Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления газотурбинными двигателями (ГТД).
Известен способ управления ГТД, реализованный в электронно-гидромеханической САУ супервизорного типа [1]. Способ заключается в том, что с целью повышения точности управления управляющее воздействие гидромеханического регулятора корректируется в ограниченном диапазоне электронным корректором.
Недостатком известного способа является его низкая эффективность.
Наиболее близким к данному изобретению по технической сущности является способ управления ГТД, реализованный, например, в электронно-гидромеханической САУ двигателя ТВ7-117, входящего в силовую установку (СУ) самолета Ил-114 [2].
САУ содержит двухканальный электронный регулятор (ЭР), резервный гидромеханический регулятор (ГМР), селектор и блок исполнительных элементов (ИЭ).
Способ заключается в том, что контролируют показания одноименных датчиков на допустимый диапазон, в случае если показания одноименных датчиков находятся внутри допустимого диапазона, сравнивают показания одноименных датчиков между собой, если показания одноименных датчиков отличаются больше чем на наперед заданную величину, определяемую экспериментально для каждого типа датчиков и двигателя, формируют сигнал «Отказ измерения параметра», отключают электронный регулятор и переводят управление ГТД на резервный гидромеханический регулятор.
Недостатком этого способа является следующее.
Отказы ЭР имеют разное влияние на возможность управления двигателем. Например, отказ электрогидропреобразователя управляющего воздействия ЭР, входящего в блок ИЭ, действительно делает невозможным управление двигателем от ЭР. Перевод управления на ГМР в этой ситуации неизбежен, однако отказ датчика температуры (Твх) воздуха на входе в двигатель делает невозможным расчет заданной частоты (n) вращения двигателя по программе

где α руд - положение рычага управления двигателем,
Рвх - давление воздуха на входе в двигатель.
При этом сохраняется возможность управления двигателем от ЭР, т.к. входные и выходные преобразователи и вычислитель ЭР исправны, блок ИЭ ЭР исправен. Но управление двигателем переводится на ГМР (такая логика реализована в электронном регуляторе РЭД-90, входящем в состав САУ двигателя ПС-90А), что снижает качество управления, т.к.
- номенклатура датчиков ЭР и ГМР не совпадает;
- точностные характеристики датчиков ЭР лучше, чем у ГМР;
- законов управления, реализованных в ГМР, меньше по количеству, и точность их поддержания ниже.
Дополнительно при переводе управления двигателем на ГМР теряются очень важные функции, такие, например, как защита турбины от перегрева и защита двигателя от помпажа и расцепки валов компрессора и турбины.
Это в свою очередь приводит к снижению надежности работы ГТД и, как следствие, снижению безопасности полета летательного аппарата (ЛА).
Целью изобретения является повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
Поставленная цель достигается тем, что в способе управления ГТД, заключающемся в том, что контролируют показания одноименных датчиков на допустимый диапазон, в случае если показания одноименных датчиков находятся внутри допустимого диапазона, сравнивают показания одноименных датчиков между собой, если показания одноименных датчиков отличаются больше чем на наперед заданную величину, определяемую экспериментально для каждого типа датчиков и двигателя, формируют сигнал «Отказ измерения параметра», отключают электронный регулятор и переводят управление ГТД на резервный гидромеханический регулятор, дополнительно формируют контрольное значение параметра по отказавшему каналу измерения: для параметров, характеризующих работу ГТД формируют расчетное значение параметра по известным зависимостям с использованием показаний исправных каналов измерения, для параметров воздушного потока на входе в двигатель используют замеры, поступившие из самолетной системы измерения, сравнивают контрольное и измеренное значения параметра, для того датчика, у которого разница между контрольным и измеренным значениями больше, формируют сигнал «Отказ первого датчика», снимают сигнал «Отказ измерения параметра», переводят управление двигателем на электронный регулятор и продолжают управление двигателем с использованием показаний второго датчика.
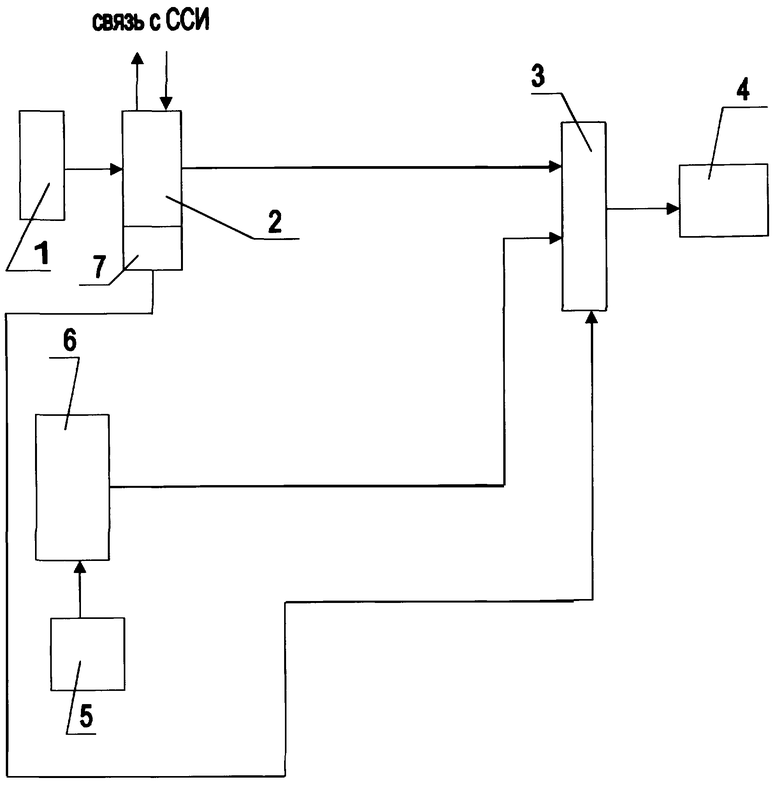
На чертеже представлена схема устройства, реализующая заявляемый способ.
Устройство содержит последовательно соединенные первый блок 1 дублированных датчиков (БД), двухканальный электронный регулятор 2 (ЭР), селектор 3 «электроника - гидромеханика», блок 4 двухканальных исполнительных элементов (ИЭ), последовательно соединенные второй блок 5 датчиков, гидромеханический регулятор 6 (ГМР), выход которого подключен к селектору 3, блок 7 встроенного контроля (БВК), выход которого подключен к управляемому входу селектора 3, блок 7 имеет двухстороннюю связь с ЭР 2 и конструктивно в него интегрирован.
Устройство работает следующим образом.
Работоспособность ЭР 2 оценивается БВК 12 по информации, поступающей из ЭР 2, по известным принципам (см., например, [4]).
При исправном ЭР 2 селектор 3 находится в положении «электроника» и пропускает в блок 4 ИЭ управляющие команды ЭР 2.
Электронный регулятор 2 по сигналам датчиков из блока 1 по известным зависимостям (см., например, [3]), формирует управляющее воздействие на ИЭ 4, которые осуществляют требуемые изменения расхода топлива в камеру сгорания двигателя, положения лопаток входного направляющего аппарата (ВНА) компрессора и клапанов (КПВ) перепуска воздуха.
Показания датчиков из блока 1 контролируются БВК 7 на диапазон и соответствие.
Например, датчик типа П-109М, содержащий две сигнальные обмотки для замера Твх контролируется следующим образом (далее приводится логика работы, реализованная в электронном регуляторе РЭД-90А2, входящем в состав электронной САУ нового поколения, разработанной для перспективного двигателя ПС-90А2). Сигналы с каждой обмотки датчика проверяются на физический диапазон, а именно, измеренная температура воздуха не может быть ниже 203 К и не может быть выше 313 К.
Если сигналы с каждой обмотки датчика находятся внутри этого диапазона, проводится сравнение сигналов между собой.
При нормальной работе двигателя разность между сигналами с каждой обмотки не может превышать 1 К (эта величина определяется точностью измерения и точностью преобразования сигнала с датчика). На нерасчетных режимах работы двигателя (например, при возникновении срывных явлений на лопатках компрессора или помпаже) допуск на сравнение увеличивается до 50 К.
Если разность между сигналами с каждой обмотки не превышает контрольной величины, считается, что резервированный канал измерения работоспособен и измеренный параметр может использоваться для управления двигателем.
Если разность между сигналами с каждой обмотки превышает контрольную величину, считается, что канал измерения неисправен: формируется сигнал «Отказ измерения Твх»,
При этом отказе становится невозможным управление двигателем по основным программам регулирования:



где α вна - положение лопаток ВНА.

где Пкпв - положение КПВ.
По команде БВК 7 селектор 3 переводится из положения «электроника» в положение «гидромеханика», в котором он отключает от управления двигателем ЭР 2 и пропускает в блок 4 ИЭ управляющие команды ГМР 6, формируемые им по сигналам датчиков из блока 5 по известным зависимостям.
При этом теряется возможность выполнения функций защиты двигателя от помпажа, расцепки валов компрессора и турбины и защиты турбины от перегрева.

где Тг - температура газов перед турбиной,
т.е. ухудшается качество управления двигателем.
Поэтому после перевода управления на ГМР 6 в БВК 7 производится идентификация отказа канала измерения Твх с целью выявления отказавшей обмотки датчика и использования для управления сигнала с исправной. Это делается следующим образом.
Для уже упомянутого канала измерения температуры воздуха на входе в двигатель (параметр воздушного потока) сигналы с каждой обмотки датчика Твх сравниваются с контрольным значением Твх контр., полученным по цифровому каналу связи из самолетной системы измерения (ССИ). Для того датчика, у которого разница между контрольным и измеренным значениями больше, формируют сигнал «Отказ первого датчика Твх», снимают сигнал «Отказ измерения Твх». По команде БВК 7 с помощью селектора 3 переводят управление двигателем на ЭР 2 и продолжают управление двигателем с использованием показаний второго датчика.
Таким образом, обеспечивается повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
Источники информации
1. Кеба И.В. «Летная эксплуатация вертолетных ГТД». М.: «Транспорт», 1976 г.
2. «Руководство по эксплуатации двигателя ТВ7-117С». ЛНПО им. В.Я.Климова, Ленинград, 1988 г.
3. Шляхтенко С.М. «Теория двухконтурных ТРД». М.: «Машиностроение», 1979 г.
4. Бодлер В.А., Рязанов Ю.А, Шаймарданов Ф.А. «Системы автоматического управления двигателями летательных аппаратов». М.: «Машиностроение», 1973 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2416036C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2345234C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2472957C2 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРОННО-ГИДРОМЕХАНИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2432476C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2348824C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2417326C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2308605C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2007 |
|
RU2365774C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2425237C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2432475C2 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления ГТД.
Сущность изобретения заключается в том, что дополнительно формируют контрольное значение параметра по отказавшему каналу измерения: для параметров, характеризующих работу ГТД, формируют расчетное значение параметра по известным зависимостям с использованием показаний исправных каналов измерения, для параметров воздушного потока на входе в двигатель используют замеры, поступившие из самолетной системы измерения, сравнивают контрольное и измеренное значения параметра, для того датчика, у которого разница между контрольным и измеренным значениями больше, формируют сигнал «Отказ первого датчика», снимают сигнал «Отказ измерения параметра», переводят управление двигателем на электронный регулятор и продолжают управление двигателем с использованием показаний второго датчика.
Технический результат изобретения - повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА. 1 ил.
Способ управления газотурбинным двигателем, заключающийся в том, что контролируют показания одноименных датчиков на допустимый диапазон, в случае, если показания одноименных датчиков находятся внутри допустимого диапазона, сравнивают показания одноименных датчиков между собой, если показания одноименных датчиков отличаются больше, чем на наперед заданную величину, определяемую экспериментально для каждого типа датчиков и двигателя, формируют сигнал «Отказ измерения параметра», отключают электронный регулятор и переводят управление ГТД на резервный гидромеханический регулятор, отличающийся тем, что дополнительно формируют контрольное значение параметра по отказавшему каналу измерения: для параметров, характеризующих работу ГТД, формируют расчетное значение параметра по известным зависимостям с использованием показаний исправных каналов измерения, для параметров воздушного потока на входе в двигатель используют замеры, поступившие из самолетной системы измерения, сравнивают контрольное и измеренное значения параметра, для того датчика, у которого разница между контрольным и измеренным значениями больше, формируют сигнал «Отказ первого датчика», снимают сигнал «Отказ измерения параметра», переводят управление двигателем на электронный регулятор и продолжают управление двигателем с использованием показаний второго датчика.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1989 |
|
SU1642812A1 |
| SU 1625095 A1, 15.06.1994 | |||
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2308605C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2006 |
|
RU2319025C1 |
| US 6568166 B2, 27.06.2002 | |||
| ТКАНЬ С ПЕРЕПЛЕТЕНИЕМ ШИЛОВА | 2002 |
|
RU2228977C1 |

