Изобретение относится к области устройств наблюдения, предназначенных для непрерывного контроля над отдельными участками водной поверхности, обнаружения надводно/подводных целей, при решении задач охраны протяженных морских участков, способных автономно эксплуатироваться длительное время, за счет возможности пополнять электроэнергию в процессе эксплуатации.
У России самые протяженные морские границы в мире, поэтому она содержит многочисленный пограничный флот для контроля водного пространства в прибрежной зоне, в проливах и экономической зоне нашей страны, для предотвращения несанкционированного проникновения и прохода в особых зонах (Северный морской путь), ведения незаконной хозяйственной деятельности.
При этом, береговая охрана вынуждена действовать в совершенно разных климатических и географических условиях, что определяет наличие различных типов кораблей. Корабли ледового класса для арктической зоны, корабли повышенной дальности и автономности на Дальнем Востоке, небольшие маневренные скоростные катера для Каспийского бассейна.
Использованием только плавсредств невозможно обеспечить охрану морской границы России, для эффективного контроля необходимо комплексное применение, как корабельного состава, так и авиации, в том числе и беспилотной, стационарных и подвижных постов наблюдения и различных других технических средств. Для обеспечения непрерывного контроля за надводной и подводной обстановкой необходимо оснащение пограничных органов современными средствами вооружения, военной и специальной техникой.
В настоящее время для охраны государственной границы успешно применяются беспилотные летательные аппараты, телевизионная техника российского производства и автоматизированные комплексы энергообеспечения технических средств с использованием источников альтернативной энергии. Прорабатываются вопросы по использованию возможностей средств дистанционного зондирования земной поверхности с космических аппаратов для мониторинга обстановки на государственной границе.
Для непрерывного контроля за обстановкой на морском участке границы используются стационарные пассивные гидроакустические комплексы, способные обнаруживать по гидроакустическому полю подводные и надводные объекты, вести гидроакустическое наблюдение за обнаруженными надводными и подводными объектами с определением курса, скорости и модели их поведения, автоматизированной классификацией объектов по их шумоизлучению.
Эффективными средствами наблюдения за надводной да и подводной обстановкой выступают радиолокационные станции (РЛС) способные обнаруживать объекты на больших расстояниях и в любую погоду. РЛС имеют возможность обнаруживать и погруженные в воду объекты, так как они создают волны на поверхности воды. Этот эффект активно используется для обнаружения подводных лодок.
Известен способ построения радиолокационной станции кругового обзора привязного аэростата (Патент RU №2652512 от 2018 года), размещенной в газонаполненной радиопрозрачной оболочке привязного аэростата, ее антенна с установленной на ней аппаратурой приводится моментным двигателем в непрерывное вращение вокруг оси карданного сочленения РЛС с несущей платформой аэростата, образуя маховик гироскопического маятника, а приращения азимутального угла диаграммы направленности антенны определяются по показаниям лазерного гониометра, связанного с антенной, причем начало отсчета системы координат антенны определяется путем эпизодических пеленгаций наземного ориентира с известными координатами относительно координат аэростата.
Недостатком этого устройства является отсутствие возможности автономной работы без использования внешних средств электропитания.
Так же известен мобильный гидроакустический буй-маяк (Патент RU №2709058 от 2018 г), включающий источник тока, аппаратуру управления, всплывающий поплавок с антенной и приемником спутниковой системы навигации типа ГЛОНАСС и аппаратурой приема и излучения гидроакустических сигналов, мобильный гидроакустический буй-маяк размещается в отдельном модуле автономного необитаемого подводного аппарата, имеющего бортовую систему управления, устройства связи и навигации, энергосиловую установку с источником энергии и двигателем, движитель, приводы рулевых машинок и наружное оперение с рулями, дополнительно модуль оборудуется устройством отделения всплывающего поплавка с антенной от подводного аппарата и возвращения его обратно с приводом и катушкой с кабелем, связывающим приемник спутниковой системы навигации, расположенной в поплавке с антенной, с аппаратурой управления буя, а также устройством распознавания сигналов запроса своих сил для разрешения передачи запрашиваемой ими информации, шифратором, преобразующим информацию для предотвращения ее восстановления в случае перехвата посторонними объектами и дешифратором, осуществляющим обратное преобразование информации, вычислительным устройством и датчиками гидростатического и гидродинамического давления, служащими для расчета скорости дрейфа мобильного гидроакустического буя-маяка при его покладке на грунт, направления и величины горизонтального сноса поплавка относительно точки постановки.
Недостатком этого устройства является необходимость обеспечения работы устройства надводными или подводным плавсредствами, при этом мобильный гидроакустический буй-маяк зависит от погодных условий.
Требуется постоянное сопровождение для обработки получаемой информации и питания технических устройств.
Наиболее близкой по технической сущности к заявленному изобретению является автономный пост технического наблюдения для контроля обстановки на охраняемой территории (Патент RU №2634761 от 2016 года), содержащий мультиспектральную систему видеонаблюдения в составе видеокамеры дальнего обзора и тепловизора, размещенных на поворотной платформе; систему приема и передачи данных по радиоканалу; систему автономного энергоснабжения в составе солнечных батарей, ветрогенератора с вертикальной осью вращения и блока аккумуляторных батарей, пост выполнен в виде единой конструкции, включающей полое основание, на боковой наружной поверхности которого размещены солнечные батареи, закрепленный на верхней поверхности основания ветрогенератор с вертикальной осью вращения, наверху которого находится площадка с размещенными на ней поворотной платформой с мультиспектральной системой видеонаблюдения, и системой приема и передачи данных по радиоканалу, а также соединенный с нижней частью основания поста подземный герметичный кессон, в котором расположены аккумуляторные батареи и зарядное устройство, на верхней площадке ветрогенератора размещена радиолокационная станция.
Недостатком этого устройства является сложность конструкции, создание капитального сооружения для размещения ветрогенератора и солнечных батарей, которые к тому же расположены под углом, который не позволяет в любое время светового дня использовать их на максимальную мощность. Все это громоздкое сооружение служит для размещения мультиспектральной системы видеонаблюдения, имеющей в своем составе только видеокамеры дальнего обзора, тепловизор и радиолокационную станцию. Ответствует возможность перемещения устройства на другой участок местности.
Задачей изобретения является создание устройства, способного при помощи видео и радиотехнических средств обнаружения, установленных таким образом, чтобы эффективно использовать заложенные технические возможности, длительное время, автономно осуществлять наблюдение за надводной и подводной обстановкой и своевременно обнаруживать, оповещать и выдавать характеристики и параметры движения об обнаруженных объектах, а при необходимости, перемещать средства обнаружения на новый участок акватории.
Требуемый технический результат достигается тем, что система наблюдения за надводной и подводной обстановкой позволяет удерживать средства наблюдения за надводной обстановкой на заданной высоте и генерировать электроэнергию с помощью вращающегося аэростата с лопастями. Аэростат связан тросом с ротором электрогенератора, генерирующего электроэнергию для обеспечения электропитания видеокамеры, тепловизора, радиолокационной станции и других потребителей, а также подзарядки аккумуляторной батареи. Электрогенератор расположен в верхней части радиопрозрачного корпуса, внутри которого находится радиолокационная станция (РЛС) с фазированной антенной решеткой, имеющей два противоположно направленных сегмента для обеспечения наблюдения в секторе обзора 360 градусов, а снизу располагаются видеокамера и тепловизор. В нижней части радиопрозрачный корпус соединен тросом с электролебедкой, находящейся в корпусе устройства гидроакустического обнаружения, выполненном в виде полупогруженного цилиндра. Трос обеспечивает механическое удержание конструкции на определенной высоте, внутри него проложена кабельная линия для снабжения электроэнергией потребителей от генератора у РЛС, также на тросе расположена антенна системы приема и передачи данных. Система приема и передачи данных по радиоканалу передает информацию об обнаруженных объектах на пункт управления. В верхней части устройства гидроакустического обнаружения расположены приборы системы гидроакустического обнаружения, системы приема и передачи данных, вычислительный комплекс, воздушный насос с датчиком давления, электрогенератор с жестко закрепленным на роторе винтовым пропеллером, установленным в боковом вырезе корпуса. В нижней части корпус устройства гидроакустического обнаружения соединен с трубой меньшего диаметра, на ней расположены гидрофоны системы гидроакустического обнаружения. Эта труба в нижней части имеет вырезы для забора воды и при помощи груза, в роли которого выступает аккумуляторная батарея, зафиксирована на грунте.
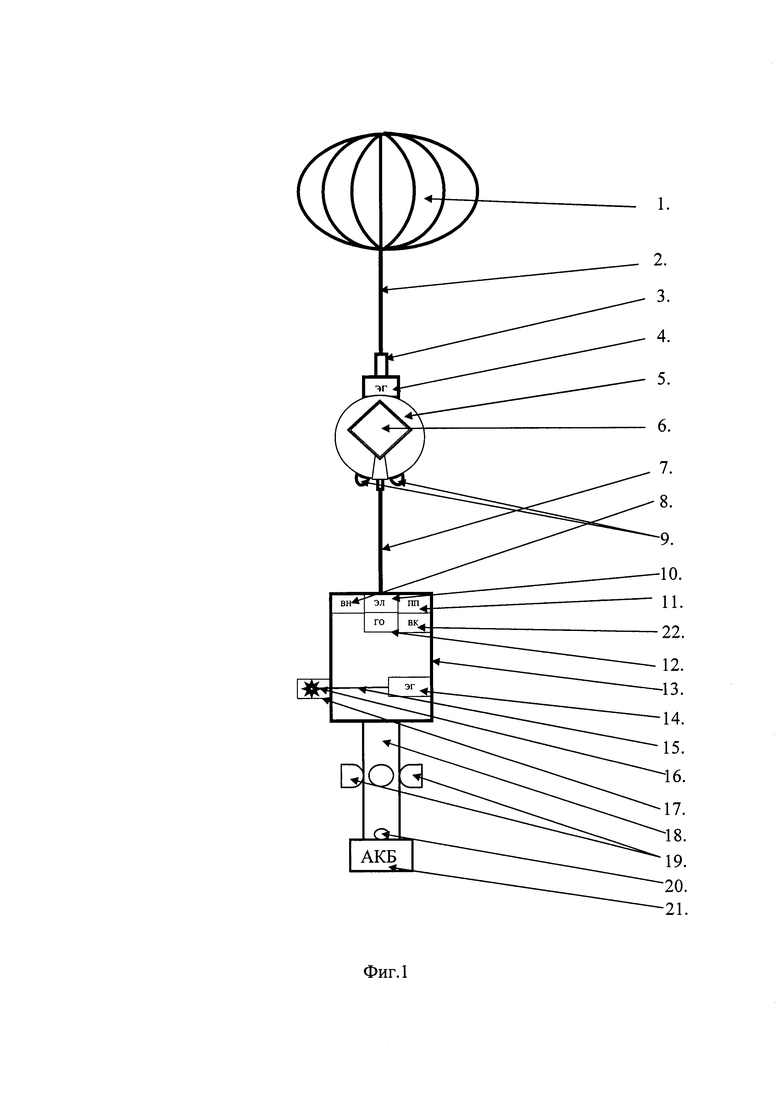
Сущность изобретения поясняется чертежом, где на Фиг. 1 представлена система наблюдения за надводной и подводной обстановкой, состоящая из:
1. - аэростат с лопастями;
2. - трос аэростата;
3. - ротор электрогенератора;
4. - электрогенератор для РЛС;
5. - радиопрозрачный корпус;
6. - радиолокационная станция;
7. - трос РЛС;
8. - воздушный насос с датчиком давления;
9. - видеокамера и тепловизор;
10. - электролебедка;
11. - система приема и передачи данных;
12. - приборы системы гидроакустического обнаружения;
13. - корпус устройства гидроакустического обнаружения;
14. - электрогенератор для системы гидроакустического обнаружения;
15. - ротор электрогенератора;
16 - винтовой пропеллер на роторе электрогенератора;
17 - боковой вырез корпуса;
18 - труба меньшего диаметра;
19 - гидрофоны системы гидроакустического обнаружения;
20 - вырезы в нижней части трубы;
21 - аккумуляторная батарея,
22 - вычислительный комплекс.
Перед началом эксплуатации системы наблюдения за надводной и подводной обстановкой необходимо провести ряд подготовительных операций. Для этого в заданном месте акватории, требующем постоянного контроля за надводной и подводной обстановкой, определяется глубина и выставляется устройство гидроакустического обнаружения (13) таким образом, чтобы аккумуляторная батарея (21) в герметичном корпусе располагалась на грунте, выполняя роль груза. Положительная, стабильная температура водной среды позволяет использовать аккумуляторную батарею (21) независимо от перепадов температур в атмосфере, избегать потери емкости при низких температурах и быстрой изнашиваемости при высоких. При необходимости, исходя из характеристик грунта и гидрологии, возможно увеличение массы груза за счет использования специального балласта. К грузу на грунте крепится нижняя часть трубы меньшего диаметра (18) с вырезами (20), выполненная из полимерных материалов и имеющая небольшой вес. Сечение трубы (18) рассчитывается и зависит от глубины в районе установки и мощности электрогенератора (14).
Предварительно производится сборка и установка конструкции: в корпус устройства гидроакустического обнаружения (13) устанавливаются все приборы и устройства, устанавливаются гидрофоны системы гидроакустического обнаружения (19), присоединяется труба (18). Вода, поднимаясь по трубе (18), заполняет свободное пространство и сжимает воздух, находящийся внутри корпуса устройства гидроакустического обнаружения (13), который выполнен в виде полого цилиндра с герметичной верхней частью. Запас воздуха во внутреннем объеме создает положительную плавучесть корпусу устройства гидроакустического обнаружения (13) и придает ему вертикальное положение. Для генерации электроэнергии с помощью электрогенератора (14) необходимо, чтобы уровень воды внутри корпуса поднимался выше жестко закрепленного на роторе электрогенератора винтового пропеллера (16), расположенного в боковом вырезе корпуса (17). С помощью воздушного насоса с датчиком давления (8) во внутреннем пространстве корпуса устройства гидроакустического обнаружения (13) создается пониженное давление.
К электролебедке (10) подключается трос РЛС (7), который обеспечивает подъем радиопрозрачного корпуса (5) на высоту, позволяющую средствам наблюдения, прежде всего РЛС (6), наблюдение на максимальную дальность с высоким качеством распознавания целей. Трос, имея внутри кабельную линию, также обеспечивает соединение в общую сеть электропитания потребителей: РЛС (6), видеокамеры и тепловизора (9), электролебедки (10), системы приема и передачи данных (11) приборов системы гидроакустического обнаружения (12), вычислительного комплекса (22), гидрофонов (19); устройств генерации электроэнергии: электрогенератор для РЛС (4), электрогенератор для системы гидроакустического обнаружения (14) и аккумуляторная батарея (21).
Ротор (3) электрогенератора для РЛС (4) сверху радиопрозрачного корпуса (5) соединяется тросом (2) с аэростатом с лопастями (1). Длина троса аэростата (2) подбирается исходя из силы и продолжительности воздушных потоков в данной местности и на предполагаемой высоте эксплуатации. Объем аэростата с лопастями (1) подбирается исходя из массы полезной нагрузки, необходимой для использования на заданной высоте.
Изобретение работает следующим образом: под воздействием воздушных потоков начинает раскручиваться аэростат с лопастями (1). Вращательный момент от вращения через трос аэростата (2) передается на ротор (3) электрогенератора для РЛС (4) и раскручивает его.
Вырабатываемая электроэнергия обеспечивает работу РЛС (6), видеокамеры и тепловизора (9), ведущих круговое наблюдение за надводной обстановкой в месте установки системы. При обнаружении каких-либо объектов производится обработка информации вычислительном комплексом (22) и осуществляется оповещение и передача характеристик и параметров движения объекта через систему приема и передачи данных (11) на пункт управления.
При получении избыточной электроэнергии генерируемой электрогенератором для РЛС (4), она подается другим потребителям или накапливается в аккумуляторной батарее (21). Эту электроэнергию потребители в устройстве гидроакустического обнаружения (13) получают по тросу от РЛС (7). Также они получают электроэнергию от электрогенератора для системы гидроакустического обнаружения (14), который вырабатывает электроэнергию за счет вращения винтового пропеллера на роторе электрогенератора (16), приводимого в движение потоком воды из-за разницы давлений в разных слоях. Вращение винтового пропеллера на роторе электрогенератора (16) задает направление движению воды через вырезы в нижней части трубы (20), где вода находится под высоким давлением столба воды над ней. Поднимаясь по трубе (18), вода попадает в корпус устройства гидроакустического обнаружения (13) и через боковой вырез корпуса (17) выдавливает воду из устройства в слой с более низким давлением. После запуска электрогенератор (14) переводится в режим генерации электроэнергии для обеспечения потребностей системы и пополнения запасов электроэнергии в аккумуляторе (21).
Приборы системы гидроакустического обнаружения (12) анализируют акустические сигналы, получаемые от гидрофонов (19), и при обнаружении каких-либо объектов осуществляется обработка информации вычислительном комплексом (22), оповещение, и передача характеристик и параметров объекта через систему приема и передачи данных (11) на пункт управления.
Избыточная электроэнергия, вырабатываемая электрогенератором для системы гидроакустического обнаружения (14) также накапливается в аккумуляторной батарее (21) и расходуется в моменты максимального потребления при низкой генерации.
Система наблюдения за надводной и подводной обстановкой позволяет вести непрерывное наблюдение с воздуха за участками водной поверхности большой площади, эффективно использовать заложенные технические возможности, позволяет осуществлять обнаружение надводных и подводных целей, выдавая точные координаты, особенно при использовании нескольких взаимосвязанных систем, решать задачи охраны протяженных морских участков. Система способна автономно осуществлять наблюдение за надводной и подводной обстановкой и своевременно оповещать об обнаруженных объектах, эксплуатироваться длительное время, за счет возможности пополнять электроэнергию в процессе эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство гидроакустического обнаружения с возобновляемым источником электропитания | 2021 |
|
RU2765274C1 |
| Гибридная аэромобильная система воздушного наблюдения | 2023 |
|
RU2827131C1 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2018 |
|
RU2735447C2 |
| Автономное устройство обнаружения нарушителей на морском участке границы | 2022 |
|
RU2785655C1 |
| ПОДВИЖНОЙ ПОСТ ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ "ЗВЕРОБОЙ-М" | 2014 |
|
RU2563699C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| АВТОНОМНЫЙ ПОСТ ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2018 |
|
RU2703167C1 |
| Мобильный быстроразвёртываемый автономный пост технического наблюдения для контроля обстановки на прибрежных и сухопутных участках и территориях | 2021 |
|
RU2776956C1 |
| Автономный пост технического наблюдения для контроля обстановки на охраняемой территории | 2016 |
|
RU2634761C1 |
| Интеллектуальная сетевая система мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях | 2019 |
|
RU2715158C1 |
Изобретение относится к области устройств наблюдения. Техническим результатом является обеспечение возможности автономно и длительное время осуществлять наблюдение за надводной и подводной обстановкой и своевременно обнаруживать, оповещать и выдавать характеристики и параметры движения об обнаруженных объектах, а при необходимости, перемещать средства обнаружения на новый участок акватории. Вращающийся аэростат с лопастями связан тросом с электрогенератором, генерирующим энергию для обеспечения электропитания потребителей и подзарядки аккумулятора. Электрогенератор расположен в верхней части радиопрозрачного корпуса, внутри которого находится радиолокационная станция, а снизу располагаются видеокамера и тепловизор. В нижней части радиопрозрачный корпус соединен тросом с электролебедкой, находящейся в корпусе устройства гидроакустического обнаружения. Трос удерживает конструкцию на определенной высоте, внутри него проложена кабельная линия, также на тросе расположена антенна системы приема и передачи данных. В верхней части устройства гидроакустического обнаружения расположены приборы системы гидроакустического обнаружения, системы приема и передачи данных, вычислительный комплекс, насос с датчиком давления, электрогенератор с пропеллером, а в нижней части он соединен с трубой, которая при помощи аккумулятора зафиксирована в грунте. 1 ил.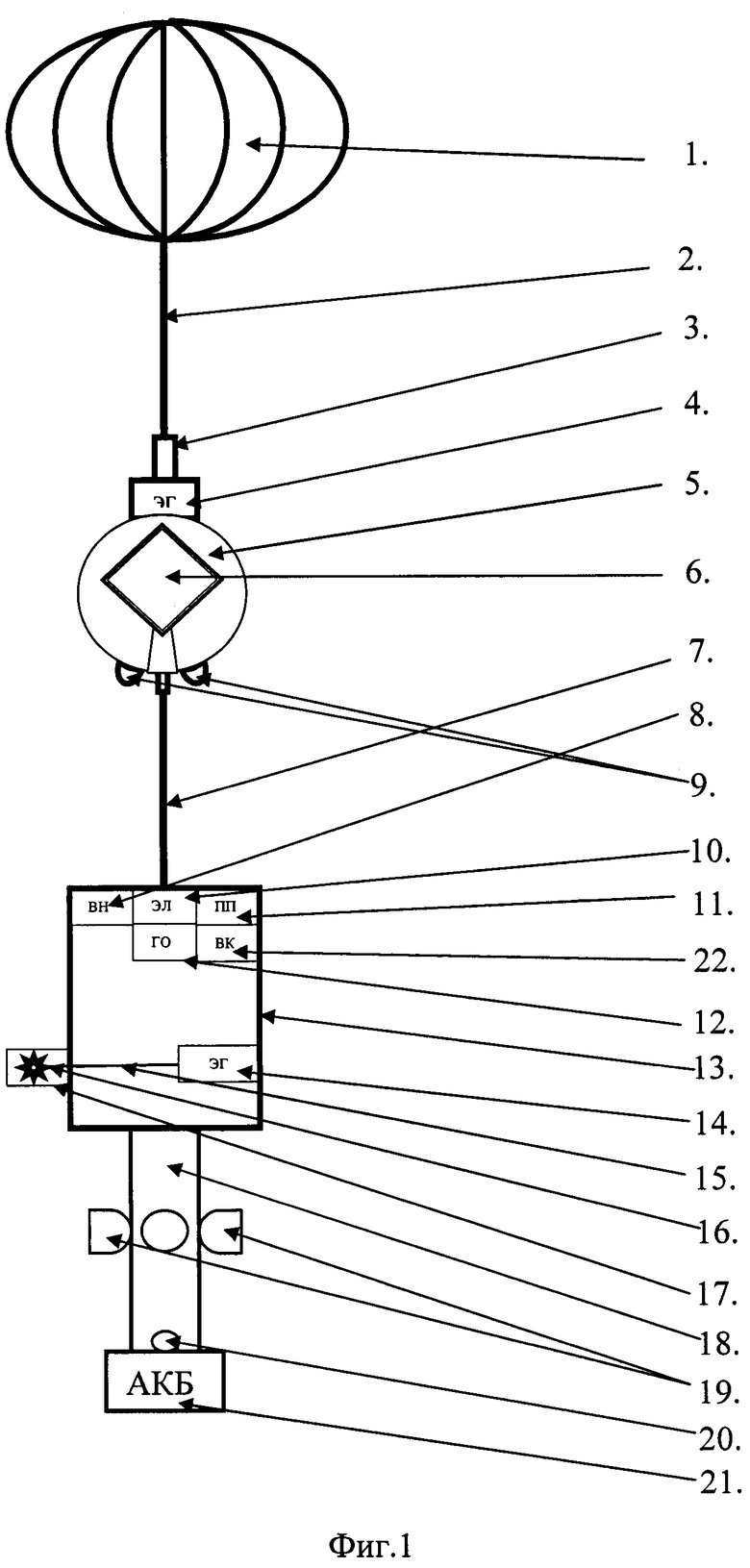
Система наблюдения за надводной и подводной обстановкой, содержащая видеокамеру, тепловизор и радиолокационную станцию, систему приема и передачи данных по радиоканалу, ветрогенератор и аккумуляторную батарею, отличающаяся тем, что радиолокационная станция расположена в радиопрозрачном корпусе и удерживается на заданной высоте с помощью вращающегося аэростата, имеющего лопасти, в верхней части радиопрозрачного корпуса расположен электрогенератор, к ротору которого присоединен трос от аэростата, в нижней части радиопрозрачный корпус соединен тросом с электролебедкой, находящейся в корпусе устройства гидроакустического обнаружения, выполненном в виде полупогруженного в воду цилиндра, где в верхней части расположены приборы системы гидроакустического обнаружения, системы приема и передачи данных, вычислительный комплекс, воздушный насос с датчиком давления, электрогенератор с жестко закрепленным на роторе винтовым пропеллером, установленным в боковом вырезе корпуса, нижняя часть корпуса соединена с трубой меньшего диаметра, на ней расположены гидрофоны системы гидроакустического обнаружения, труба имеет вырезы и при помощи груза, в роли которого выступает аккумуляторная батарея, зафиксирована на грунте.
| Устройство гидроакустического обнаружения с возобновляемым источником электропитания | 2021 |
|
RU2765274C1 |
| Аэростатная система наблюдения | 2021 |
|
RU2761326C1 |
| МОБИЛЬНАЯ БЫСТРОРАЗВЕРТЫВАЕМАЯ СИСТЕМА ОБНАРУЖЕНИЯ ДЛЯ ДИСТАНЦИОННОГО ФОРМИРОВАНИЯ РУБЕЖЕЙ | 2021 |
|
RU2769808C1 |
| WO 2019035877 A2, 21.02.2019 | |||
| ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ И ПИЩЕВАЯ КОМПОЗИЦИЯ ДЛЯ ПРОФИЛАКТИКИ НАРУШЕНИЙ МОТОРНОЙ ФУНКЦИИ ЖЕЛУДОЧНО-КИШЕЧНОГО ТРАКТА ИЛИ УМЕНЬШЕНИЯ СИМПТОМОВ ТАКИХ НАРУШЕНИЙ | 2012 |
|
RU2568851C2 |
| WO 2021216159 A2, 28.10.2021. | |||

