ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к области ультразвуковой терапии и к ультразвуковой терапевтической системе, направляемой формирователем изображений и, более конкретно, к ультразвуковой терапевтической системе, способной снижать электромагнитные помехи в формирователе изображений.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Существующая ультразвуковая терапевтическая система объединяет формирователь изображений с ультразвуковым терапевтическим устройством, таким образом, что весь план диагностики и лечения может быть обеспечен пациентам с более высоким качеством и более высокой эффективностью.
Аппарат ЯМР широко применяется в клинической диагностике, поскольку он обеспечивает безопасное, быстрое и точное создание изображений, и формирователь изображений может направлять ультразвуковое терапевтическое устройство. Однако приводные электродвигатели в ультразвуковом терапевтическом устройстве и высокочастотных генераторах в ультразвуковом терапевтическом аппликаторе являются источниками электромагнитных помех и могут вызвать большие помехи в изображениях, создаваемых аппаратом ЯМР.
В ультразвуковом терапевтическом устройстве узел позиционирования ультразвукового терапевтического аппликатора включает многочисленные приводные электродвигатели, чтобы обеспечить перемещение фокальной точки ультразвукового терапевтического аппликатора в трех направлениях.
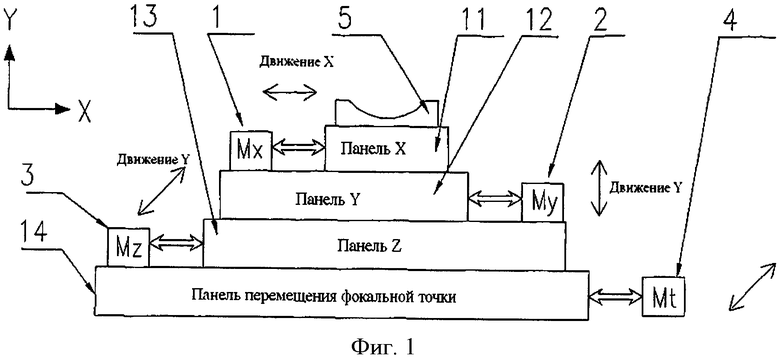
Как показано на фигуре 1, двигатель для терапевтической кровати 4 перемещает терапевтическую кровать (не показана на фигуре 1) и панель перемещения фокальной точки 14. Это обеспечивает ввод терапевтической кровати в проем ЯМР-томографа и выход из него. Панель перемещения фокальной точки 14 несет панели X, Y и Z и их приводные электродвигатели X, Y и Z для приближения к или удаления от аппарата ЯМР.
Приводной электродвигатель Z, обозначенный позицией 3 для панели Z, закреплен на панели перемещения фокальной точки 14. Панель Z 13 установлена на панели перемещения фокальной точки 14, и она может перемещаться по направлению Z.
Приводной электродвигатель Y 2 для панели Y закреплен на панели Z 13. Панель Y 12 установлена на панели Z 13 и может перемещаться в направлении Y относительно панели Z 13.
Приводной электродвигатель Х 1 для панели Х закреплен на панели Y 12. Панель Х 11 установлена на панели Y 12 и может перемещаться в направлении Х относительно панели Y 12.
Ультразвуковой терапевтический аппликатор 5 прикреплен к панели Х 11 и движется вместе с панелью X.
Приводной электродвигатель Z 3 приводит в движение панель Z 13, в направлении Z через зубчатую передачу Z (не показана на фигуре 1). Панель Z приводит в движение панель Y 12, приводной электродвигатель Y 2, панель Х 11, приводной электродвигатель Х 1 и ультразвуковой терапевтический аппликатор 5 в направлении Z. Приводной электродвигатель Y приводит в движение панель Y в направлении Y через зубчатую передачу Y (не показана на фигуре 1). Панель Y приводит в движение приводной электродвигатель Х 1, панель Х 11 и ультразвуковой терапевтический аппликатор 5 в направлении Y. Приводной электродвигатель Х 1 перемещает панель Х 11 в направлении Х через зубчатую передачу Х (не показано на фигуре 1). Панель Х приводит в движение ультразвуковой терапевтический аппликатор 5 в направлении X.
Таким образом, приводные электродвигатели для панелей X, Y и Z соответственно перемещаются во время движения фокальной точки ультразвукового терапевтического аппликатора 5. Поскольку эти двигатели расположены близко к зоне формирования ЯМР-изображений, работа приводных двигателей вызывает электромагнитные помехи, и ферромагнитные материалы, содержащиеся в двигателях при их перемещении, также могут вызвать сильные помехи при формировании ЯМР-изображений.
Во время диагноза и лечения электрический блок управления и высокочастотного генератора, который снабжает энергией, и обеспечивают управление ультразвуковым терапевтическим аппликатором 5 ультразвуковой терапевтической системы, вносят сильные помехи в формирование ЯМР-изображений.
Во время формирования ЯМР-изображений вышеупомянутые факторы электромагнитных помех будут серьезно влиять на точность формирования ЯМР-изображений и, следовательно, будут влиять и на эффективность диагноза и лечения.
Таким образом, для формирователя изображений, используемых для контролируемой аппаратом ЯМР ультразвуковой терапевтической системы, необходимо уменьшить электромагнитные помехи, что важно для работы всей терапевтической системы.
КРАТКОЕ СОДЕРЖАНИЕ ИЗОБРЕТЕНИЯ
Принимая во внимание упомянутые выше недостатки известного уровня техники, техническая проблема, которая должна быть решена в настоящем изобретении, состоит в том, чтобы создать ультразвуковую систему терапии, которая может эффективно снизить электромагнитные помехи до входа в формирователь изображений. Соответственно, должна быть реализована ультразвуковая система с электромагнитной совместимостью между ультразвуковым терапевтическим устройством и формирователем изображений (аппарат ЯМР).
В соответствии с настоящим изобретением предложено следующее техническое решение проблемы: ультразвуковая терапевтическая система, способная снизить электромагнитные помехи до входа в формирователь изображений, включает формирователь изображений, ультразвуковое терапевтическое устройство и электрический блок управления. Ультразвуковое терапевтическое устройство содержит ультразвуковой терапевтический аппликатор и узел его позиционирования. Указанный узел позиционирования содержит приводные электродвигатели, обеспечивающие движение ультразвукового терапевтического аппликатора. При этом приводной электродвигатель расположен вне области, в которой электромагнитные волны от двигателей могут вызвать электромагнитные помехи в формирователе изображений. Приводной электродвигатель связан с ультразвуковым терапевтическим аппликатором через зубчатый механизм.
Вращающий момент от приводного электродвигателя может быть передан на зубчатый механизм через длинный вал, и затем этот вращающий момент передается на ультразвуковой терапевтический аппликатор от зубчатого механизма. Таким образом, приводной электродвигатель может находиться далеко от участка создания изображения аппарата ЯМР, чтобы можно было избежать попадания электромагнитных помех в формирователь изображений.
Приводные электродвигатели расположены на расстоянии 2 м от центральной точки зоны создания изображений формирователем изображений.
Указанный узел позиционирования может включать панель X, и ультразвуковой терапевтический аппликатор расположен на этой панели X. Приводной электродвигатель связан с панелью Х через зубчатый механизм, и указанный приводной электродвигатель представляет собой приводной электродвигатель X, который перемещает панель Х в направлении X.
Указанный узел позиционирования может дополнительно содержать панель Y и приводной электродвигатель Y, который используется для перемещения панели Y в направлении Y. Указанная панель Х расположена на панели Y. Приводной электродвигатель Y помещен на расстоянии 2 м от центральной точки зоны создания изображений формирователем изображений, и он связан с панелью Y через зубчатый механизм Y.
Указанный узел позиционирования дополнительно может содержать панель Z и приводной электродвигатель Z, который используется для перемещения панели Z в направлении Z. Указанная панель Y расположена на панели Z. Приводной электродвигатель Z находится на расстоянии 2 м от центральной точки зоны создания изображений формирователем изображений и связан с панелью Z через зубчатый механизм Z.
Для того чтобы обеспечить легкий ввод ультразвукового терапевтического аппликатора в проем формирователя изображений панель Z может быть размещена на панели перемещения фокальной точки, и двигатель для терапевтической кровати используется для управления движением панели перемещения фокальной точки.
Все упомянутые выше приводные электродвигатели выполняют функцию серводвигателей.
В настоящем изобретении каждый приводной электродвигатель расположен на определенном расстоянии от зоны создания изображений формирователем изображений, и вращающий момент передается ультразвуковому терапевтическому аппликатору соответствующим зубчатым устройством. Во время настройки положения фокальной точки ультразвукового терапевтического аппликатора положения всех приводных двигателей остаются неизменными. Так как приводные электродвигатели расположены далеко от зоны создания изображений формирователем изображений, воздействие электромагнитных помех на формирователь изображений может быть сведено к минимуму.
В настоящем изобретении формирователь изображений предназначен, главным образом, для аппарата ЯМР; конечно, в настоящем изобретении также могут использоваться и другие формирователи изображений.
В ультразвуковой терапевтической системе электрический блок управления при работе также создает электромагнитные помехи, которые будут влиять на точность диагностики с помощью формирователя изображений. Чтобы повысить точность ЯМР-диагностики, очень важно снизить электромагнитные помехи, производимые электрическим блоком управления в работающем аппарате ЯМР. С этой целью предпочтительный электрический блок управления может дополнительно содержать еще один блок управления для того, чтобы управлять движением терапевтической кровати. Электрический блок управления для управления движением терапевтической кровати снабжен датчиком положения, который выключает питание электрического блока управления для управления движением терапевтической кровати после того, как терапевтическая кровать входит в зону создания изображений формирователем изображений. После того как терапевтическая кровать приблизилась к аппарату ЯМР, эта терапевтическая кровать должна продолжить движение в проем аппарата ЯМР для диагноза и ультразвукового лечения. Если электрический блок управления, управляющий движением терапевтической кровати в пределах аппарата ЯМР, обесточен во время диагноза и лечения, электромагнитные помехи на аппарат ЯМР от этого электрического блока эффективно снижаются. Когда терапевтическая кровать выходит из аппарата ЯМР, электрический блок управления может быть повторно включен.
Предпочтительно, чтобы электрический блок управления дополнительно содержал бы несколько фильтров нижних частот с высоким удельным коэффициентом затухания. Фильтры могут фильтровать электромагнитные волны источника питания высокочастотного генератора, электрических компонентов, контроллера для системы движения, серводвигателя и источника питания приводного электродвигателя соответственно с тем, чтобы электромагнитные помехи с частотой вблизи рабочей частоты аппарата ЯМР могли быть снижены.
Фильтры в настоящем изобретении, в основном, фильтруют электромагнитные волны выше 10 МГц, создаваемые ультразвуковым терапевтическим устройством. Коэффициент ослабления фильтра колеблется от 80 дБ до 120 дБ.
Для главных источников помех (например, источника питания высокочастотного генератора, приводных двигателей), предприняты меры экранирования этих узлов. Настоящее изобретение также использует методику отсекающего волновода на месте (например, отверстия в выходном валу приводного электродвигателя, место, где управляющие сигналы входят и выходят из экрана), которое не может быть экранировано по какой-либо причине. Отсекающая волноводная трубка может иметь вид простой трубчатой металлической конструкции и иметь электрические характеристики фильтров верхних частот. Отсекающая волноводная трубка пропускает сигналы с частотой выше частоты отсечки и блокирует или ослабляет сигналы с частотой ниже частоты отсечки. При этом частота отсечки волноводной трубки рассчитана таким образом, что частота сигналов помехи входит в область отсечки волноводной трубки, и эти сигналы помехи не могут пройти через волноводную трубку, так что волноводная трубка действует как электромагнитный экран. Отсекающая волноводная трубка по настоящему изобретению может фильтровать помехи в виде электромагнитных волн с частотой ниже 100 МГц, и ее коэффициент ослабления лежит в пределах от 80 до 120 дБ.
Внешняя оболочка каждого приводного электродвигателя может быть снабжена экранирующей крышкой, которая может экранировать электромагнитные волны. Отсекающий волновод, который может снизить воздействие электромагнитных волн, выполнен на выходном валу каждого приводного электродвигателя, и он соединен с экранирующей крышкой и заземлен. Положительная и отрицательная клеммы цепи питания каждого приводного электродвигателя соединены с фильтрами.
Кроме того, приводные электродвигатели и ультразвуковой терапевтический аппликатор могут быть помещены в экранированную камеру для того, чтобы экранировать электромагнитные волны. В этой же камере расположен формирователь изображений. Во-первых, положительная и отрицательная клеммы приводного электродвигателя соответственно соединены с фильтром, расположенным в экранированной камере. Затем указанный фильтр соединяется с другим фильтром, расположенным за пределами экранированной камеры. Ультразвуковой терапевтический аппликатор соединен с высокочастотным генератором через фильтр, расположенный за пределами экранированной камеры. Экранирующие крышки и внешняя оболочка приводных двигателей соответственно соединены с экранированной камерой через заземление в одной точке. Заземление экранированной камеры дополнительно снижает электромагнитные помехи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фигура 1 - блок-схема механизма перемещения в ультразвуковой терапевтической системе известного уровня техники.
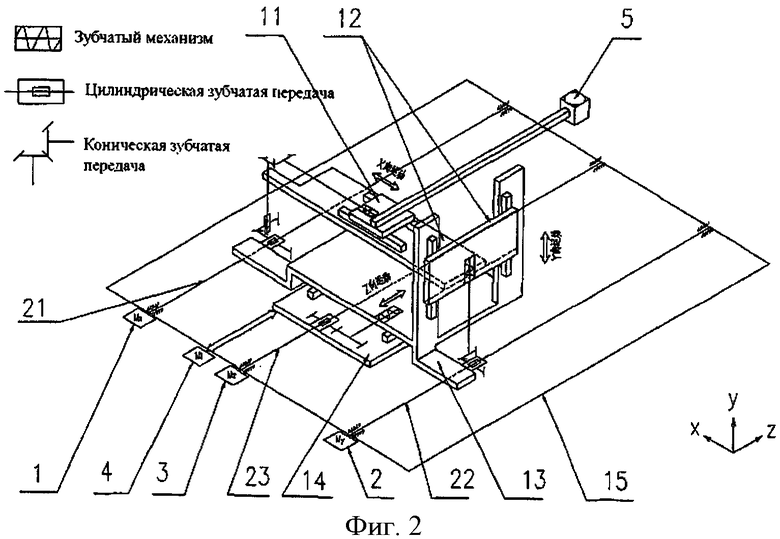
Фигура 2 - расположение двигателей, используемых в ультразвуковой терапевтической системе по настоящему изобретения.
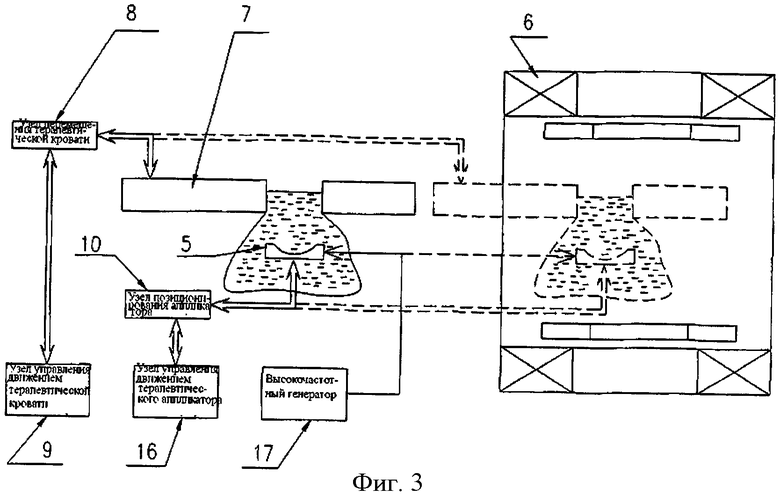
Фигура 3 - блок-схема электрического блока управления по настоящему изобретению.
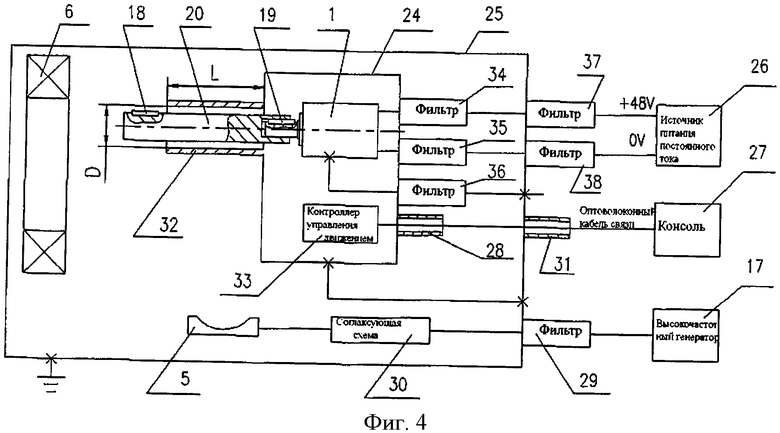
Фигура 4 - принципиальная схема экранирования и фильтрации помех, принятая в настоящем изобретении.
Обозначения: 1 - приводной электродвигатель X, 2 - приводной электродвигатель Y, 3 - приводной электродвигатель Z, 4 - двигатель для терапевтической кровати, 5 - ультразвуковой терапевтический аппликатор, 6 - аппарат ЯМР, 7 - терапевтическая кровать, 8 - подвижный узел терапевтической кровати, 9 - электрический блок управления движением терапевтической кровати, 10 - узел позиционирования, 11 - панель X, 12 - панель Y, 13 - панель Z, 14 - панель перемещения фокальной точки, 15 - станина терапевтической кровати, 16 - электрический блок управления узла позиционирования, 17 - высокочастотный генератор, 18, 19 - ведущие шпонки, 20 - соединительный привод, 21 - вал X, 22 - вал Y, 23 - вал Z прикрытие, 24 - экранирующая крышка моторного отсека, 25 - экранированная камера, 26 - источник питания постоянного тока, 27 - консоль, 28 - отсекающая волноводная трубка, 29 - фильтр, 30 - согласующая схема, 31, 32 - отсекающие волноводные трубки, 33 - контроллер движения, 34, 35, 36, 37, 38 - фильтры.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ
Настоящее изобретение будет далее описано более подробно на примере предпочтительных вариантов со ссылками на сопровождающие чертежи.
Ультразвуковая терапевтическая система по настоящему изобретению содержит аппарат ЯМР 6 (формирователь изображений), ультразвуковое терапевтическое устройство и электрический блок управления. При этом ультразвуковое терапевтическое устройство содержит терапевтическую кровать 7, ультразвуковой терапевтический аппликатор 5 и узел его позиционирования.
Как показано на фигуре 2, узел позиционирования ультразвукового терапевтического аппликатора 5 содержит панель Х 11, на которой размещен ультразвуковой терапевтический аппликатор 5; приводной электродвигатель Х 1, соединенный с панелью Х 11 через зубчатый механизм X; панель Y 12; приводной электродвигатель Y 2; соединенный с панелью Y 12 через зубчатый механизм Y; панель Z 13; приводной электродвигатель Z 3, соединенный с панелью Z 13 через зубчатый механизм Z; панель перемещения фокальной точки 14 и двигатель для терапевтической кровати 4 для перемещения панели фокальной точки 14 в направлении Z.
Панель Х 11 установлена на панели Y 12, панель Y 12 соединена с панелью Z 13, и панель Z 13 расположена на панели перемещения фокальной точки 14.
В этом варианте воплощения приводной электродвигатель Х 1, приводной электродвигатель Y 2 и приводной электродвигатель Z 3 установлены на станине 15 терапевтической кровати, и они обычно находятся на расстоянии 2 м от центральной точки зоны создания изображения аппаратом ЯМР. Приводной электродвигатель Х 1, приводной электродвигатель Y 2 и приводной электродвигатель Z 3, соответственно, соединены с зубчатыми механизмами X, Y и Z через вал Х 21, вал Y 22 и вал Z 23. В этом варианте воплощения изобретения все приводные электродвигатели являются исполнительными двигателями. Вал Х 21, вал Y 22 и вал Z 23 имеют длинные валы. Когда длинный вал вращается, он передает вращающий момент зубчатому механизму, и когда длинный вал не вращается, зубчатый механизм может перемещаться по оси относительно длинного вала. Вал Х 21, вал Y 22 и вал Z 23 установлены на станине 15 терапевтической кровати. Ультразвуковой терапевтический аппликатор 5 прикреплен к панели Х 11 и движется вместе с панелью Х 11.
Зубчатый механизм Х содержит привод с ведущей шпонкой, который проходит в направлении Z, механизм с конической зубчатой передачей и механизм с винтовой зубчатой передачей. Три зубчатых механизма передают вращающий момент от приводного электродвигателя Х последовательно. Указанный привод с ведущей шпонкой соединен с валом Х 21. На валу Х 21 имеется паз под ведущую шпонку. Длина паза под ведущую шпонку определена диапазоном перемещения терапевтической кровати и диапазоном перемещения фокальной точки ультразвукового терапевтического аппликатора в направлении Z. Когда панель Z 13 перемещается в направлении Z (т.е. в направлении отверстия аппарата ЯМР), шпоночный паз может перемещаться в направлении Z. Когда вал Х 21 вращается, вращающий момент может быть передан механизму с конической зубчатой передачей через привод с ведущей шпонкой и затем передан с механизма с конической зубчатой передачей на механизм с винтовой зубчатой передачей. Наконец, механизм с винтовой зубчатой передачей приводит в движение панель Х 11 для перемещения ультразвукового терапевтического аппликатора 5 в направлении X. Механизм с винтовой зубчатой передачей содержит панель Х 11, соединенную с механизмом с конической зубчатой передачей шнеком, при этом направляющая штанга, соединенная с панелью Y 12, обеспечивает перемещение в направлении X. Панель Х 11 может перемещаться линейно в направлении Х вдоль направляющей штанги.
Конструкция зубчатого механизма Y и зубчатого механизма Z аналогичны конструкции зубчатого механизма X и различие заключается только в различном направлении их вращения.
Двигатель для терапевтической кровати 4 расположен на конце станины терапевтической кровати 15, который удален от аппарата ЯМР.
Рабочий процесс указанного ультразвукового терапевтического устройства осуществляется следующим образом:
Двигатель для терапевтической кровати 4 перемещает фокальную точку, перемещая панель 14. Панель перемещения фокальной точки 14 несет установленный на ней зубчатый механизм Z для движения вала 23 вдоль оси Z. Панель Z 13 перемещается вместе с панелью перемещения фокальной точки 14 и также несет зубчатый механизм Y и зубчатый механизм Х для перемещения соответственно вала 22 вдоль оси Y и вала 21 вдоль оси X. В то же время, панель Х 11, панель Y 12 и ультразвуковой терапевтический аппликатор 5, сопровождаемый терапевтической кроватью 7, входит в аппарат ЯМР или выходит из него.
Приводной электродвигатель Z 3 вращает вал Z 23. Вал Z 23 перемещает панель Z 13 в направлении Z с помощью зубчатого механизма Z (привод с ведущей шпонкой, механизм с конической зубчатой передачей и механизм с винтовой зубчатой передачей). Панель Z 13 перемещает панель Y 12, зубчатый механизм Y, панель Х 11 и зубчатый механизм Х в направлении Z и, соответственно, приводит в движение ультразвуковой терапевтический аппликатор 5 в направлении Z.
Приводной электродвигатель Y 2 вращает вал Y 22. Вал Y 22 перемещает панель Y 12 в направлении Y через зубчатый механизм Y (привод с ведущей шпонкой, механизм с конической зубчатой передачей и механизм с винтовой зубчатой передачей). Панель Y перемещает панель Х 11 через зубчатый механизм Х в направлении Y и, соответственно, приводит в движение ультразвуковой терапевтический аппликатор 5 в направлении Y.
Приводной электродвигатель Х 1 вращает вал Х 21. Вал Х 21 перемещает панель Х 11 в направлении Х через зубчатый механизм Х (привод с ведущей шпонкой, механизм с конической зубчатой передачей и механизм с винтовой зубчатой передачей) и, соответственно, приводит в движение ультразвуковой терапевтический аппликатор 5 в направлении X.
Приводные электродвигатели Z, X, Y заставляют фокальную точку ультразвукового терапевтического аппликатора 5 перемещаться в направлениях X, Y, место направления Z. Во время ультразвуковой терапии положения трех двигателей остаются неизменяемыми.
Приводные электродвигатели расположены далеко от зоны создания изображения аппарата ЯМР с тем, чтобы снизить электромагнитные помехи на аппарат ЯМР при работе приводных электродвигателей, и при перемещении приводных электродвигателей влияния электромагнитных волн при лечении в аппарате ЯМР вообще можно избежать.
Как показано на фигуре 3, относительно аппарата ЯМР 6, ультразвуковое терапевтическое устройство, управляемое ЯМР, может быть расположено за пределами аппарата ЯМР или внутри аппарата ЯМР.
При этом электрический блок управления состоит из двух блоков управления, один из которых служит для управления движением терапевтической кровати 9 и другой для управления движением узла позиционирования 16 ультразвукового терапевтического аппликатора. При этом электрический блок управления движением терапевтической кровати 9 используется для управления подвижным узлом терапевтической кровати 8. Электрический блок управления движением узла позиционирования 16 используется для управления узлом позиционирования 10 ультразвукового терапевтического аппликатора.
Датчик положения (не показан) установлен в соответствующем месте в аппарате ЯМР 6. Этот датчик положения обеспечивает выключение электрического блока управления движением терапевтической кровати 9 после того, как терапевтическая кровать 7 войдет в зону создания изображений аппаратом ЯМР 6.
В настоящем изобретении приняты определенные меры для нейтрализации главных источников помех ультразвуковой терапевтической системы в виде экранирования и фильтрации. Как показано на фигуре 4, аппарат ЯМР помещен в экранированную камеру 25, которая не пропускает электромагнитные волны. Приводные электродвигатели и контроллеры движения также помещены в экранированную камеру 25. Источник питания постоянного тока 26, консоль 27 и высокочастотный генератор 17 расположены за пределами экранированной камеры 25. Экранированная камера 25 и экранирующая крышка 24 моторного отсека сделана из магнитного материала высокой проницаемости с высокой удельной электропроводностью, которой очень эффективно экранируют электромагнитные волны. В этом варианте воплощения экранирующая крышка 24 для моторного отсека сделана из нержавеющей стали. На чертежах приводной электродвигатель Х 1 взят в качестве примера.
Поскольку фильтры используются на обоих концах кабеля и экранная защита от электромагнитных волн может быть улучшена, «плюс» и «минус» источника питания постоянного тока 26 соединены с фильтром 37, фильтром 34 и фильтром 38, фильтром 35 для фильтрации излучений и затем соответственно соединены с положительной и отрицательной клеммами приводного электродвигателя Х 1. Внешняя оболочка приводного электродвигателя Х 1 соединена с экранированной камерой 25 через фильтр 36, и экранирующая крышка 24 моторного отсека соединена с экранированной камерой 25. Поскольку только в этом месте частота источника помехи, подлежащей удалению, ниже 10 МГц, экранирующая крышка 24 моторного отсека и внешней оболочки приводного электродвигателя Х 1 соответственно соединены с экранированной камерой 25 посредством заземления в одной точке. Экранированная камера 25 заземлена.
Отсекающая волноводная трубка 32 находится за пределами выходного вала приводного электродвигателя Х 1 благодаря использованию электрических особенностей фильтров верхних частот отсекающей волноводной трубки. Отсекающая волноводная трубка 32 соединена с экранирующей крышкой 24 моторного отсека. Выходной вал приводного электродвигателя Х 1 передает вращающий момент через ведущую шпонку 19 соединительному приводу 20. Затем соединительный привод 20 передает вращающий момент через ведущую шпонку 18 на вал Х 21 (не показан). Соединительный привод 20 выполнен из неметаллического материала. Контроллер движения 33 используется для управления каждым узлом позиционирования и электрическим блоком управления настоящей ультразвуковой терапевтической системы. Консоль 27 контролирует движение мониторов 33 через оптоволоконный кабель. Отсекающая волноводная трубка 31 и отсекающая волноводная трубка 28 соответственно установлены в местах, где оптоволоконный кабель входит в экранированную камеру 25 и в экранирующую крышку 24 моторного отсека. Выходные сигналы высокочастотного генератора 17 проходят через фильтр 29, согласующую схему 30 и затем поступают в ультразвуковой терапевтический аппликатор 5. При этом внешняя оболочка приводного электродвигателя Х 1 через фильтр 36, отсекающие волноводные трубки 28, 31 и 32, экранирующая крышка 24 моторного отсека и экранированная камера 25 заземлены способом заземления в одной точке.
В этом варианте воплощения фильтры представляют собой фильтры нижних частот с высоким коэффициентом ослабления. Фильтры, главным образом, фильтруют и экранируют электромагнитные волны с частотой выше 10 МГц, создаваемые источником питания и высокочастотным генератором. Его коэффициент ослабления лежит в диапазоне от 80 дБ до 120 дБ. В этом варианте воплощения фильтр 34, фильтр 35, фильтр 36, фильтр 37 и фильтр 38 являются фильтрами нижних частот.
В этом варианте воплощения фильтры нижних частот могут фильтровать электромагнитные волны с частотой выше 10 МГц с ослаблением 100 дБ, Таким образом, после фильтрования остаточные электромагнитные помехи в аппарате ЯМР находятся в пределах диапазона, который не будет влиять на точность ЯМР-диагноза. Поэтому, остаточные электромагнитные волны после фильтрования в ЯМР могут быть эффективно восстановлены.
В этом варианте воплощения, согласно рабочей частоте электромагнитных волн, аппарат ЯМР настроен на частоту f сигналов помехи в пределах от 10 МГц к 100 МГц. Согласно частоте отсечки fc=(3~5)×f частота отсечки отсекающих волноводных трубок 31 и 32 находится в пределах от 300 МГц до 500 МГц.
Для отсекающей волноводной трубки круглого поперечного сечения:
где D - диаметр отсекающей волноводной трубки, мм;
fc - частота отсечки, MГц.
Ослабление S для отсекающей волноводной трубки круглого поперечного сечения:
где S - величина ослабления, дБ;
L - длина отсекающей волноводной трубки, мм;
D - диаметр отсекающей волноводной трубки, мм.
В этом варианте воплощения f составляет 100 МГц, fc 500 MГц, С - 100 дБ.
В предположении использования отношений
 и
и 
с учетом пространственной структуры, диаметр (D) и длина (L) отсекающей волноводной трубки 32 определяются как D=30 мм и L=100 мм.
При установке отсекающих волноводных трубок на выходном валу приводного электродвигателя может быть достигнуто ослабление в пределах от 80 дБ к 120 дБ для электромагнитных волн с частотой ниже 100 МГц и помехи в ЯМР могут быть эффективно снижены.
В процессе ультразвукового диагноза и лечения под контролем электрического блока управления движением терапевтической кровати 9 узел движения терапевтической кровати 8 перемещает терапевтическую кровать 7 и ультразвуковой терапевтический аппликатор 5 в проем аппарата ЯМР 6. После лечения кровать 7 входит в контакт с датчиком положения, электрический блок управления движением терапевтической кровати 9 выключается, и терапевтическая кровать 7 будет находиться в устойчивом и неизменным положении во время ультразвукового диагноза и лечения. Электрический блок управления движением 16 узла позиционирования перемещает узел 10, который выводит фокальную точку ультразвукового терапевтического аппликатора 5 в трехмерное пространство для того, чтобы применить ультразвуковую терапию к больному органу пациента.
В настоящем изобретении, после того как терапевтическая кровать 7 и ультразвуковой терапевтический аппликатор 5 войдут в проем аппарата ЯМР 6 и перед снятием изображений аппаратом ЯМР 6, электрический блок управления движением терапевтической кровати 9 обесточен и, следовательно, можно избежать электромагнитных помех в ЯМР, наводимых этим видом электрических устройств в работающем состоянии.
После завершения диагностики и лечения или когда требуется переместить терапевтическую кровать 7, подача электропитания в электрический блок управления движением терапевтической кровати 9 может быть возобновлена с помощью переключателя, и подвижный узел терапевтической кровати 8 приводится в действие и извлекает терапевтическую кровать 7 из аппарата ЯМР 6.
Путем выключения электропитания к электрическому блоку управления электромагнитные помехи на аппарат ЯМР 6 могут быть эффективно снижены.
Таким образом, ультразвуковая терапевтическая система по настоящему изобретению может значительно снизить электромагнитные помехи и реализовать полную электромагнитную совместимость ультразвукового терапевтического устройства и аппарата ЯМР.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОВОРОТНАЯ ТЕРАПЕВТИЧЕСКАЯ СИСТЕМА ДЛЯ ЛЕЧЕНИЯ СФОКУСИРОВАННЫМ УЛЬТРАЗВУКОМ ВЫСОКОЙ ИНТЕНСИВНОСТИ И ТЕРАПЕВТИЧЕСКИЙ АППАРАТ ПОВОРОТНОГО ТИПА | 2006 |
|
RU2386461C2 |
| ТЕРАПЕВТИЧЕСКАЯ СИСТЕМА НА ОСНОВЕ СФОКУСИРОВАННОГО УЛЬТРАЗВУКА | 2005 |
|
RU2366475C2 |
| УЛЬТРАЗВУКОВОЕ ТЕРАПЕВТИЧЕСКОЕ УСТРОЙСТВО | 2005 |
|
RU2358780C2 |
| УЛЬТРАЗВУКОВОЕ ТЕРАПЕВТИЧЕСКОЕ СРЕДСТВО И СИСТЕМА | 2007 |
|
RU2426568C2 |
| СИСТЕМА ФОКУСИРОВАННОГО ВОЗДЕЙСТВИЯ УЛЬТРАЗВУКОМ ВЫСОКОЙ ИНТЕНСИВНОСТИ ДЛЯ СКАНИРОВАНИЯ И ЛЕЧЕНИЯ ОПУХОЛЕЙ | 1998 |
|
RU2210409C2 |
| ВИБРАЦИОННАЯ КРОВАТЬ ФАДЕЕВЫХ | 2005 |
|
RU2283639C1 |
| АППАРАТ ДЛЯ ТРЕХМЕРНОГО ЛЕЧЕБНОГО ВОЗДЕЙСТВИЯ НА ПОЗВОНОЧНИК | 1997 |
|
RU2193384C2 |
| Медицинская кровать | 2019 |
|
RU2696105C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СТАНЦИЯ | 2014 |
|
RU2657958C2 |
| УСТРОЙСТВО ЗАЩИТЫ УЗКОПОЛОСНЫХ ПРИЕМНО-ПЕРЕДАЮЩИХ КАНАЛОВ РАДИОТЕХНИЧЕСКИХ СИСТЕМ | 2012 |
|
RU2513706C2 |
Изобретение относится к медицинской технике, а именно к устройствам для ультразвуковой терапии. Ультразвуковая система содержит формирователь изображений, ультразвуковое терапевтическое устройство и электрический блок управления. Ультразвуковое терапевтическое устройство включает ультразвуковой терапевтический аппликатор и узлы его позиционирования. Приводные двигатели для управления движением ультразвукового терапевтического аппликатора расположены в узлах позиционирования, при этом приводные двигатели расположены вне области, где электромагнитные волны приводных двигателей могут вызвать помехи в формирователе изображений. Приводные двигатели связаны с ультразвуковым терапевтическим аппликатором через зубчатые механизмы. Внешняя оболочка каждого приводного электродвигателя закрыта экранирующей крышкой моторного отсека. Отсекающая волноводная трубка установлена на выходном валу каждого приводного двигателя и подключена к экранирующей крышке моторного отсека. Использование изобретения позволяет снизить помехи МР-томографу при его работе. 13 з.п. ф-лы, 4 ил.
1. Ультразвуковая терапевтическая система, содержащая формирователь изображений, ультразвуковое терапевтическое устройство и электрический блок управления; при этом ультразвуковое терапевтическое устройство содержит ультразвуковой терапевтический аппликатор (5), узел его позиционирования, имеющий приводные электродвигатели управления движением ультразвукового терапевтического аппликатора, которые расположены вне области, в которой электромагнитные волны приводных двигателей вносят электромагнитные помехи в формирователь изображений, причем приводные электродвигатели связаны с ультразвуковым терапевтическим аппликатором (5) через зубчатые механизмы, а внешняя оболочка каждого приводного электродвигателя закрыта экранирующей крышкой моторного отсека, который экранирует электромагнитные волны, и отсекающая волноводная трубка (32), ослабляющая электромагнитные волны, установленная на выходном валу каждого приводного двигателя, подключена к экранирующей крышке моторного отсека (24), и заземлена на одном конце.
2. Ультразвуковая терапевтическая система по п.1, в которой приводные электродвигатели расположены на расстоянии 2 м от центральной точки зоны создания изображений формирователем изображений.
3. Ультразвуковая терапевтическая система по п.1, в которой указанный узел позиционирования дополнительно содержит панель Х (11) и ультразвуковой терапевтический аппликатор (5), установленный на панели X; приводной электродвигатель соединен с панелью Х через зубчатый механизм X, и указанный приводной электродвигатель Х (1) перемещает панель Х в направлении X.
4. Ультразвуковая терапевтическая система по п.3, в которой указанный узел позиционирования дополнительно содержит панель Y (12) и приводной двигатель Y (2), который используется для перемещения панели Y в направлении Y; указанная панель Х (11) расположена на панели Y, и приводной электродвигатель Y находится на расстоянии 2 м от центральной точки зоны создания изображений формирователем изображений, и соединен с панелью Y через зубчатый механизм Y.
5. Ультразвуковая терапевтическая система по п.4, в которой указанный узел позиционирования дополнительно содержит панель Z (13) и приводной двигатель Z (3), который используется для перемещения панели Z в направлении Z; указанная панель Y (12) расположена на панели Z (13), и приводной электродвигатель Z находится на расстоянии 2 м от центральной точки зоны создания изображений формирователем изображений, и соединен с панелью Z через зубчатый механизм Z.
6. Ультразвуковая терапевтическая система по п.5, в которой панель Z (13) расположена на панели (14), перемещающий фокальную точку, при этом двигатель для терапевтической кровати (4) используется для управления движением панели (14), перемещающий фокальную точку.
7. Ультразвуковая терапевтическая система по пп.1-6, в которой приводные двигатели и ультразвуковой терапевтический аппликатор (5) размещены в экранированной камере (25) формирователя изображений, экранирующей электромагнитные волны; экранирующие крышки для моторного отсека (24) и внешние оболочки приводных двигателей соответственно подключены к экранированной камере (25) и заземлены в одной точке, причем экранированная камера (25) также заземлена.
8. Ультразвуковая терапевтическая система по любому из пп.1-6, в которой электрический блок управления включает электрический блок (9) управления движением терапевтической кровати для управления движением терапевтической кровати (7), электрический блок (9) управления движением терапевтической кровати имеет датчик положения, который выключает питание электрического блока управления движением терапевтической кровати после того, как терапевтическая кровать (7) входит в зону создания изображений формирователем изображений.
9. Ультразвуковая терапевтическая система по п.8, в которой электрический блок управления дополнительно включает множество фильтров нижних частот с относительно высоким коэффициентом ослабления для фильтрации электромагнитных волн, излучаемых высокочастотным генератором (17), который является источником питания ультразвукового терапевтического аппликатора, и приводными двигателями.
10. Ультразвуковая терапевтическая система по п.9, в которой указанный фильтр имеет коэффициент ослабления в пределах от 80 дБ до 120 дБ для электромагнитных волн с частотой выше 10 МГц.
11. Ультразвуковая терапевтическая система по п.9, в которой внешняя оболочка каждого приводного двигателя имеет экранирующую крышку моторного отсека (24), которая может экранировать электромагнитные волны; отсекающий волновод (32), который может ослабить электромагнитные волны, расположенный на выходном валу каждого приводного двигателя, при этом отсекающий волновод (32) соединен одним концом с экранирующей крышкой моторного отсека (24) и заземлен; отрицательная и положительная клеммы каждого приводного двигателя подключены через фильтры.
12. Ультразвуковая терапевтическая система по п.11, в которой приводные двигатели и ультразвуковой терапевтический аппликатор (5) помещены в экранированную камеру (25) формирователя изображений, которая может экранировать электромагнитные волны; отрицательная и положительная клеммы каждого приводного двигателя соответственно подключены к фильтрам, расположенным в экранированной камере (25), и затем указанный фильтр соединяется с фильтром, расположенным за пределами экранированной камеры (25); ультразвуковой терапевтический аппликатор (5) соединен с высокочастотным генератором (17) через фильтр, расположенный за пределами экранированной камеры (25); экранирующая крышка моторного отсека (24) и внешние оболочки приводных двигателей соответственно соединены с экранированной камерой (25) через заземление в одной точке, и сама экранированная камера (25) заземлена.
13. Ультразвуковая терапевтическая система по п.11, в которой указанная отсекающая волноводная трубка (32) имеет коэффициент ослабления в пределах от 80 дБ до 120 дБ для электромагнитных волн с частотой ниже 100 МГц.
14. Ультразвуковая терапевтическая система по любому из пп.1-6, в которой указанный формирователь изображений представляет собой аппарат ЯМР.
| US 5044354 А, 03.09.1991 | |||
| US 2006104422 A1, 18.05.2006 | |||
| US 5443068 A, 22.08.1995 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Система "ExAblate", компания InSightec*, зарегестрировано FDA US 22.10.2004, www.fda.gov/bbs/topics/ANSWERS/2004/ANS01319.html, найдено в Интернет 17.07.2008 | |||
| СИСТЕМА ФОКУСИРОВАННОГО ВОЗДЕЙСТВИЯ УЛЬТРАЗВУКОМ ВЫСОКОЙ ИНТЕНСИВНОСТИ ДЛЯ СКАНИРОВАНИЯ И ЛЕЧЕНИЯ ОПУХОЛЕЙ | 1998 |
|
RU2210409C2 |
| RU 2003101108 A, 20.07.2004. | |||

