распространения лучей от антенны РТС до объекта и обратно, формируют СДП воздушной цели с ТРД, сравнивают сформированный расчетный СДП с экспериментальными данными от устройства имитации радиосигнала по п. 1 и корректируют в среде математического моделирования устройства имитации радиосигнала по п. 1 параметры имитационной модели: скорость вращения лопаток ступеней КНД ТРД Fвр, количество лучей ИР ЭМВ Nл, количество лучей ДН РТС NлPTC, коэффициенты усиления ИР ЭМВ Fi(αn).
| Способ имитации радиосигнала | 2020 |
|
RU2747883C1 |
| LIM Н., YOO J.Н., KIM С.Н., KWON K.I, MYUNG N.Н | |||
| Joint time-frequency analysis of radar micro-Doppler signatures from aircraft engine models // Journal of Electromagnetic Waves and Applications, 2011, N 25 (8-9), p.1069-1080 | |||
| Способ имитации радиосигнала | 2016 |
|
RU2621329C1 |
| CN 115372918 A, 22.11.2022 | |||
| US 2022057484 A1, 24.02.2022 | |||
| ГЕРАСИМОВ | |||

