Изобретение относится к области создания систем подводного наблюдения, обеспечивающих мониторинг подводной обстановки в назначенном районе моря.
Традиционно для мониторинга подводной обстановки применялись стационарные гидроакустические комплексы зонального либо рубежного типа с крупногабаритными сосредоточенными излучающими и приёмными антеннами (типа "SOSUS") [1]. Однако эти комплексы имеют ряд существенных недостатков, к основным из которых относятся:
- низкая устойчивость к преднамеренному противодействию со стороны противника, обусловленная тем, что, ввиду больших габаритов подводного оборудования, его установка осуществляется с использованием специальных судов и контролируется с воздуха либо из космоса. В результате место установки подводного оборудования становится известным противнику;
- ввиду больших габаритов и высокого энергопотребления подводного оборудования установка стационарных гидроакустических комплексов возможна только вблизи собственного побережья, оборудованного мощными энергосистемами;
- высокая стоимость стационарных гидроакустических комплексов.
Для преодоления этих недостатков в конце прошлого века в области мониторинга подводной обстановки наметился переход от создания стационарных гидроакустических комплексов с крупногабаритными сосредоточенными излучающими и приёмными антеннами к распределённым системам подводного наблюдения (РСПН) [2-4], отличающимся тем, что в их состав входит большое количество относительно дешёвого малогабаритного подводного оборудования, которое может быть скрытно установлено практически в любом районе Мирового океана.
Проведенные исследования показали, что для мелких морей (с глубинами менее 500 м) могут быть предложены 2 варианта РСПН:
- стационарный вариант на базе заякоренных автономных гидроакустических станций [5,6];
- мобильный вариант на базе автономных необитаемых подводных аппаратов (АНПА) [7-10].
Для глубоких морей возможен только мобильный вариант.
Поскольку мобильный вариант может быть применён в любых районах Мирового океана, он является более предпочтительным.
В качестве прототипа выберем мобильную РСПН [9], в состав которой входят:
- пункт управления (ПУ), располагающийся на берегу либо на судне и оборудованный средствами связи с АНПА и необходимой инфраструктурой для технического обслуживания АНПА, включая ремонт и зарядку их аккумуляторов;
- комплект АНПА. Каждый АНПА, кроме средств управления и движения, оборудован гидроакустической аппаратурой поиска подводных объектов в пассивном и активном режимах, а также аппаратурой гидроакустической и радио (спутниковой) связи.
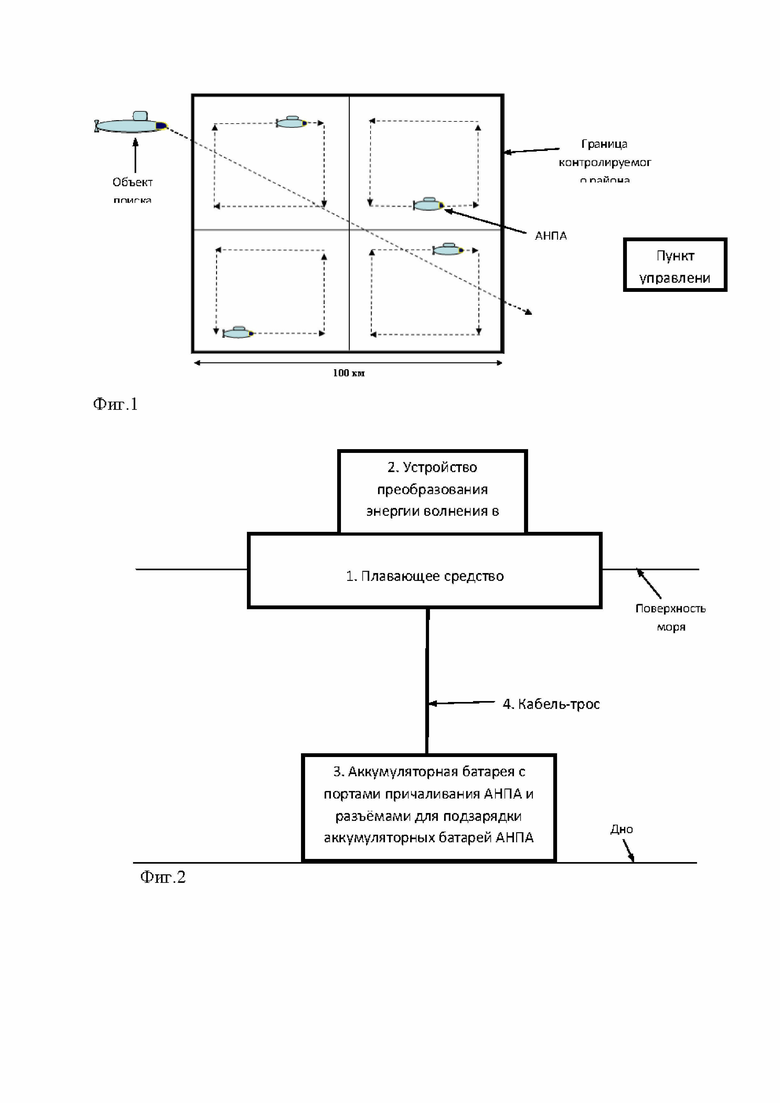
Мониторинг подводной обстановки мобильной РСПН осуществляется следующим образом (фиг.1). Каждому АНПА назначается свой подрайон в контролируемом районе, в котором он должен маневрировать, осуществляя поиск подводных объектов заданных классов с использованием гидроакустической аппаратуры, функционирующей в пассивном либо активном режиме. Количество АНПА, осуществляющих поиск, и размеры подрайонов определяются исходя из дальности обнаружения подводных объектов заданных классов в заданном режиме работы гидроакустической аппаратуры.
При обнаружении подводного объекта заданного класса тот АНПА, который обнаружил подводный объект, сообщает по гидроакустическому каналу связи соседним АНПА факт обнаружения и координаты обнаруженного подводного объекта и начинает слежение за обнаруженным подводным объектом с использованием гидроакустической аппаратуры в активном либо пассивном режиме. Один из АНПА, получивших сообщение, всплывает на поверхность и ретранслирует сообщение на пункт управления по радио либо спутниковому каналу связи.
Возможна и другая организация поиска подводных объектов в контролируемом районе. Например, подрайон поиска назначается каждой паре АНПА, которая осуществляет поиск в режиме бистатической гидролокации, в котором излучение зондирующих сигналов выполняется каждым АНПА по очереди, а приём эхосигналов производится обоими АНПА [10]. Использование бистатического режима гидролокации существенно увеличивает освещаемую площадь района.
При всех своих достоинствах мобильная РСПН имеет один существенный недостаток, которым является ограниченное время маневрирования АНПА в районе вследствие ограниченного запаса электроэнергии в аккумуляторной батарее и достаточно большого энергопотребления электроэнергии движительно-рулевым комплексом и гидроакустической аппаратурой. Выполненные оценки показывают, что при применении современной литий-ионной аккумуляторной батареи с удельной ёмкостью 0,15–0,25 кВт×час/кг [11] запаса электроэнергии АНПА хватит на несколько суток плавания. Если учесть время движения АНПА из базы до контролируемого района, время работы АНПА в районе может оказаться недопустимо малым.
Фактор ограниченного запаса электроэнергии приводит либо к промежуткам во времени мониторинга района, либо к необходимости иметь двойной комплект АНПА, один из которых осуществляет мониторинг подводной обстановки в районе, а другой осуществляет зарядку аккумуляторных батарей на береговой базе, что существенно удорожает мониторинг подводной обстановки.
Решаемая техническая проблема – повышение качества мобильной РСПН.
Достигаемый технический результат – повышение эффективности и уменьшение стоимости мобильной РСПН.
Указанный технический результат достигается тем, что в предлагаемом изобретении в состав мобильной РСПН дополнительно включают автономный волновой генератор (ВГ), который устанавливается на якоре в контролируемом районе либо вблизи него и вырабатывает электроэнергию путём преобразования энергии морского волнения в электрическую энергию. Выработанная электроэнергия накапливается в аккумуляторной батарее большой ёмкости. АНПА, у которого заканчивается запас электроэнергии в бортовой аккумуляторной батарее, подходит к ВГ и контактным либо бесконтактным способом подзаряжает свою аккумуляторную батарею от аккумуляторной батареи волнового генератора.
В мире создано большое количество вариантов ВГ [12,14, 21-81].
Анализ известных вариантов ВГ показывает, что далеко не все они могут быть применены для получения технического результата, заявленного в предлагаемом изобретении.
Близкими решениями являются следующие.
Известна волновая поплавковая электростанция [12], состоящая из цилиндрического буя сильно вытянутой формы, плавающего вертикально. Внутри буя установлен электрогенератор, состоящий из двух частей. Первая часть представляет собой линейный генератор, индуктор которого выполнен в виде инерционный массы с постоянными магнитами, движущейся вдоль вертикальной оси буя возвратно-поступательно под действием силы, обусловленной ускорением от вертикальных колебаний буя на волне. Вырабатываемая им электроэнергия пропорциональна скорости перемещения подвижной массы. Инерционная масса растянута на пружинах, что позволяет настраивать систему в резонансный режим с характерной частотой колебаний буя в воде. Обмотки линейного генератора закреплены на внутренней стенке корпуса генератора. Магниты объединены в кольцевые секции и размещены внутри обмотки якоря. Ток с этой части генератора подаётся в нагрузку, а также на электрическую машину, установленную на оси маховика, расположенного в нижней части корпуса буя. Электрическая энергия преобразуется в механическую путём раскручивания маховика, накапливающего излишнюю энергию, не переданную в нагрузку. Указанная электрическая машина, сопряжённая с маховиком, представляет собой вторую часть генератора. При небольшом волнении моря перемещение индуктора отсутствует, а вторая часть генератора, имеющая накопленную механическую энергию вращения маховика, преобразует её в электрическую с помощью той же электрической машины, которая ранее его раскручивала. Эта машина работает уже в режиме генератора. Кроме того, вращение маховика способствует выработке момента кориолисовых сил, используемого для стабилизации буя в вертикальном положении.
Недостатками электростанции являются:
1) Преобразование знакопеременного тока в первой части генератора в выпрямленный ток, что ведёт к получению значительной реактивной составляющей мощности в преобразователе, его нагреве и малом значении коэффициента полезного действия (к.п.д) преобразователя энергии.
2) Двойное преобразование электрической энергии во второй части генератора. Учитывая то, что каждое преобразование производится со своим к.п.д. электрической машины, суммарное к.п.д преобразования энергии волн также будет уменьшено.
3) Дополнительная сила трения в опорах маховика при выработке момента Кориолисовых сил, что также уменьшает суммарное к.п.д преобразователя энергии.
4) Малое отношение диаметра буя к его длине, что уменьшает восстанавливающую силу при собственных вертикальных колебаниях корпуса буя на волне. Эта особенность приводит к уменьшению собственной частоты его вертикальных колебаний, определяемой из выражения:
 , (1)
, (1)
где ωс - частота собственных вертикальных колебаний буя, ρ - плотность воды, g - ускорение свободного падения, S - площадь ватерлинии буя, m - масса буя, λ33 - присоединённая масса воды при вертикальных колебаниях буя. Выражение (1) напрямую вытекает из формулы, предложенной в [13, с.77]. Учитывая то, что буй является колебательным звеном, уменьшение частоты ωс приводит к тому, что он при плавании на поверхности взволнованного моря, плохо отслеживает профиль волн с частотами, лежащими выше ωс, тонет при прохождении их гребня и чрезмерно оголяется при прохождении подошвы, в связи с чем уменьшается вертикальная скорость при колебаниях буя на волне и, как следствие, к.п.д. преобразователя энергии волн. Кроме того, подобная форма корпуса не позволяет создать буй с частотными характеристиками качки, соответствующими частоте следования преобладающих волн и использовать резонансный режим работы поплавковой части буя.
В качестве прототипа волнового генератора выберем ВГ [14], представляющий собой плавающее на поверхности моря судно, оснащённое устройством выработки электроэнергии на основе использования энергии качки корпуса судна на волнении. Для отбора энергии бортовой и килевой качки судна, обусловленной морским волнением, на его палубе устанавливаются вдоль диаметральной плоскости и вдоль плоскости шпангоутов две пары рельс. На каждой паре рельс размещены тележки, нагруженные чувствительными массами. Тележки перемещаются на рельсах по палубе возвратно-поступательно под воздействием бортовой и килевой качки с её частотой. На осях колёс обоих тележек установлены генераторы электрической энергии.
Проведённый анализ показал, что устройство преобразования энергии волнения в электрическую энергию в данном ВГ при всех его достоинствах обладает недостаточно высоким к.п.д преобразования энергии качки в электрическую энергию. Это связано с тем, что:
1) Масса груза, установленного на тележках, может оказывать лишь незначительное влияние на кренящий момент судна. В противном случае судно потеряет остойчивость и перевернётся.
2) Конструкция судна не предусматривает настройку частоты качки в резонанс с преобладающей частотой волн для увеличения амплитуды качки и повышения к.п.д. генератора. Подобное изменение частоты, соответствующее длине волн будет происходить при изменении интенсивности волнения.
Мощность вырабатываемой энергии ограничена рядом факторов, среди которых длина рельсового пути, выбираемая из конструктивных особенностей судна. Кроме того преобразование знакопеременного тока, возникающего при реверсивном движении генераторов, в выпрямленный, что ведёт к получению значительной реактивной составляющей мощности в генераторе, его нагреве и малом значении к.п.д преобразователя энергии.
Для повышения к.п.д описанного в [14] устройства преобразования энергии волнения в электрическую энергию в ВГ предлагается применить комплекс следующих новых технических решений:
1) Максимальное использование кинетической энергии фронта волны для её преобразования в кинетическую энергию качки, путём совмещения периода собственных бортовых колебаний ПС с преобладающим периодом волн. При этом изменение собственного периода бортовых колебаний ПС производится путём изменения метацентрической высоты т.е. запаса его остойчивости в соответствии в формулой, для однокорпусного судна:
 , (2)
, (2)
где T - период собственных колебаний судна при бортовой качке; I - момент инерции массы судна (относительно продольной оси, проходящей через центр тяжести), вычисленный с учётом присоединённого момента инерции; D - водоизмещение судна; h - поперечная метацентрическая высота, т.е возвышение центра величины судна над центром тяжести [13, с.72]. Или для катамарана:
 , (3)
, (3)
где  и σ - соответственно коэффициенты полноты ватерлинии и общей полноты одного корпуса; N - осадка;
и σ - соответственно коэффициенты полноты ватерлинии и общей полноты одного корпуса; N - осадка;  - коэффициент, зависящий от относительного клиренса и поперечной метацентрической высоты [15, с.135].
- коэффициент, зависящий от относительного клиренса и поперечной метацентрической высоты [15, с.135].
2) Максимальное использование кинетической энергии качки путём совмещения периода собственных колебаний чувствительной подвижной массы с периодом качки ПС.
3) Применение однонаправленного вращения электрической машины, вырабатывающей электроэнергию.
Сущность предлагаемого изобретения.
Мобильная распределённая система подводного наблюдения, включающая комплект автономных необитаемых подводных аппаратов (АНПА), каждый из которых оборудован средствами управления и движения, гидроакустической аппаратурой поиска подводных объектов в пассивном и активном режимах и аппаратурой радио (спутниковой) связи, а также пункт управления, располагающийся на берегу либо на судне и оборудованный средствами связи с АНПА и необходимой инфраструктурой для технического обслуживания АНПА, включая ремонт и зарядку их аккумуляторных батарей, отличающаяся тем, что в её состав дополнительно включён автономный волновой генератор, состоящий из плавающего средства (ПС) на поверхности моря, установленного на нём устройства преобразования энергии бортовых колебаний ПС в электрическую энергию, включающего чувствительную массу, соединённую с электрической машиной, установленную на дне моря аккумуляторную батарею, оборудованную устройствами причаливания АНПА в форме раструбов с разъёмами для подзарядки аккумуляторных батарей АНПА контактным либо бесконтактным способом, а также кабель-трос, соединяющий аккумуляторную батарею волнового генератора с устройством преобразования энергии морского волнения в электрическую энергию.
При этом:
- Чувствительная масса устройства преобразования энергии бортовых колебаний ПС в электрическую энергию выполняет роль маятника, при этом период собственных бортовых колебаний ПС с преобладающим периодом волн совмещается за счёт изменения поперечной метацентрической высоты ПС, для чего на палубе ПС установлены две заполняемые водой балластные цистерны, подключённые к насосу и имеющие выпускные клапаны, уровень воды в которых задаётся вычислителем, чувствительная масса маятника установлена на подвесе изменяемой длины и закреплена на штанге в её нижней части, расположенной в воде, при этом верхняя часть подвеса имеет форму трубы, внутри которой перемещается вертикально штанга, верхняя часть подвеса частично находится на палубе ПС и закреплена на входном валу устройства преобразования энергии бортовых колебаний ПС на морском волнении, который разворачивается знакопеременно под воздействием этих колебаний, вертикальное перемещение штанги с чувствительной массой внутри трубы производится с помощью троса, прикреплённого к верхней части штанги, а трос, в свою очередь, намотан на шкив двигателя с редуктором и многооборотным датчиком угла.
- В устройстве преобразования энергии бортовых колебаний ПС в электрическую энергию преобразование колебаний маятника как по часовой, так и против часовой стрелки (разного знака) преобразуют в одностороннее вращение выходного вала устройства путём применения двух пар катушек, состоящих из двух ведущих катушек, установленных на входном валу устройства и двух ведомых катушек, при этом передача момента производится с помощью двух гибких кордовых нерастяжимых лент, намотанных на каждой паре ведомых и ведущих катушек, одна из ведомых катушек подсоединена к выходному валу через пару зубчатых колес, к выходному валу подсоединена плоская пружина, установленная в барабане с зубчатым венцом, который сопряжён через промежуточное колесо с валом электрической машины - генератора, ротор которого вращается в одну сторону, при этом на входном вале устройства также установлен датчик угла поворота вала, сигнал которого передаётся на вычислитель для управления выдвижной штангой и устройствами осушения и наполнения балластных цистерн.
Общий вид ВГ приведён на фиг. 2 в составе:
– плавающее средство (ПС);
– устройство преобразования энергии бортовых колебаний ПС в электрическую энергию (далее - устройство преобразования энергии);
– аккумуляторная батарея с портами причаливания АНПА и разъёмами для подзарядки аккумуляторных батарей АНПА;
– кабель-трос.
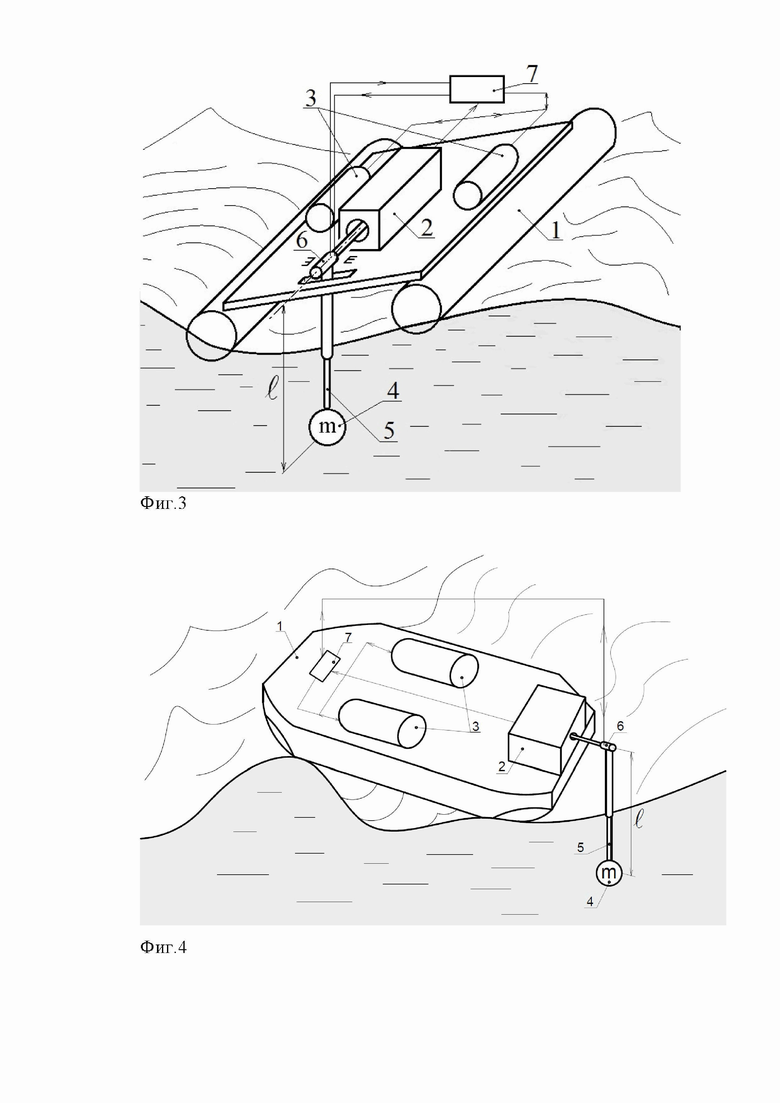
Конструкция устройства преобразования энергии приведена на фиг.3 – 5.
Обозначения на фиг.3 - 5:
1 – плавающее средство;
2 – устройство преобразования энергии;
3 – балластные цистерны;
4 – маятник с чувствительной массой;
5 – телескопическая штанга;
6 – привод телескопической штанги;
7 – вычислитель.
8 – входной вал;
9 – ограничитель разворота;
10 – датчик угла разворота;
11 – ведущая катушка;
12 – ведущая катушка;
13 – гибкая кордовая нерастяжимая лента;
14 – гибкая кордовая нерастяжимая лента;
15 – ведомая ведущая катушка;
16 – ведомая катушка;
17 – вал;
18 – промежуточный вал;
19 – зубчатое колесо;
20 – пружинный барабан;
21 – зубчатый венец;
22 – зубчатое колесо;
23 – электрическая машина-генератор;
24 – плоская спиральная пружина;
25 – труба;
26 – корпус привода в подшипниках;
27 – трос;
28 – шкив;
29 – многооборотный датчик угла;
30 – зубчатое колёсо.
31 -аккумуляторная батарея
Предлагаемая схема ВГ состоит из плавающего средства 1, устройства преобразования энергии 2, балластных цистерн 3, подключённых к насосу (на фиг. 3 и 4 не показан) и имеющих выпускные клапаны, маятника с чувствительной массой 4 устройства преобразования энергии и вычислителя 7.
Корпус ПС может иметь форму катамарана (фиг. 3) или однокорпусного судна (фиг.4).
Маятник может изменять длину подвеса за счёт изменения длины l телескопической штанги 5 с помощью привода 6 телескопической штанги. Балластные цистерны 3 оснащены уровнемерами (на фиг. 3 и 4 не показаны). Подача воды в эти цистерны производится с помощью насоса (на фиг. 3 и 4 не показан)., а опорожнение - самотёком путём открытия клапанов (на фиг. 3 и 4 не показаны).
Устройство преобразования энергии (фиг.5) состоит из двух частей - преобразователя энергии качки (ПЭК) и аккумулятора-преобразователя механической энергии (АПМЭ). ПЭК состоит из входного вала 8, на котором закреплен ограничитель разворота 9, датчик угла разворота 10, маятник с чувствительной массой 4, установленный на телескопической штанге 5. На входном валу 8 также закреплены две ведущие катушки 11 и 12, на каждой из которых намотана гибкая кордовая нерастяжимая лента 13 и 14. Обратные концы ленты 13 и 14 намотаны на ведомые катушки 15 и 16, при этом лента находится в натяжении. Ведомая катушка 15 установлена на валу 17, а ведомая катушка 16 на промежуточном валу 18. Зубчатое колесо вала 18 сопряжено с зубчатым колесом 19 вала 17.
АПМЭ состоит из пружинного барабана 20 с зубчатым венцом 21, соединённым с зубчатым колесом 22. При этом вал 17 входит в барабан 20, а колесо 22 установлено на валу электрической машины-генератора 23, вырабатывающей постоянный ток и подсоединённой к аккумуляторной батарее. Внутри пружинного барабана 20 установлена плоская спиральная пружина 24, установленная в барабане с зубчатым венцом 21, который сопряжён через промежуточное колесо с валом 17 электрической машины – генератора 23.
Телескопическая штанга 5 (фиг. 3 и 4) состоит из стержня в нижней части которого закреплена чувствительная масса 4. Стержень установлен в трубе 25 корпуса привода в подшипниках 26 и может перемещаться вертикально. Корпус привода 6 неподвижно закреплён к входному валу 8 фиг.5. К верхней части стержня прикреплён трос 27 (фиг.5), который наматывается на шкив 28 двигателя с редуктором, установленный на ось привода 6. На той же оси установлен многооборотный датчик угла 29.
Вычислитель 7 (фиг. 3 и 4) имеет в своём составе микропроцессорный блок, вырабатывающий команды управления, память с записанным алгоритмом управления, аналого-цифровой и цифро-аналоговый преобразователи, а также усилители аналоговых сигналов для управления насосом и клапанами балластных цистерн, приводом телескопической штанги 5. Вычислитель получает и обрабатывает измерительную информацию, получаемую от датчика угла разворота входного вала 1, уровнемеров балластных цистерн, многооборотного датчика угла 29.
Устройство преобразования энергии (фиг.5) работает следующим образом. ПС (фиг. 3 или 4) совершает вынужденные угловые знакопеременные бортовые колебания под воздействием волн относительно вертикального положения маятника 5. При этом маятник демпфирован водой и имеет массу m, соизмеримую с водоизмещением ПС. С целью максимального использовании кинетической энергии фронта волны для её преобразования в кинетическую энергию качки, путём совмещения периода собственных бортовых колебаний ПС с преобладающим периодом волн, производится изменение периода собственных бортовых колебаний ПС, которое можно определить с использованием выражений (2) или (3) путём изменения метацентрической высоты ПС. Её изменение производится путём заполнения или осушения балластных цистерн 3. Амплитуда и период качки определяются с помощью датчика угла разворота 10 (фиг. 5). При этом, вычислитель 7 выполняет расчёт вынужденных колебаний ПС.
Алгоритм настройки бортовых колебаний ПС в резонанс с преобладающей частотой волн после их произвольного заполнения включает:
1. Запись реализации колебаний за интервал 900 секунд, в течении которого процесс качки считается стационарным.
2. Определение максимального размаха колебаний ϴmax.
3. Определения зоны вторичных колебаний, составляющей 20% от максимального размаха ϴН.
4. Определение среднего значения размахов колебаний, вызванных преобладающими волнами ϴПi>ϴН, их числа N и среднего значения  .,
.,
где:  - среднее значение размахов колебаний, вызванных преобладающими волнами; ϴПi - размах i-го колебания (выходящий за зону вторичных колебаний); N -число размахов колебаний.
- среднее значение размахов колебаний, вызванных преобладающими волнами; ϴПi - размах i-го колебания (выходящий за зону вторичных колебаний); N -число размахов колебаний.
5. Вычисления периода преобладающих волн ТПi=900/2N.
6. Заполнение балластных цистерн на 10% объёма.
7. Повторение операций по пп. с 1 по 5.
8. Анализ значений , полученных до и после заполнения балластных цистерн.
9. В том случае, если значение , полученное после заполнения, имеет значение большее, чем то, которое получено до заполнения балластных цистерн, то следует заполнить цистерны по п.6, если меньшее, то следует начать уменьшение уровня воды в балластных цистернах: в первом случае на 20%, а далее на 10%.
10. После достижения последующего значения менее предыдущего, следует восстановить уровень воды в балластных цистернах в соответствии с предыдущим значением.
Выполнение настройки балластных цистерн производится в соответствии с алгоритмом в зависимости от того, является ли волнение затухающим, развивающимся или стационарным программно через интервал времени от одного часа до 12 часов. Расчёт всех значений качки в соответствии с алгоритмом производится с помощью вычислителя 7.
Установленный в нижней части ПС и демпфированный водой маятник будет иметь период собственных колебаний меньше периода Шулера, равного 84,4 минуты, в связи с этим будет возмущаться от ускорений при качке, кроме того его возмущения будут зависеть и от орбитального смещения ПС при колебаниях на волнах. Таким образом маятник будет совершать некоторые вынужденные колебания, относительно вертикального положения, с частотой этой вынуждающей силы. С целью максимального использования кинетической энергии качки для её преобразования в электрическую энергию период собственных колебаний чувствительной подвижной массы совмещается с периодом качки ПС. Для этого производится выбор длины l маятника с чувствительной массой 4 и её установка с помощью телескопической штанги 5. При этом резонансная частота колебаний маятника определится из выражения [16, с.230]
 ,
,
где  - собственная частота колебаний маятника;
- собственная частота колебаний маятника;
m - масса маятника;
l - длина его подвеса;
J - момент инерции системы;
g - ускорение свободного падения.
 - коэффициент демпфирования.
- коэффициент демпфирования.
lИ - плечо интегральной силы сопротивления, учитывающей сопротивление как самой чувствительной массы, так штанги её подвеса;
W - квадратичный коэффициент сопротивления движению маятника и его подвеса в воде, зависящий от скорости движения маятника и поперечного сечения маятника и штанги - подвеса, определяемый экспериментально.
Период колебаний ТР определяется по известной формуле  . Расчёт длины l производится с помощью вычислителя 7.
. Расчёт длины l производится с помощью вычислителя 7.
Отметим, что в связи с изменением фазы колебаний в области резонанса, маятник, при периодах качки ПС близких к периодам его собственных колебаний, будет отклоняться на малый угол в сторону, противоположную углу наклона ПС и развернёт входной вал 8 устройства преобразования энергии (фиг.5) на дополнительный угол. С целью предотвращения опрокидывания ПС при потере остойчивости, вызванной резонансными явлениями, этот входной вал устройства преобразователя энергии оснащён ограничителями разворота (упорами) 9, которые не позволят ему развернуться более заданного значения и предотвратят опрокидывание ПС.
При возникновении крена производится разворот ПС относительно вертикального положения маятника 4 с телескопической штангой 5, при этом разворачивается входной вал 8. Разворот вала преобразуется в выходной сигнал датчика угла разворота 10, передаваемый в вычислитель 7. При развороте ПС, относительно маятника с чувствительной массой 4 со штангой 5 по часовой стрелке, момент от вала 8 на вал 17 передаётcя с помощью гибкой кордовой нерастяжимой ленты (или ременной передачи) 13. При этом концы ленты имеют жёсткую заделку в катушках 11 и 15. При развороте вала 8 против часовой стрелки, момент от вала 8 передаётся на вал 17 с помощью гибкой кордовой нерастяжимой ленты (или ременной передачи) 14. При этом концы ленты имеют жёсткую заделку в катушках 12 и 15. При передаче момента лентой 13, лента 14 имеет слабину, а при передаче момента лентой 14, слабину имеет лента 13. При передаче момента провисание ленты, имеющей слабину, выбирается за счёт разворота вала 17. Благодаря паре зубчатых колёс 30 и 19, разворот оси 8 против часовой стрелки также преобразуется в разворот вала 17 по часовой стрелке. Таким образом ПЭК преобразует знакопеременную качку ПС относительно маятника, в разворот вала 17 по часовой стрелке. Разворот вала 17 приводит к закручиванию плоской спиральной пружины АПМЭ, расположенной в пружинном барабане 20. Момент закручивания пружины меньше момента восстанавливающих сил при бортовой качке ПС, что сохраняет его остойчивость. Зубчатый венец 16 барабана 15 разворачивает колесо 22 при раскручивании плоской спиральной пружины. Колесо 22 передаёт момент на ротор электрической машины 23, выполняющей роль генератора постоянного тока. Спиральная пружина имеет нормальную характеристику и почти постоянный момент при её раскручивании, что обеспечивает малое изменение числа оборотов ротора электрической машины [17, стр. 64, 66]. Вырабатываемый генератором 23 ток подаётся для пополнения заряда аккумуляторной батареи 31. Настройка в резонанс механической части генератора с частотой собственных колебаний ПС производится за счёт изменения длины подвеса маятника l путём выдвижения телескопической штанги 5 с чувствительной массой 4 из трубы 25. Установка телескопической штанги 5 в заданное положение производится с помощью его вертикального перемещения. Для этого трос, закреплённый в верхней части штанги и намотанный на шкиве 28 приводится в движение приводом 6. Для позиционирования штанги в заданном положении служит многооборотный датчик угла 29, связанный с вычислителем, и откалиброванный в зависимости от разворота шкива 28 и намотанной на нём длины троса 27. Изменение длины маятника производится в соответствие с функциональной зависимостью длины маятника от собственной частоты бортовой качки ПС и выполняется по команде от вычислителя. Указанная зависимость определяется экспериментально на основании записи свободных колебаний ПС с цистернами заполненными до различного уровня и с маятником разной длины по критерию достижения собственных колебаний ПС наибольшего размаха. Определение указанной функциональной зависимости выполняется экспериментально на тихой воде, при отсутствие внешних возмущающих сил.
Возможность работы волнового генератора проверена с помощью компьютерного моделирования. Полученные результаты позволяют сделать вывод, что указанные существенные признаки позволяют производить настройку частоты колебаний ПС в резонанс с преобладающей частотой волны, а механической системы генератора - в резонанс с преобладающей частотой бортовой качки, при этом вращение ротора электрической машины производится в одном направлении. Повышение КПД по сравнению с прототипом в среднем составляет 1,9 раза, что достигается настройкой всех систем генератора в резонансные режимы и вращением вала генератора в одну сторону.
Для обеспечения свободных колебаний ПС на морском волнении в состав кабель-троса включено пружинное устройство.
Для уменьшения потерь электрической энергии при её передаче от ВГ до аккумуляторной батареи, расположенной на дне, она подаётся под большим напряжением (с малой силой тока). Для этого в составе устройства преобразования энергии волнения в электрическую энергию предусмотрен повышающий трансформатор.
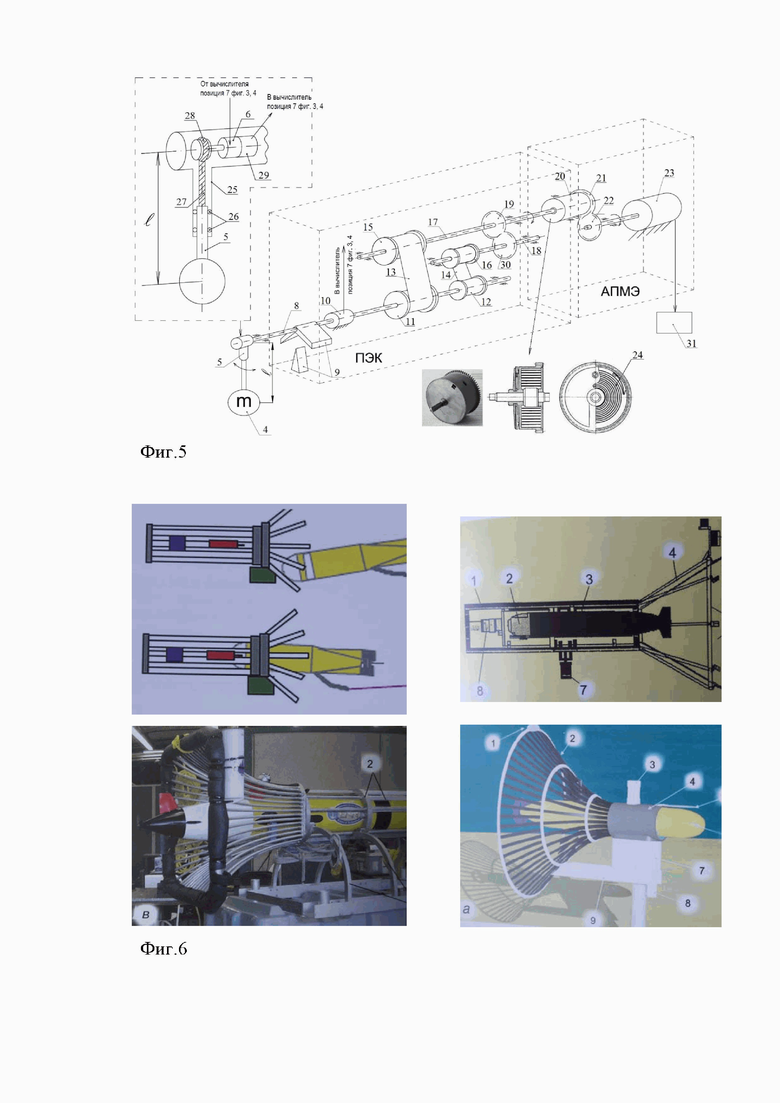
Порты причаливания АНПА выполнены в форме хорошо зарекомендовавших себя на практике раструбов с разъёмами для подзарядки аккумуляторных батарей АНПА контактным либо бесконтактным методом [18, с.232-248] (фиг.6).
Устройство бесконтактной подзарядки АНПА подробно описано в [19, 20].
С использованием заявленного изобретения мониторинг подводной обстановки осуществляется в течение неограниченного времени одним комплектом АНПА. В результате повышается эффективность освещения обстановки и сокращается стоимость мобильной РСПН.
Таким образом, предложенная совокупность технических решений позволит достичь заявленный технический результат – повышение эффективности и уменьшение стоимости мобильной РСПН.
Список использованных источников
1. The Sound Surveillance System (SOSUS) // SOSUS - Wikipedia (дата обращения 27.03.2021).
2. Коваленко В.В., Корчак В.Ю., Чулков В.Л. Концепция и ключевые технологии подводного наблюдения в условиях сетецентрических войн // Фундаментальная и прикладная гидрофизика. 2011. Т. 4. № 3. С. 49-64.
3. Коваленко В.В. Информационное обеспечение противолодочной борьбы // Морской сборник. 2015. № 10. С.39-48.
4. Коваленко В.В., Корчак В.Ю., Хилько А.И., Чулков В.Л. Требования к сетецентрическим системам подводного наблюдения // Фундаментальная и прикладная гидрофизика. 2014. Т. 7. № 2. С. 22-26.
5. Пешехонов В.Г., Брага Ю.А., Машошин А.И. Сетецентрический подход к решению проблемы освещения подводной обстановки в Арктике. – Известия ЮФУ. Технические науки. 2012. №3.С.19-227.
6. Машошин А.И. Оценка эффективности стационарной распределённой системы подводного наблюдения // Морской сборник. 2020. № 4. С.65-69.
7. Underwater robots could soon revolutionize coastal surveillance. http://www.joebuff.com/essay91.htm 2006.
8. Fletcher B. Autonomous Vehicles and the Net-Centric Battlespace // International UUV Symposium. 2000.
9. Спорышев М.С., Щербатюк А.Ф. Об использовании групп морских роботов для охраны водных акваторий: краткий обзор // Подводные исследования и робототехника. 2018. №2 (26). С.21-27.
10. Машошин А.И. Методы поиска подводных объектов мобильной распределённой системой подводного наблюдения // Гидроакустика. 2021. №3 (47). С.77-86.
11. Marini S., Gjeci N., et al. ENDURUNS: An Integrated and Flexible Approach for Seabed Survey Through Autonomous Mobile Vehicles // Journal of Marine Science and Engineering. 2020. no 8. рp 633-653.
12. Патент РФ № 2037642.
13. Ногид Л.М. Остойчивость судна и его поведение на взволнованном море. Ч.2 // Л.: Судостроение. 1967.
14. Патент РФ №2472669.
15. Бородай И.К. и др. Прикладные задачи динамики судов на волнении // Л.: Судостроение. 1989.
16. Кухлинг Х. Справочник по физике // М.: Мир. 1985.
17. Пономарёв С.Д., Андреева Л.Е.. Расчёт упругих элементов машин и приборов // М.: Машиностроение. 1980.
18. Илларионов Г.Ю., Сиденко К.С., Бочаров Л.Ю. Угроза из глубины: XXI век // Хабаровск: КГУП "Хабаровская краевая типография". 2011. 304с.
19. Подводные робототехнические комплексы: системы, технологии, применение /А.В. Инзарцев, Л.В. Киселев, В.В. Костенко, Ю.В. Матвиенко, А.М. Павин, А.Ф. Щербатюк [отв. ред. Л.В. Киселев] // Владивосток: Дальнаука. 2018. 368 с.
20. Герасимов В.А., Комлев А.В., Филоженко А.Ю. Средства повышения эффективности системы бесконтактного заряда аккумуляторных батарей автономного подводного аппарата // Подводные исследования и робототехника. 2020. № 1 (31). С.4-12.
21. Wave energy: a guide for investors and policy makers. Waveplam: www.waveplam.eu. Обновляемый документ.
22. Wave energy: Pre-feasibility studies. Waveplam: www.waveplam.eu. Обновляемый документ.
23. Francis J.M. Farley, R.C.T. Rainey. Anaconda: The bulge wave sea energy converter. MED: 2006.
24. P. Frigaard, J. Tedd, J.P. Kofoed, E. Friis-Madsen. 3 years experience with energy production on the Nissum Bredning Wave Dragon Proto Type.
25. www.wavedragon.net.
26. Falnes J. “Ocean Waves and Oscillating Systems”, Cambridge University Press, 2002.
27. Frigaard P. and Kofoed J.P. “Power production experience from Wave Dragon prototype testing in Nissum Bredning: 2003 to 2005” Aalborg University, 2005
28. Hald, T. and Frigaard, P.: Forces and Overtopping on 2. generation WD for Nissum Bredning. Phase 3 project, Danish Energy Agency. Project No. ENS-51191/00-0067. Hydraulics & Coastal Engineering Laboratory, Aalborg University, Denmark, 2001.
29. Kofoed J.P. “Wave overtopping of Marine Structures – Utilization of Wave Energy” Aalborg University, 2002.
30. Kofoed J.P., Frigaard P., Friis-Madsen E. and Sørensen H.C. “Prototype testing of the wave energy converter wave dragon” Renewable Energy 31, 2006.
31. Tedd, J., Kofoed, J.P., Knapp, W., Friis-Madsen, E., and Sørensen, H.C.: Wave Dragon, prototype wave power production. World Renewable Energy Congress - IX, Florence, Italy, August, 19-25th, 2006.
32. Keller J., Rohne W., Böhm C. and Knapp W. “Wave Dragon, Development and Tests of a Variable Speed Axial Turbine” TU München, 2001.
33. открытые БД патентов России на сайте www.fips.ru.
34. открытые БД патентов US на сайте www.uspatents.gov.
35. Peter Frigaard, Jens Peter Kofoed, Wilfried Knapp. Wave Dragon. Wave Power Plant using Low-head Turbines.
36. www.wavedragon.co.uk.
37. www.wavedragon.net.
38. www.civil.auc.dk/~i5jpk/wd/wdnb.htm.
39. http://eecs.oregonstate.edu
40. http://en.wikipedia.org/wiki/CETO_Wave_Power
41. http://atecom.ru/ru/wave-energy/fweps-prototype/
42. http://en.wikipedia.org/wiki/Wavebob
43. http://wavebob.com/wavebob-at-sea-west-of-ireland/
44. http://greenlightpole.com/Home.html
45. Paul Berrill, PowerBuoy wave generator nears test readiness. Recharge: the global source for renewable energy news. Published: Thursday, June 11 2009.
46. http://en.wikipedia.org/wiki/Wave_energy
47. Autonomous PowerBuoyTM OPT: Ocean Power Technology. Handbill.
48. http://www.oceanpowertechnologies.com
49. http://www.waveriderenergy.com.au
50. A $5 MILLION wave energy pilot plant will be built off the Eyre Peninsula coast. Adelaide Now….May 19, 2009 11:30PM, from site: http://www.adelaidenow.com.au
51. http://www.npower-renewables.com/siadar/
52. http://renewableenergydev.com/red/wave-energy-siadar-bay-wave-energy-project/
53. http://www.wavegen.co.uk/news_npower april 08.htm
54. http://en.wikipedia.org/w/index.php?title=Siadar_Wave_Energy_Project&redirect=no
55. http://www.oceanlinx.com.au
56. http://www.energetech.com.au/index.htm
57. Marine Energy Challenge: Oscillating Water Column Wave Energy Converter Evaluation Report. \\egynts01\jobs\100000\115214-00\4 internal project data\4-05 reports\workingdrafts\owc final report rev1.doc
58. IEA-OES: Annual Report 2008: www.iea-oceans.org
59. Oceanlinx_Technical_Facts_Sheet_v3_Eng. © Copyright Oceanlinx Limited 2009.
Islay60. limpet project monitoring final report. ETSU V/06/00180/00/Rep. © Crown Copyright 2002.
61. Tom Heath BSc,PhD,M.I.Mech.E C.Eng – Wavegen. Realities of Wave Technology.
Islay62. limpet wave power plant. The Queen’s University of Belfast. Contract JOR3-CT98-0312. Publishable report. 1 November 1998 to 30 April 2002.
63. Wikipedia: Islay LIMPET.
64. http://www.aquamarinepower.com/
65. http://inhabitat.com/the-oyster-wave-generator-2-buoyant-wave-power-without-the-turbine
66. http://en.wikipedia.org/wiki/Oyster_wave_energy_converter
67. http://www.atargis.com/index.html
68. Hans Christian Soerensen, PhD, Project coordinator Wave Dragon. Wave Dragon – from the 20 kW to the 7 MW prototype device. EU Contractors’ meeting October 2006, H. C. Soerensen.
69. P. Frigaard, J. Tedd , J.P. Kofoed, E. Friis-Madsen. 3 years experience with energy production on the Nissum Bredning Wave Dragon Proto Type.
70. Peter Frigaard, Jens Peter Kofoed & Wilfried Knapp. Wave Dragon. Wave Power Plant using Low-head Turbines.
71. Lars Christensen, Wave Dragon Aps And Ltd, Denmark, Erik Friis-Madsen, Wave Dragon Aps And Ltd, Denmark, Jens Peter Kofoed, Aalborg University, Denmark, James Tedd, Spok Aps, Denmark. Worlds largest wave energy project 2007 in wales. PowerGen 2006 Europe conference – Wave Dragon.
72. Lars Christensen, Wave Dragon Aps And Ltd, Denmark, Erik Friis -Madsen, Wave Dragon Aps And Ltd, Denmark, Jens Peter Kofoed, Aalborg University, Denmark. The wave energy challenge the wave dragon case. PowerGen 2005 Europe conference – Wave Dragon.
73. H.C. Soerensen, E. Friis-Madsen, W. Panhauser, D. Dunce, J. Nedkvintne, P. Frigaard, J.P. Kofoed, W. Knapp, S. Riemann, E. Holmén, A. Raulund, J. Praest, L.K. Hansen, L. Christensen, T. Nöhrlind, T. Bree, P. McCullen. Development of Wave Dragon from Scale 1:50 to Prototype. Fifth European Wave Energy Conference, Cork Ireland, 2003.
74. Jens Peter Kofoed, Peter Frigaard, Erik Friis-Madsen & Hans Chr. Sørensen. Prototype Testing of the Wave Energy Converter Wave Dragon. World Renewable Energy Congress VIII (WREC 2004). Copyright 2004. Published by Elsevier Ltd. Editor AAM Sayigh.
75. http://www.wavedragon.net/index.php
76. Pelamis wave power. PWP-brochure-online: www.pelamiswave.com.
77. http://www.pelamiswave.com/our-projects/project-overview
78. http://en.wikipedia.org/wiki/Pelamis_Wave_Energy_Converter
79. Anaconda Bulge Wave Power Generator: Find out about the Anaconda wave-power machine. REUK.co.uk
80. Membrana. Люди. Идеи. Технологии. Резиновая анаконда запитает энергией 2000 домов. 7 июля 2008.
81. Francis J.M. Farley and R.C.T. Rainey. Anaconda. The bulge wave sea energy converter. MED: Maritime Energy Development Ltd.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ КАЧКИ ПЛАВАЮЩЕГО СРЕДСТВА | 1989 |
|
RU2046994C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| СИСТЕМА ПРИВЕДЕНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА К ДОННОМУ ПРИЧАЛЬНОМУ УСТРОЙСТВУ | 2020 |
|
RU2750550C1 |
| УСТРОЙСТВО ДЛЯ ЗАРЯДКИ АККУМУЛЯТОРНОЙ БАТАРЕИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО ОБЪЕКТА | 2015 |
|
RU2611068C1 |
| Способ управляемого изменения крена автономного необитаемого подводного аппарата | 2024 |
|
RU2823820C1 |
| Способ навигационной поддержки глубоководного автономного необитаемого подводного аппарата | 2023 |
|
RU2815198C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2014 |
|
RU2585500C1 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВОЛН | 2016 |
|
RU2646523C2 |
Изобретение относится к области создания систем подводного наблюдения, обеспечивающих мониторинг подводной обстановки в назначенном районе моря. Мобильная распределённая система подводного наблюдения включает в себя комплект автономных необитаемых подводных аппаратов (АНПА), каждый из которых оборудован средствами управления и движения, гидроакустической аппаратурой поиска подводных объектов в пассивном и активном режимах и аппаратурой радио (спутниковой) связи, а также пункт управления, располагающийся на берегу либо на судне и оборудованный средствами связи с АНПА и необходимой инфраструктурой для технического обслуживания АНПА, включая ремонт и зарядку их аккумуляторных батарей. В состав мобильной распределённой системы подводного наблюдения дополнительно включён автономный волновой генератор, который состоит из плавающего средства (ПС) на поверхности моря, установленного на нём устройства преобразования энергии бортовых колебаний ПС в электрическую энергию, включающего чувствительную массу, соединённую с электрической машиной. На дне моря установлена аккумуляторная батарея, оборудованная устройствами причаливания АНПА в форме раструбов с разъёмами для подзарядки аккумуляторных батарей АНПА контактным либо бесконтактным способом. Кабель-трос соединяет аккумуляторную батарею волнового генератора с устройством преобразования энергии морского волнения в электрическую энергию. Достигается повышение эффективности мобильной распределённой системы подводного наблюдения. 2 з.п. ф-лы, 6 ил.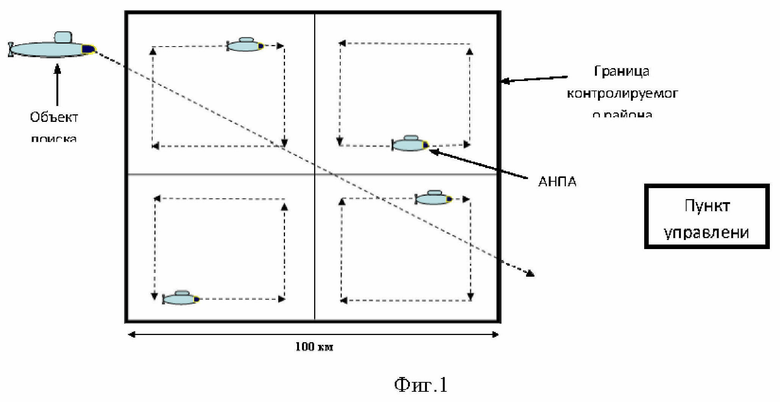
1. Мобильная распределённая система подводного наблюдения, включающая комплект автономных необитаемых подводных аппаратов (АНПА), каждый из которых оборудован средствами управления и движения, гидроакустической аппаратурой поиска подводных объектов в пассивном и активном режимах и аппаратурой радио (спутниковой) связи, а также пункт управления, располагающийся на берегу либо на судне и оборудованный средствами связи с АНПА и необходимой инфраструктурой для технического обслуживания АНПА, включая ремонт и зарядку их аккумуляторных батарей, отличающаяся тем, что в её состав дополнительно включён автономный волновой генератор, состоящий из плавающего средства (ПС) на поверхности моря, установленного на нём устройства преобразования энергии бортовых колебаний ПС в электрическую энергию, включающего чувствительную массу, соединённую с электрической машиной, установленную на дне моря аккумуляторную батарею, оборудованную устройствами причаливания АНПА в форме раструбов с разъёмами для подзарядки аккумуляторных батарей АНПА контактным либо бесконтактным способом, а также кабель-трос, соединяющий аккумуляторную батарею волнового генератора с устройством преобразования энергии морского волнения в электрическую энергию.
2. Мобильная распределённая система подводного наблюдения по п.1, отличающаяся тем, что чувствительная масса устройства преобразования энергии бортовых колебаний ПС в электрическую энергию выполняет роль маятника, при этом период собственных бортовых колебаний ПС с преобладающим периодом волн совмещается за счёт изменения поперечной метацентрической высоты ПС, для чего на палубе ПС установлены две заполняемые водой балластные цистерны, подключённые к насосу и имеющие выпускные клапаны, уровень воды в которых задаётся вычислителем, чувствительная масса маятника установлена на подвесе изменяемой длины и закреплена на штанге в её нижней части, расположенной в воде, при этом верхняя часть подвеса имеет форму трубы, внутри которой перемещается вертикально штанга, верхняя часть подвеса частично находится на палубе ПС и закреплена на входном валу устройства преобразования энергии бортовых колебаний ПС на морском волнении, который разворачивается знакопеременно под воздействием этих колебаний, вертикальное перемещение штанги с чувствительной массой внутри трубы производится с помощью троса, прикреплённого к верхней части штанги, а трос, в свою очередь, намотан на шкив двигателя с редуктором и многооборотным датчиком угла.
3. Мобильная распределённая система подводного наблюдения по п.2, отличающаяся тем, что в устройстве преобразования энергии бортовых колебаний ПС в электрическую энергию преобразование колебаний маятника как по часовой, так и против часовой стрелки (разного знака) преобразуют в одностороннее вращение выходного вала устройства путём применения двух пар катушек, состоящих из двух ведущих катушек, установленных на входном валу устройства, и двух ведомых катушек, при этом передача момента производится с помощью двух гибких кордовых нерастяжимых лент, намотанных на каждой паре ведомых и ведущих катушек, одна из ведомых катушек подсоединена к выходному валу через пару зубчатых колес, к выходному валу подсоединена плоская спиральная пружина, установленная в барабане с зубчатым венцом, который сопряжён через промежуточное колесо с валом электрической машины - генератора, ротор которого вращается в одну сторону, при этом на входном валу устройства также установлен датчик угла поворота вала, сигнал которого передаётся на вычислитель для управления выдвижной штангой и устройствами осушения и наполнения балластных цистерн.
| СУДНО, ИСПОЛЬЗУЮЩЕЕ ЭНЕРГИЮ КАЧКИ КОРПУСА | 2011 |
|
RU2472669C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ПРЕССОВ ПОД НАГРУЗКОЙ | 1956 |
|
SU111308A1 |
| US 5869756 A1, 09.02.1999 | |||
| DE 3151028 A1, 28.07.1983. | |||

