Изобретение относится к области управления свойствами различных процессов, в частности управлению обнаружителями сигналов, к способам определения и установки величины порога обнаружения и может быть использовано в устройствах сенсорного слоя автоматизированных систем управления.
Из существующего уровня техники известно устройство, представляющее собой адаптивный обнаружитель сигналов, который содержит дискретизатор, корреляционный накопитель, квадраторы, пороговое устройство, перемножители, сумматоры, интегратор, усилитель, формирователь порогового уровня, преобразователь (патент RU № 2204146, G01S 7/36, 7/292, 13/02).
Недостатком приведенного технического решения является необходимость выполнения условия адекватности математической модели в виде аддитивной смеси полезного сигнала (характеризующего объект классификации) и шума, а также отсутствие сведений о расчете коэффициента пропорциональности для вычисления порога принятия решения.
Наиболее близким аналогом по совокупности признаков к предлагаемому является способ управления порогом в оптимальном обнаружителе по патенту RU 2292114, H04B 1/10, принятый за прототип.
Способ-прототип заключается в следующем.
На интервале наблюдения регистрируют изменение сигналов на выходе безынерционных индикаторов неинформативных параметров входного сигнала, которые стохастически связаны с изменением его информативных параметров, устанавливают новую величину порога обнаружения в момент регистрации указанных изменений: оптимальный приемник на основе обработки входного сигнала с дискретной выборкой в момент времени, равный интервалу наблюдения, формирует апостериорную плотность вероятности, описываемую формулой Байеса. Апостериорная плотность вероятности сравнивается с порогом.
В случае изменения сигнала апостериорная плотность вероятности сравнивается с новым порогом. После принятия решения текущая серия наблюдений прекращается и происходит переход к следующей серии наблюдений ранее окончания интервала наблюдения текущей серии.
Недостатками указанного технического решения являются: снижение качества функционирования при неаддитивной модели функциональной зависимости принимаемой реализации случайного процесса от полезного сигнала и шума (например, мультипликативной нелинейной модели), необходимость регулярной настройки (определения новых значений порога) для обеспечения заданных режимов функционирования.
Задачей, на решение которой направлено заявляемое техническое решение, является формирование порога для решающего устройства и повышение точности правильного решения по классификации, принимаемого на его основе при априорной неопределенности модели случайного процесса (функциональной зависимости в ней полезного сигнала и шума).
Для решения поставленной задачи, в способе формирования порога решающего устройства классификации объектов, заключающемся в регистрации изменения информативных параметров и установлении новой величины порога обнаружения в момент регистрации указанных изменений, согласно изобретению, формируют обучающую выборку и осуществляют обучение искусственной нейронной сети, после чего на выходе искусственной нейронной сети формируют порог, который подают на вход решающего устройства для получения реальной выходной реакции Z, то есть решения классификатора.
Заявляемый способ заключается в следующем.
В режиме обучения при регистрации изменения информативных параметров на выходе параметризатора – устройства, выделяющего из набора входных данных совокупности вторичных (существенных) параметров, которые являются определяющими для решаемой задачи, а также из уставки в виде требуемых (эталонных) реакций бинарного вида (0 или 1) формируется обучающая выборка и осуществляется обучение искусственной нейронной сети (ИНС) с целью формирования порога.
При обучении ИНС используется якобиан решающего устройства, представляющий собой производную от функции Хевисайда. Для расчета якобиана, в качестве аппроксимации функции Хевисайда используется сигмоидальная функция. Необходимость применения аппроксимации, а не самой функции Хевисайда обусловлена тем, что производная функции Хевисайда, описывающей объект управления, представляет собой дельта-функцию Дирака, которая принимает значение ноль или стремится к бесконечности в зависимости от аргумента.
В режиме регулирования на выходе нейрорегулятора сформированный порог подается на вход решающего устройства с целью получения выходной реакции (решения классификатора) в виде бинарного сигнала (0 или 1).
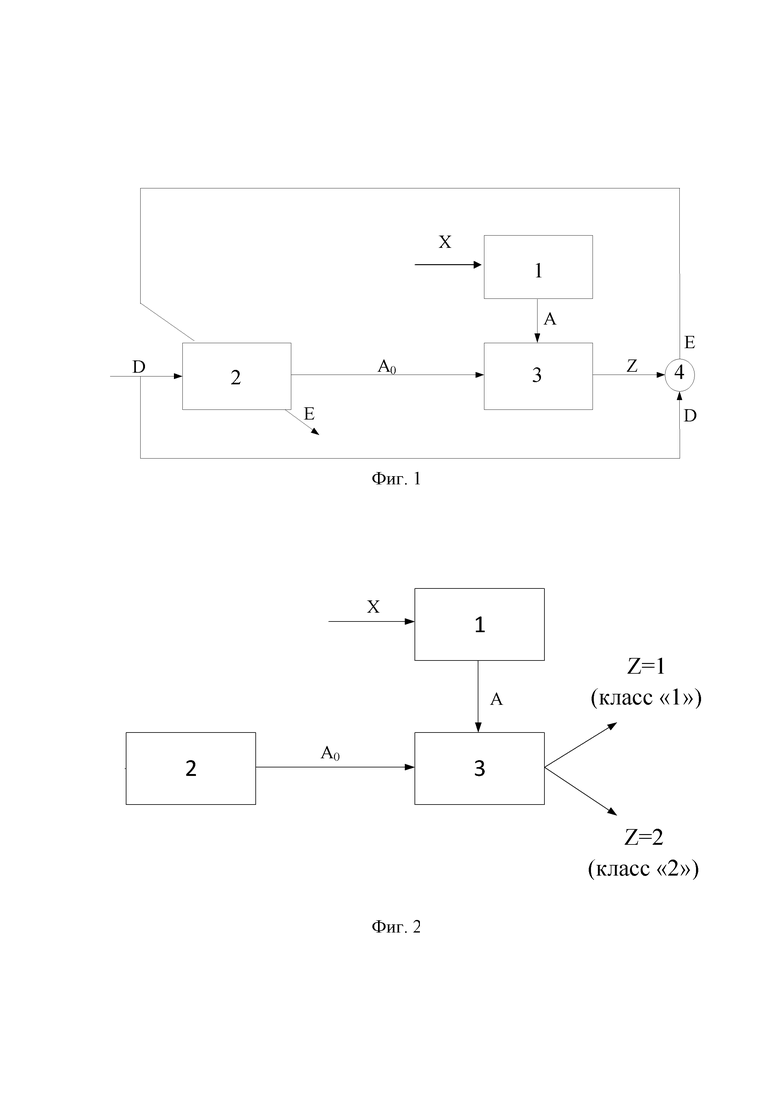
На фиг. 1 схематично изображены основные блоки, реализующие режим обучения нейрорегулятора; на фиг. 2 схематично изображены основные блоки, реализующие режим регулирования.
Заявляемый способ реализуется в устройстве, схема которого представлена на фиг. 1 и фиг. 2, где обозначено:
1 – параметризатор;
2 – нейрорегулятор;
3 – решающее устройство;
4 – вычитатель;
X – сигналы классифицируемых объектов;
A – вторичные параметры на выходе блока параметризатора;
D – уставка;
Z – реальная выходная реакция решающего устройства;
A0 – порог;
E – ошибка управления, рассчитываемая как разность между D и Z.
Устройство (фиг. 1) содержит параметризатор 1, необходимый для формирования вторичных параметров А, нейрорегулятор 2, формирующий порог A0, причем выходы параметризатора 1 и нейрорегулятора 2 соединены с соответствующими входами решающего устройства 3, который формирует реальная выходная реакция Z. Выход решающего устройства 3 соединен с входом вычитателя 4, другой вход которого подключен ко входу нейрорегулятора 2, являющемуся входом устройства и входом уставки D.
Функционирование блоков в режиме обучения описывается следующим образом.
На вход искусственной нейронной сети подается уставка D. В нейрорегуляторе 2 формируется порог A0, вычисляется реальная выходная реакция Z решающего устройства 3. В вычислителе 4 вычисляется сигнал ошибки управления E, корректируются весовые коэффициенты ИНС с использованием алгоритма обратного распространения ошибки Е. Описанный процесс повторяется циклично до достижения приемлемо малого значения сигнала ошибки E, заданного критерием останова обучения, либо до достижения установленного максимального количества эпох обучения ИНС.
В режиме регулирования на выходе нейрорегулятора 2 сформированный порог A0 подается на вход решающего устройства 3 с целью получения реальной выходной реакции Z (решения классификатора).
На фиг. 2 схематично изображены основные блоки, реализующие режим регулирования. В данном режиме обученный нейрорегулятор 2 формирует порог A0, а параметризатор 1 формирует вторичные параметры А, которые сравниваются с полученным порогом A0, после чего в бинарном виде формируется реальная выходная реакция Z решающего устройства 3: «1» – в случае, когда вторичный параметр не превышает значение порога A0, «2» – в случае, когда вторичный параметр превышает значение порога A0. В соответствии с реальной выходной реакцией Z решающего устройства 3 принимается решение о принадлежности объекта к тому или иному классу.
По результатам проведенного исследования, сформированный с помощью нейрорегулятора 2 порог A0 позволяет решающему устройству 3 правильным образом классифицировать объекты.
В промышленности возможна реализация нейрорегулятора на базе матричного многоядерного процессора SEAforth40, а также на базе системы CNAPS (система связанных сетей адаптированных процессоров) – коммерчески доступный мультипроцессорный чип.
Технический результат от использования заявляемого изобретения заключается в повышении точности классификации объектов (различения их сигналов) за счёт эффективной обработки слабо формализованных, разнородных, зашумленных входных данных.
Технический результат достигается тем, что в заявляемом способе используется нейрорегулятор, функционирующий в двух режимах: режим обучения и режим регулирования (режим формирования порога).
Преимущество способа заключается в том, что при отсутствии априорной информации о параметрах сигналов классифицируемых объектов может быть получена минимальная ошибка классификации объектов на основе данных из обучающей выборки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСКУССТВЕННАЯ НЕЙРОННАЯ СЕТЬ | 2014 |
|
RU2573766C1 |
| МЕТОД РЕЗЕРВИРОВАНИЯ КАНАЛОВ КОНСТРУКТИВНО-ФУНКЦИОНАЛЬНЫХ МОДУЛЕЙ БОРТОВЫХ ЦИФРОВЫХ ВЫЧИСЛИТЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИНТЕЛЛЕКТУАЛЬНОЙ ДИАГНОСТИЧЕСКОЙ СИСТЕМЫ В УСЛОВИЯХ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2021 |
|
RU2778366C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ИНФОРМАЦИОННО-ПРЕОБРАЗУЮЩИХ ЭЛЕМЕНТОВ БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНОГО СУДНА НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2022 |
|
RU2802976C1 |
| СПОСОБ И СИСТЕМА НЕИНВАЗИВНОЙ СКРИНИНГОВОЙ ОЦЕНКИ ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ И ПАТОЛОГИЙ | 2016 |
|
RU2657384C2 |
| СПОСОБ ОБУЧЕНИЯ ИСКУССТВЕННОЙ НЕЙРОННОЙ СЕТИ | 2012 |
|
RU2504006C1 |
| УСТРОЙСТВО ВЫЧИСЛЕНИЯ СТЕПЕНИ ДОВЕРИЯ К СРЕДСТВУ РАЗВЕДКИ | 2023 |
|
RU2813682C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ МОЗГ-КОМПЬЮТЕР | 2019 |
|
RU2704497C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЧЕЛОВЕКА ПО ЭЭГ-ОТКЛИКУ НА НЕОДНОЗНАЧНЫЕ ИЗОБРАЖЕНИЯ | 2017 |
|
RU2653239C1 |
| УСТРОЙСТВО ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2024 |
|
RU2831917C1 |
| Способ обучения искусственной нейронной сети | 2019 |
|
RU2723270C1 |
Изобретение относится к способу формирования порога решающего устройства классификации объектов. Технический результат заключается в повышении точности классификации объектов. В способе в режиме обучения при регистрации изменения информативных параметров на выходе параметризатора, выделяющего из набора входных данных совокупности вторичных параметров, являющихся определяющими для решаемой задачи, а также из уставки в виде требуемых реакций бинарного вида формируют обучающую выборку и осуществляют обучение искусственной нейронной сети (ИНС) в виде нейрорегулятора, в котором формируется порог, на основе которого в решающем устройстве вычисляется реальная выходная реакция Z, а в вычитателе вычисляется сигнал ошибки управления, корректируются весовые коэффициенты нейронной сети с использованием алгоритма обратного распространения ошибки, при обучении ИНС используется якобиан решающего устройства, представляющий собой производную от функции Хевисайда, для расчета якобиана в качестве аппроксимации функции Хевисайда используется сигмоидальная функция; в режиме регулирования обученный нейрорегулятор формирует порог, а параметризатор формирует вторичные параметры, которые сравниваются с полученным порогом, после чего в бинарном виде формируется реальная выходная реакция Z решающего устройства. 2 ил.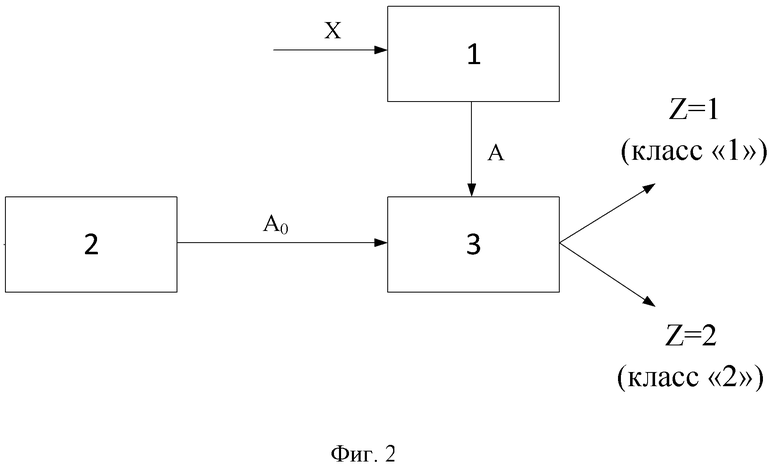
Способ формирования порога решающего устройства классификации объектов, заключающийся в регистрации изменения информативных параметров и установлении новой величины порога обнаружения в момент регистрации указанных изменений, отличающийся тем, что в режиме обучения при регистрации изменения информативных параметров на выходе параметризатора, выделяющего из набора входных данных совокупности вторичных параметров, которые являются определяющими для решаемой задачи, а также из уставки в виде требуемых реакций бинарного вида, формируют обучающую выборку и осуществляют обучение искусственной нейронной сети (ИНС) в виде нейрорегулятора, в котором формируется порог, на основе которого в решающем устройстве вычисляется реальная выходная реакция Z, а в вычитателе вычисляется сигнал ошибки управления, после чего корректируются весовые коэффициенты нейронной сети с использованием алгоритма обратного распространения ошибки, при этом данный процесс повторяется циклично до достижения предустановленного приемлемо малого значения сигнала ошибки, кроме того, при обучении ИНС используется якобиан решающего устройства, представляющий собой производную от функции Хевисайда, для расчета якобиана в качестве аппроксимации функции Хевисайда используется сигмоидальная функция; в режиме регулирования обученный нейрорегулятор формирует порог, а параметризатор формирует вторичные параметры, которые сравниваются с полученным порогом, после чего в бинарном виде формируется реальная выходная реакция Z решающего устройства, то есть решения классификатора.
| СПОСОБ УПРАВЛЕНИЯ ПОРОГОМ В ОПТИМАЛЬНОМ ОБНАРУЖИТЕЛЕ | 2004 |
|
RU2292114C2 |
| АДАПТИВНЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 2001 |
|
RU2204146C2 |
| CN 103761210 B, 13.02.2018 | |||
| CN 108647874 A, 12.10.2018 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| CN 106096635 A, 09.11.2016 | |||
| Предохранительное устройство для паровых котлов, работающих на нефти | 1922 |
|
SU1996A1 |
| CN 109389058 A, 26.02.2019. | |||

