Изобретение относится к области авиастроения и может использоваться с целью увеличения возможностей сферы практического применения на летательных аппаратах в любой области авиации.
Имеется летательный аппарат (№ 2003136456 www.fips.ru), содержащий раму с горизонтальным стабилизатором руля направления, двигатель, механизмы управления, а также несущее устройство, выполненное в форме двух одинаковых по конструкции несущих дисков, установленных соосно, подвижная втулка которых шарнирно закреплена на раме и соединена с планерной ручкой, каждый из которых является одновременно пневмостатическим двигателем и движителем вертикального подъема, причем в верхней части несущего диска выполнены два глухих, открывающихся в сторону от оси вращения развернутых относительно друг друга на 180 градусов канала.
Недостатком данного устройства является следующее: значительные размеры диаметров дисков для создания вертикального подъема, значительный вес дисков, влияющий на грузоподъемности аппарата, неполное использование затрачиваемой мощности, сложность в управлении.
Известно устройство («Моделист-конструктор», 1987, третий выпуск, стр.20-24 В.Кондратьев) создания подъемной силы для вертикального подъема и авторотации, применяемых в винтокрылых летательных аппаратах.
Устройство в упрощенном виде - это вертикально установленный подъемно-несущий винт, представляющий собой конструкцию, состоящую из ступицы с закрепленными к ней лопастями, установленными под определенным углом. При вращении винта за счет угла установки и площади поверхностей лопастей возникает подъемная сила Y. Геометрические параметры лопастей, угол установки и скорость вращения подъемно-несущего винта - основные определяющие параметры грузоподъемности и габаритов летательных аппаратов с вертикальным подъемом.
Недостатком данного устройства являются:
- строгое следование характеристикам поляры и аэродинамического качества лопасти;
- значительные размеры диаметра винта;
- консольное расположение лопастей ограничивает удельную нагрузку на их поверхность;
- неполное использование затрачиваемой мощности;
- использование дополнительного рулевого винта, гасящего реактивный момент;
- другое.
Имеется изобретение US 5100080 A, содержащее способ, обеспечивающий подъем и движение летательного аппарата с использованием максимальной эффективности затрачиваемой мощности, что осуществляется с применением устройств в виде однотипных роторов, имеющих крылья, положение которых определено системой управления и контроля в соответствии с условиями полета в режиме реального времени. Каждых ротор имеет центральный вал, вращающийся от силовой установки и установленный на двух опорах, расположенных на корпусе. На центральном вале зафиксированы два фланца, между которыми симметрично расположены пять крыльев с валами, а также зубчатое колесо, обеспечивающее кинематическую связь зубчатой передачей между фазовращателем и валами крыльев через механизмы пяти гидроприводов, расположенных на одном из фланцев. Фазовращатель и гидроприводы через систему устройств управления и контроля определяют необходимые положения крыльев для осуществления полетов.
Недостатком указанного устройства являются сложность систем управления и контроля для необходимых положений крыльев при их траектории в полете, то есть в системе изменяющихся условий; а так как в упрощенном виде кинематическая схема устройства для крыла в отдельности - это дифференциальный механизм, имеющий две степени свободы, так как два звена в нем приводятся не зависимо друг от друга и для определения какой-либо из трех величин (дифференциал) две должны быть заданы; а при наличии нескольких роторов, с пятью крыльями на каждом, сложность системы управления и контроля увеличивается, а при изменчивых условиях полета в несколько раз. В целях обеспечения надежности требуется дублирование ряда устройств из-за их операционной взаимосвязанности-зависимости. И последнее, суммарный вес систем управления и контроля, а также механизмов привода крыльев негативно отразится на летных качествах летательного аппарата.
Задачей изобретения являются увеличение возможностей в сферах практического применения и обеспечения безопасности эксплуатации летательных аппаратов с вертикальным подъемом.
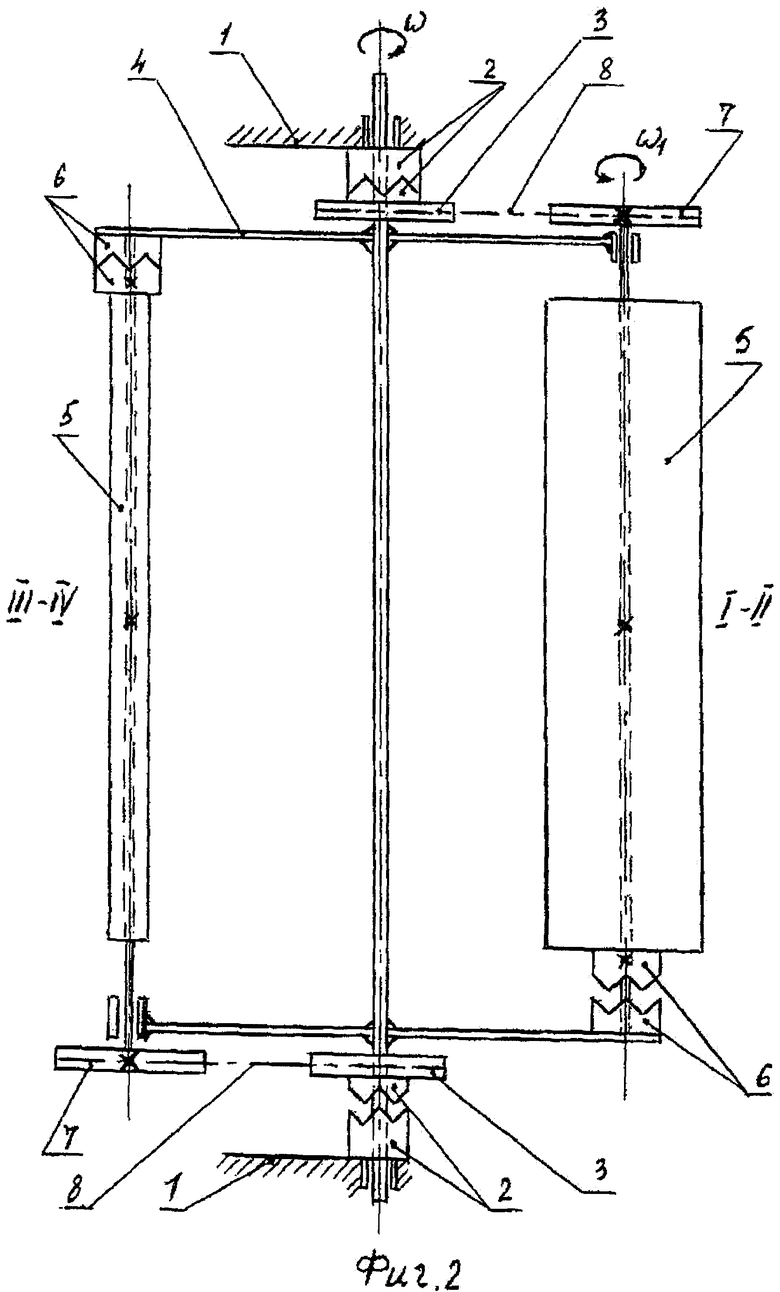
Поставленная задача достигается тем, что, создавая заданную траекторию крыла - переносного и относительного движений при сложном вращении вокруг двух параллельных осей - осуществляется вертикальный подъем и движение летательного аппарата с оптимальными изменениями углов атаки крыла, зависящими от их фазовых углов траектории.
Устройство представляет собой подъемно-несущий элемент летательного аппарата с вертикальным подъемом.
Изобретение поясняется чертежами: фиг.1 - траектория крыла, фиг.2 - упрощенная кинематическая схема.
Устройство, представляющее собой подъемно-несущий элемент, установленный в верхней части боковых сторон фюзеляжа, состоит из двух спаренных однотипных конструкций.
Каждая конструкция устройства содержит опорную раму 1 (фиг.2), на оси вращения которой размещены: зубчатые муфты сцепления 2, обеспечивающие фиксацию либо вращение зубчатых шкивов 3, и двухопорный вал в виде крестовины 4. На валу в виде крестовины 4 находятся: четыре двухопорных вала 5, на каждом из которых расположено крыло (количество может быть иным) и зубчатые муфты сцепления 6, обеспечивающие фиксацию либо вращение валов с крыльями 5 вокруг собственной оси. На валу крыла 5 имеется жестко посаженный зубчатый шкив 7, который совместно с зубчатым шкивом 3 охвачен зубчатым ремнем 8.
Принцип работы (фиг.1, 2) основан на переносном и относительном движениях при сложном вращении вокруг двух параллельных осей в I и II четвертях и переносном в III и IV четвертях окружности и заключается в следующем:
- силовая установка летательного аппарата (не показана) передает крутящий момент на вал в виде крестовины 4;
- вал в виде крестовины 4 переносит валы с крыльями 5 вокруг собственной оси (переносное движение) угловой скоростью ω;
- находясь в I и II четвертях, валы с крыльями 5 вращаются вокруг собственной оси (относительное движение) с угловой скоростью ω1, равной угловой скорости ω, вал в виде крестовины 4 (ω=ω1). Данное вращение совершается за счет равенства диаметров зубчатых шкивов 3 и 7, охваченных зубчатым ремнем 8. При этом зубчатый шкив 3 зафиксирован зубчатой муфтой сцепления 2 - муфта включена, а зубчатая муфта 6 - выключена, обеспечивая вращение валов с крыльями 5 через зубчатый шкив 7;
- в III и IV четвертях происходит обратный процесс - зубчатая муфта сцепления 6 фиксирует крыло 5 (муфта включена) с зубчатым шкивом 7, а зубчатая муфта сцепления 2 выключена, обеспечивая вращение зубчатого шкива 3. Весь цикл повторяется.
Наличие четырех валов с крыльями 5 объясняется суммарным постоянством значений углов атаки а, равной 90 градусам в I и II окружности.
Отличительной особенностью и основным преимуществом предлагаемого устройства является:
- траектории валов с крыльями, при которых осуществляются оптимальные изменения углов атаки крыла;
- рациональное использование затрачиваемой мощности;
- двухопорное расположение элементов увеличивает удельную нагрузку, что позволяет увеличить грузоподъемность или снизить габариты летательных аппаратов;
- отпадает необходимость в рулевом вспомогательном винте;
- и другое, в том числе безопасность эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ И ОПТИМИЗИРОВАННЫМ ПОДЪЕМНЫМ НЕСУЩИМ ВИНТОМ | 2008 |
|
RU2445236C2 |
| ВЫСОКОСКОРОСТНОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С БОЛЬШОЙ ДАЛЬНОСТЬЮ ПОЛЕТА | 2012 |
|
RU2520843C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ | 2008 |
|
RU2473454C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2159726C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2012 |
|
RU2521862C1 |
| ДВИГАТЕЛЬ ДВУХВАЛЬНЫЙ ПОРШНЕВОЙ С ДВУХСТОРОННИМИ РАБОЧИМИ ХОДАМИ | 2011 |
|
RU2478794C2 |
| СПОСОБ СОЗДАНИЯ ТЯГИ И СИЛОВАЯ УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2680214C1 |
| МУСКУЛОЛЕТ (ВАРИАНТЫ) | 2022 |
|
RU2786028C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2619976C2 |
| РЕМЕНЬ КЛИНОВОЙ | 2001 |
|
RU2208726C1 |
Изобретение относится к движителям летательных аппаратов (ЛА) с вертикальными (укороченными) взлетом и посадкой. Устройство содержит один или более подъемно-несущих элементов, например, по бокам фюзеляжа ЛА. Каждый такой элемент включает в себя опорную раму с осью вращения. На оси вращения установлен двухопорный вал в виде крестовины, несущей на себе валы с крыльями (5). Ось вращения и валы с крыльями снабжены зубчатыми шкивами и зубчатыми муфтами сцепления. Шкивы на оси вращения и на осях валов с крыльями охвачены зубчатыми ремнями. Включением или выключением муфт обеспечивается фиксация или вращение валов с крыльями относительно крестовины. При вращении крестовины (с угловой скоростью ω) зубчатая муфта вала крыла (5), проходящего секторы I и II, выключена, а соответствующая ей муфта на оси вращения крестовины включена. В результате крыло (5) получает - через зубчатый ремень, охватывающий соответствующие зубчатые шкивы на оси вращения крестовины и оси вала крыла (5) - противоположное вращение (с угловой скоростью ω1) относительно крестовины. В секторах III и IV, наоборот - муфта вала крыла (5) включена, а соответствующая ей муфта на оси вращения крестовины выключена. Поэтому крыло (5) неподвижно относительно крестовины. Создавая таким образом заданную траекторию крыла (5) при его сложном вращении вокруг двух параллельных осей, осуществляют вертикальный подъем (или посадку) и движение ЛА полной аэродинамической силой, включающей в себя подъемную силу крыльев (5) и силу их лобового сопротивления. Технический результат изобретения состоит в создании достаточно простого конструктивно и безопасного устройства, обеспечивающего подъем (посадку) и движение ЛА. 2 ил.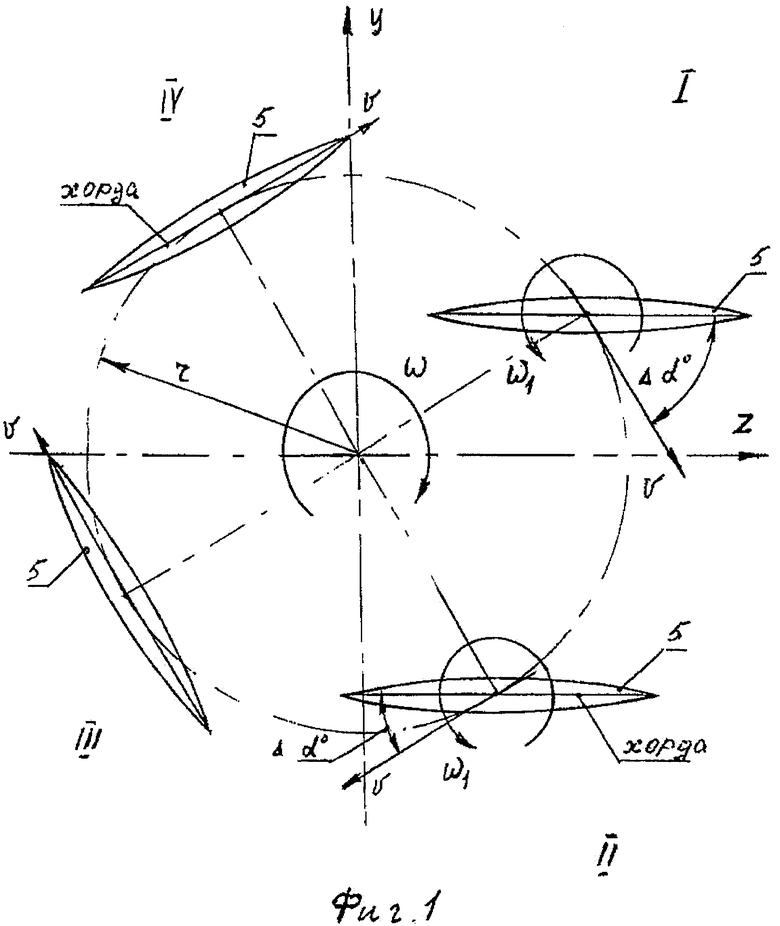
Устройство для вертикального подъема и движения летательных аппаратов, содержащее установленный в верхней части боковых сторон фюзеляжа подъемно-несущий элемент в виде двух спаренных однотипных конструкций, каждая из которых содержит опорную раму с осью вращения, на которой установлен двухопорный вал в виде крестовины с размещенными на нем валами с крыльями, имеющими возможность вращения и фиксации относительно указанного двухопорного вала, отличающееся тем, что на указанной оси вращения размещены зубчатые шкивы и зубчатые муфты сцепления, обеспечивающие фиксацию или вращение данных зубчатых шкивов вместе с указанным двухопорным валом, выполненным в виде крестовины, содержащей зубчатые муфты сцепления для фиксации или вращения указанных валов с крыльями, на каждый из которых посажен зубчатый шкив, охватываемый зубчатым ремнем, охватывающим также указанный зубчатый шкив, размещенный на оси вращения опорной рамы.
| US 5100080 А, 31.03.1992 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1996 |
|
RU2128128C1 |
| US 5000398 A, 19.03.1991 | |||
| ТРАЛ | 2001 |
|
RU2205538C1 |
| БАУЭРС П | |||
| Летательные аппараты нетрадиционных схем | |||
| - М.: Мир, 1991, с.97-228. | |||

