Текст описания приведен в факсимильном виде.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО, ОБЛЕГЧАЮЩЕЕ ХОДЬБУ | 2006 |
|
RU2389469C2 |
| УСТРОЙСТВО, ОБЛЕГЧАЮЩЕЕ ХОДЬБУ | 2006 |
|
RU2389468C9 |
| СПОСОБ УПРАВЛЕНИЯ ОРТОПЕДИЧЕСКИМ СУСТАВОМ | 2008 |
|
RU2484789C2 |
| Экзоскелет | 2023 |
|
RU2830368C1 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| ПРОТЕЗ СТОПЫ С НАСТРАИВАЕМЫМИ ХАРАКТЕРИСТИКАМИ | 2005 |
|
RU2345737C2 |
| ПРОТЕЗ СТОПЫ С РЕГУЛИРУЕМОЙ ФУНКЦИЕЙ | 2002 |
|
RU2291676C2 |
| СПОСОБ УПРАВЛЕНИЯ ИСКУССТВЕННЫМ ОРТЕЗНЫМ ИЛИ ПРОТЕЗНЫМ КОЛЕННЫМ СУСТАВОМ | 2014 |
|
RU2661000C2 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ АМОРТИЗАЦИЕЙ ПРОТЕЗНОГО КОЛЕНА В ФАЗЕ СТОЯНИЯ, СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ АМОРТИЗАЦИЕЙ МОМЕНТА ПРОТЕЗНОГО КОЛЕНА В ФАЗЕ ХОДЬБЫ, ПРОТЕЗНОЕ КОЛЕНО, ПРИСПОСАБЛИВАЮЩЕЕСЯ ДЛЯ УПРАВЛЕНИЯ МОМЕНТОМ АМОРТИЗАЦИИ ВО ВРЕМЯ ФАЗЫ СТОЯНИЯ ЧЕЛОВЕКА БЕЗ НОГИ, И ПРОТЕЗНЫЙ УЗЕЛ | 2001 |
|
RU2271779C2 |
| ОРТОПЕДИЧЕСКОЕ УСТРОЙСТВО | 2013 |
|
RU2652893C2 |
Группа изобретений относится к приспособлениям, помогающим ходить пациентам или людям с ограниченными возможностями в движении. Устройство имеет принимающую часть, принимающую часть веса пользователя прилагаемого сверху и пару левых и правых протезных полосок. Полоски присоединены к принимающей части через первые сочленения с блоками присоединения стопы на нижних концах протезных полосок, которые присоединены к стопам ног пользователя соответственно. Протезные полоски присоединены к принимающей части таким образом, что когда каждая нога пользователя находится в положении стоя, линия действия поддерживающей силы, передаваемой от третьего сочленения протезной полоски на раму голени из поддерживающей силы, действующей на протезную полоску, со стороны пола, проходит через специфическую точку. Точка расположена над принимающей частью внутри переднезадней ширины контактной поверхности между принимающей частью и пользователем от третьего сочленения, при рассмотрении в сагиттальной плоскости. В результате можно стабильно для пользователя прилагать желаемую подъемную силу для снижения веса, воспринимаемого ногами пользователя. 2 н. и 4 з.п. ф-лы, 18 ил.
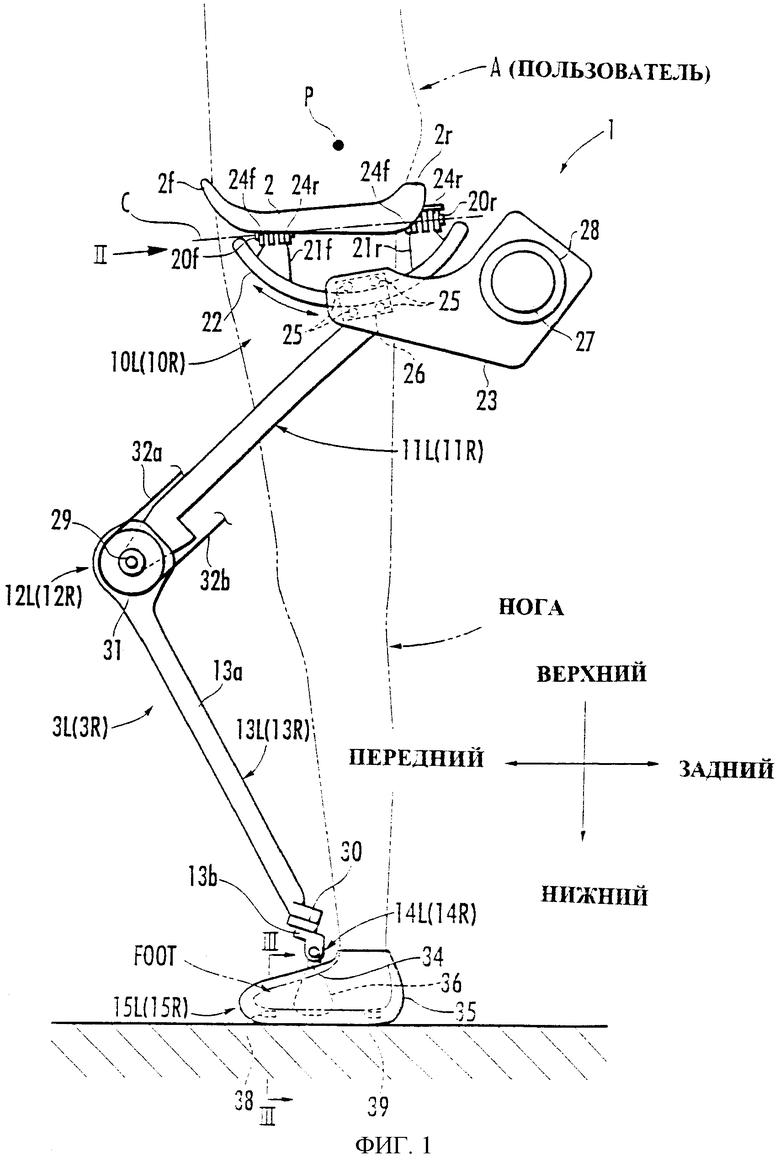
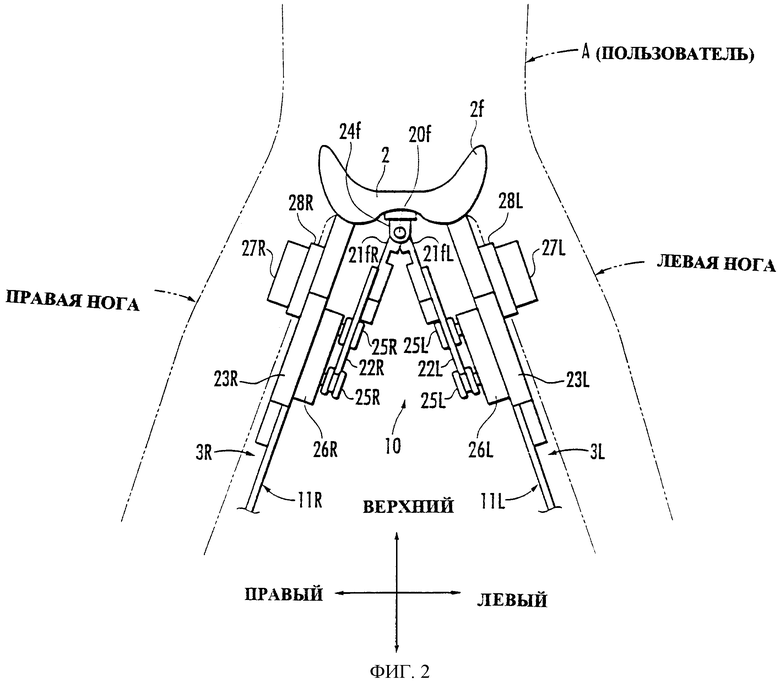
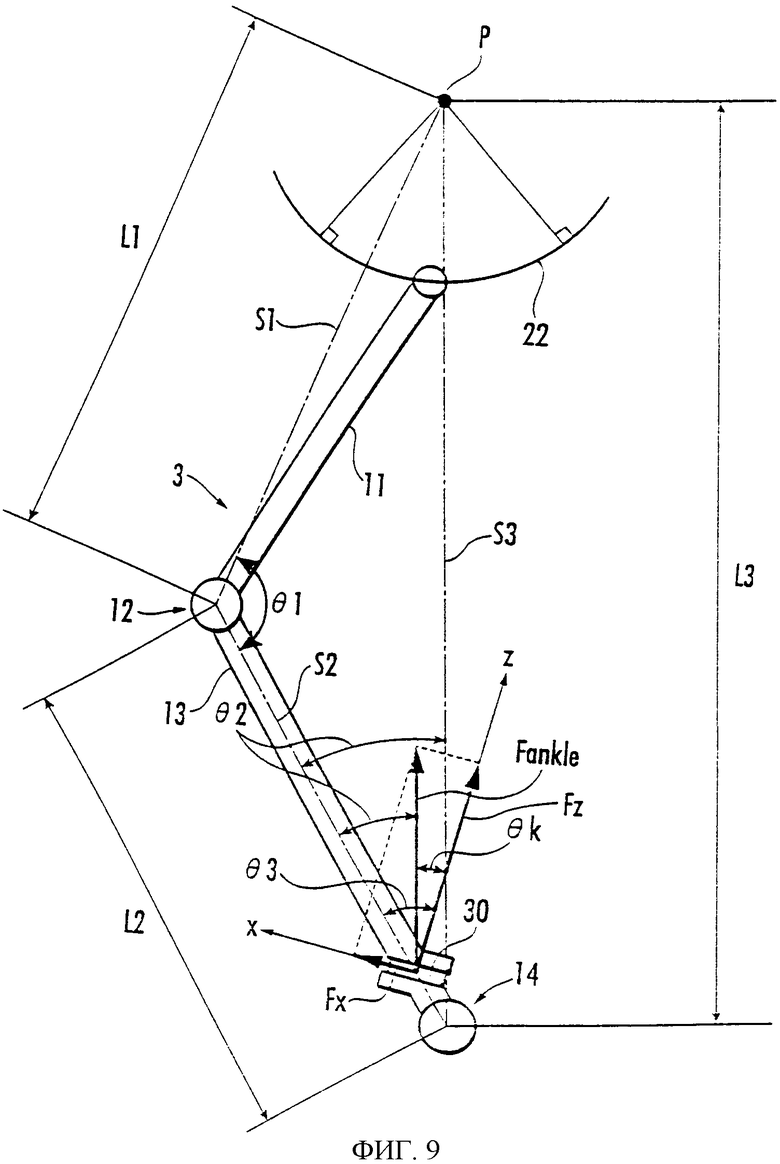
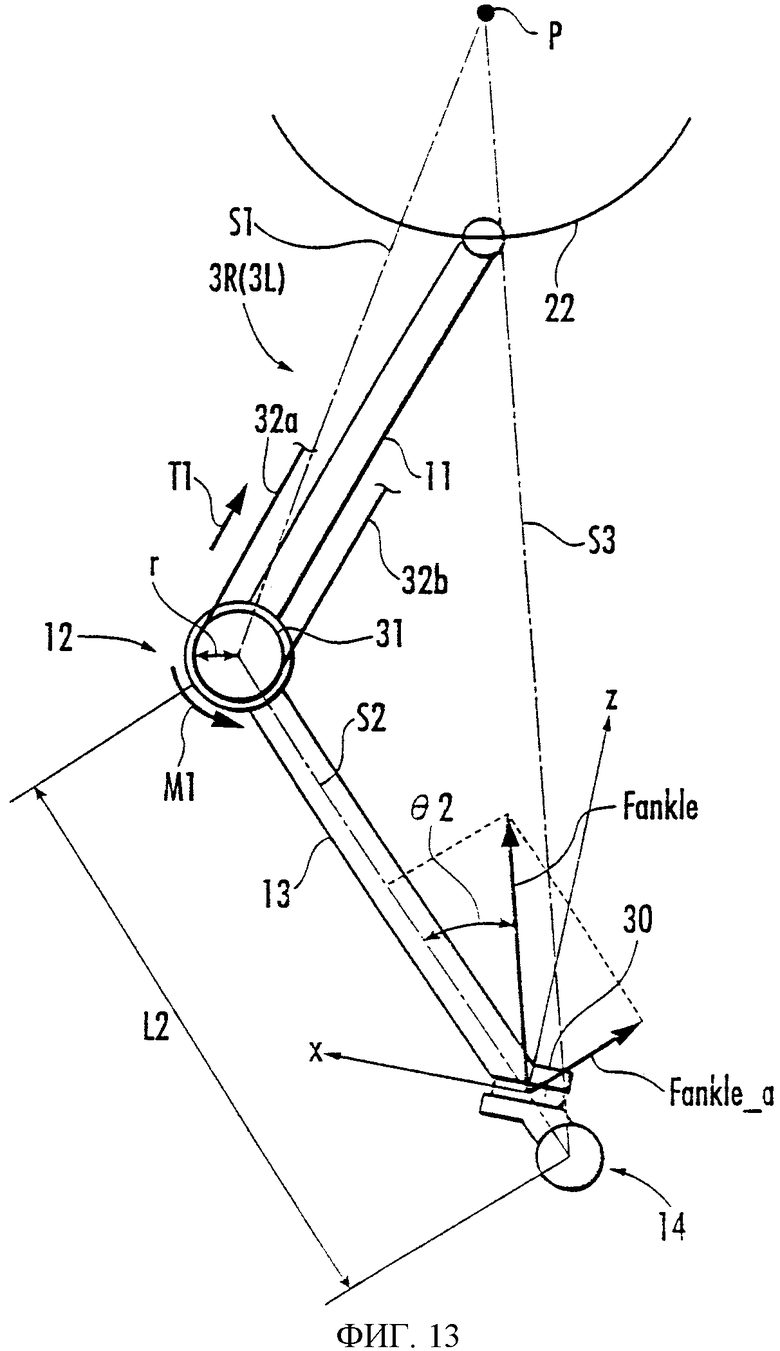
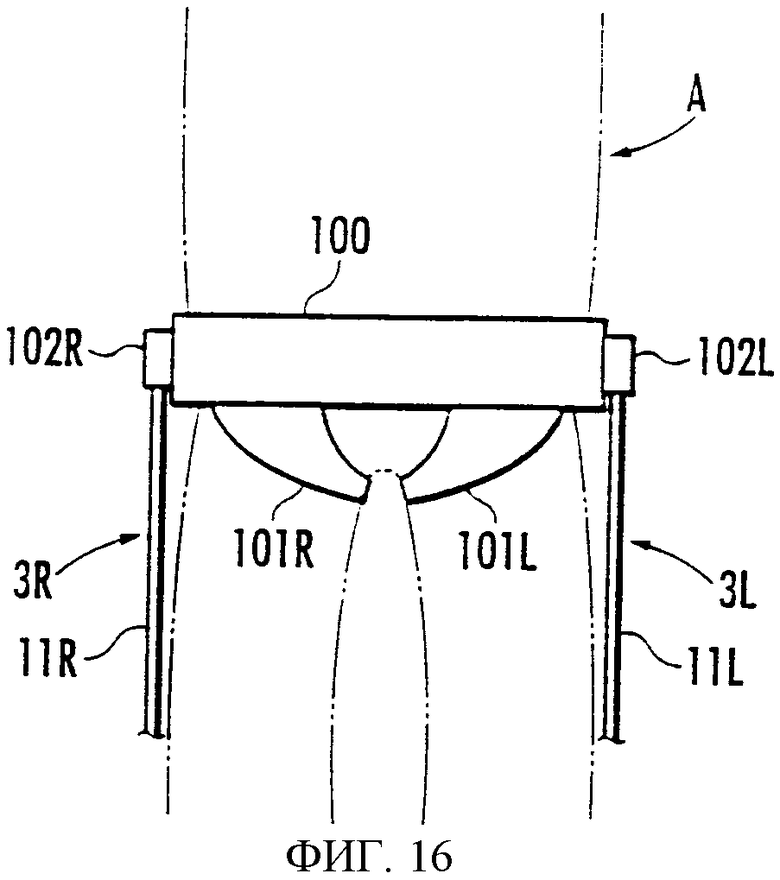
1. Устройство, облегчающее ходьбу, имеющее: принимающую часть, расположенную между основанием обеих ног пользователя таким образом, чтобы принимать часть веса пользователя сверху; пару левой и правой бедренных рам, соответственно соединенную с принимающей частью через первые сочленения; пару левой и правой рамы голени, соответственно присоединенной к бедренным рамам через вторые сочленения; пару левого и правого блока присоединения стопы, соответственно присоединенных к раме голени через третьи сочленения и соответственно прикрепленных к стопам левой и правой ног пользователя и вступающих в контакт с землей, когда ноги пользователя находятся в положении стоя; приводной механизм для левой стороны, приводящий в действие второе сочленение из числа сочленений левой протезной полоски, состоящей из первого сочленения, бедренной рамы, второго сочленения, рамы голени, третьего сочленения и блока присоединения стопы на левой стороне; и приводной механизм для правой стороны, приводящий в действие второе сочленение из числа сочленений правой протезной полоски, состоящей из первого сочленения, бедренной рамы, второго сочленения, рамы голени, третьего сочленения и блока присоединения стопы на правой стороне; при этом вторые сочленения протезных полосок приводятся в действие приводными механизмами таким образом, что к пользователю прилагаются поднимающие вверх силы от принимающей части, отличающееся тем, что:
каждая протезная полоска соединена с принимающей частью таким образом, чтобы направление действия поддерживающей силы, прилагаемой к раме голени от третьего сочленения каждой протезной полоски соответствующей ноге, когда каждая нога пользователя находится в положении стоя, проходит через заранее заданную точку, расположенную над принимающей частью внутри переднезадней ширины контактной поверхности между принимающей частью и пользователем, от третьего сочленения, когда протезная полоска рассматривается в сагиттальной плоскости пользователя; и
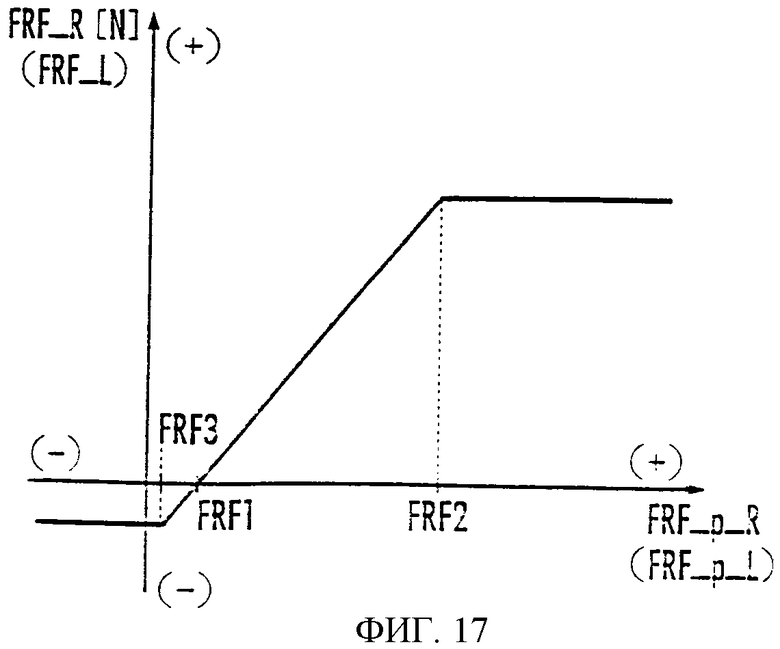
устройство, облегчающее ходьбу, включает средство, прилагающее подъемные силы к пользователю путем управления приводными механизмами таким образом, чтобы подлежащие контролю силы достигали бы заранее заданных желаемых значений для соответствующих полосок, при этом поддерживающие силы являются подлежащими контролю силами.
2. Устройство, облегчающее ходьбу по п.1, отличающееся тем, что первое сочленение каждой протезной полоски является сочленением, соединяющим бедренную раму протезной полоски и принимающую часть таким образом, чтобы протезная полоска могла свободно перемещаться по крайней мере в переднем/заднем направлении, при этом заранее заданная точка является центральной точкой перемещения.
3. Устройство, облегчающее ходьбу по п.1, отличающееся тем, что первое сочленение каждой протезной полоски является сочленением, соединяющим бедренную раму протезной полоски и принимающую часть таким образом, чтобы протезная полоска могла свободно перемещаться в переднем/заднем направлении, и в левом/правом направлении, и отличающееся тем, что центральная точка перемещения вперед/назад протезной полоски расположена над принимающей частью в качестве заранее заданной точки.
4. Устройство, облегчающее ходьбу по п.1, отличающееся тем, что предусмотрен приводной механизм для левой стороны и приводной механизм для правой стороны, присоединенные к бедренной раме в местах, расположенных более близко к принимающей части, чем ко вторым сочленениям, соответственно, и при этом устройство, облегчающее ходьбу далее включает пару левых и правых средств передачи мощности, передающих приводные силы приводных механизмов на второе сочленение, соответственно.
5. Устройство, облегчающее ходьбу по п.1, отличающееся тем, что далее включает:
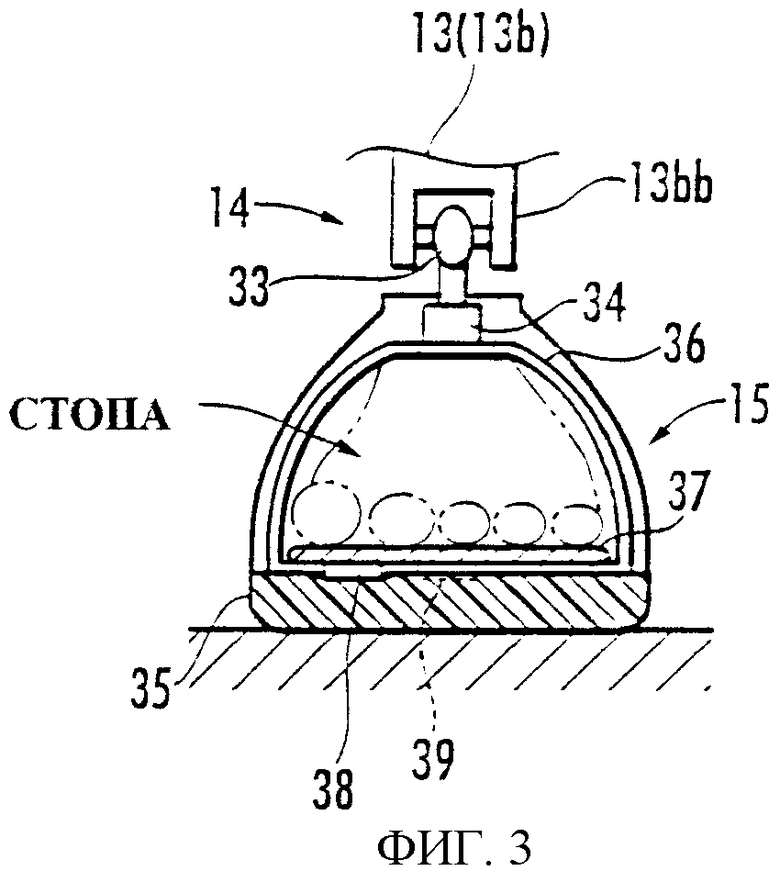
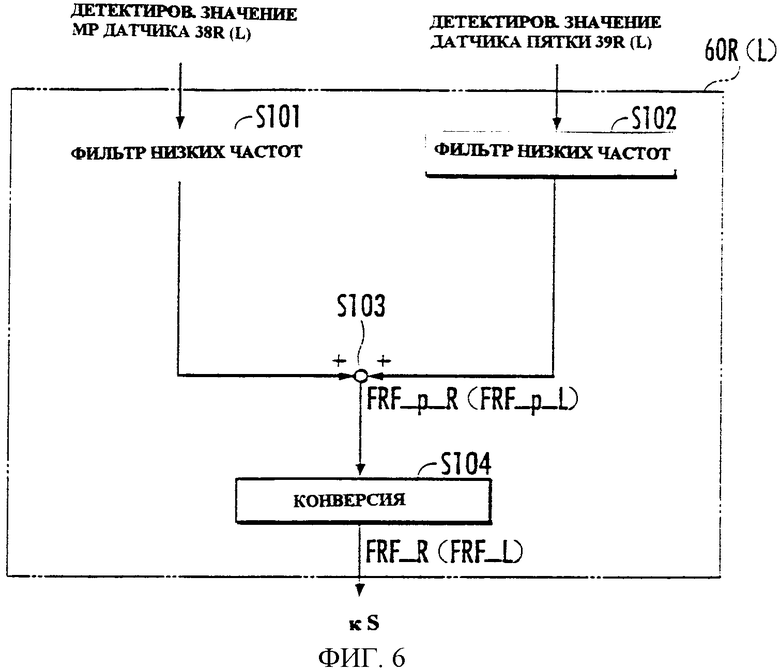
средство измерения силы надавливания, измеряющее силу надавливания каждой ноги пользователя на основе детектированного значения силы, указанного выходом первого датчика силы, предусмотренного в каждом блоке присоединения стопы;
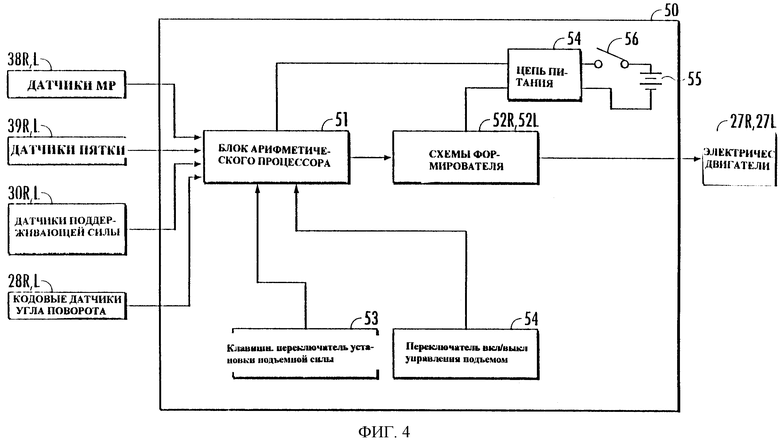
клавишный переключатель установки подъемной силы, устанавливающий желаемую подъемную силу, являющуюся желаемым значением поднимающей вверх подъемной силы, которая должна прилагаться к пользователю от принимающей части;
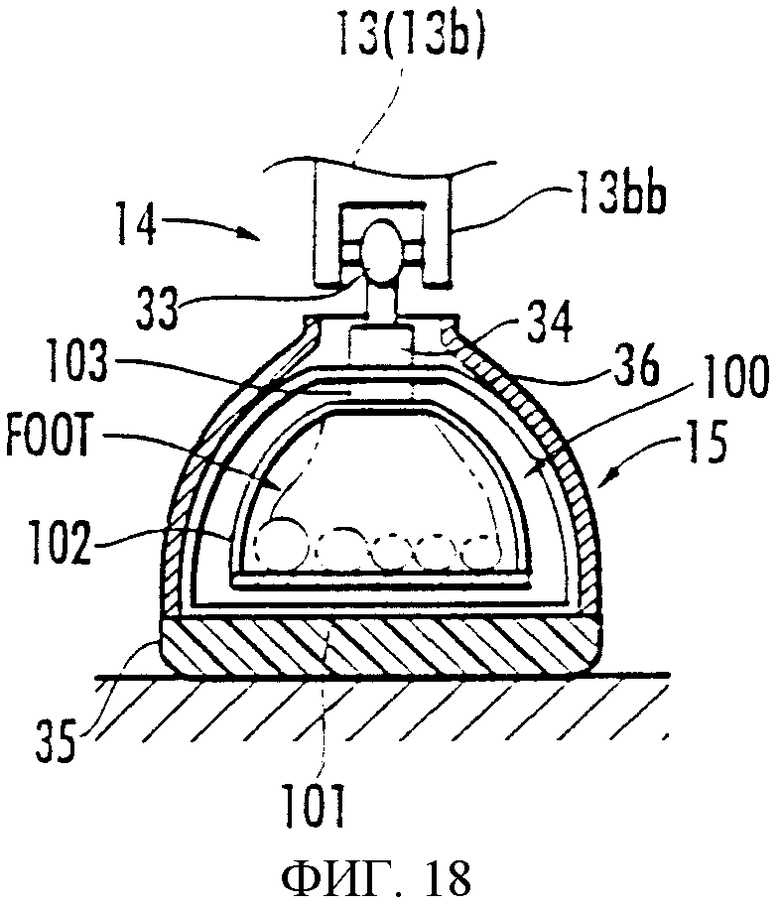
второй датчик силы, вставленный между нижним концом рамы голени каждой протезной полоски и третьим ее сочленением или между третьим сочленением каждой протезной полоски и ее блоком присоединения стопы;
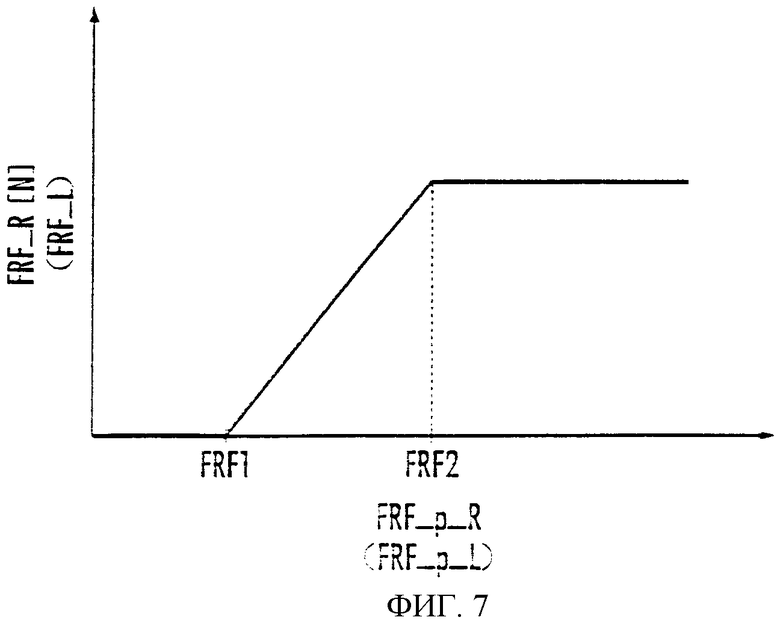
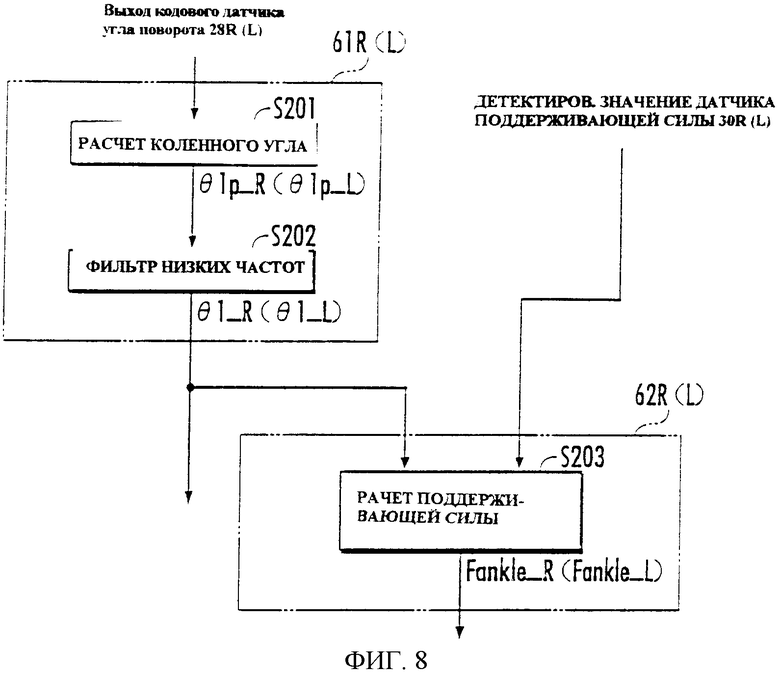
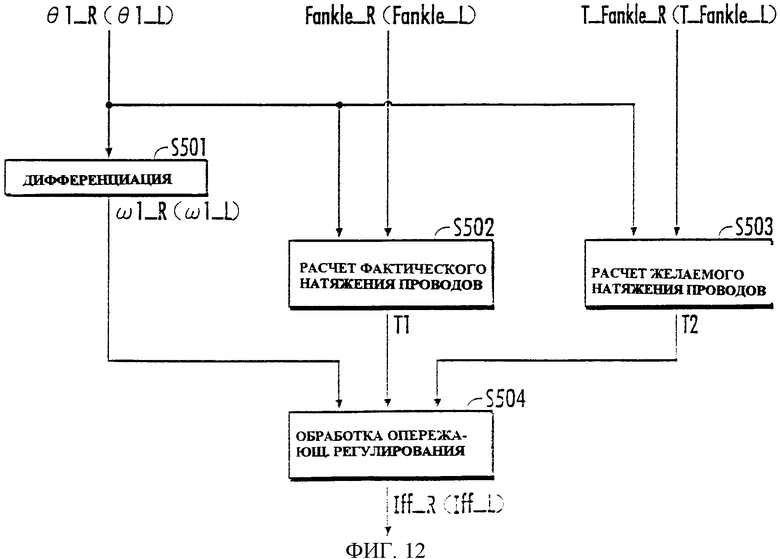
средство измерения подлежащей контролю силы, измеряющее поддерживающую силу фактически прилагаемую к раме голени от третьего сочленения каждой протезной полоски в качестве силы, которая должна контролироваться на основании детектированного значения силы указанного выходом второго датчика силы;
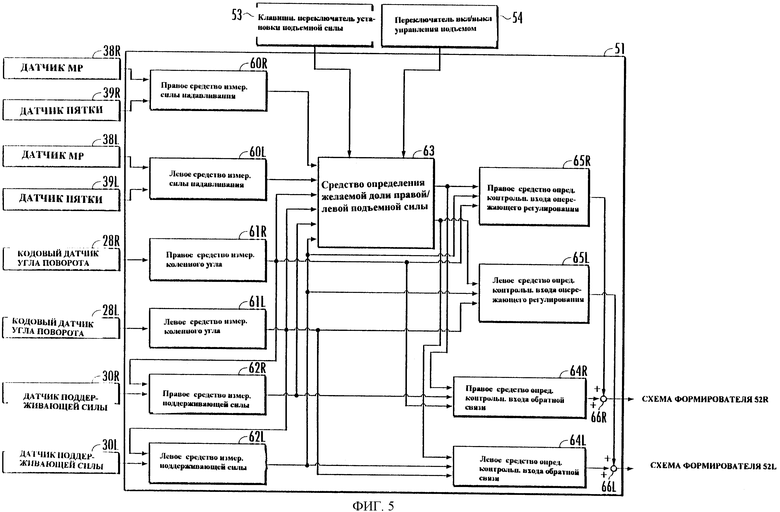
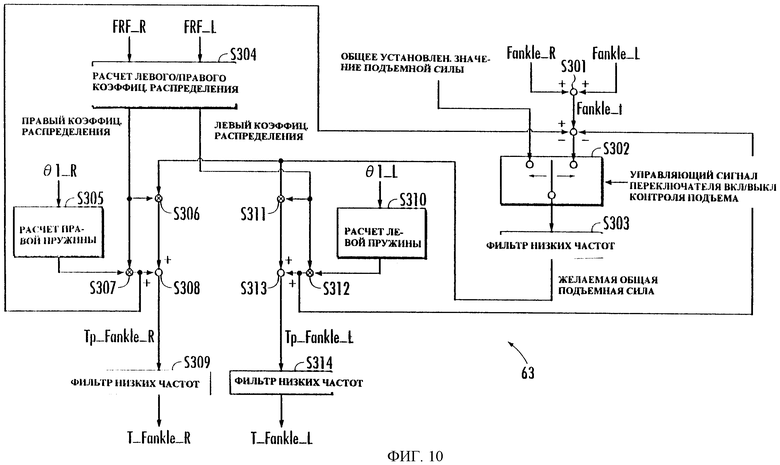
средство определения общей желаемой подъемной силы, определяющее общую сумму желаемой подъемной силы и поддерживающей силы для поддержания веса, полученную вычитанием общего веса элементов под вторыми датчиками силы из веса всего устройства, облегчающего ходьбу, из состава веса устройства, облегчающего ходьбу на полу, или общую сумму желаемой подъемной силы и поддерживающей силы для поддержания веса всего устройства, облегчающего ходьбу, на полу, в качестве общей желаемой подъемной силы;
средство распределения, определяющее желаемую долю для левой протезной полоски и желаемую долю для правой протезной полоски из общей желаемой подъемной силы путем распределения общей желаемой подъемной силы на протезные полоски на основании соотношения между силой надавливания левой ноги и силой надавливания правой ноги пользователя; и
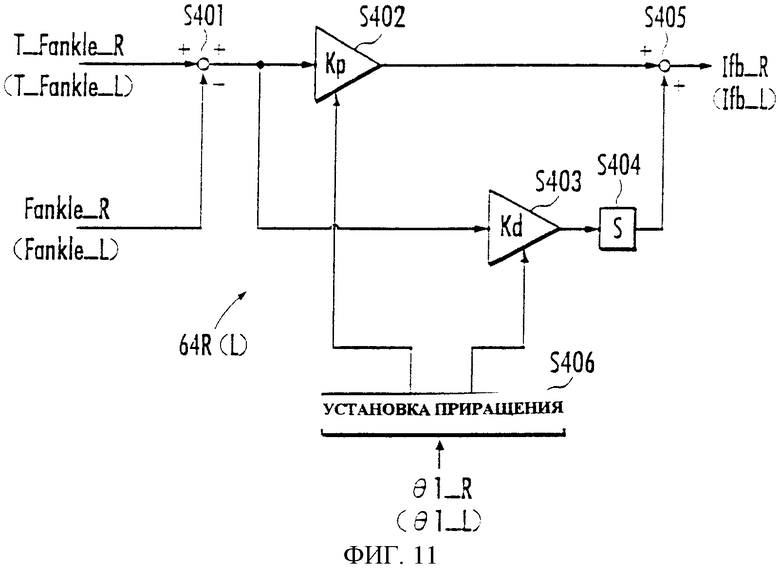
средство управления приводным механизмом, управляющее приводным механизмом для левой стороны таким образом, чтобы разница между подлежащей контролю силой для левой протезной полоски и желаемой долей для нее приближалась к нулю на основании силы, подлежащей контролю для левой протезной полоски, и желаемой доли для левой протезной полоски и управляющее приводным механизмом для правой стороны таким образом, чтобы разница между подлежащей контролю силой для правой протезной полоски и желаемой долей приближалась бы к нулю на основании подлежащей контролю силы для правой протезной полоски и желаемой доли для правой протезной полоски.
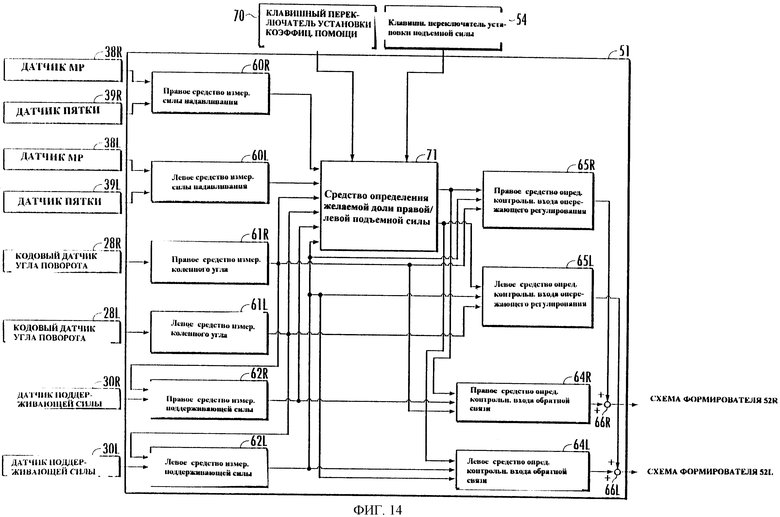
6. Контроллер для устройства, облегчающего ходьбу в соответствии с п.1, отличающееся тем, что далее включает:
средство измерения силы надавливания, измеряющее силу надавливания каждой ноги пользователя на основании детектированного значения силы, указанного выходом первого датчика силы, предусмотренного в каждом блоке присоединения стопы;
второй датчик силы, вставленный между нижним концом рамы голени каждой протезной полоски и ее третьим сочленением или между третьим сочленением каждой протезной полоски и ее блоком присоединения стопы;
средство измерения подлежащей контролю силы, измеряющее поддерживающую силу, фактически прилагаемую к раме голени от третьего сочленения каждой протезной полоски в качестве подлежащей контролю силы на основании детектированного значения силы, указанного выходом второго датчика силы;
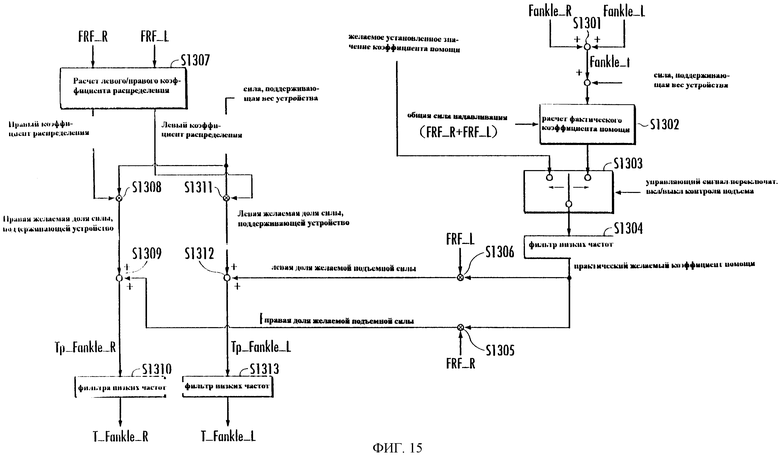
клавишный переключатель установки коэффициента помощи, устанавливающий желаемый коэффициент помощи, являющийся желаемым значением коэффициента силы, которая будет оказывать помощь устройством, облегчающим ходьбу, из общей силы надавливания, являющейся общей суммой силы надавливания ног пользователя по отношению к общей силе надавливания;
средство определения желаемой доли подъемной силы, определяющее желаемую долю подъемной силы, являющуюся желаемым значением доли для левой протезной полоски и желаемую долю подъемной силы, являющуюся желаемым значением доли для правой протезной полоски из общей поднимающей вверх силы, которая будет прилагаться к пользователю от принимающей части путем умножения сил надавливания соответствующих ног пользователя на желаемый коэффициент помощи;
средство распределения, определяющее долю для левой протезной полоски и долю для правой протезной полоски из поддерживающей силы в качестве желаемой поддерживающей силы устройства для соответствующих протезных полосок путем распределения поддерживающей силы для поддержания веса, получаемого путем вычитания общего веса элементов под вторым датчиком силы из устройства, облегчающего ходьбу из веса всего устройства, облегчающего ходьбу на полу, или поддерживающей силы для поддержания веса всего устройства, облегчающего ходьбу на полу, на ноги в соответствии с соотношением между силой надавливания левой ноги пользователя и силой надавливания правой ноги пользователя;
средство определения желаемого значения подлежащей контролю силы, определяющее общую сумму желаемой доли подъемной силы для левой ноги и желаемую долю подъемной силы в качестве желаемого значения подлежащей контролю силы для левой ноги и определяющее общую сумму желаемой доли подъемной силы для правой ноги и желаемую долю подъемной силы в качестве желаемого значения подлежащей контролю силы для правой ноги; и
средство управления приводным механизмом, управляющее приводным механизмом для левой стороны таким образом, чтобы разница между подлежащей контролю силой для левой ноги и ее желаемым значением приближалась к нулю на основании подлежащей контролю силы для левой ноги и желаемого значения подлежащей контролю силы для левой ноги и управляющее приводным механизмом для правой стороны таким образом, чтобы разница между подлежащей контролю силой для правой ноги и ее желаемым значением приближалась к нулю на основании подлежащей контролю силы для правой ноги и желаемого значения подлежащей контролю силы для правой протезной полоски.
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| УСТРОЙСТВО ДЛЯ ОБЛЕГЧЕНИЯ ХОДЬБЫ И ПЕРЕНОСКИ ГРУЗОВ | 1994 |
|
RU2118147C1 |
| Способ и устройство для концентрации головных примесей при периодической ректификации спирта | 1939 |
|
SU58911A1 |

