Изобретение «Летательный аппарат вертикального взлета и посадки» относится к области авиации, в частности к летательным аппаратам вертикального взлета и посадки.
1. Летательный аппарат вертикального взлета и посадки состоит из устройства 1 для движения крыльев 43, кабины 2, двигателей 3, вентилятора 4, отличается тем, что устройство 1 для движения крыльев состоит из четырех ферм, которые образованы из направляющих 19 для направления движения подшипников труб крыльев, уголков 12 и полосок 22; крыльев 43, которые имеют возможность создавать воздушный поток; зубчатых ремней 10, к которым крепятся крылья 43; шкивов 9; двух валов 11, на которых посажены шкивы 9; рычагов 20 управления углами атаки крыльев 43; направляющих 29 подшипников рычагов 20, приваренных к правой и левой фермам; двух ведомых звездочек 7 и листа ограждения (см фиг.1 - фиг.12).
2. Летательный аппарат вертикального взлета и посадки по п.1 отличается тем, что крылья 43 устройства 1 для движения крыльев имеют возможность двигаться на прямолинейных участках вверху и внизу, при этом угол атаки крыла 43 не изменяется при движении на прямолинейных участках вверху и внизу (см. фиг.1 - фиг.12).
3. Летательный аппарат вертикального взлета и посадки по п.1 отличается тем, что крылья 43 устройства 1 для движения крыльев имеют возможность изменять угол атаки при движении по полуокружности (см. фиг.1, фиг.2).
4. Летательный аппарат вертикального взлета и посадки по п.1 отличается тем, что имеет возможность при изменении угла наклона устройства 1 для движения крыльев относительно кабины 2 изменять направление потока воздуха (см. фиг.1 - фиг.11).
Уровень техники
Существуют летательные аппараты вертикального взлета, но в них применен принцип несущего винта. В частности, «Автожир с вертикальным взлетом и вертикальной посадкой» [Б.А. Половинкин, патент РФ №2463213 от 21.04.2008 г. на изобретение «Автожир с вертикальным взлетом и вертикальной посадкой», RU 2463213 по заявке №2010146347], также патент на полезную модель «Летательный аппарат» [А.Д. Гиргидов, Р.А. Гиргидов, патент РФ №121488 от 13.06.2012 г. на изобретение «Летательный аппарат», RU 121488 по заявке №2012124445]. В данном изобретении у «Летательного аппарата вертикального взлета и посадки» надежность выше, чем у вертолета, автожира с вертикальным взлетом и вертикальной посадкой и летательного аппарата [А.Д. Гиргидов, Р.А. Гиргидов патент РФ №121488 от 13.06.2012 г. на изобретение «Летательный аппарат», RU 121488 по заявке №2012124445], так как у вертолета и автожира с вертикальным взлетом и посадкой и летательного аппарата опора конструкции происходит на подшипник несущего винта, а у летательного аппарата вертикального взлета и посадки множество подшипников на крыльях.
Раскрытие изобретения
Летательный аппарат вертикального взлета и посадки является летательным аппаратом тяжелее воздуха аэродинамического принципа действия. Подъемная сила и сила тяги, необходимые для поступательного движения, создаются при помощи движущихся крыльев.
Крылья движутся с помощью зубчатых ремней, к которым они и крепятся. Движущиеся крылья создают подъемную силу и поэтому, летательный аппарат вертикального взлета и посадки может подниматься прямо со стоянки.
Взлетать и висеть в воздухе, снижаться и совершать посадку летательный аппарат вертикального взлета и посадки может в любом месте, ему не требуется взлетная полоса.
Так как крылья имеют жесткую защиту, то летательный аппарат вертикального взлета и посадки может спокойно садиться в тайге на поляну, потому что ему не опасны ветки деревьев.
Летательный аппарат вертикального взлета и посадки предназначен для перевозки людей и грузов.
Увеличивая установку и количество секций можно получить большую подъемную силу при небольшом увеличении мощности двигателей.
Краткое описание чертежей
На фиг.1 показан общий вид летательного аппарата вертикального взлета и посадки в двух проекциях. Летательный аппарат вертикального взлета и посадки состоит из устройства для движения крыльев 1, кабины 2, газотурбинных двигателей 3, вентилятора 4 (с изменяющимся углом установки лопаток). От ведущей звездочки 6 цепная передача к звездочкам 7. Червячный редуктор 8 предназначен для изменения угла наклона устройства для движения крыльев 1 относительно кабины 2. Алюминиевые трубы 46 предназначены для крепления вентилятора 4. Опорами концов вала 39 являются кронштейны 41. Момент вращения передается от газотурбинных двигателей 3 через редукторы 5 на стальной вал 39. Редуктор 35 служит для отбора мощности с вала 39 на вращение вентилятора 4.
На фиг.2 показана часть устройства для движения крыльев. Крылья 43 крепятся к зубчатым ремням 10. Зубчатые ремни 10 приводятся в движение с помощью шкивов 9. Показаны направляющие 19 подшипников.
На фиг.3 показана схема изменения угла атаки (угол атаки примерно 20-23 градуса) крыльев при движении крыла из верхнего положения в нижнее по полуокружности. Крыло, двигаясь в направляющих 19, тянет за собой подшипник рычага 20 по направляющей 29. Подшипник, который движется по направляющей 29, из положения 1′ перемещается в положение 2′. В это время передний подшипник рычага из положения 1″ переходит в положение 2″ и захватывается закругленной частью нижней направляющей 29, а задний подшипник рычага 20 освобождается. При дальнейшем движении крыла задний подшипник полностью освобождается и угол атаки крыла удерживает передний подшипник, положение 3″. Так происходит при движении крыла сверху вниз.
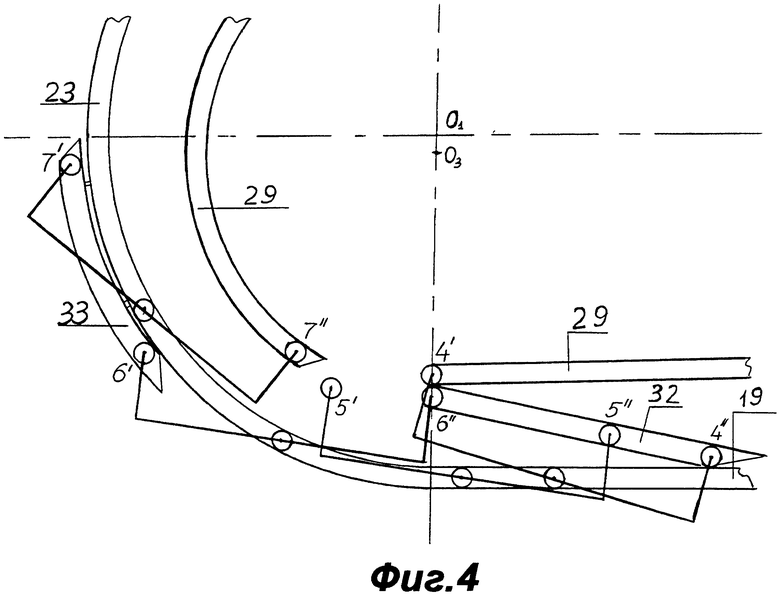
На фиг.4 показано, как происходит изменение угла атаки крыла при его движении снизу вверх. Нижняя направляющая 29 подшипника рычага 20 на расстоянии 1,5 м до центральной оси окружности отклоняется от горизонтального положения в сторону направляющей 19 и подходит к ней на расстояние, равное 0,25 м. Нормальное расстояние между направляющими 19 и 29 равно 0,27 м. Передний подшипник рычага подходит к центральной оси окружности, положение 4′. В это время происходит захват дополнительной направляющей 32 заднего подшипника рычага, положение 4″. Крыло, двигаясь по направляющей 19, тянет за собой задний подшипник рычага, положение 5″, в это время передний подшипник рычага, положение 5′, проходит разрыв между направляющими. При достижении положения 6″ задним подшипником рычага происходит захват переднего подшипника рычага дополнительной направляющей 33, положение 6′. Когда передний подшипник рычага займет положение 7′, произойдет захват заднего подшипника рычага закруглением верхней направляющей 29, положение 7″. При дальнейшем движении крыла, передний подшипник освобождается.
На фиг.5 показана труба 14 в разрезе. Бронзовые вставки 17 служат для усиления трубы 14. Шарики 18 в вставках 17 служат для уменьшения торможения трубы 14 при смещении в осевом направлении. Показана нижняя часть 25 кронштейна, который закреплен на ремне 10. Показаны крайние левая и правая нервюры 15 крыла. Показаны рычаг 20 изменения угла атаки крыла и кольцо 31 для крепления на трубе. Показана пластина 27 рычага 20, в которой крепится ось 28 подшипника, который находится в направляющей 29. Показан кронштейн 30, который удерживает направляющую 29.
Кронштейн 30 приварен к направляющей 19.
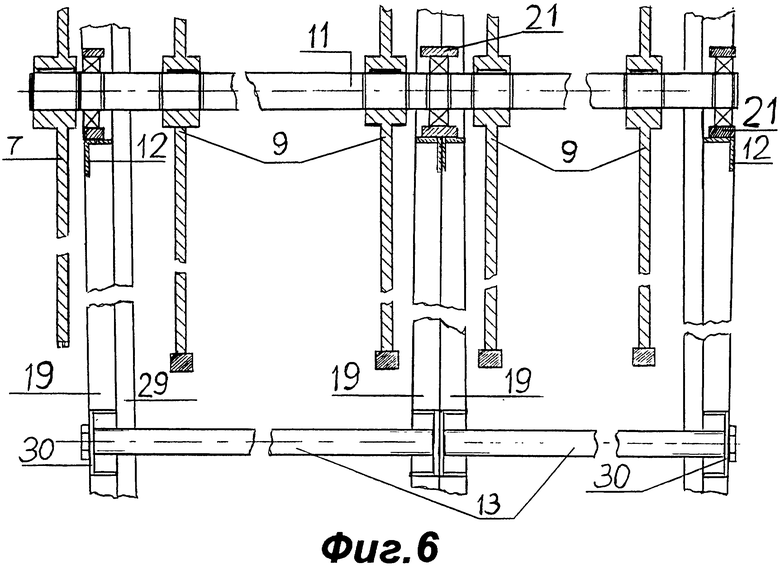
На фиг.6 показана передняя часть устройства для движения крыльев: титановый вал 11, четыре ведущих шкива 9, звездочка 7, направляющие 19, 29, посадочные кольца 21 для подшипников, уголки 12 (к ним приварены посадочные кольца 21), кронштейны 30, распорные трубы 13.
На фиг.7 показан кронштейн, состоящий из нижней части 25 кронштейна и верхней части 45 кронштейна. Показан зажим 44 для крепления нижней части 25 кронштейна к ремню 10. Внутри ремня 10 показан стальной трос 34.
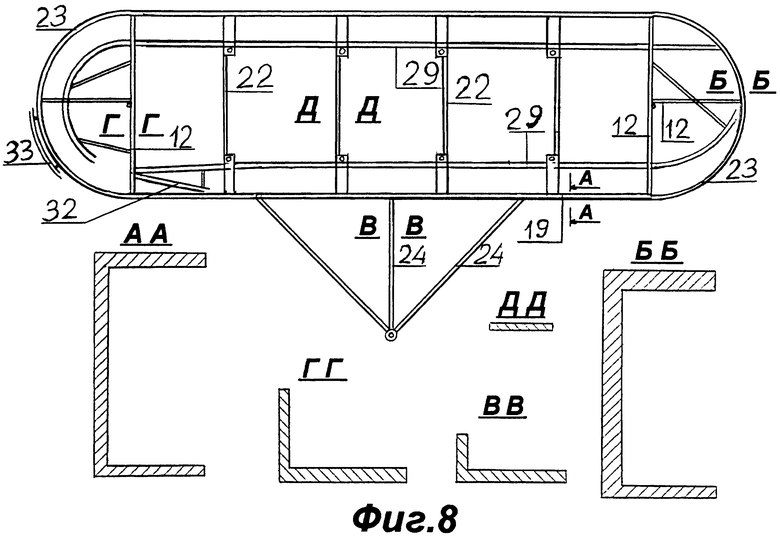
На фиг.8 показана левая ферма, состоящая из: направляющих 19, 29, 23, уголков 12, кронштейнов 30, полосок 22, уголков 24, кольца 26.
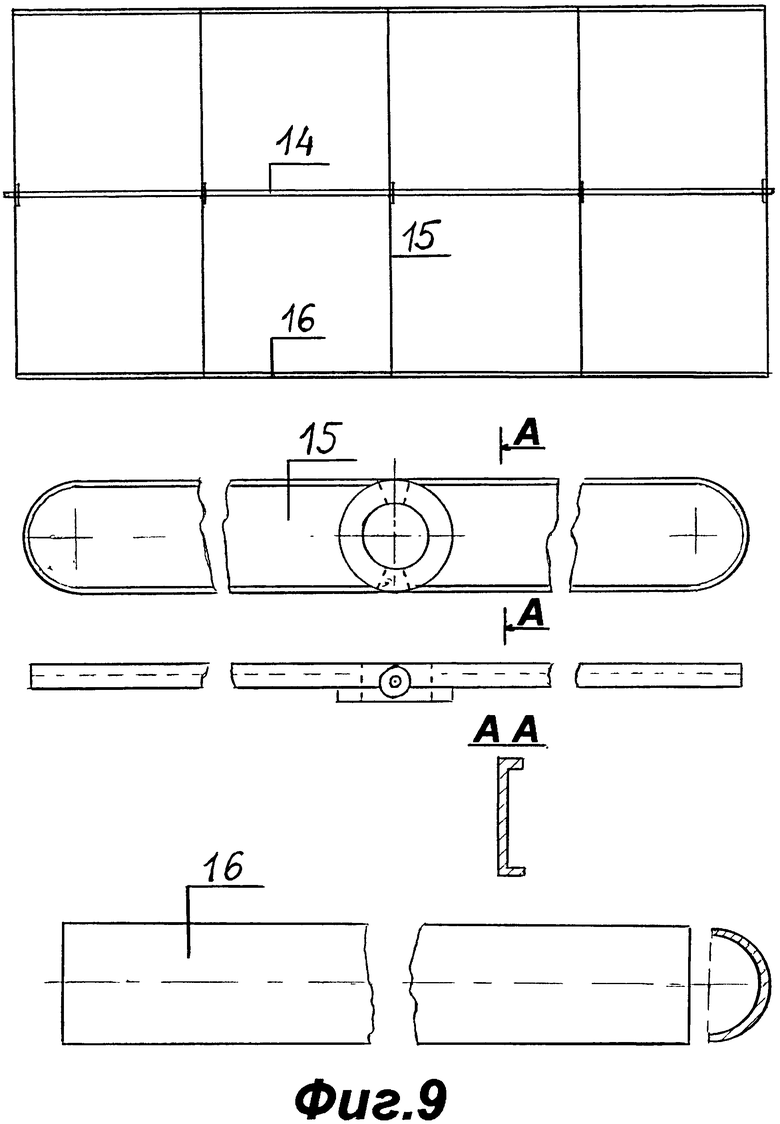
На фиг.9 показано устройство крыла: центральная труба 14, к которой крепятся пять нервюр 15 и два лонжерона 16. Показана нервюра 15 и ее разрез. Показан лонжерон 16 и его вид сбоку.
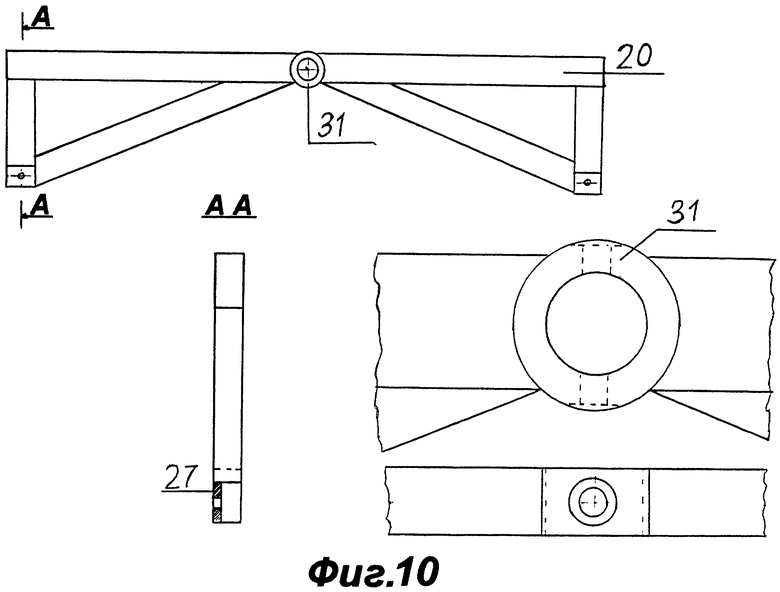
На фиг.10 показан рычаг 20 изменения угла атаки крыла. Показана пластина 27, кольцо 31.
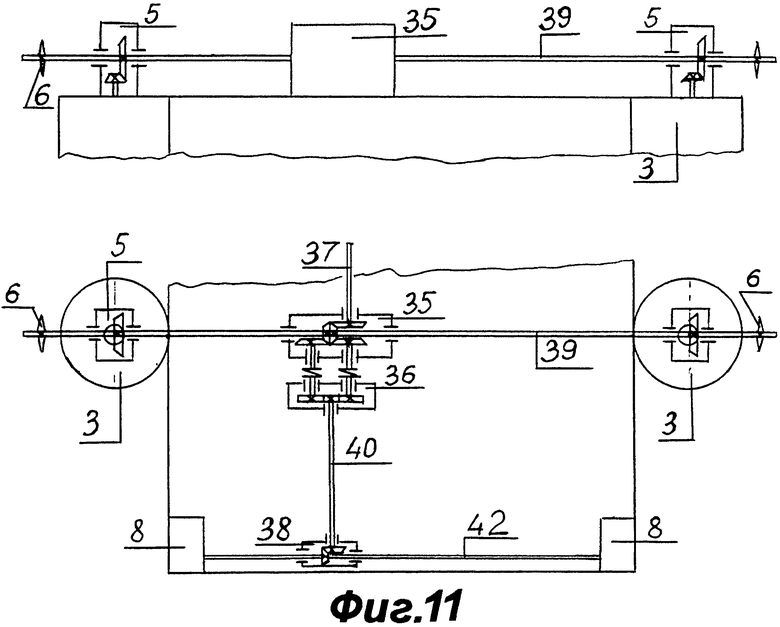
На фиг.11 показаны редуктора 5 газотурбинных двигателей 3. Показан стальной вал 39, на котором находятся ведущие звездочки 6. Через редуктор 35 отбора мощности вращающий момент передается на вентилятор с помощью вала 37. С редуктора 35 с помощью двух валов и управляемых муфт вращение передается на редуктор 36, далее через вал 40 вращение передается на редуктор 38, а с него - на червячные редуктора 8, которые служат для управления углом наклона устройства для движения крыльев.
На фиг.12 показан шкив 9 и ведомая звездочка 7.
Осуществление изобретения
Летательный аппарат вертикального взлета и посадки состоит из устройства для движения крыльев 1, кабины 2, газотурбинных двигателей 3, вентилятора (с изменяющимся углом установки лопаток) 4. Фиг.1.
Крутящий момент с двигателей 3 через ведущую звездочку 6 передается на ведомую звездочку 7.
В передней части устройства ведомая звездочка посажена на вал с правой стороны, а в задней части устройства ведомая звездочка посажена на вал с левой стороны. Это сделано для того, чтобы были равномерные растягивающие силы на верхние и нижние части ремней.
Чертеж устройства для движения крыльев показан на фиг.2.
Крылья 43 крепятся к зубчатым ремням 10. Движение ремней осуществляется с помощью шкивов 9, которые посажены на титановый вал 11. См. фиг.6.
Вал из титанового сплава. Диаметр 0,04 м, длина 4,442 м.
Опорами вала служат три подшипника 180208. Подшипники на валу фиксируются с помощью пружинных упорных колец.
Посадочные кольца 21 подшипников привариваются к уголкам 12 ферм. См. фиг.6, фиг.8.
Посадочное кольцо в средней части приварено к сдвоенному уголку, т.к. в средине сварены две фермы вместе.
Подшипник в средней части вала 11 фиксируется в посадочном кольце 21 пружинными упорными внутренними кольцами, а подшипники на концах вала располагаются в посадочных кольцах свободно. Это сделано для того, чтобы не было защемления подшипников в результате теплового расширения вала 11.
От правого конца титанового вала 11 на расстоянии 2,204 м находится центр среднего подшипника. От центра среднего подшипника на расстоянии 0,055 м до центра ступиц справа и слева посажены на шпонках два шкива 9 из алюминиевого сплава. Между центрами первых шкивов и вторых шкивов расстояние 2,045 м.
От центров крайних шкивов до центров крайних подшипников расстояние 0,09 м. На левом конце титанового вала 11 посажена на шпонке ведомая звездочка 7.
Посадочные кольца 21 изготовлены из титанового сплава. Внутренний диаметр 0,08 м, наружный диаметр 0,1 м. Высота среднего кольца 0,04 м, наружных колец по 0,025 м. Звездочка 7 изготовлена из титанового сплава.
Шкивы 9 из алюминиевого сплава. Диаметр по выступам 2 м, диаметр ступицы 0,08 м, длина ступицы 0,04 м, восемь спиц диаметром 0,022 м, обод шириной 0,031 м, высота 0,02 м. См. фиг.12.
Ферма сделана из направляющих 19, по которым движутся подшипники труб 14 крыльев, полуколец 23, уголков 12, 24, полосок 22, кронштейнов 30 и кольца 26, к которому крепится кронштейн кабины. См. фиг.8.
Направляющие 19, в которых движутся подшипники трубы 14 крыла, выполнены из титанового сплава виде швеллера.
Верхняя и боковая стенки толщиной 0,004 м, а нижняя - 0,003 м, т.к. вся нагрузка действует на верхнюю стенку. Высота стенок 0,035 м. Расстояние между стенками, где движется подшипник, 0,065 м.
Направляющая 23 полуколец, по которым подшипники труб 14 крыльев перемещаются сверху вниз и снизу вверх, выполнена из титанового сплава с толщиной наружной и боковой стенкок 0,006 м, а внутренняя стенка толщиной 0,003 м. См. фиг.8.
Уголки 12 сделаны из титана. Размер длинной стороны 0,004 м, короткой - 0,03 м. Толщина длинной полки 0,004 м, короткой - 0,003 м.
Уголок 24 сделан из титана. Размер длинной стороны 0,035 м, короткой - 0,015 м, толщина - 0,003 м.
Длина среднего уголка 24 фермы равна 1,5 м.
Полоски 22 из титана служат для придания устойчивости ферме, ширина 0,02 м, толщина 0,002 м. Все детали соединяются при помощи сварки.
К направляющей 19 приварено 8 кронштейнов 30. Кронштейнами служат обрезки направляющей 19 длиной 0,4 м. В кронштейнах сделаны отверстия под болты для крепления распорных труб 13. Распорные трубы 13 изготовлены из алюминиевых сплавов. Наружный диаметр 0,03 м, внутренний диаметр 0,017 м, резьба М20. Для крепления труб применяются болты и шпильки. Длина распорной трубы 2,19 м. См. фиг.6.
У боковых ферм установки к кронштейнам 30 привариваются направляющие 29 подшипников рычага 20 удержания угла атаки крыла 43.
На фиг.8 показана левая ферма установки, а правая является зеркальным отражением левой.
Удержание угла атаки крыла (угол атаки примерно 20-23 градуса) происходит под действием рычага 20, фиг.5, фиг.10.
Рычаг выполнен в виде двух треугольных рамок, имеющих центральное кольцо 31, которое посажено на трубу 14 крыла и крепится болтом М8.
Рамка выполнена из титана. В сечении образующих рамки - прямоугольник со сторонами 0,04 м и 0,02 м, толщиной стенки 0,001 м. Рамки приварены к титановому кольцу 31, внутренний диаметр 0,03 м, наружный - 0,05 м, толщина - 0,02 м. Фиг.10.
К нижним концам рамки приварена титановая пластина 27 с отверстием для крепления оси 28 подшипника. Толщина пластины 0,005 м. Пластина в виде квадрата со стороной 0,04 м.
Между верхней поверхностью рычага и отверстием расстояние 0,2 м. Длинные стороны рамки образуют угол примерно 23 градуса.
В отверстие пластины 27 вставляется ось 28 с подшипником 180203.
Подшипник движется по направляющей 29, которая крепится с помощью кронштейна 30 к ферме. Направляющая 29 сделана из титанового сплава в виде швеллера, ширина 0,05 м и две стенки по 0,023 м, толщина всего швеллера 0,003 м.
Изменение угла атаки крыла показано на фиг.3.
Крыло, двигаясь в направляющих 19, тянет за собой подшипник рычага 20 по направляющей 29.
Расстояние от направляющей 19 до направляющей 29 равно 0,27 м.
Подшипник, который движется по направляющей 29, из положения 1′ перемещается в положение 2′. В это время передний подшипник рычага из положения 1″ переходит в положение 2″ и захватывается закругленной частью нижней направляющей 29, а задний подшипник рычага освобождается.
Радиус закругления захватывающей части направляющей 29 равен примерно 1 м и находится от центра окружности направляющей 23 на расстоянии 0,35 м в О2.
При дальнейшем движении крыла задний подшипник полностью освобождается и угол атаки крыла удерживает передний подшипник, положение 3″. Так происходит при движении крыла сверху вниз.
На фиг.4 показано, как происходит изменение угла атаки крыла при его движении снизу вверх.
Нижняя направляющая 29 подшипника рычага 20 на расстоянии 1,5 м до центральной оси окружности отклоняется от горизонтального положения в сторону направляющей 19 и подходит к ней на расстояние, равное 0,25 м.
Передний подшипник рычага подходит к центральной оси окружности, положение 4′.
В это время происходит захват дополнительной направляющей 32 заднего подшипника рычага, положение 4″.
Крыло, двигаясь по направляющей 19, тянет за собой задний подшипник рычага, положение 5″, в это время передний подшипник рычага, положение 5′, проходит разрыв между направляющими.
При достижении положения 6″ задним подшипником рычага происходит захват переднего подшипника рычага дополнительной направляющей 33, положение 6′.
Когда передний подшипник рычага займет положение 7′, произойдет захват заднего подшипника рычага закруглением верхней направляющей 29, положение 7″. При дальнейшем движении крыла передний подшипник освобождается. Радиус закругленного участка направляющей 29 примерно 0,7 м и центр находится в О3.
Крыло, достигнув верхнего положения, дальше будет двигаться под управлением заднего подшипника, как показано на фиг.3.
Устройство крыла показано на фиг.9. На трубе 14 крыла с помощью специальных винтов М8 закреплено пять нервюр 15. Нервюры изготовлены из алюминиевого сплава. Длина нервюры 0,9 м, толщина 0,005 м, величина ребра жесткости 0,005 м, толщина ребра 0,003 м.
Нервюры связаны между собой лонжеронами 16. Лонжероны изготовлены из алюминиевого сплава. Толщина лонжерона 0,005 м. Длина лонжерона 2 м. Каркас крыла обтянут специальной плотной тканью.
Труба 14 крыла 43 изготовлена из титанового сплава. Наружный диаметр трубы 0,03 м, внутренний диаметр 0,024 м, длина 2,178 м.
С двух сторон в трубу запрессованы бронзовые вставки 17. Фиг.5. На концы трубы 14 напрессованы подшипники 180206. Подшипники и вставки фиксируются установочными винтами М4 по два с каждой стороны от подшипника (не показано).
В бронзовых вставках 17 с наружных концов сделаны сферические углубления, в которых свободно находятся шарики 18. Диаметр шарика чуть меньше диаметра углубления и равен 0,014 м. Углубление прикрыто пластиной для того, чтобы шарик не выпал.
Шарик поставлен для того, что когда труба вместе с крылом сдвинется в осевом направлении, то не было бы большого торможения о направляющую 19, зазор между шариками и направляющими 19 по 0,003 м с обеих сторон.
На расстоянии 0,048 м от левого края трубы 14 установлен рычаг 20 положения угла атаки. Действие рычага 20 описано выше.
От левого края трубы 14 на расстоянии 0,082 м находится кронштейн крепления трубы 14 к ремню 10, показана нижняя часть 25 кронштейна.
На расстоянии 0,112 м от левого края трубы закреплена левая крайняя нервюра 15 крыла. От правого края трубы 14 крыла на расстоянии 0,035 м находится второй кронштейн крепления трубы к ремню, показана нижняя часть 25.
На расстоянии 0,066 м от правого конца трубы 14 закреплена крайняя правая нервюра 15.
Труба 14 крыла крепится к зубчатым ремням 10 с помощью разъемного кронштейна, он же является подшипником скольжения, показано на фиг.7.
Кронштейн состоит из верхней половины 45 и нижней части 25, которые с помощью двух болтов М8 соединяются.
Нижняя часть 25 с помощью двух зажимов 44 диаметром 0,006 и с резьбой М6 притягивается к тросу 34 ремня 10. Диаметр стального троса 0,006 м. Ремень изготовлен из эластичной пластмассы.
Ширина кронштейна равна 0,025 м, толщина верхней части 0,006 м, основание нижней части 25 равно 0,01 м.
В кронштейн поставлены пластмассовые вкладыши толщиной 0,002 м для того, чтобы обеспечить свободное вращение и движение трубы.
Чтобы обеспечить движение крыльев, применяется зубчатый ремень 10. См. фиг.7.
Шаг ремня 0,08 м. Количество зубьев на одном ремне 229. Ширина ремня 0,025 м, толщина 0,015 м. Глубина впадины 0,008 м.
Ремни в движение приводятся при помощи шкивов 9, фиг.6, фиг.12. Межосевое расстояние между шкивами 6,0184 м. Шкивы изготовлены из алюминиевого сплава.
Диаметр шкива 9 по выступам 2 м. Ступица шкива диаметром 0,08 м, внутренний диаметр 0,04 м, длина ступицы 0,04 м. Восемь спиц диаметром по 0,0225 м. Обод шириной 0,031 м, высота сечения обода 0,02 м, глубина впадины 0,008 м. Шкив 9 посажен на вал 11 на шпонку.
Привод осуществляется от двух газотурбинных двигателей 3, фиг 1, фиг 11. Момент вращения передается от газотурбинных двигателей 3 через редукторы 5 на стальной вал 39. Опорами концов вала 39 являются кронштейны 41 (фиг.1).
На валу 39, диаметром 0,03 м и длиной 4,52 м, с двух сторон посажены на шпонки две ведущие звездочки 6. Для передачи момента используется двойная роликовая цепь Пр-12,7-18,2.
Ведущая звездочка 6 имеет делительный диаметр 0,1255 м, стальная, закаленная. Количество зубьев 31.
Максимальное количество оборотов 76 об/с. Линейная скорость примерно 30 м/с.
Ведомая звездочка 7 изготовлена из титана, венец из стали, произведена закалка. Наружный диаметр ступицы 0,08 м, внутренний - 0,04 м, длина ступицы 0,05 м. Ширина сечения обода 0,0225 м, высота 0,01 м. Высота сечения венца 0,015 м, ширина 0,0225 м. Восемь спиц диаметром 0,022 м. Количество зубьев 247. Делительный диаметр 0,9985 м.
Левый двигатель 3 задействован на заднюю ведомую звездочку, а правый - на переднюю ведомую звездочку. Это сделано для того, чтобы была равномерной нагрузка на верхние и нижние ветви зубчатых ремней. Если откажет один из двигателей, то второй обеспечит плавный спуск на землю.
В редукторе 35 происходит отбор мощности на вращение вентилятора 4 через вал 37. С помощью вентилятора осуществляется поворот аппарата в ту или другую сторону в зависимости от угла поворота лопаток. Вентилятор крепится к кабине с помощью труб 46 (фиг.1). Вентилятор диаметром 1 м.
В редукторе 35 имеется сдвоенная шестерня, которая вращает еще два зубчатых колеса. Эти два колеса через валы и управляемые муфты соединены с двумя зубчатыми колесами редуктора 36.
В зависимости от того, какая включается муфта, в ту или другую сторону начинает вращаться средняя шестерня. Через вал 40, соединенный с этой шестерней, вращение передается на шестерню в редукторе 38.
Далее через шестерню, посаженную на вал 42, вращение передается на червячные редукторы 8.
В зависимости от того, куда вращается вал 42, происходит подъем или опускание передней части установки относительно кабины.
Вся установка облицована титановым листом, толщиной 0,5 миллиметра. Лист крепится на фермы, а спереди и сзади на специальные уголки. См. фиг.1.
Вес устройства.
2 фермы - 130 кг. 2 фермы - 207 кг
36 труб крыльев - 91 кг. 2 титановых вала - 51 кг.
180 нервюр - 153 кг. 8 алюминиевых шкивов - 136 кг.
2 титановых звездочки - 43 кг. 16 распорных труб - 46 кг.
Лист титановый 60 кв. м - 135 кг. 72 подшипника - 20 кг.
Итого - 1012 кг.
Примерно вес устройства 1110 кг.
Подъемная сила и мощность.
При движении крыльев поток воздуха отбрасывается вниз. Скорость движения крыльев 60 м/с.
Поэтому скорость движения воздуха через установку может достигать 60 м в секунду.
По известной формуле рассчитаем подъемную силу.
F=C·ρ·S·ν2/2=1·1,29·24·3600/2=55728 H
Сила сопротивления примерно равна 20%. Равна 11145 H.
Необходимая мощность.
Fv=11145*60=668736 Вт.
Необходимы двигатели по 400 кВт.
Реакция уходящих газов работающих газотурбинных двигателей будет увеличивать подъемную силу.
Движение вперед будет происходить при наклоне установки, т.е. передняя часть будет подтягиваться к кабине. Наклон может быть до 10 градусов.
При увеличении встречной скорости подъемная сила будет возрастать, т.к. будет увеличиваться скорость крыла набегающему потоку.
При применении более легких материалов для установки и увеличении скорости крыльев можно значительно увеличить подъемную силу, т.к. она растет пропорционально квадрату скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2013 |
|
RU2547667C1 |
| Летательный аппарат для транспортирования крупногабаритных грузов | 2019 |
|
RU2714973C1 |
| Многоосный летательный аппарат с вертикальным взлетом, посадкой и способ управления им | 2021 |
|
RU2768085C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ "ШОТА" СО СПЕЦИАЛЬНЫМ ВИНТОМ | 1990 |
|
RU2022875C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2509033C1 |
| ТРЕНАЖЕР КОСМОНАВТА | 2012 |
|
RU2490182C1 |
| КОНВЕРТОПЛАН | 2024 |
|
RU2827643C1 |
| ГИПЕРЗВУКОВОЙ САМОЛЕТ С ГАЗОДИНАМИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2012 |
|
RU2519556C2 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |





Изобретение относится к области авиации, в частности к летательным аппаратам вертикального взлета и посадки. Летательный аппарат вертикального взлета и посадки состоит из устройства для движения крыльев, кабины, двигателей, вентилятора. Устройство для движения крыльев состоит из четырех ферм, которые образованы из направляющих для направления движения подшипников труб крыльев, уголков и полосок, крыльев, которые имеют возможность создавать воздушный поток, зубчатых ремней, к которым крепятся крылья, шкивов, двух валов, на которых посажены шкивы, рычагов управления углами атаки крыльев, направляющих подшипников рычагов, приваренных к правой и левой фермам, двух ведомых звездочек и листа ограждения. Угол атаки крыльев не изменяется при их движении на прямолинейных участках вверху и внизу. Крылья имеют возможность изменять угол атаки при движении по полуокружности. Достигается возможность вертикального взлета и посадки, повышается эффективность силовой установки. 3 з.п. ф-лы, 12 ил.
1. Летательный аппарат вертикального взлета и посадки состоит из устройства для движения крыльев, кабины, двигателей, вентилятора, отличается тем, что устройство для движения крыльев состоит из четырех ферм, которые образованы из направляющих для направления движения подшипников труб крыльев, уголков и полосок; крыльев, которые имеют возможность создавать воздушный поток; зубчатых ремней, к которым крепятся крылья; шкивов; двух валов, на которых посажены шкивы; рычагов управления углами атаки крыльев; направляющих подшипников рычагов, приваренных к правой и левой фермам; двух ведомых звездочек и листа ограждения.
2. Летательный аппарат вертикального взлета и посадки по п.1 отличается тем, что крылья устройства для движения крыльев имеют возможность двигаться на прямолинейных участках вверху и внизу, при этом угол атаки крыла не изменяется при движении на прямолинейных участках вверху и внизу.
3. Летательный аппарат вертикального взлета и посадки по п.1 отличается тем, что крылья устройства для движения крыльев имеют возможность изменять угол атаки при движении по полуокружности.
4. Летательный аппарат вертикального взлета и посадки по п.1 отличается тем, что имеет возможность при изменении угла наклона устройства для движения крыльев относительно кабины изменять направление потока воздуха.
| АВИАПЛАТФОРМА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 1994 |
|
RU2090452C1 |
| ДВИЖИТЕЛЬ ЧИЧИГИНА | 1994 |
|
RU2089441C1 |
| US 6435827 B1, 20.08.2002 | |||
| RU 94015096 A1, 10.07.1996 | |||

