Область техники
Настоящее изобретение относится к области ультразвуковой терапии, в частности к поворотной терапевтической системе для лечения сфокусированным ультразвуком высокой интенсивности под контролем магнитно-резонансного томографа (ЯМР), включающей такой аппарат поворотного типа.
Предпосылки создания изобретения
Известные способы лечения сфокусированным ультразвуком основаны, главным образом, на использовании ультразвуковой системы, работающей в режиме В, чтобы найти подлежащую обработке область субъекта и контролировать процесс терапии. Такое общепринятое ультразвуковое устройство, работающее в режиме В, имеет следующие недостатки при осуществлении контроля и лечения:
1) ультразвуковое изображение, полученное в режиме В, представляет собой простое плоское изображение, видимое под определенным углом так, что даже при использовании трехмерной системы отображения ультразвука, видимая область все еще ограничена;
2) ультразвуковое изображение ограничено по глубине наблюдения, костные ткани в значительной степени влияют на изображение, так что ткань позади кости едва видна и имеет артефакты;
3) ультразвуковые изображения обладают слабой способностью идентификации границы ткани, и, в частности, трудно идентифицировать небольшие и глубоко проникающие опухоли.
Кроме того, аппарат для магнитно-резонансной томографии (ЯМР) является важным аппаратом в биологических и медицинских областях. Он может накладывать адекватные градиенты на магнитное поле с тем, чтобы сигналы магнитного резонанса могли быть получены выборочно, и информация обрабатывается так, чтобы получить особенности ткани каждой точки и, таким образом, может быть получено изображение ткани. Полученное изображение магнитного резонанса способно идентифицировать различные ткани и может легко отличить нормальную ткань от ткани опухоли. Это обеспечивает трехмерные данные определенного объема, чтобы отобразить часть человеческого тела или даже все тело, поэтому, ЯМР является подходящим способом контроля при лечении сфокусированным ультразвуком высокой интенсивности.
Японский патент №3322649 раскрывает систему терапии, включающую аппарат ЯМР с частью оборудования ультразвуковой терапии. Как правило, расстояние вертикального перемещения под кроватью пациента в проеме аппарата ЯМР составляет приблизительно 140 мм, таким образом, движение оборудования ультразвуковой терапии при лечении по вертикали весьма ограничено. Поэтому, в этой системе терапии аппарат ЯМР используется только для предварительного определения местоположения опухоли, затем пациент выводится из магнитного поля ЯМР и лечится с помощью ультразвуковой терапии. Такая терапевтическая система требует повторных перемещений пациента и нескольких местоположений. Система ориентирования является сложной, и ориентирование требует значительного времени.
Американские патенты №5275165 и №5443068 и некоторые другие раскрывают немагнитное устройство позиционирования с аппликатором энергии ультразвука, работающего в проеме магнитного поля системы ЯМР с целью избежать любой помехи от устройства позиционирования на магнитное поле системы ЯМР. Однако диапазон перемещения ультразвуковых датчиков аппликаторов в этих устройствах позиционирования ограничен, и требование обеспечения многократного размера при лечении опухолей не соблюдается.
Кроме того, а патенте США 6148225, выданный компании Siemens Aktiengesellschaft, раскрывается аппарат ультразвуковой терапии, в котором используется высокочастотный генератор для формирования электрических сигналов с различными дискретными значениями частоты, которые лежат в пределах частотной полосы в хронологической последовательности. Целая сеть дискретных значений частоты не лежит во второй частотной полосе, которая соответствует диапазону приема одновременно работающего диагностического аппарата ЯМР. Таким образом, аппарат ультразвуковой терапии не нарушает магнитное поле аппарата магнитного резонанса, когда лечение ультразвуком выполняется под контролем ЯМР.
Система терапии, описанная в каждом вышеупомянутом патенте, является системой ультразвуковой терапии, комбинированной с системой ЯМР. Эти системы терапии имеют следующие основные недостатки:
1) расстояние вертикального перемещения под кроватью пациента в проеме аппарата ЯМР весьма ограничено, так что очень трудно разместить ультразвуковой датчик, требующий многомерного движения под кроватью пациента, и еще труднее разместить сложный перемещающий и ориентирующий механизм, располагаемый под кроватью пациента в проеме аппарата ЯМР и занимающий ограниченное пространство для перемещения ультразвукового датчика, по показаниям которого определяются процедуры лечения;
2) перемещающий и ориентирующий механизм, расположенный в проеме аппарата ЯМР, может вызвать помехи в работе аппарата ЯМР и, соответственно, полученные изображения ткани, возможно, окажутся неправильными, поэтому, требуются немагнитные конструкции при лечении на основе ультразвукового датчика, и для этих систем требуется особый механизм перемещения и ориентирования, соответственно, увеличивая техническую сложность и стоимость изготовления таких систем;
3) ультразвуковой датчик, приводимый в движение перемещающим и ориентирующим механизмом, может двигаться только в пределах ограниченного пространства и не может отвечать требованиям лечения опухолей различных размеров.
Краткое описание изобретения
Учитывая вышеупомянутые недостатки известных устройств, в настоящем изобретении техническая проблема решена на основе создания терапевтического аппарата поворотного типа для лечения сфокусированным ультразвуком высокой интенсивности, который имеет свободно перемещающийся ультразвуковой датчик, и поворотную терапевтическую систему для лечения сфокусированным ультразвуком высокой интенсивности под контролем магнитно-резонансного томографа (ЯМР), которая наводит меньше помех на аппарат ЯМР и позволяет получать изображения ультразвука хорошего качества.
Техническое решение для устранения недостатков известных систем в настоящем изобретения состоит в следующем: терапевтический аппарат поворотного типа для лечения сфокусированным ультразвуком высокой интенсивности содержит ультразвуковой датчик и перемещающий и ориентирующий механизм, в котором указанный перемещающий и ориентирующий механизм включает механизм поворота, который связан с ультразвуковым датчиком опорным штоком.
Указанный механизм поворота может содержать механизм перемещения по оси Y, имеющий центр поворота на оси Y, шток перемещения по оси Y, связанный с центром поворота по оси Y, приводное устройство, обеспечивающее вращение центра поворота на оси Y, и опорный шток, закрепленный на штоке перемещения по оси Y.
Предпочтительно, указанный механизм поворота дополнительно содержит механизм перемещения по оси Z, имеющий центр поворота на оси Z, приводное устройство оси Z для вращения центра поворота на оси Z и опорный шток, установленный на центре поворота на оси Z. При этом приводное устройство оси Y и оси Z включает двигатели, а центр поворота на оси Y и центр поворота на оси Z включают синхронизирующие шкивы, связанные, соответственно, с приводом по оси Y и с приводом по оси Z приводным ремнем.
Для того чтобы переместить ультразвуковой датчик в соответствующее местоположение для лечения, указанный механизм поворота дополнительно содержит приводной механизм для перемещения опорного штока авторотацией вдоль оси X. Опорный шток связан с выходным валом указанного приводного механизма.
Предпочтительно, чтобы под указанным механизмом поворота располагалась конструкция перемещения по оси X. Конструкция перемещения по оси Х содержит резьбовой шток, ось которого расположена в направлении X, опорную плиту, закрепленную на гайке резьбового штока, и приводной механизма для привода резьбового штока. Указанный механизм поворота установлен на опорной плите.
Для свободного перемещения ультразвукового датчика перемещающим и ориентирующим механизмом, под указанной опорной плитой предусмотрено скользящее устройство. Скользящее устройство имеет скользящее колесо, предпочтительно универсального типа. Когда к перемещающему и ориентирующему механизму приложена сила, весь перемещающий и ориентирующий механизм может двигаться под приводом скользящего колеса, и ультразвуковой датчик может двигаться под приводом опорного штока. Это дополнительное устройство позволяет оператору вручную управлять ультразвуковым датчиком во время лечения и вести клиническое наблюдение во время лечения.
В механизме поворота по настоящему изобретению угол поворота на оси Y или оси Z опорного штока колеблется от -40° до +40°.
Кроме того, указанный механизм поворота также может иметь только механизм перемещения по оси Z, в котором механизм перемещения по оси Z содержит центр поворота на оси Z, шток перемещения по оси Z, связанный с осью вращения Z, приводное устройство оси Z для вращения центра поворота на оси Z и опорный шток, закрепленный на штоке перемещения по оси Z, или указанный механизм поворота может включать только механизм перемещения по оси Y.
Ультразвуковой датчик по настоящему изобретению может быть помещен в контейнер, заполненный жидкостью. Указанный контейнер связан с опорным штоком, при этом жидкость в контейнере может быть дегазированной водой.
В терапевтическом аппарате по настоящему изобретению опорный шток может двигаться во всех направлениях под действием системы привода передвижного и ориентирующего механизма; ультразвуковой датчик связан с опорным штоком и, таким образом, ультразвуковой датчик может быть точно перемещен в нужное местоположение.
В терапевтическом аппарате по настоящему изобретению перемещающий и ориентирующий механизм имеет механизм поворота, и когда опорный шток перемещается по оси Z или оси Y, диапазон движения приводного механизма (который относится к двигателю) всего перемещающего и ориентирующего механизма весьма ограничен или даже отсутствует. Поэтому, когда этот терапевтический аппарат поворотного типа для лечения сфокусированным ультразвуком высокой интенсивности используется в соединении с аппаратом диагностики и получения ультразвуковых изображений (например, с аппаратом ЯМР), электромагнитное поле двигателя почти не влияет на качество отображения и, соответственно, помехи из-за магнитного поля двигателя в механизме перемещения и ориентирования на магнитное поле в аппарате диагностики и получения ультразвуковых изображений могут быть подавлены достаточно хорошо. Перемещающий и ориентирующий механизм обеспечивает различные виды движения и позволяет медицинскому персоналу лечить пациента при различных положениях тела.
Поворотная терапевтическая система для лечения сфокусированным ультразвуком высокой интенсивности под контролем ЯМР включает аппарат ЯМР, который содержит первую кровать пациента, помещенную в проем аппарата ЯМР, и вышеупомянутый терапевтический аппарат с фокусированным ультразвуком высокой интенсивности, в котором перемещающий и ориентирующий механизм расположен за пределами проема аппарата ЯМР, при этом опорный шток, связанный с указанным перемещающим и ориентирующим механизмом, может также находиться в проеме аппарата ЯМР.
Для удобства работы предпочтительно, чтобы перемещающий и ориентирующий механизм располагался бы под первой кроватью пациента. Аппарат ЯМР дополнительно содержит вторую кровать пациента, которая соединена с опорой, и перемещающий и ориентирующий механизм размещен на указанной опоре.
Более предпочтительно, чтобы опорный шток был бы изготовлен из немагнитных материалов или неметаллических материалов, чтобы помехи от терапевтического аппарата с фокусированным ультразвуком высокой интенсивности на магнитное поле аппарата ЯМР были бы снижены, и можно было бы избежать отрицательного влияния на качество отображения.
Когда система терапии по настоящему изобретению используется при лечении, пациент лежит во второй кровати. Указанный перемещающий и ориентирующий механизм находится за пределами проема аппарата ЯМР, и один конец опорного штока, связанного с ультразвуковым датчиком, входит в проем аппарата ЯМР. Таким образом, настоящее изобретение выбирает область для облучения энергией датчика ультразвука, и эта область пересекает область создания отображения и контроля аппарата ЯМР на обрабатываемом участке тела пациента. При этом система терапии по настоящему изобретению лучше интегрирует ЯМР с ультразвуком терапевтическим аппаратом и увеличивает коэффициент использования оборудования.
Из-за ограниченного пространства в проеме аппарата ЯМР и по плану лечения, угол поворота на оси Y или оси Z опорного штока лежит в пределах от -40° до +40°. При условии обеспечения вышеупомянутого диапазона углов поворота, размеры опорного штока и всего перемещающего и ориентирующего механизма разработаны таким образом, что опорный шток не будет ударять по механизму поворота по оси Y снизу или по кровати пациента в аппарате ЯМР.
Терапевтическая система по настоящему изобретению имеет механизм перемещения и ориентации поворотного типа. По сравнению с линейным перемещающим и ориентирующим механизмом механизм поворотного типа имеет меньший размер и относительный большой угол поворота. Следовательно, для поворотного перемещающего и ориентирующего механизма и линейного механизма перемещения с тем же самым объемом, диапазон движения поворотного механизма, больше. При этом, поскольку пространственный механизм перемещения вообще состоит из нескольких механизмов перемещения в одном направлении, например, по оси Y, оси Z и т.д., то когда линейный механизм перемещения двигается в определенном направлении (например, в направлении оси Y), двигатели привода других односторонних механизмов перемещения (например, механизм перемещения в направлении оси Z) всегда движутся в одном том же направлении. Поскольку двигатель создает электромагнитное поле, то когда двигатель расположен рядом с аппаратом ЯМР, электромагнитное поле двигателя будет влиять на качество изображения аппарата ЯМР. Настоящее изобретение снабжено поворотным механизмом. Когда датчик ультразвука движется по оси Y или оси Z, каждый приводной двигатель в других направлениях не движется. Даже если некоторые приводные двигатели движутся вместе с ним, диапазон хода двигателя весьма ограничен, и соответственно отрицательный эффект электромагнитного поля двигателя на изображение аппарата ЯМР будет пренебрежимо мал.
Краткое описание чертежей
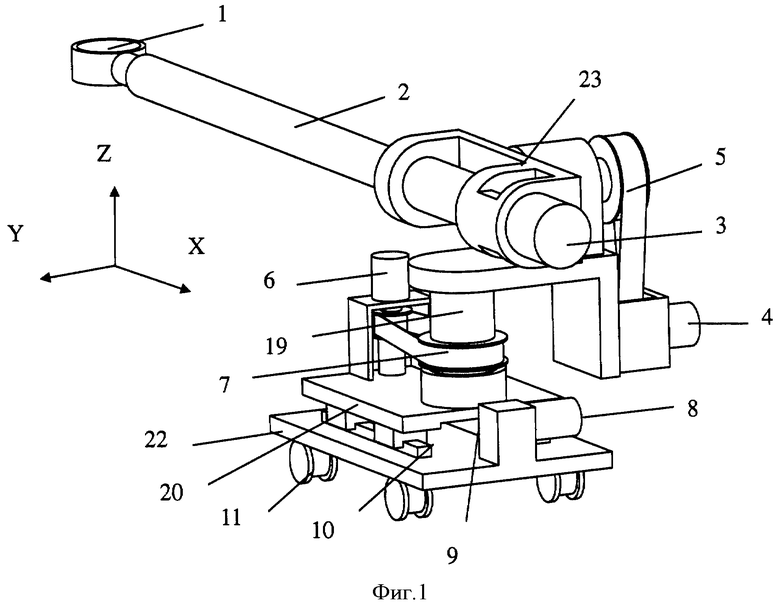
Фигура 1 - структурная схема терапевтического аппарата поворотного типа для лечения сфокусированным ультразвуком высокой интенсивности по настоящему изобретению.
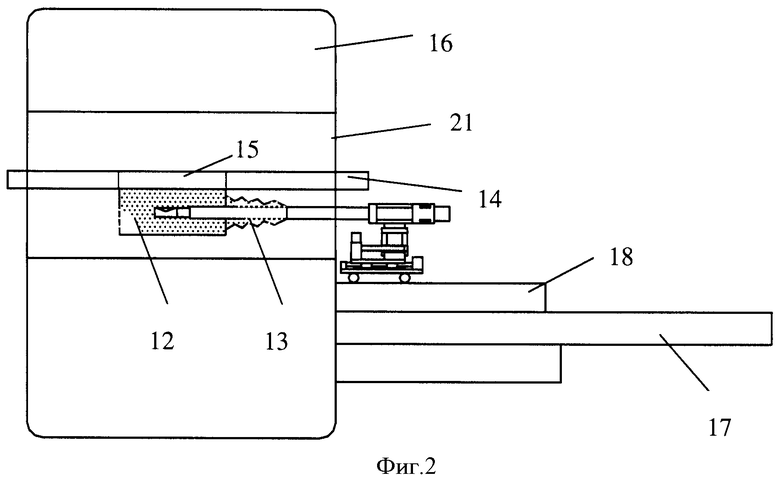
Фигура 2 - структурная схема поворотной терапевтической системы для лечения сфокусированным ультразвуком высокой интенсивности под контролем (ЯМР) по настоящему изобретению.
На фигурах 1, 2: 1 - ультразвуковой датчик; 2 - опорный шток; 3, 4, 6, 8 - двигатель; 5, 7 - синхронизирующий шкив; 9 - резьбовой шток; 10 - линейный направляющий элемент; 11 - скользящее колесо; 12 - водяная камера; 13 - уплотнение; 14 - первая кровать пациента; 15 - отверстие; 16 - аппарат ЯМР; 17 - вторая кровать пациента; 18 - опора; 19 - шток перемещения по оси Y; 20 - опорная плита; 21 - проем ЯМР; 22 - основание; 23 - кронштейн опоры.
Описание предпочтительных вариантов
Настоящее изобретение описано подробно на примере предпочтительного варианта со ссылками на сопровождающие чертежи.
Настоящий вариант представляет собой не ограничивающее воплощение настоящего изобретения.
Как показано на фигуре 1, терапевтический аппарат поворотного типа для лечения сфокусированным ультразвуком высокой интенсивности по настоящему изобретению содержит ультразвуковой датчик 1, который перемещается в различных направлениях перемещающим и ориентирующим механизмом. Перемещающий и ориентирующий механизм имеет механизм поворота с функцией поворота под разными углами, и указанный механизм поворота соединен с опорным штоком 2, при этом другой конец опорного штока 2 соединен с ультразвуковым датчиком 1.
Чтобы уменьшить помехи от терапевтического аппарата поворотного типа для лечения сфокусированным ультразвуком высокой интенсивности на магнитное поле аппарата ЯМР и избежать вредного влияния на качество отображения, опорный шток 2 сделан из немагнитного материала или неметаллического материала. В данном варианте материал опорного штока - полифениленсульфид (PPS).
Ультразвуковой датчик 1 помещен в открытый контейнер с жидкостью или водяную камеру 12, и опорный шток 2 соединен с водяной камерой 12 через гибкое уплотнение 13, при этом водяная камера 12 заполнена жидкостью, которая в этом варианте представляет собой дегазированную воду.
В этом варианте имеются два набора поворотных механизмов, т.е. механизм поворота и перемещения по оси Y и механизм поворота и перемещения по оси Z, которые заставляют ультразвуковой датчик 1 качаться в направлении Y и направлении Z.
Механизм перемещения по оси Y содержит центр поворота на оси Y, шток 19 перемещения по оси Y, соединенный с центром поворота на оси Y, приводное устройство оси Y для вращения центра поворота на оси Y. В этом варианте приводное устройство оси Y имеет двигатель, т.е. двигатель 6, а центр поворота на оси Y имеет шкив синхронизации 7, соединенный с двигателем 6 приводным ремнем.
Механизм перемещения по оси Z содержит центр поворота на оси Z, приводное устройство оси Z для вращения центра поворота на оси Z. В этом варианте приводное устройство оси Z имеет двигатель, т.е. двигатель 4, а центр поворота на оси Z имеет шкив синхронизации 5, соединенный с двигателем 4 приводным ремнем.
Вал шкива синхронизации 5 жестко соединен с опорным кронштейном 23. Опорный шток 2 вращательно соединен с опорным кронштейном 23. В этом варианте приводной механизм для привода опорного штока 2 авторотацией вдоль оси Х имеет двигатель, т.е. двигатель 3, который жестко соединен с опорным кронштейном 23. Выходной вал этого двигателя расположен горизонтально и жестко соединен с опорным штоком 2. Вращение вала двигателя 3 вызывает вращение опорного стержня 2.
Система имеет механизм перемещения по оси X, под указанным механизмом поворота по оси Y. Механизм перемещения по оси Х содержит резьбовой шток 9, расположенный в направлении оси X, опорная плита 20 закреплена на гайке резьбового штока и приводного механизма, т.е. двигателя 8 для привода резьбового штока 9. Указанный механизм перемещения по оси Y установлен на опорной плите 20. Благодаря наличию направляющего паза под опорной плитой 20, и линейного направляющего элемента 10 на основании 22, помещенного в этот паз, механизм поворота может двигаться линейно и реверсивно в направлении X.
Под основанием 22 расположено скользящее устройство, в виде скользящего колеса 11 на основании 22. В этом варианте скользящее колесо 11 является универсальным колесом.
Как показано на фигуре 2, система имеет первую кровать пациента 14 и вторую кровать пациента 17 в проеме 21 аппарата ЯМР 16, при этом первая кровать пациента 14 расположена над второй кроватью пациента 17, причем опора 18, прикрепленная ко второй кровати пациента 17, используется для поддержки терапевтического аппарата поворотного типа для лечения сфокусированным ультразвуком высокой интенсивности по настоящему изобретению, при этом указанный терапевтический аппарат закреплен на опоре 18. Таким образом, формируется поворотная терапевтическая система для лечения сфокусированным ультразвуком высокой интенсивности под контролем ЯМР. В процессе лечения опорный шток 2 может быть введен в проем 21 аппарата ЯМР и расположен под отверстием 15 первой кровати пациента 14. Когда лечение не проводится, опорный шток 2 извлекает ультразвуковой датчик из проема 21 аппарата ЯМР 16, и весь терапевтический аппарат поворотного типа для лечения сфокусированным ультразвуком высокой интенсивности может быть помещен в проем 21 аппарата ЯМР 16 для экономии пространства.
В процессе лечения пациент сначала помещается на первую кровать пациента 14, и патологически измененная ткань, которая будет подвергнута воздействию ультразвука, направлена к отверстию 15, затем конец опорного штока 2, соединенный с ультразвуковым датчиком 1, вводится в проем 21 аппарата ЯМР 16, и ультразвуковой датчик 1 устанавливается под первой кроватью пациента 14 перемещающим и ориентирующим механизмом. Весь перемещающий и ориентирующий механизм закреплен на опоре 18, которая находится за пределами проема аппарата ЯМР, и благодаря многократным перемещениям, область, подверженная воздействию энергии ультразвукового датчика 1, обрабатывается перекрестно с отображением и контролем облучаемой целевой области аппаратом ЯМР 16.
Когда ультразвуковой датчик 1 должен быть перемещен в направлении оси Y, выходной вал двигателя 6 приводит во вращение шкив синхронизации 7 вдоль оси Z и шкив синхронизации 7 приводит в движение весь закрепленный на нем механизм в направлении Y. Двигатель 3 и двигатель 4 также движутся в ограниченном диапазоне хода вместе с механизмом, закрепленным на шкиве синхронизации 7, но двигатель 8 и двигатель 6 не двигаются.
Когда требуется переместить ультразвуковой датчик 1 по оси Z, выходной вал двигателя 4 вращает шкив синхронизации 5 вдоль оси Y и шкив синхронизации 5 перемещает опорный шток 2 в направлении Z. Двигатель 3 перемещается в ограниченном диапазоне хода вместе с опорным штоком 2, но двигатель 6, двигатель 8 и двигатель 4 не двигаются.
Поскольку двигатель имеет весьма ограниченный диапазон хода, когда терапевтический аппарат по настоящему изобретению используется в соединении с аппаратом ЯМР 16, магнитное поле двигателя незначительно влияет на магнитное поле аппарата ЯМР.
Когда ультразвуковой датчик 1 должен быть перемещен по оси Х с приводом от двигателя 8, гайка резьбового штока ведет опорную плиту 20 и размещенный на ней механизм поворота линейно по оси Х вдоль линейного направляющего элемента 10.
Когда угол датчика ультразвука 1, ведомого двигателем 3, должен быть изменен, опорный шток 2 перемещает ультразвуковой датчик 1 авторотацией вдоль оси X.
Если ультразвуковой датчик 1 должен перемещаться вручную, усилие оператора может быть приложено к основанию 22, и универсальное колесо под основанием 22 свободно скользит во всех направлениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВАЯ ТЕРАПЕВТИЧЕСКАЯ СИСТЕМА | 2006 |
|
RU2379074C2 |
| ТЕРАПЕВТИЧЕСКАЯ СИСТЕМА НА ОСНОВЕ СФОКУСИРОВАННОГО УЛЬТРАЗВУКА | 2005 |
|
RU2366475C2 |
| УЛЬТРАЗВУКОВАЯ ТЕРАПЕВТИЧЕСКАЯ СИСТЕМА | 2007 |
|
RU2424014C2 |
| УЛЬТРАЗВУКОВОЕ ТЕРАПЕВТИЧЕСКОЕ УСТРОЙСТВО | 2005 |
|
RU2358780C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СФОКУСИРОВАННОЙ УЛЬТРАЗВУКОВОЙ ТЕРАПИИ ВЫСОКОЙ ИНТЕНСИВНОСТИ | 2005 |
|
RU2359721C2 |
| УЛЬТРАЗВУКОВОЕ ТЕРАПЕВТИЧЕСКОЕ СРЕДСТВО И СИСТЕМА | 2007 |
|
RU2426568C2 |
| УСТРОЙСТВО ГЕНЕРАЦИИ ТЕРАПЕВТИЧЕСКОГО УЛЬТРАЗВУКА И РУЧНОЙ БЛОК ДЛЯ УЛЬТРАЗВУКОВОЙ ТЕРАПИИ, ВКЛЮЧАЮЩИЙ В СЕБЯ УПОМЯНУТОЕ УСТРОЙСТВО | 2020 |
|
RU2796911C1 |
| УЛЬТРАЗВУКОВОЙ ТЕРАПЕВТИЧЕСКИЙ ЗАЖИМ | 2006 |
|
RU2404828C2 |
| КРОВАТЬ РОТАЦИОННО-КИНЕТИЧЕСКАЯ | 2024 |
|
RU2832028C1 |
| Медицинская кровать | 2018 |
|
RU2692896C1 |
Изобретение относится к медицине, а именно к устройствам для ультразвуковой терапии. Управляемая ЯМР ультразвуковая терапевтическая система с фокусированным ультразвуком высокой интенсивности содержит аппарат ЯМР, который имеет проем и первую терапевтическую кровать, помещенную в этот проем, и ультразвуковое терапевтическое устройство с фокусированным ультразвуком высокой интенсивности, которое включает ультразвуковой датчик и перемещающий и ориентирующий механизм этого датчика. Перемещающий и ориентирующий механизм включает механизм поворота, связанный с ультразвуковым датчиком опорным штоком, причем перемещающий и ориентирующий механизм расположен за пределами проема аппарата ЯМР, а опорный шток выполнен с возможностью перемещения в проем аппарата ЯМР. Использование изобретения позволяет повысить качество ультразвукового изображения и снизить помехи, вносимые аппаратом ЯМР. 8 з.п. ф-лы, 2 ил.
1. Управляемая ЯМР ультразвуковая терапевтическая система с фокусированным ультразвуком высокой интенсивности, содержащая аппарат ЯМР, который имеет проем и первую терапевтическую кровать (14), помещенную в этот проем, и ультразвуковое терапевтическое устройство с фокусированным ультразвуком высокой интенсивности, которое включает ультразвуковой датчик (1) и перемещающий и ориентирующий механизм этого датчика, отличающаяся тем, что указанный перемещающий и ориентирующий механизм включает механизм поворота, связанный с ультразвуковым датчиком (1) опорным штоком (2), причем перемещающий и ориентирующий механизм расположен за пределами проема аппарата ЯМР, а указанный опорный шток (2), связанный с указанным перемещающим и ориентирующим механизмом, выполнен с возможностью перемещения в проем аппарата ЯМР.
2. Система по п.1, отличающаяся тем, что указанный механизм поворота содержит механизм перемещения по оси Y, имеющий центр поворота на оси Y, шток перемещения по оси Y, (19) соединенный с центром поворота на оси Y, приводное устройство оси Y для вращения центра поворота на оси Y и опорный шток (2), закрепленный на штоке перемещения по оси Y.
3. Система по п.2, отличающаяся тем, что указанный механизм поворота дополнительно содержит механизм перемещения по оси Z, имеющий центр поворота на оси Z и приводное устройство оси Z для вращения центра поворота на оси Z, и опорный шток (2), закрепленный на центре поворота на оси Z.
4. Система по п.3, отличающаяся тем, что устройства привода по оси Y и оси Z имеют двигатели, а центры поворота на оси Y и на оси Z, соответственно, имеют шкивы синхронизации, соединенные с устройствами привода по оси Y и по оси Z приводным ремнем.
5. Система по п.3, отличающаяся тем, что угол поворота на оси Y или на оси Z опорного штока 2 находится в диапазоне от -40 до +40°.
6. Система по п.3, отличающаяся тем, что указанный механизм поворота дополнительно содержит приводной механизм, который перемещает опорный шток авторотацией вдоль оси X, при этом опорный шток (2) соединен с выходным валом указанного приводного механизма.
7. Система по любому из пп.2-6, отличающаяся тем, что механизм перемещения по оси Х установлен под указанным механизмом поворота, при этом механизм перемещения по оси Х содержит резьбовой шток (9), расположенный в направлении оси X, опорную плиту (20), закрепленную на гайке резьбового штока, а приводной механизм привода резьбового штока установлен на опорной плите (20).
8. Система по п.7, отличающаяся тем, что скользящее устройство расположено под указанной опорной плитой.
9. Система по п.1, отличающаяся тем, что перемещающий и ориентирующий механизм расположен под первой кроватью пациента (14), аппарат ЯМР (16) дополнительно содержит вторую кровать пациента (17), к которой прикреплена опора (18), и перемещающий и ориентирующий механизм расположен на указанной опоре (18).
| US 5044354 A, 03.09.1991 | |||
| US 5443068 А, 22.08.1995 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Система "ExAblate", компания InSightec*, зарегистрировано FDA US 22.10.2004, www.fda | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СИСТЕМА ФОКУСИРОВАННОГО ВОЗДЕЙСТВИЯ УЛЬТРАЗВУКОМ ВЫСОКОЙ ИНТЕНСИВНОСТИ ДЛЯ СКАНИРОВАНИЯ И ЛЕЧЕНИЯ ОПУХОЛЕЙ | 1998 |
|
RU2210409C2 |
| RU 2003101108 A, 20.07.2004. | |||

