Изобретение относится к области управления свойствами различных процессов, в частности управлению оптимальными обнаружителями сигналов, к способам определения и установки величины порога обнаружения.
Из уровня техники известен способ определения порога обнаружения, при котором значение порога выбирается на основании требований применяемого критерия обнаружения в зависимости от отношения сигнал/шум и заданных характеристик обнаружения (Ю.М.Казаринов и др. Радиотехнические системы / Под ред. Ю.М.Казаринова. - М: Сов. радио. - 1968. - 496 с.).
Существенным недостатком такого способа является то, что значение порога назначается исходя из требований к работе обнаружителя в конкретных условиях и остается неизменным на протяжении всего цикла обнаружения, что при сравнительно малых отношениях сигнал/шум, а также вследствие случайности принимаемых реализаций приводит к ошибкам обнаружения.
Известен способ управления порогом в оптимальном обнаружителе, в котором измеряют интенсивность шумов, значение которой затем используют для изменения порога обнаружения (Патент SU 1290541 A1, H04B 1/10, 15.02.1987). Согласно способу изменение величины порога происходит детерминированно в зависимости от интенсивности шумов и с учетом максимально допустимого коэффициента глубины модуляции.
Недостатком данного способа является то, что существует определенная функциональная зависимость величины порога от отношения сигнал/шум и коэффициента глубины модуляции, что в случае преднамеренного (например, постановка помех) или случайного изменения уровня шума на входе обнаружителя произойдет ошибка в определении величины порога. Кроме того, для установления величины порога используется только лишь два параметра входного сигнала: отношение сигнал/шум и коэффициент глубины модуляции.
Наиболее близким по технической сущности является взятый в качестве прототипа способ, в котором на интервале наблюдения регистрируют изменение сигналов на выходе безынерционных индикаторов неинформативных параметров входного сигнала, которые стохастически связаны с изменением его информативных параметров, и устанавливают новую величину порога обнаружения в момент регистрации указанных изменений (Патент RU 2292114 С2, Н04В 1/10, 20.01.2007).
Недостатком данного способа является возможное уменьшение достоверности обнаружения изменения информативных параметров входного сигнала после установления новой величины порога в момент регистрации изменений сигналов на выходе безынерционных индикаторов неинформативных параметров. Возможна такая ситуация, когда изменение сигнала на выходе безынерционного индикатора неинформативного параметра связано не с изменением информативного параметра входного сигнала, а с другими обстоятельствами, например действием помехи, при этом установление новой величины порога приведет к уменьшению достоверности обнаружения изменения информативного параметра.
Техническим результатом изобретения является повышение достоверности обнаружения изменения информативных параметров сигналов в условиях помех.
Сущность изобретения состоит в том, что в известном способе, согласно которому на интервале наблюдения регистрируют изменение сигналов на выходе безынерционных индикаторов неинформативных параметров входного сигнала, которые стохастически связаны с изменением его информативных параметров, устанавливают новую величину порога обнаружения в момент регистрации указанных изменений, регистрируется изменение сигналов на выходе безынерционных индикаторов неинформативных параметров последовательно и в определенном порядке, а новую величину порога обнаружения устанавливают в момент регистрации последнего изменения.
Изобретение осуществляется следующим образом.
Согласно оптимальному байесовскому последовательному правилу обнаружения значение порога в момент n прекращения наблюдений определяется как

(Тартаковский А.Г. Оптимальное обнаружение изменений свойств случайных последовательностей // А и Т. 1987. - №8. - С. 106-113),
где c00(n) - потери при правильном необнаружении на n-ом шаге; c11(n) - потери при правильном обнаружении на n-ом шаге; c01(n) - потери, вызванные ложной тревогой на n-ом шаге; c10(n) - потери, вызванные пропуском входного сигнала на n-ом шаге; An=1-p(nΔ),p(nΔ) - априорное распределение момента обнаружения; Δ - интервал времени между шагами.
При этом с порогом hn сравнивается апостериорная вероятность изменения информативного параметра сигнала, а критерием оптимальности обнаружителя является минимум потерь при принятии решения.
Следует также отметить, что при постепенном изменении информативного параметра на входе обнаружителя справедливы следующие соотношения:

где  - потери, вызванные ложной тревогой,
- потери, вызванные ложной тревогой,  - потери, вызванные пропуском сигнала,
- потери, вызванные пропуском сигнала,  - потери, связанные с правильным необнаружением,
- потери, связанные с правильным необнаружением,  - потери, связанные с правильным обнаружением по окончании серии из N наблюдений; С(n-k) - стоимость задержки в принятии решения на (n-k) шагов; j=0;1.
- потери, связанные с правильным обнаружением по окончании серии из N наблюдений; С(n-k) - стоимость задержки в принятии решения на (n-k) шагов; j=0;1.
Технический результат изобретения достигается в результате использования информации с выхода двух и более безынерционных индикаторов неинформативных параметров сигнала, а именно для установления новой величины порога используются: наличие самих изменений, моменты времени изменений и порядок изменений сигналов на выходе двух и более безынерционных индикаторов неинформативных параметров сигнала. Причем наличие изменений, моменты изменений и порядок изменений стохастически связаны с возможным изменением информативных параметров сигнала на входе обнаружителя.
Безынерционные индикаторы неинформативных параметров сигнала строятся на основе следующих известных технических устройств:
- радиотехнических измерителей мощности, амплитуды, частоты, фазы, длительности импульса и т.д.;
- радиотехнических измерителей корреляционных, спектральных, пространственно-временных характеристик сигнала;
- радиотехнических фильтров, счетчиков импульсов, логических устройств и т.д.
Особенностью их функционирования является то, что выходной сигнал каждого индикатора принимает два значения - ноль или единица ("0" или "1") в соответствии с неизменением или изменением регистрируемого неинформативного параметра на входе индикатора неинформативного параметра сигнала. Причем безынерционными считаются такие индикаторы, сигналы на выходе которых формируются ранее, чем успевает измениться выходной сигнал обнаружителя. Регистрируемые с помощью индикаторов неинформативные параметры фиксируют какие-либо особенности реализации наблюдаемого сигнала, которые стохастически связаны с возможным изменением информативного параметра сигнала на входе обнаружителя. Например, можно регистрировать изменение уровня шума, спектра, фазы, длительности сигнала, поляризации и т.д. и использовать факт их изменения в определенном порядке для установления различия между истинным и помеховым сигналом. Привлечение для обнаружения изменения одного информативного параметра нескольких индикаторов неинформативных параметров, а также регистрация изменения сигналов на их выходе в определенном порядке ведет к повышению достоверности обнаружения изменения информативного параметра сигнала в условиях помех.
Независимо от типа индикатора его функционирование можно описать условной вероятностью перехода из rk в rk+1 состояние

где  - порядковый номер индикатора; Р(Pr=1), Р(Pr=0) - соответственно вероятности наличия и отсутствия изменения регистрируемого неинформативного параметра на входе индикатора;
- порядковый номер индикатора; Р(Pr=1), Р(Pr=0) - соответственно вероятности наличия и отсутствия изменения регистрируемого неинформативного параметра на входе индикатора;  - вероятности сохранения или изменения выходного сигнала индикатора при наличии или отсутствии изменения регистрируемого неинформативного параметра на входе индикатора соответственно;
- вероятности сохранения или изменения выходного сигнала индикатора при наличии или отсутствии изменения регистрируемого неинформативного параметра на входе индикатора соответственно;  - дискретный момент времени.
- дискретный момент времени.
Если все М индикаторов неинформативных параметров безынерционные, то можно считать, что в момент k регистрации изменения сигнала на выходе последнего (М-го) индикатора изменение информативного параметра сигнала на входе оптимального обнаружителя происходит с вероятностью Р=1, при этом новое значение порога определяется как

где AN=1 - p(NΔ); p(NΔ) - априорное распределение момента обнаружения на N-ом шаге. Сравнивая значения порогов (1) и (3) с учетом соотношения (2) и равномерности априорного распределения момента обнаружения, можно сделать вывод о том, что использование информации с выхода безынерционных индикаторов неинформативных параметров сигнала позволяет сократить время обнаружения изменения информативных параметров сигнала в условиях помех вследствие снижения уровня порога.
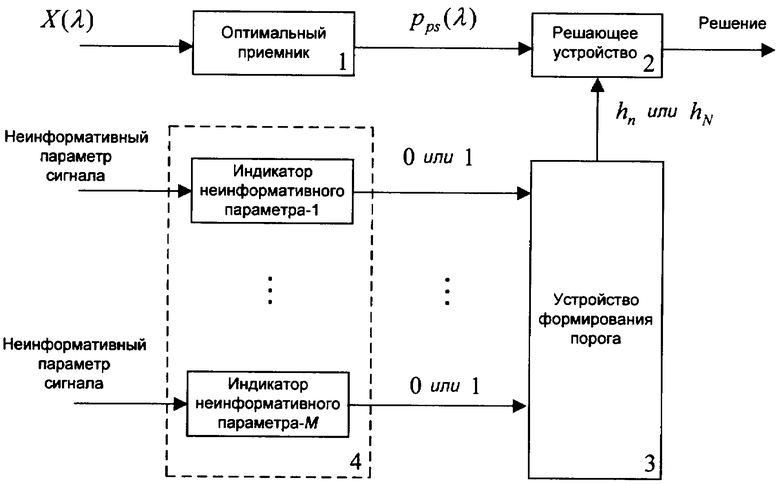
На чертеже изображена схема, поясняющая принцип работы заявленного способа управления порогом в оптимальном обнаружителе. В ней представлены: оптимальный приемник 1 и решающее устройство 2, в совокупности образующие оптимальный обнаружитель; устройство формирования порога 3; блок безынерционных индикаторов неинформативных параметров сигнала 4.
Согласно схеме оптимальный приемник на основе обработки входного сигнала с дискретной выборкой Х=Х(λ) в момент времени tN, равный интервалу наблюдения Т=NΔ, где Δ - интервал времени между шагами, N - число наблюдений в серии, формирует апостериорную плотность вероятности pps, описываемую формулой Байеса
 pps(λ)=kppr(λ)(LK(λ),
pps(λ)=kppr(λ)(LK(λ),
где ppr(λ) - априорная плотность вероятности информативного параметра λ; L(λ) - функция правдоподобия.
Апостериорная плотность вероятности pps(λ) в решающем устройстве сравнивается с порогом hn, который определяется в устройстве формирования порога в соответствии с формулой (1). В случае, если в устройстве формирования порога последовательно и в определенном порядке зарегистрировано изменение сигналов на выходе индикаторов неинформативных параметров сигнала, то в момент времени tn<T регистрации последнего изменения апостериорная плотность вероятности pps(λ) сравнивается с новым порогом hN, определяемым по формуле (3). После принятия решения текущая серия наблюдений прекращается и происходит переход к следующей серии наблюдений ранее окончания интервала наблюдения текущей серии.
Принцип работы заявленного способа поясняется следующим примером.
Пример. Пусть в радиолокационном дальномере имеется обнаружитель маневра летательного аппарата (цели), в котором с порогом сравнивается апостериорная плотность вероятности изменения времени задержки отраженного от цели сигнала. При этом время задержки отраженного от цели сигнала является информативным параметром.
При интенсивном маневрировании цели из-за изменения ракурса летательного аппарата возможно изменение количества "блестящих точек" и, как следствие, скачкообразное увеличение мощности отраженного сигнала. Если наблюдаемая цель совершает маневр, то возможно и резкое изменение фазы отраженного сигнала. Резкие изменения мощности и фазы принимаемого сигнала стохастически связаны с изменением (сравнительно плавным) времени задержки отраженного от цели сигнала при совершении маневра. Причем изменение фазы принимаемого сигнала при условии, что перед этим произошло увеличение мощности принимаемого сигнала, также стохастически связано с изменением времени задержки при совершении маневра. В качестве безынерционных индикаторов неинформативных параметров сигнала используются измеритель мощности сигнала и измеритель фазы сигнала. Рассматриваются два случая:
1. Новую величину порога обнаружения устанавливают в момент регистрации изменений сигналов на выходе измерителя мощности или измерителя фазы (т.е. регистрируется изменение сигналов на выходе индикаторов неинформативных параметров входного сигнала, а новую величину порога обнаружения устанавливают в момент регистрации изменений).
2. Новую величину порога обнаружения устанавливают в момент регистрации изменения сигнала на выходе измерителя фазы при условии, что перед этим моментом зарегистрировано изменение сигнала на выходе измерителя мощности (т.е. регистрируется изменение сигналов на выходе индикаторов неинформативных параметров входного сигнала последовательно и в определенном порядке, а новую величину порога обнаружения устанавливают в момент регистрации последнего изменения).
Если наблюдаемая цель совершает маневр, то в первом случае установление новой величины порога (отличной от оптимальной) приведет к сокращению задержки в обнаружении изменения информативного параметра сигнала. Во втором случае установление новой величины порога (отличной от оптимальной) также приведет к сокращению задержки в обнаружении изменения информативного параметра при маневрировании цели.
Однако резкое увеличение мощности сигнала происходит и вначале постановки уводящей по дальности (имитирующей) помехи, а изменение фазы сигнала может произойти во время ее действия. Если равномерно и прямолинейно летящая цель ставит уводящую по дальности помеху, то в первом случае установление новой величины порога приведет к уменьшению достоверности обнаружения изменения времени задержки отраженного от цели сигнала (информативного параметра). Во втором случае изменение величины порога не произойдет, и величина порога останется на оптимальном уровне. Это связано с тем, что постановщик уводящей помехи в начале цикла увода стремится к точности воспроизведения фазовых характеристик радиолокационного сигнала и, несмотря на увеличение мощности сигнала, резкого изменения фазы сигнала не произойдет.
Таким образом, применение заявленного способа управления порогом повышает достоверность обнаружения изменения информативных параметров сигналов в условиях помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОРОГОМ В ОПТИМАЛЬНОМ ОБНАРУЖИТЕЛЕ | 2004 |
|
RU2292114C2 |
| Способ формирования порога решающего устройства на основе нейрорегулятора | 2020 |
|
RU2731332C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ И АДАПТИВНОГО УПРАВЛЕНИЯ РАСПРЕДЕЛЕННОЙ СИСТЕМОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312389C1 |
| Способ комплексирования информации радиолокационной станции и радиолокационных головок самонаведения ракет, пущенных носителем по воздушной цели при воздействии уводящих по дальности и скорости помех | 2021 |
|
RU2765145C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2020 |
|
RU2764781C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ С ПОМОЩЬЮ КОМБИНИРОВАННОГО ПРИЕМНИКА | 2017 |
|
RU2654335C1 |
| Способ сопровождения в радиолокационной станции воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2019 |
|
RU2713635C1 |
| РАНГОВЫЙ АДАПТИВНЫЙ ПОСЛЕДОВАТЕЛЬНЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 1996 |
|
RU2100822C1 |
| Способ контроля излучения источника в заданном направлении | 2019 |
|
RU2713514C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ АЛГОРИТМА СИГМА-ТОЧЕЧНОГО ФИЛЬТРА КАЛМАНА | 2024 |
|
RU2840100C1 |
Изобретение относится к области управления свойствами различных процессов, в частности к управлению оптимальными обнаружителями сигналов, к способам определения и установки величины порога обнаружения. Сущность изобретения состоит в том, что в известном способе, согласно которому на интервале наблюдения регистрируют изменение сигналов на выходе безынерционных индикаторов неинформативных параметров входного сигнала, которые стохастически связаны с изменением его информативных параметров, устанавливают новую величину порога обнаружения в момент регистрации указанных изменений, регистрируют изменение сигналов на выходе безынерционных индикаторов неинформативных параметров последовательно и в определенном порядке, а новую величину порога обнаружения устанавливают в момент регистрации последнего изменения. Достигаемым техническим результатом изобретения является повышение достоверности обнаружения изменения информативных параметров сигналов в условиях помех. 1 ил.
Способ управления порогом обнаружения в оптимальном обнаружителе, согласно которому на интервале наблюдения регистрируют изменение сигналов на выходе М безынерционных индикаторов неинформативных параметров входного сигнала, которые стохастически связаны с изменением его информативных параметров, отличающийся тем, что новую величину порога обнаружения устанавливают при последовательной регистрации в момент последнего изменения одного из неинформативных параметров на выходе одного из М безынерционных индикаторов, при условии, что перед этим моментом на выходе другого безынерционного индикатора зарегистрировано изменение другого неинформативного параметра, после принятия решения об установлении нового порога обнаружения текущую серию наблюдений прекращают и переходят к следующей серии наблюдений ранее окончания интервала наблюдения текущей серии.
| СПОСОБ УПРАВЛЕНИЯ ПОРОГОМ В ОПТИМАЛЬНОМ ОБНАРУЖИТЕЛЕ | 2004 |
|
RU2292114C2 |
| RU 99125618 А, 27.09.2001 | |||
| Устройство непараметрическойОбРАбОТКи СигНАлОВ | 1979 |
|
SU809017A1 |
| 0 |
|
SU157391A1 | |
| Адаптирующийся ранговый обнаружитель | 1981 |
|
SU995042A1 |
| 0 |
|
SU221152A1 | |
| US 4914442 A, 03.04.1990 | |||
| US 3946382 A, 23.03.1976 | |||
| US 2006046636 A1, 02.03.2006. | |||

