Настоящее изобретение относится к летательному аппарату с большой дальностью полета и высокой поступательной скоростью в крейсерском полете.
Эта передовая концепция винтокрылого летательного аппарата направлена на сочетание разумной стоимости и эффективности вертикального полета обычного вертолета, обладающего такими летными характеристиками как высокая скорость перемещения, обеспечить которую позволяет использование толкающих воздушных винтов и установка современных двигателей.
Для лучшего понимания цели изобретения следует напомнить, что к основной авиационной технике относятся самолеты и винтокрылые летательные аппараты.
Под наименованием винтокрылый летательный аппарат понимаются все аппараты, подъемная сила которых полностью или частично обеспечивается, по меньшей мере, одной вращающейся несущей поверхностью. Вращающаяся несущая поверхность, как правило, содержит, по меньшей мере, один винт большого диаметра и по существу с вертикальной осью, когда аппарат размещен на земле.
В категории винтокрылых летательных аппаратов выделяется много различных типов.
Прежде всего, вертолет, по меньшей мере, один несущий винт которого, приводимый в движение соответствующей силовой установкой, обеспечивает одновременно и подъемную силу, и движение вперед.
Вертолет может быть оснащен двумя обладающими подъемной силой винтами, которые обеспечивают его подъемную силу и его движение вперед. Эти два винта могут быть установлены один за другим вдоль продольной оси упомянутого винтокрылого летательного аппарата: в этом случае говорят о винтокрылом летательном аппарате с двумя расположенными тандемом винтами.
В случае винтокрылого летательного аппарата с двумя расположенными тандемом винтами первый и второй винты, обеспечивающие подъемную силу, являются, как правило, противоположного вращения для того, чтобы момент вращения по рысканию, создаваемый в одном направлении первым винтом, был сильно уменьшен, даже сведен к нулю, моментом вращения по рысканию, создаваемым в другом направлении вторым винтом. Общий эффект момента вращения по рысканию каждого винта позволяет, таким образом, обеспечить устойчивость винтокрылого летательного аппарата относительно его оси рыскания при совершении полета по прямой без ветра.
Следует отметить, что представляется возможным синхронизировать скорость вращения винтов для того, чтобы лопасти этих винтов не задевали друг друга. Таким образом, говорят, что лопасти являются перекрещивающимися, поскольку вращающиеся лопасти первого винта имеют постоянное фазовое смещение по азимуту относительно вращающихся лопастей второго винта.
Известен также автожир, который является винтокрылым летательным аппаратом, винт которого не получает мощности, но обеспечивает подъемную силу, вращаясь в режиме авторотации под действием поступательной скорости аппарата.
Кроме того, комбинированный вертолет является промежуточным винтокрылым летательным аппаратом между вертолетом и автожиром, в котором винт обеспечивает только подъемную силу. Этот винт обычно приводится в движение силовой установкой для выполнения взлета, висения или вертикального полета и посадки наподобие вертолета. Комбинированный вертолет содержит также дополнительную систему обеспечения движения вперед, которая в основном отличается от агрегата винта. В поступательном полете винт обеспечивает также подъемную силу, но исключительно в режиме авторотации, т.е. без передачи мощности на упомянутый винт.
Кроме того, известен конвертоплан, который взлетает и приземляется как вертолет, конвертоплан, летящий в крейсерском полете как автожир.
Кроме того, самолет-вертолет образует другую особую форму представления винтокрылого летательного аппарата. Такое название охватывает все винтокрылые летательные аппараты, которые во время полета меняют конфигурацию: при взлете и посадке - в конфигурации вертолета, при выполнении крейсерского полета - в конфигурации самолета; причем два винта поворачиваются, например, приблизительно на 90º для того, чтобы использоваться в качестве воздушного винта.
Из этих различных форм представления о винтокрылом летательном аппарате вертолет является самой простой с учетом того (как она определена), что, несмотря на то, что максимальная скорость поступательного движения вертолета, которая составляет около 300 км/час, является небольшой и меньше скорости, предусмотренной технически более сложными и более дорогими формами представления типа самолет-вертолет или конвертоплан.
Известна другая инновационная форма представления, называемая для удобства «вертолет-гибрид».
Этот вертолет-гибрид содержит фюзеляж и несущий винт, предназначенный для приведения во вращение лопастей посредством, по меньшей мере, одного двигателя, предпочтительно, двух турбинных двигателей, расположенных сверху фюзеляжа, с одной и другой стороны относительно продольной плоскости симметрии аппарата. Кроме того, вертолет-гибрид содержит крыло и, по меньшей мере, один толкающий воздушный винт.
Кроме того, вертолет-гибрид снабжен встроенной кинематической цепью, которая, помимо двигателя, винта и воздушного винта, содержит механическую систему объединения этих элементов.
С такой конфигурацией данный вертолет-гибрид примечателен тем, что выходные скорости вращения двигателя, винта, воздушного винта и механической системы объединения пропорциональны между собой, соотношение пропорциональности является постоянным независимо от конфигурации полета вертолета-гибрида в нормальных условиях функционирования встроенной кинематической цепи.
Как следствие и предпочтительным образом, винт всегда приводится во вращение двигателем и он всегда создает подъемную силу независимо от конфигурации вертолета-гибрида как при совершении поступательного полета, так и в режиме висения. Вертолет-гибрид не является, таким образом, ни автожиром, ни комбинированным вертолетом, ни конвертопланом, а представляет собой новый тип винтокрылого летательного аппарата.
Данный вертолет-гибрид позволяет выполнять задачи, осуществляемые в течение продолжительного времени в вертикальном полете, крейсерские полеты с высокой скоростью, а также позволяет преодолевать большие расстояния с возможностью осуществления полетов в режиме висения и выполнения вертикальных взлетов.
Из достигнутого уровня техники можно отметить документы FR 2946315 и FR 2929243.
Кроме того, к документам, в которых представлены летательные аппараты, оснащенные двумя винтами, относятся US 2009/0216392 и US 2009/0014580.
В этих документах US 2009/0216392 и US 2009/0014580 представлен летательный аппарат, снабженный двумя расположенными тандемом винтами и оснащенный с одной и другой стороны конструкции управляемым воздушным винтом с обтекателем; причем обтекатель каждого воздушного винта оснащен, кроме того, щитком изменения направления потока из двигателя на выходе.
В документе GB 1120658 представлен летательный аппарат, оснащенный двумя расположенными тандемом винтами и двигателями, которые могут обеспечить тягу, одновременно подавая мощность на выходной вал.
Каждый двигатель является составной частью винтомоторной группы, включая турбину низкого давления, приводящую во вращение воздушный винт. Кроме того, каждый двигатель включает в себя свободную турбину или для приведения в движение двух расположенных тандемом винтов, или для участия в приведении в движение воздушного винта винтомоторной группы посредством расположенных под углом сцеплений.
В документе US 3905565 приводится описание системы пилотирования летательного аппарата, оснащенного двумя расположенными тандемом винтами.
В документе WO 2007/014531 приводится описание летательного аппарата, оснащенного двумя расположенными друг над другом несущими винтами противоположного вращения, а также двумя поворотными воздушными винтами.
В документах US 2006/269414, US 7296767 и US 7628355 приводится описание летательного аппарата, оснащенного двумя расположенными друг над другом винтами противоположного вращения, сопряженными с толкающим воздушным винтом.
Таким образом, технической задачей настоящего изобретения является предложить летательный аппарат с двумя расположенными тандемом винтами с большой дальностью полета и с высокой поступательной скоростью в крейсерском полете.
Согласно изобретению летательный аппарат с большой дальностью полета и с высокой поступательной скоростью содержит:
- фюзеляж, продольно вытянутый в симметричной передне-задней плоскости от задней части к передней части через центральную часть, причем центр тяжести летательного аппарата расположен в центральной части;
- вращающуюся несущую поверхность, оснащенную двумя несущими винтами противоположного вращения, расположенными тандемом вертикально над упомянутым фюзеляжем, причем передний несущий винт удерживается передней частью, а задний несущий винт удерживается задней частью;
- по меньшей мере, один движитель;
- моторную группу для подачи мощности на несущие винты и каждый движитель.
Таким образом, под термином «центральная часть» понимается секция летательного аппарата, включающая в себя центр тяжести; под термином «передняя часть» - секция летательного аппарата, идущая от носа летательного аппарата до соединения с центральной частью и удерживающая передний несущий винт, а под термином «задняя часть» - секция летательного аппарата, идущая от заднего конца летательного аппарата до соединения с центральной частью и удерживающая задний несущий винт.
Кроме того, под термином «моторная группа для обеспечения мощностью несущих винтов и каждого движителя» понимается моторная группа, создающая вращение несущих винтов и создающая тягу посредством движителя.
Кроме того, отмечается, что в термине «вертикаль» ссылка делается на положение рассматриваемых органов, когда летательный аппарат находится на земле.
Кроме того, летательный аппарат содержит средство общего контроля общего шага лопастей несущих винтов, такое как известное специалистам средство контроля.
Таким образом, в частности, на земле два несущих винта расположены вертикально над фюзеляжем.
Данный летательный аппарат примечателен, в частности, тем, что:
- каждый движитель удерживается задней частью;
- летательный аппарат содержит систему объединения, постоянно соединяющую моторную группу с упомянутой вращающейся несущей поверхностью, за исключением случаев отказа и тренировки;
- летательный аппарат содержит дифференциальное средство контроля циклического шага лопастей несущих винтов для контроля по рысканию летательного аппарата;
- и средства запрета каждого движителя.
Такое сочетание позволяет получить летательный аппарат с большой дальностью полета и высокой поступательной скоростью, обладающий оптимальным уровнем безопасности и создающий ограниченное вредное звуковое воздействие.
Действительно, в поступательном полете несущие винты всегда приводятся в движение моторной группой, за исключением случая отказа или имитации случая отказа в рамках проведения тренировочного полета. Однако во время высокоскоростного поступательного полета эти несущие винты участвуют в основном в создании подъемной силы летательного аппарата, при этом движение вперед обеспечивается в основном, по меньшей мере, одним движителем.
Таким образом, понимается, что единственной функцией каждого движителя является участие в обеспечении движения вперед летательного аппарата, а не участие в контроле по рысканию этого летательного аппарата. Кроме того, отмечается, что функцией средства запрета является остановка каждого движителя по запросу, например, пилота.
Каждый движитель не выполняет, таким образом, критическую функцию и может быть легко оптимизирован в той мере, что функцией каждого движителя будет только обеспечение продвижения вперед летательного аппарата на некоторых этапах полета. В связи с этим понятно, что легче осуществить доводку движителя, предназначенного для обеспечения движения вперед, чем движителя, который должен, например, участвовать в контроле по рысканию летательного аппарата.
Например, во время полета в режиме висения средство запрета может запретить функционирование каждого движителя, причем несущих винтов достаточно для контроля по рысканию летательного аппарата.
Кроме того, средство запрета может запрещать функционирование каждого движителя на земле, причем нет необходимости в каком-либо движителе для маневрирования на земле. Из этого вытекают значительные преимущества.
По сути, понятно, что вредные звуковые воздействия, создаваемые на земле летательным аппаратом, сведены к минимуму, никакой движитель не производит на земле вредного шума, когда он выключен.
Кроме того, никакой движитель не представляет опасности для людей, которые движутся рядом с летательным аппаратом для осуществления, например, операций по загрузке/разгрузке летательного аппарата.
Данная отличительная особенность усилена за счет расположения каждого движителя в задней части летательного аппарата. Такое расположение предоставляет возможность использовать лебедку вертикально над боковой дверью и размещенную, например, в центральной части.
Таким образом, средства запрета могут содержать:
- первое устройство для сведения к минимуму мощности, потребляемой движителем, такое как устройство, задачей которого является регулировка угла наклона лопастей движителя с воздушным винтом на нулевой шаг во время полета в режиме висения, в частности;
- второе устройство, позволяющее остановить движитель, в частности на земле, без остановки несущего винта.
И наконец, следует отметить, что наличие двух несущих винтов позволяет довести до максимума грузоподъемность летательного аппарата и облегчить выполнение полета в режиме авторотации.
Таким образом, совокупность используемых средств предоставляет летательному аппарату, в частности, возможность выполнять задачи в открытом море; причем летательный аппарат может, с одной стороны, пролетать большое расстояние в течение разумного времени, а с другой стороны, садиться на ограниченной площадке, оказывая минимальное вредное воздействие на окружающую среду.
Архитектура летательного аппарата является к тому же относительно простой и надежной с точки зрения безопасности.
Данный летательный аппарат может, кроме того, обладать одним или множеством нижеследующих дополнительных признаков.
Например, моторная группа может содержать винтомоторный орган, включающий в себя тепловой двигатель и движитель.
Например, тепловой двигатель может выбрасывать газы, которые, с одной стороны, приводят в движение вал, сопряженный с системой объединения, а с другой стороны, выбрасываются движителем для участия в обеспечении движения вперед.
Согласно другому варианту тепловой двигатель может выбрасывать газы, которые приводят в движение вал, с одной стороны, сопряженный с системой объединения, а с другой стороны, сопряженный с движителем с воздушным винтом.
Согласно другому примеру тепловой двигатель может содержать рабочий вал, приводящий в действие, с одной стороны, систему объединения, а с другой стороны, воздушный винт этого винтомоторного органа, причем воздушный винт представляет собой движитель летательного аппарата.
Кроме того, согласно первой предпочтительной реализации летательный аппарат содержит, по меньшей мере, два движителя, поперечно расположенных с одной и другой стороны упомянутого фюзеляжа.
Согласно терминологии, заимствованной из области мореплавания, летательный аппарат может, таким образом, содержать движитель «левого борта», закрепленный на стороне «левого борта» задней части, и движитель «правого борта», закрепленный на стороне «правого борта» задней части.
Согласно второй реализации, сравнимой с первой реализацией, летательный аппарат может содержать движитель, расположенный в симметричной передне-задней плоскости летательного аппарата.
Кроме того, по меньшей мере, один движитель может являться органом с воздушным винтом.
Этот орган с воздушным винтом может иметь обтекатель для повышения, в частности, безопасности людей на земле.
Согласно другому аспекту летательный аппарат может содержать средство регулирования скорости вращения несущих винтов для поддержания скорости вращения каждого несущего винта, равной первой скорости вращения, до первой воздушной скорости на траектории упомянутого летательного аппарата, затем постепенного снижения данной скорости вращения по закону, например по линейному закону, в зависимости от воздушной скорости упомянутого вертолета-гибрида.
Необходимо отметить, что возможность достижения больших воздушных скоростей летательным аппаратом на траектории обязывает уменьшить скорость истечения воздуха на конце набегающих лопастей несущих винтов и, таким образом, уменьшить скорость вращения несущих винтов для исключения какой-либо опасности появления феноменов сжатия упомянутого потока воздуха.
Вследствие этого другой интерес к изобретению обусловлен тем, что скорость вращения каждого несущего винта равна первой скорости вращения Ω1 до первой воздушной скорости на траектории V1, затем уменьшена предпочтительно постепенно по линейному закону в зависимости от поступательной скорости летательного аппарата.
На практике скорость вращения несущих винтов постепенно снижается до второй скорости вращения Ω2, соответствующей второй воздушной скорости на траектории V2, которая является максимальной скоростью летательного аппарата.
Кроме того, центральная часть может содержать неподвижную несущую поверхность, например, напротив центра тяжести.
Таким образом, летательный аппарат может содержать крыло, обеспечивающее дополнительную подъемную силу во время крейсерского полета для компенсации возможного падения подъемной силы несущих винтов, которое может быть вызвано снижением их скоростей вращения Ω1, Ω2.
Крыло может состоять из двух полукрыльев, причем каждое полукрыло проходит с одной и другой стороны фюзеляжа. Эти полукрылья могут образовывать верхнерасположенное крыло, содержащее, возможно, угол поперечного V. Однако они также могут образовывать или низкорасположенное крыло, или среднерасположенное крыло.
Следует также отметить, что, как правило, сложно размещать неподвижную несущую поверхность под несущим винтом, неподвижная несущая поверхность способна создать отрицательную подъемную силу, в частности, во время полета в режиме висения.
Однако размещая неподвижную несущую поверхность в центральной части и, таким образом, между передним и задним несущими винтами, отрицательная подъемная сила, создаваемая неподвижной несущей поверхностью, сведена к минимуму.
Кроме того, отмечается, что крыло может содержать средства контроля летательного аппарата типа руля и/или щитка, например.
Представляется возможным использовать эти средства контроля для контроля угла тангажа или крена летательного аппарата на большой скорости, причем несущие винты участвуют, таким образом, исключительно в создании подъемной силы летательного аппарата. Средства контроля позволяют также контролировать распределение подъемной силы между крылом и вращающейся несущей поверхностью и уменьшить взаимодействие между этой вращающейся несущей поверхностью и крылом.
Согласно другому аспекту, задний несущий винт возможно нависает над передним несущим винтом. Таким образом, задний несущий винт движется в первой плоскости подъемной силы, нависающей над второй плоскостью подъемной силы, в которой движется передний несущий винт.
Представляется также возможным предусмотреть значительный клиренс между каждым движителем и землей для максимального обеспечения безопасности людей, движущихся рядом с летательным аппаратом, в частности на платформе.
Изобретение и его преимущества станут детально видны из нижеследующего описания с примерами реализации, приведенными в качестве иллюстрации, со ссылкой на прилагаемые фигуры чертежа, на которых:
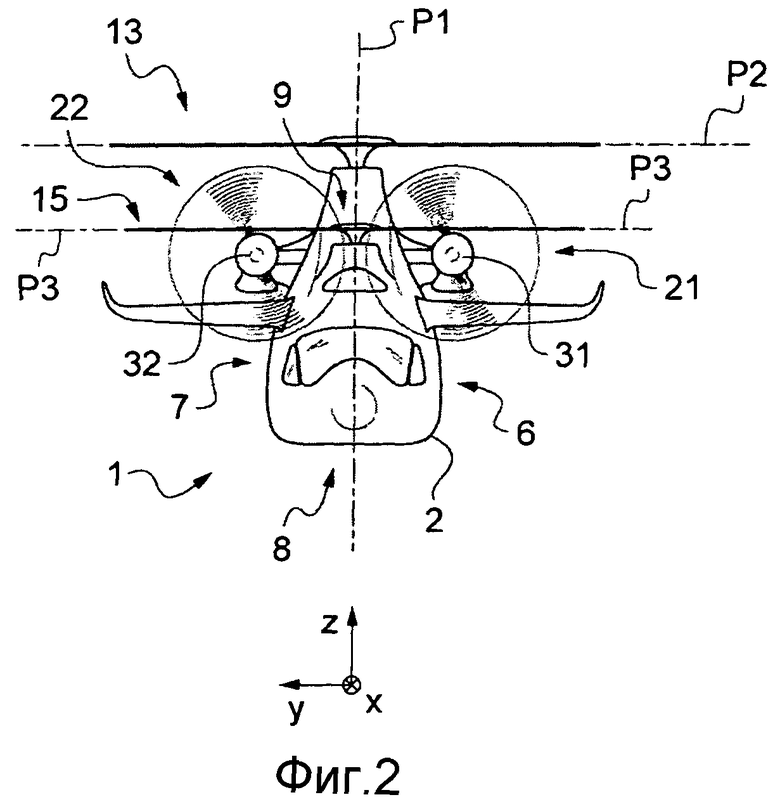
- фиг.1 представляет собой вид сверху летательного аппарата;
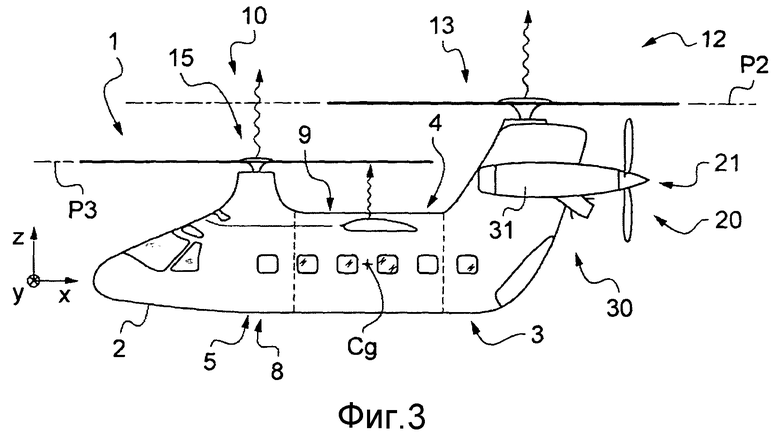
- фиг.2 представляет собой вид спереди летательного аппарата;
- фиг.3 представляет собой вид сбоку летательного аппарата.
Отмечаются три направления X, Y и Z, которые ортогонально расположены относительно друг друга и изображены на фиг.1-3.
Первое направление X называется продольным. Термин «продольное» относится к любому направлению, параллельному первому направлению X.
Второе направление Y называется поперечным. Термин «поперечное» относится к любому направлению, параллельному второму направлению Y.
И наконец, третье направление Z называется вертикальным. Выражение «вертикальное» относится к любому направлению, параллельному третьему направлению Z.
На фиг.1 изображен летательный аппарат 1 с большой дальностью полета, содержащий фюзеляж 2.
Фюзеляж 2 продольно вытянут в симметричной передне-задней плоскости P1 от задней части 3 к передней части 5 через центральную часть 4, в которой расположен центр тяжести Cg летательного аппарата.
Как это показано на фиг.2, фюзеляж 2 вытянут в поперечном направлении от первой стороны 6, называемой «левый борт» для удобства, ко второй стороне 7, называемой «правый борт».
Как это показано на фиг.3, фюзеляж 2 вытянут в вертикальном направлении от нижнего участка 8 к верхнему участку 9 вертикально над нижним участком 8.
Кроме того, как это показано на фиг.1, летательный аппарат 1 снабжен вращающейся несущей поверхностью 10.
Вращающаяся несущая поверхность 10, таким образом, снабжена двумя несущими винтами 12 противоположного вращения. Следовательно, эта вращающаяся несущая поверхность может быть названа «системой вращающейся несущей поверхности», поскольку она содержит два несущих винта 12.
Если быть более точным, то вращающаяся несущая поверхность 10 включает в себя: задний несущий винт 13, удерживаемый задней частью 3; передний несущий винт 15, удерживаемый передней частью 5; причем задний несущий винт 13 и передний несущий винт 15 по существу расположены вертикально над верхним участком 9 фюзеляжа 2.
Кроме того, обтекателям задней части хорошо придана удобообтекаемая форма для достижения эффекта устойчивости по рысканию.
Кроме того, как это показано на фиг.2, задний несущий винт 13 движется в первой плоскости подъемной силы P2, нависая над второй плоскостью подъемной силы P3, в которой движется передний несущий винт 15. Следует отметить, что под «плоскостью подъемной силы» понимается плоскость, содержащая лопасти соответствующего несущего винта 13, когда взмахи этих лопастей являются нулевыми и отсутствует циклический шаг.
Как это показано на фиг.1, летательный аппарат 1 содержит, в частности, дифференциальное средство контроля 50 циклического шага лопастей несущих винтов для контроля летательного аппарата по рысканию. Это дифференциальное средство контроля может включать в себя рычаг ножного управления или аналогичное устройство, воздействующее обычными средствами на циклический шаг лопастей.
Кроме того, на задней части 4 летательного аппарата удерживается, по меньшей мере, один движитель 20, участвующий в обеспечении движения вперед летательного аппарата 1.
Согласно предпочтительной реализации, представленной на фиг.1, летательный аппарат содержит два движителя 21, 22, расположенные поперечно с одной и другой стороны упомянутого фюзеляжа 2. Таким образом, первый движитель 21 находится с первой стороны 6 летательного аппарата, в то время как второй движитель 22 - со второй стороны 7.
Альтернативно или дополнительно летательный аппарат может содержать движитель 23, расположенный в симметричной передне-задней плоскости P1 летательного аппарата, показанной пунктирными линиями только на фиг.1.
По меньшей мере, один движитель 20 может, кроме того, быть органом с воздушным винтом, возможно, с обтекателем.
Кроме того, летательный аппарат содержит моторную группу 30 для приведения в движение несущих винтов 12 и обеспечения требуемой мощностью движителей.
Эта моторная группа 30 может включать в себя тепловые двигатели 31, 32, приводящие в действие систему объединения 40, приводящую в движение несущие винты. Система объединения 40, таким образом, постоянно соединяет упомянутую моторную группу 30 с упомянутой вращающейся несущей поверхностью 10, т.е. за исключением случаев случайного или имитируемого отказа.
Эта система объединения 40 может содержать механическую конструкцию, снабженную передним редуктором, приводящим в движение вал переднего несущего винта, задним редуктором, приводящим в движение вал заднего несущего винта, и, по меньшей мере, одним валом, соединяющим передний редуктор с задним редуктором, а также механическими цепями 103, 104, соединяющими эту совокупность с каждым двигателем моторной группы 30.
Моторная группа также обеспечивает необходимой мощностью каждый движитель.
Согласно представленному примеру система объединения 40 приводит в действие движители 21, 22 типа органов с воздушным винтом посредством механических соединений 101, 102.
Следует отметить, что согласно альтернативному варианту моторная группа непосредственно взаимодействует с движителями. Однако представляется возможным рассмотреть винтомоторный орган, выполняющий одновременно и функцию двигателя, приводящего в действие систему объединения, и функцию движителя.
Независимо от варианта реализации летательный аппарат содержит средство запрета 60 каждого движителя для остановки движителя на земле или в воздухе без остановки вращения несущих винтов.
Например, средство запрета 60 включает в себя сцепление 62, 63 между каждым движителем и моторной группой, а также средство управления 61, контролирующее сцепления 62, 63 для отсоединения движителей от моторной группы.
Кроме того, сцепление дополнено средством блокировки механического соединения для недопущения проскальзывания сцепления.
Средство запрета также может содержать средство регулирования угла атаки лопастей движителя с воздушным винтом, например, для регулирования этого угла атаки на нулевой шаг для уменьшения потребления энергии воздушным винтом.
Таким образом, средство запрета может содержать:
- первое устройство для сведения к минимуму мощности, потребляемой движителем и/или
- второе устройство, позволяющее остановить движитель, в частности на земле, без остановки вращающейся несущей поверхности.
Согласно другому аспекту летательный аппарат содержит средство регулирования 70 скорости вращения Ω упомянутых несущих винтов для поддержания скорости вращения Ω каждого несущего винта, равной первой скорости вращения Ω1 до первой воздушной скорости на траектории V1 летательного аппарата 1, затем для постепенного снижения этой скорости вращения Ω по предварительно определенному линейному закону в зависимости от воздушной скорости на траектории упомянутого вертолета-гибрида.
Средство регулирования может содержать блок обработки, способный управлять органами контроля шага лопастей несущих винтов.
Кроме того, летательный аппарат 1 может содержать неподвижную несущую поверхность 80, расположенную в центральной части 4. Эта неподвижная несущая поверхность может включать в себя крыло, снабженное средствами контроля 83, взаимодействующими со средством пилотирования 84, управляемым, например, летчиком.
Естественно, настоящее изобретение, что касается его воплощения, подвержено многочисленным изменениям. Хотя было приведено описание многочисленных вариантов реализации, вполне понятно, что невозможно определить исчерпывающим образом все возможные варианты. Безусловно, можно предусмотреть замену описанного средства эквивалентным средством, не выходя за рамки настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ СО ВСПОМОГАТЕЛЬНЫМИ ВОЗДУШНЫМИ ВИНТАМИ ДЛЯ УПРАВЛЕНИЯ ПОЛЕТОМ | 2021 |
|
RU2762441C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| СПОСОБ ОПТИМИЗАЦИИ ШУМА, ПРОИЗВОДИМОГО ВСПОМОГАТЕЛЬНЫМ ВИНТОМ, И ХАРАКТЕРИСТИК ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА, И ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2601966C2 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ СООСНЫЙ ЭЛЕКТРОВЕРТОЛЕТ | 2021 |
|
RU2753444C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ | 2008 |
|
RU2473454C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ И ОПТИМИЗИРОВАННЫМ ПОДЪЕМНЫМ НЕСУЩИМ ВИНТОМ | 2008 |
|
RU2445236C2 |
| ВИНТОКРЫЛ | 2012 |
|
RU2500578C1 |
Изобретение относится к области авиации, в частности к конструкциям гибридных летательных аппаратов. Летательный аппарат (1) содержит фюзеляж (2), вращающуюся несущую поверхность (10), оснащенную двумя несущими винтами (12) противоположного вращения, расположенными тандемом над упомянутым фюзеляжем (2), по меньшей мере, один движитель (20) и моторную группу (30). Каждый движитель (20) удерживается задней частью (3) фюзеляжа. Летательный аппарат (1) содержит систему объединения (40), постоянно соединяющую моторную группу (30) с вращающейся несущей поверхностью (10), за исключением случаев отказа и тренировки. Летательный аппарат (1) содержит дифференциальное средство контроля (50) циклического шага лопастей несущих винтов (12) для контроля по рысканию летательного аппарата (1) и средства запрета (60) каждого движителя (20). Моторная группа содержит винтомоторный орган, включающий в себя тепловой двигатель и движитель. Средство регулирования (70) скорости вращения (Ω) несущих винтов поддерживает скорость вращения каждого несущего винта равной (Ω1) до первой воздушной скорости (V1) летательного аппарата (1) и далее снижает эту скорость вращения (Ω) по линейному закону в зависимости от воздушной скорости летательного аппарата. Достигается увеличение скорости и дальности полета. 9 з.п. ф-лы, 3 ил.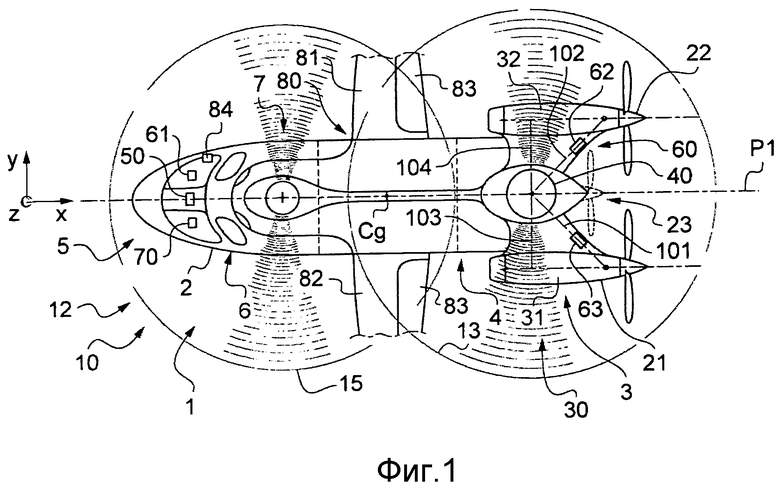
1. Летательный аппарат (1) с большой дальностью полета и с высокой поступательной скоростью, содержащий:
- фюзеляж (2), продольно вытянутый в передне-задней плоскости (Р1) от задней части (3) к передней части (5) через центральную часть (4), причем центр тяжести (Cg) летательного аппарата (1) расположен в упомянутой центральной части (4);
- вращающуюся несущую поверхность (10), оснащенную двумя несущими винтами (12) противоположного вращения, расположенными тандемом вертикально над упомянутым фюзеляжем (2), причем передний несущий винт (15) удерживается упомянутой передней частью (5), а задний несущий винт (13) удерживается упомянутой задней частью (3);
- по меньшей мере, один движитель (20);
- моторную группу (30) для подачи мощности на несущие винты (12) и каждый движитель (20),
отличающийся тем, что каждый движитель (20) удерживается упомянутой задней частью (3), а упомянутый летательный аппарат (1) содержит систему объединения (40), постоянно соединяющую упомянутую моторную группу (30) с упомянутой вращающейся несущей поверхностью (10), за исключением случаев отказа и тренировки; причем летательный аппарат (1) содержит дифференциальное средство контроля (50) циклического шага лопастей упомянутых несущих винтов (12) для контроля летательного аппарата (1) по рысканию и средство запрета (60) каждого движителя (20).
2. Летательный аппарат по п.1, отличающийся тем, что упомянутая моторная группа (30) содержит винтомоторный орган, включающий в себя тепловой двигатель и движитель.
3. Летательный аппарат по п.1, отличающийся тем, что он содержит, по меньшей мере, два движителя (21, 22), расположенные поперечно с одной и другой стороны упомянутого фюзеляжа (2).
4. Летательный аппарат по п.1, отличающийся тем, что он содержит движитель, расположенный в симметричной задне-передней плоскости (Р1) летательного аппарата.
5. Летательный аппарат по п.1, отличающийся тем, что, по меньшей мере, один движитель (20) является органом (21, 22) с воздушным винтом.
6. Летательный аппарат по п.5, отличающийся тем, что упомянутый орган с воздушным винтом выполнен с обтекателем.
7. Летательный аппарат по п.1, отличающийся тем, что он содержит средство регулирования (70) скорости вращения (Ω) упомянутых несущих винтов для поддержания скорости вращения (Ω) каждого несущего винта, равной первой скорости вращения (Ω1), до первой воздушной скорости на траектории (V1) упомянутого летательного аппарата (1), затем для постепенного снижения этой скорости вращения (Ω) по линейному закону в зависимости от воздушной скорости на траектории упомянутого вертолета-гибрида.
8. Летательный аппарат по п.1, отличающийся тем, что упомянутая центральная часть (4) содержит неподвижную несущую поверхность (80).
9. Летательный аппарат по п.8, отличающийся тем, что упомянутая неподвижная несущая поверхность (80) содержит средства контроля (83) летательного аппарата.
10. Летательный аппарат по любому из пп.1-9, отличающийся тем, что упомянутый задний несущий винт (13) движется в первой плоскости подъемный силы (Р2), нависающей над второй плоскостью подъемной силы (Р3), в которой движется передний несущий винт (15).
| GB 1120658 A, 24.07.1968 | |||
| FR 2946315 A1, 10.12.2010 | |||
| Способ получения хлебобулочных изделий и устройство для его осуществления | 1990 |
|
SU1799543A1 |
| RU 2009148021/11 А, 27.06.2011 | |||

