Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления газотурбинными двигателями (ГТД).
Известен способ управления ГТД, реализованный в электронно-гидромеханической САУ супервизорного типа [Кеба И.В. Летная эксплуатация вертолетных ГТД, Москва, Транспорт, 1976]. Способ заключается в том, что с целью повышения точности управления управляющее воздействие гидромеханического регулятора корректируется в ограниченном диапазоне электронным корректором.
Недостатком известного способа является его низкая эффективность.
Наиболее близким к данному изобретению по технической сущности является способ управления ГТД, реализованный, например, в электронно-гидромеханической САУ двигателя ТВ7-117, входящего в силовую установку (СУ) самолета Ил-114 [Руководство по эксплуатации двигателя ТВ7-117С, ЛНПО им. В.Я.Климова, Ленинград, 1988].
САУ содержит двухканальный электронный цифровой регулятор (ЭЦР), резервный гидромеханический регулятор (ГМР), селектор и блок исполнительных механизмов (ИМ).
Способ заключается в том, что контролируют показания одноименных датчиков на допустимый диапазон в случае если показания одноименных датчиков находятся внутри допустимого диапазона, сравнивают показания одноименных датчиков между собой, если показания одноименных датчиков отличаются больше, чем на наперед заданную величину, определяемую экспериментально для каждого типа датчиков и двигателя, формируют сигнал «Отказ измерения параметра», отключают ЭЦР и переводят управление ГТД на ГМР.
Недостатком этого способа является следующее.
Ядром ЭЦР является цифровой вычислитель, работающий циклами. Длительность одного цикла выбирается в зависимости от сложности выполняемой рабочей программы (РП). Для ЭЦР, входящих в состав САУ современных ГТД, например, РЭД-90А2 для двигателя ПС-90А2 или БКИ-117 для изделия «117» длительность рабочего цикла составляет 0,02 с. Это значит, что каждые 0,02 с в ЭЦР формируются и подаются на ИЭ управляющие воздействия, определяющие расход топлива в камеру сгорания (КС) двигателя, положение лопаток направляющего аппарата (НА) и клапанов перепуска воздуха (КПВ) компрессора двигателя. Таким образом осуществляется управление двигателем.
Однако в эксплуатации встречаются отказы ЭЦР, приводящие к «зависанию» РП (отказы тактозадающей части вычислителя ЭЦР, например кварцевого генератора эталонной частоты). При таком отказе выполнение РП прекращается, а на ИМ постоянно подаются управляющие воздействия, вычисленные в цикле ЭЦР, предшествовавшем моменту отказа. Это может привести к неуправляемому изменению режима работы двигателя вплоть до выхода на предельный режим по параметрам газогенератора или погасанию КС и выключению двигателя.
Это снижает надежность работы ГТД и, как следствие, приводит к снижению безопасности полета летательного аппарата (ЛА).
Целью изобретения является повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
Поставленная цель достигается тем, что в способе управления ГТД, заключающемся в том, что контролируют показания одноименных датчиков на допустимый диапазон, в случае если показания одноименных датчиков находятся внутри допустимого диапазона, сравнивают показания одноименных датчиков между собой, если показания одноименных датчиков отличаются больше, чем на наперед заданную величину, определяемую экспериментально для каждого типа датчиков и двигателя, формируют сигнал «Отказ измерения параметра», отключают ЭЦР и переводят управление ГТД на ГМР, дополнительно при работе на ЭЦР контролируют работу ЭЦР: задают предельное время длительности цикла ЭЦР, заведомо большее длительности выполнения ЭЦР РП, с помощью вычислителя ЭЦР выполняют РП, в процессе выполнения РП по показаниям датчиков по известным зависимостям вычисляют управляющие воздействия на расход топлива в КС двигателя и элементы его механизации (ВНА, КПВ) и подают их на ИМ, запускают тестовую программу (ТП), время выполнения которой вычислителем ЭЦР заведомо большее длительности цикла ЭЦР, если в процессе выполнения ТП из аппаратной части системы встроенного контроля (АСВК) приходит команда на начало выполнения нового цикла ЭЦР, снова запускают РП и продолжают вычисление управляющих воздействий, если выполнение ТП закончено, а команды из АСВК на начало выполнения нового цикла ЭЦР не поступило, отключают ЭЦР и переводят управление ГТД на ГМР.
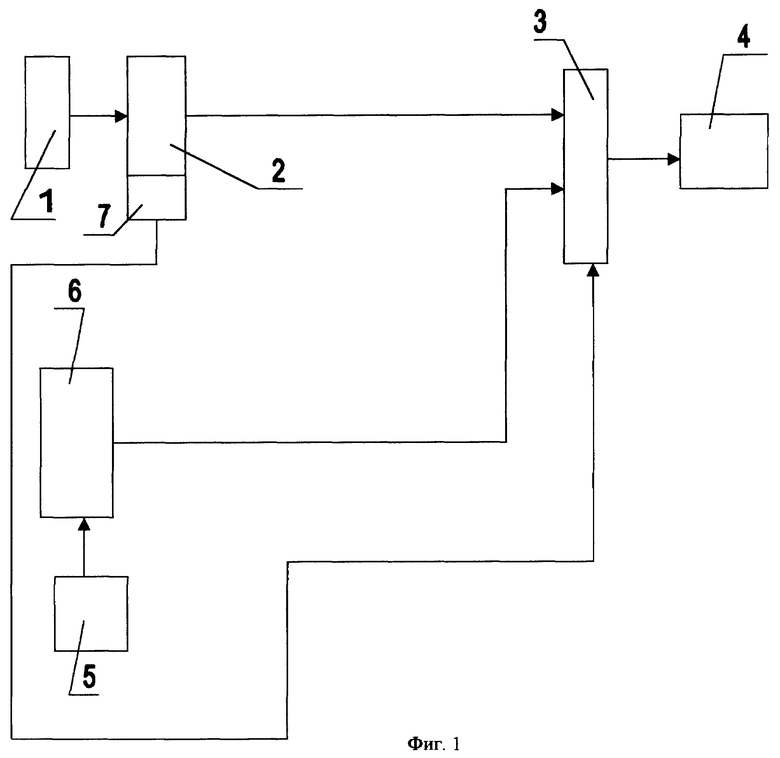
На фигуре 1 представлена схема устройства, реализующая заявляемый способ, на фигуре 2 - схема ЭЦР.
Устройство содержит последовательно соединенные первый блок 1 дублированных датчиков (БД), ЭЦР 2, селектор 3 «электроника - гидромеханика», блок 4 ИМ, последовательно соединенные второй БД 5, ГМР 6, выход которого подключен к селектору 3, блок 7 встроенного контроля (БВК), включающий в себя аппаратную часть (АСВК - на чертеже не показана), выход БВК 7 подключен к управляемому входу селектора 3, БВК 7 имеет двухстороннюю связь с ЭЦР 2 и конструктивно в него интегрирован.
ЭЦР 2 содержит последовательно соединенные устройство 8 ввода, вычислитель 9, устройство 10 вывода, вход устройства 8 подключен к выходу БД 1, выход устройства 10 подключен ко входу селектора 3, АСВК 11, выход которой подключен к управляемому входу устройства 10, вычислитель 9 содержит процессор 12, имеющий двухстороннюю связь с первым 13 и вторым 14 постоянными запоминающими устройствами (ПЗУ) и оперативным запоминающим устройством 9 (ОЗУ), вход которого подключен к устройству 8, а выход - к устройству 10, АСВК 11 имеет двухстороннюю связь с процессором 12.
Устройство работает следующим образом.
Работоспособность ЭЦР 2 оценивается БВК 12 по информации, поступающей из ЭЦР 2, по известным принципам (см., например, Васильев В.И. Автоматический контроль и диагностика систем управления силовыми установками летательных аппаратов, Москва, Машиностроение, 1989).
При исправном ЭЦР 2 селектор 3 находится в положении «электроника» и пропускает в блок 4 ИМ управляющие команды ЭР 2.
ЭЦР 2 по сигналам датчиков из БД 1 по известным зависимостям (см., например, Шляхтенко С.М. Теория даухконтурных ТРД, Москва, Машиностроение, 1979) формирует управляющее воздействие на блок 4 ИЭ, которые осуществляют требуемые изменения расхода топлива в камеру сгорания двигателя, положения лопаток входного направляющего аппарата (ВНА) компрессора и клапанов (КПВ) перепуска воздуха.
Показания датчиков из БД 1 контролируются БВК 7 на диапазон и соответствие.
Например, датчик типа П-109М, содержащий две сигнальные обмотки для замера Твх., контролируется следующим образом (далее приводится логика работы, реализованная в электронном регуляторе РЭД-90А2, входящем в состав электронной САУ нового поколения, разработанной для перспективного двигателя ПС-90А2). Сигналы с каждой обмотки датчика проверяются на физический диапазон, а именно измеренная температура воздуха не может быть ниже 203 К и не может быть выше 313 К.
Если сигналы с каждой обмотки датчика находятся внутри этого диапазона, проводится сравнение сигналов между собой.
При нормальной работе двигателя разность между сигналами с каждой обмотки не может превышать 1 К (эта величина определяется точностью измерения и точностью преобразования сигнала с датчика). На нерасчетных режимах работы двигателя (например, при возникновении срывных явлений на лопатках компрессора или помпаже) допуск на сравнение увеличивается до 50 К.
Если разность между сигналами с каждой обмотки не превышает контрольной величины, считается, что резервированный канал измерения работоспособен и измеренный параметр может использоваться для управления двигателем.
Если разность между сигналами с каждой обмотки превышает контрольную величину, считается, что канал измерения неисправен: формируется сигнал «Отказ измерения Твх.»,
При этом отказе становится невозможным управление двигателем по основным программам регулирования:



где αвна - положение лопаток ВНА.

где Пкпв - положение КПВ.
По команде БВК 7 селектор 3 переводится из положения «электроника» в положение «гидромеханика», в котором он отключает от управления двигателем ЭЦР 2 и пропускает в блок 4 ИМ управляющие команды ГМР 6, формируемые им по сигналам датчиков из блока 5 по известным зависимостям.
Дополнительно при работе на ЭЦР контролируют работу ЭЦР 2 (см. фигуру 2). ЭЦР 2 представляет собой управляющий комплекс. Вычислитель 9 ЭЦР 2 представляет собой процессор 12, выполняющий РП, хранящиеся в ПЗУ 13, и ТП, хранящиеся в ПЗУ 14. Входная информация о состоянии ГТД из БД 1 поступает в устройство 8 и после обработки передается в ОЗУ 15. Процессор 12 для выполнения РП использует информацию из ОЗУ 15.
В процессе выполнения РП по показаниям датчиков (полученным из ОЗУ 15) по известным зависимостям процессор 12 вычисляет управляющие воздействия на расход топлива в КС двигателя и элементы его механизации (ВНА, КПВ)
Вычисленные процессором 12 управляющие воздействия передаются в ОЗУ 15 и оттуда поступают в устройство 10. Через него они передаются на вход селектора 3.
Вычисление управляющих воздействий процессор 12 осуществляет каждый цикл (например, каждые 0,02 с). Сигнал на начало цикла формируется в АСВК и передается в процессор 12.
После поступления этого сигнала процессор 12 выполняет РП, а после ее завершения начинает выполнение ТП.
При нормальной работе ЭЦР 2 сигнал на начало нового цикла поступает в процессор 12 каждые 0,02 с, и процессор 12 каждые 0,02 с вычисляет и передает через ОЗУ 15 на устройство 10 вывода «свежие» управляющие воздействия. В случае возникновения неисправности, приводящей к «зависанию» процессора 12, процессор 12 выполняет РП, потом ТП, после этого формирует сигнал в АСВК о том, что обе программы выполнены, а сигнала на начало нового цикла нет. Получив этот сигнал, АСВК с помощью устройства 10 и селектора 3 отключают ЭЦР 2 и переводят управление ГТД на ГМР 6.
Таким образом, обеспечивается повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2387855C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2472957C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2345234C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2447418C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2006 |
|
RU2334888C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2348824C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2432475C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2417326C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2007 |
|
RU2365774C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХОБМОТОЧНЫМ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ АВИАЦИОННОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2011 |
|
RU2496999C2 |

Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления ГТД. Сущность изобретения заключается в том, что дополнительно при работе на ЭЦР контролируют работу ЭЦР: задают предельное время длительности цикла ЭЦР, заведомо большее длительности выполнения ЭЦР рабочей программы (РП), с помощью вычислителя ЭЦР выполняют РП, в процессе выполнения РП по показаниям датчиков по известным зависимостям вычисляют управляющие воздействия на расход топлива в камеру сгорания (КС) двигателя и элементы его механизации (ВНА, КПВ) и подают их на исполнительные механизмы (ИМ), запускают тестовую программу (ТП), время выполнения которой вычислителем ЭЦР, заведомо большее длительности цикла ЭЦР, если в процессе выполнения ТП из аппаратной части системы встроенного контроля (АСВК) приходит команда на начало выполнения нового цикла ЭЦР, снова запускают РП и продолжают вычисление управляющих воздействий, если выполнение ТП закончено, а команды из АСВК на начало выполнения нового цикла ЭЦР не поступило, отключают ЭЦР и переводят управление ГТД на ГМР. Технический результат изобретения - повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА. 2 ил.
Способ управления газотурбинным двигателем, заключающийся в том, что контролируют показания одноименных датчиков на допустимый диапазон, в случае, если показания одноименных датчиков находятся внутри допустимого диапазона, сравнивают показания одноименных датчиков между собой, если показания одноименных датчиков отличаются больше, чем на наперед заданную величину, определяемую экспериментально для каждого типа датчиков и двигателя, формируют сигнал «Отказ измерения параметра», отключают электронный цифровой регулятор (ЭЦР) и переводят управление ГТД на резервный гидромеханический регулятор (ГМР), отличающийся тем, что дополнительно при работе на ЭЦР контролируют работу ЭЦР: задают предельное время длительности цикла ЭЦР, заведомо большее длительности выполнения ЭЦР рабочей программы (РП), с помощью вычислителя ЭЦР выполняют РП, в процессе выполнения РП по показаниям датчиков вычисляют управляющие воздействия на расход топлива в камеру сгорания (КС) двигателя и элементы его механизации (ВНА, КПВ) и подают их на исполнительные механизмы (ИМ), запускают тестовую программу (ТП), время выполнения которой вычислителем ЭЦР заведомо большее длительности цикла ЭЦР, если в процессе выполнения ТП из аппаратной части системы встроенного контроля (АСВК) приходит команда на начало выполнения нового цикла ЭЦР, снова запускают РП и продолжают вычисление управляющих воздействий, если выполнение ТП закончено, а команды из АСВК на начало выполнения нового цикла ЭЦР не поступило, отключают ЭЦР и переводят управление ГТД на ГМР.
| RU 1090083 A1, 27.01.1996 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1989 |
|
SU1642812A1 |
| SU 1625095 A1, 15.06.1994 | |||
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2308605C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2004 |
|
RU2285816C2 |
| ПО Г-СО ЮЗ НА Я | 0 |
|
SU306064A1 |
| ТКАНЬ С ПЕРЕПЛЕТЕНИЕМ ШИЛОВА | 2002 |
|
RU2228977C1 |

