ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к навигационной системе для обеспечения навигационных направлений, содержащей:
навигационное устройство, содержащее корпус, снабженный принимающей частью, имеющей внутреннюю поверхность, снабженную соединительным элементом первого типа соединения; систему стыковки, выполненную с возможностью размещения обеспеченного навигационного устройства, причем система стыковки содержит выступающую часть, снабженную соединительным элементом второго типа соединения, причем соединительный элемент второго типа соединения выполнен для соединения с соединительным элементом первого типа соединения. Также настоящее изобретение относится к приборной панели, содержащей систему стыковки, подходящую для такой навигационной системы, транспортному средству, содержащему такую навигационную систему, навигационному устройству, подходящему для использования такой навигационной системы, системе стыковки, подходящей для использования в такой навигационной системе, и способу формирования такой навигационной системы.
УРОВЕНЬ ТЕХНИКИ
Навигационные устройства предшествующего уровня техники, основанные на GPS (Глобальная Система Позиционирования), хорошо известны и широко используются в качестве автомобильных навигационных систем. Такое основанное на GPS навигационное устройство относится к вычислительному устройству, которое функционально связано с внешним (или внутренним) GPS приемником и может определить его глобальное положение. Кроме того, вычислительное устройство может определить маршрут между начальным адресом и адресом назначения, которые могут быть введены пользователем вычислительного устройства. Обычно вычислительное устройство обеспечивают программными средствами для вычисления “лучшего” или “оптимального” маршрута между положениями начального адреса и адреса назначения из базы данных карты. “Лучший” или “оптимальный” маршрут определяется на основе заданных критериев и не обязательно должен быть самым быстрым или самым коротким маршрутом.
Навигационное устройство обычно может быть установлено на приборную панель транспортного средства, но также может быть сформировано в виде части бортового компьютера транспортного средства или автомобильного радиоприемника. Навигационное устройство может быть также карманной системой, такой как PDA (или ее частью).
Используя позиционную информацию, извлеченную из GPS приемника, вычислительное устройство может определять его положение через регулярные интервалы и может отображать текущее положение транспортного средства для пользователя. Навигационное устройство может также содержать запоминающие устройства для хранения данных карты и дисплей для отображения выбранной части данных карты.
Также оно может обеспечить инструкции по навигации по определенному маршруту с помощью соответствующих навигационных направлений, отображаемых на дисплее и/или генерируемых в виде звуковых сигналов из динамика (например, “повернуть налево через 100 м”). Графика, изображающая действия, которые должны быть выполнены (например, левая стрелка, показывающая предстоящий поворот налево), может отображаться в строке состояния и также накладываться на соответствующие перекрестки/повороты и т.д. на самой карте.
Известно обеспечение автомобильных навигационных систем возможностью позволять водителю во время передвижения вдоль вычисленного навигационной системой маршрута инициировать повторное вычисление маршрута. Это полезно, когда транспортное средство поставлено перед строительными работами или серьезным затором.
Также известно обеспечение пользователя возможностью выбирать тип алгоритма вычисления маршрута, используемого навигационным устройством, выбирая, например, между 'Нормальным' режимом и 'Быстрым' режимом (который вычисляет маршрут за самое короткое время, но не анализирует так много альтернативных маршрутов как Нормальный режим).
Также известно, что оно позволяет вычислить маршрут при заданных пользователем критериях; например пользователь может предпочесть, чтобы устройство выбрало живописный маршрут. Программные средства устройства затем вычисляют различные маршруты и более положительно рассматривают те маршруты, которые включают в себя наибольшее количество точек интереса (известных как POI), отмеченных, например, как живописные красивые места.В настоящее время навигационные устройства являются объектами воровства. Для предотвращения этого навигационное устройство может быть удалено из системы стыковки. В настоящее время соединение системы стыковки и навигационного устройства требует точного расположения обеих структур по отношению друг к другу. Тем не менее, частое соединение и разъединение системы стыковки и навигационного устройства при многочисленных неидеальных условиях, например передвижении по тряской дороге, соединение (разъединение) в условиях плохого освещения и т.д., увеличивает шансы повреждения соединительных элементов обеих структур.
КРАТКОЕ ОПИСАНИЕ
В воплощении представленной здесь навигационной системы выступающая часть содержит внешнюю поверхность с формой, по существу, подобной, по меньшей мере, части внутренней поверхности принимающей части навигационного устройства, и принимающая часть может скользить вдоль траектории над внешней поверхностью, причем траектория определяется формой как внутренней поверхности принимающей части навигационного устройства, так и внешней поверхности выступающей части системы стыковки, и траектория такова, что соединительный элемент первого типа соединения направляется к соединительному элементу второго типа соединения для соединения. Примеры элементов типа соединения включают в себя соединительный элемент типа разъем-вилка и соединительный элемент типа разъем-розетка.
В этом воплощении внешняя поверхность имеет выпуклую форму, а внутренняя поверхность принимающей части навигационного устройства имеет вогнутую форму.
В воплощении система стыковки содержит опорную конструкцию, и выступающая часть системы стыковки установлена с возможностью вращения на опорную конструкцию. Примеры опорных конструкций включают в себя присоску и кликерную пружину. Опорная конструкция может быть выполнена с возможностью размещения кабеля.
Изобретение дополнительно относится к приборной панели, содержащей систему стыковки, подходящую для навигационной системы в одном из вышеупомянутых воплощений.
Изобретение дополнительно относится к транспортному средству, содержащему навигационную систему в одном из вышеупомянутых воплощений.
Изобретение дополнительно относится к навигационному устройству, подходящему для использования в навигационной системе в одном из вышеупомянутых воплощений.
Изобретение дополнительно относится к системе стыковки, подходящей для использования в навигационной системе в одном из вышеупомянутых воплощений.
Наконец, изобретение относится к способу формирования навигационной системы, причем способ содержит:
- обеспечивают навигационное устройство, содержащее корпус, снабженный принимающей частью, имеющей внутреннюю поверхность, снабженную соединительным элементом первого типа соединения;
- обеспечивают систему стыковки, выполненную с возможностью размещения навигационного устройства, причем система стыковки содержит выступающую часть, снабженную соединительным элементом второго типа соединения, причем соединительный элемент второго типа соединения выполнен для соединения с соединительным элементом первого типа соединения, и выступающая часть содержит внешнюю поверхность с формой, по существу, подобной, по меньшей мере, части внутренней поверхности принимающей части навигационного устройства;
- принимающая часть скользит вдоль траектории над внешней поверхностью, причем траектория определяется формой как внутренней поверхности принимающей части навигационного устройства, так и внешней поверхности выступающей части системы стыковки, и траектория такова, что соединительный элемент первого типа соединения, по существу, направляют к соединительному элементу второго типа соединения для соединения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее, только в качестве примера, будут описаны воплощения со ссылкой на сопроводительные схематические чертежи, на которых соответствующие ссылочные позиции обозначают соответствующие части и на которых:
- Фигура 1 схематически изображает схематическую блок-схему навигационного устройства,
- Фигура 2 схематически изображает схематический вид спереди навигационного устройства,
- Фигуры 3а-е схематически изображают первый принцип соединения согласно воплощениям настоящего изобретения;
- Фигуры 4а, 4b схематически изображают вид снизу и вид сбоку соответственно навигационного устройства;
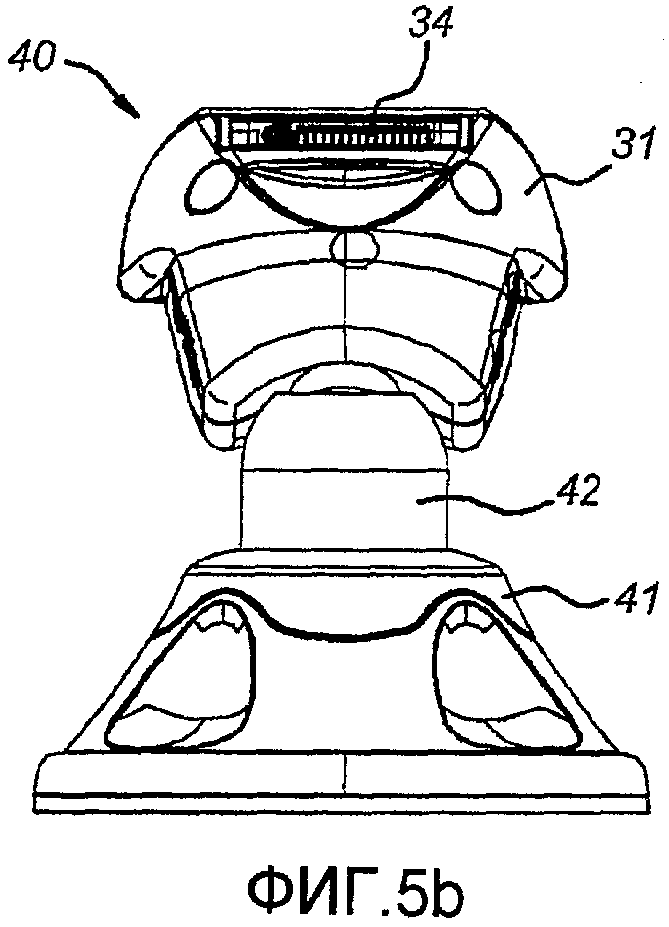
- Фигуры 5а, 5b схематически изображают вид сбоку и вид снизу системы стыковки согласно воплощению настоящего изобретения;
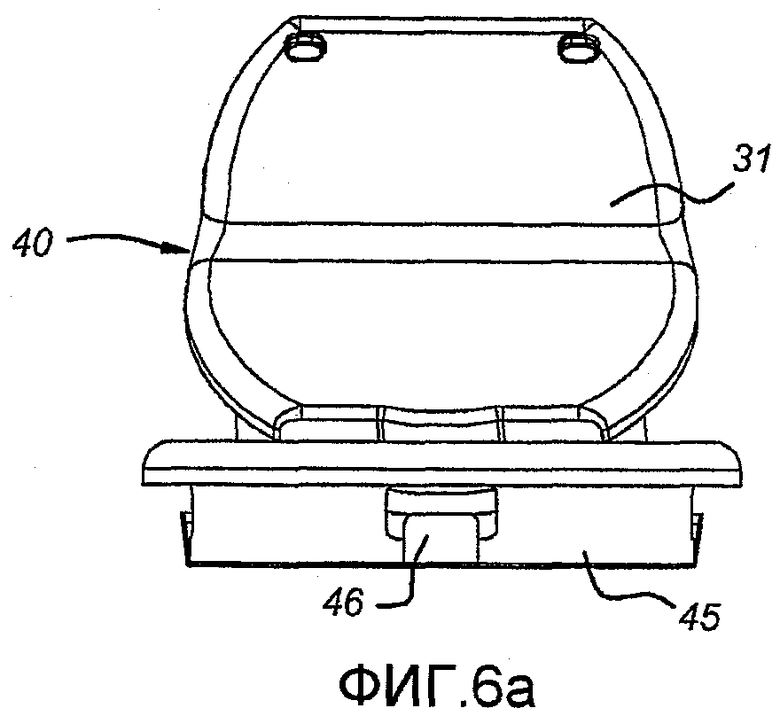
- Фигура 6а схематически изображает вид спереди системы стыковки согласно другому воплощению настоящего изобретения в “закрытом” положении;
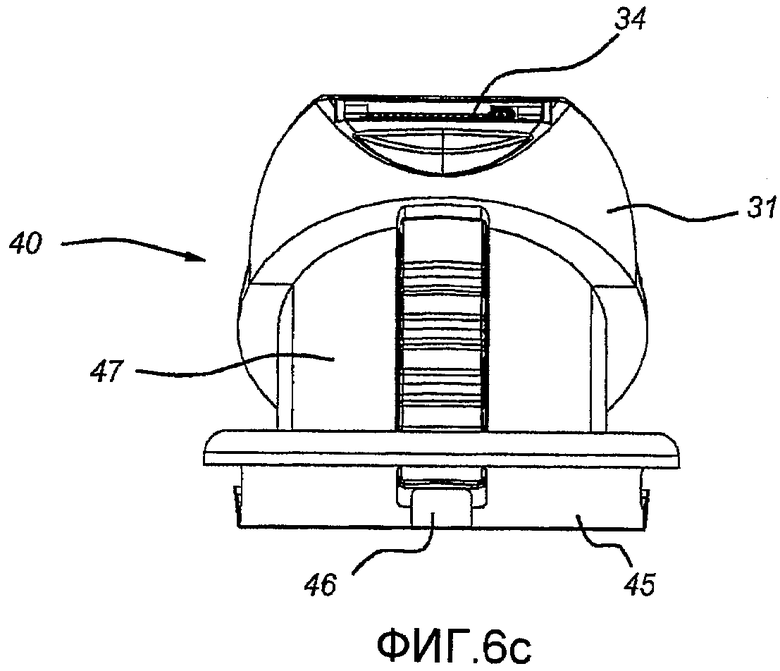
- Фигуры 6b, 6c схематически изображают вид сбоку и вид спереди соответственно системы стыковки, изображенной на фигуре 6а, в “открытом” положении;
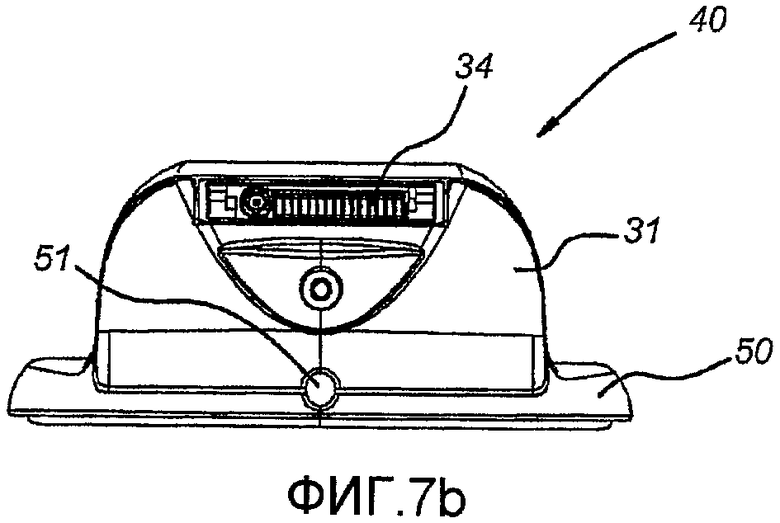
- Фигуры 7а, 7b схематически изображают вид сбоку и вид спереди соответственно системы стыковки согласно еще одному другому воплощению настоящего изобретения;
- Фигуры 8а, 8b, 8c схематически изображают второй принцип соединения согласно воплощениям настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Фигура 1 показывает схематическую блок-схему воплощения навигационного устройства 10, содержащего элемент 11 процессора для выполнения арифметических операций. Элемент 11 процессора выполнен с возможностью взаимодействия с запоминающими устройствами, которые хранят команды и данные, такими как жесткий диск 12, Постоянное Запоминающее Устройство (ROM) 13, Электрически Стираемое Программируемое Постоянное Запоминающее Устройство (EEPROM) 14 и Оперативное Запоминающее Устройство (RAM) 15. Запоминающие устройства могут содержать данные 22 карты. Эти данные карты могут быть двухмерными данными карты (широтой и долготой), но также они могут содержать третье измерение (высоту). Данные карты могут дополнительно содержать дополнительную информацию, такую как информация о бензозаправочных/газозаправочных станциях, точках интереса. Данные карты могут также содержать информацию о форме зданий и объектов вдоль дороги.
Элемент 11 процессора может быть также выполнен с возможностью взаимодействия с одним или более устройством ввода, таким как клавиатура 16 и мышь 17. Клавиатурой 16 может быть, например, виртуальная клавиатура, обеспеченная на дисплее 18, который является сенсорным экраном. Элемент 11 процессора может дополнительно быть выполнен с возможностью взаимодействия с одним или более устройством вывода, таким как дисплей 18, динамик 29 и одно или более считывающее устройство 19 для чтения, например дискет 20 или компакт-дисков 21. Дисплеем 18 может быть традиционный компьютерный дисплей (например, LCD) или может быть дисплей проекционного типа, такой как дисплей типа, отображающего данные на лобовом стекле, используемый для проектирования данных измерительных приборов на ветровое или лобовое стекло автомобиля. Дисплеем 18 может быть также дисплей, выполненный с возможностью функционирования в качестве сенсорного экрана, который позволяет пользователю вводить команды и/или информацию, касаясь дисплея 18 своим пальцем.
Динамик 29 может быть сформирован как часть навигационного устройства 10. В случае, когда навигационное устройство 10 используется в качестве автомобильного навигационного устройства, навигационное устройство 10 может использовать динамики автомобильного радиоприемника, бортового компьютера и тому подобного.
Элемент 11 процессора может быть дополнительно выполнен с возможностью взаимодействия с устройством 23 позиционирования, таким как GPS приемник, который обеспечивает информацию о положении навигационного устройства 10. Согласно этому воплощению устройство 23 позиционирования является основанным на GPS устройством 23 позиционирования. Тем не менее, понятно, что навигационное устройство 10 может реализовывать любой тип технологии позиционирования и не ограничивается GPS. Следовательно, оно может быть реализовано с использованием GNSS (глобальной навигационной спутниковой системы) другого типа, такого как европейская система Galileo. Также оно не ограничено спутниковыми системами определения положения/скорости, но может в равной степени применяться с использованием наземных радиомаяков или системы другого типа, которая дает возможность устройству определять свое географическое положение.
Тем не менее, следует понимать, что может быть обеспечено большее количество запоминающих устройств, устройств ввода и считывающих устройств, известных специалистам в данной области техники. Кроме того, одно или более из них может быть физически расположено удаленно от элемента 11 процессора, если требуется. Элемент 11 процессора показан как один блок, тем не менее, он может содержать несколько устройств обработки, которые работают параллельно или ими управляет один главный процессор, которые могут быть расположены удаленно друг от друга, как известно специалистам в данной области техники.
Навигационное устройство 10 показано в виде компьютерной системы, но оно может быть любой обрабатывающий сигнал системой с аналоговой и/или цифровой, и/или программной технологией, выполненной с возможностью выполнения обсуждаемых здесь функций. Должно быть понятно, что хотя навигационное устройство 10 показано на Фиг.1 в виде множества компонент, навигационное устройство 10 может быть сформировано в виде единичного устройства.
Навигационное устройство 10 может использовать навигационные программные средства, такие как навигационные программные средства из TomTom B.V., называемые Navigator. Программные средства Navigator могут работать на PDA устройстве под управлением Pocket PC c сенсорным экраном (т.е. управляемым стило), таком как Compaq iPaq, а также на устройствах, которые имеют встроенный GPS приемник 23. Система объединенных PDA и GPS приемника спроектирована для использования в качестве навигационной системы в транспортном средстве. Воплощения могут быть также реализованы при любом другом выполнении навигационного устройства 10, такого как навигационное устройство со встроенным GPS приемником/компьютером/дисплеем или устройство, спроектированное для использования не в транспортном средстве (например, для пешеходов) или в транспортных средствах, отличных от автомобилей (например, самолетах).
Фигура 2 изображает навигационное устройство 10, описанное выше.
Программные средства Navigator при выполнении в навигационном устройстве 10 заставляют навигационное устройство 10 отображать экран в нормальном навигационном режиме на дисплее 18, как показано на Фиг.2. Этот вид может обеспечить инструкции по передвижению, используя комбинацию текста, символов, голосового управления и движущейся карты. Ключевым элементом пользовательского интерфейса являются следующее: трехмерная карта занимает большую часть экрана. Заметим, что карта может быть также показана в виде двухмерной карты.
Карта показывает положение навигационного устройства 10 и его непосредственное окружение, повернутое таким образом, чтобы направление, в котором двигается навигационное устройство 10, было всегда “вверх”. Поперек нижней четверти экрана может двигаться строка 2 состояния. Текущее положение навигационного устройства 10 (определяемое самим навигационным устройством 10 с использованием традиционной пеленгации GPS) и его ориентация (вывод о которой делается на основе его направления перемещения) изображаются стрелкой 3 положения.
Маршрут 4, вычисленный устройством (с использованием алгоритмов вычисления маршрута, хранящихся в запоминающих устройствах 11, 12, 13, 14, 15, применяемых к данным карты, хранящимся в базе данных карты в запоминающих устройствах 11, 12, 13, 14, 15), показан в виде затемненного пути. На маршруте 4 все основные действия (например, углы поворота, перекрестки, участки дороги с круговым движением и т.д.) схематически изображены стрелками 5, наложенными на маршрут 4.
Строка 2 состояния также включает в себя в своей левой части схематическую иконку, изображающую следующее действие 6 (здесь поворот налево). Строка 2 состояния также показывает расстояние до следующего действия (т.е. до поворота направо - здесь 50 метров), извлеченное из базы данных полного маршрута, вычисленного устройством (т.е. списка всех дорог и связанных с ними действий, определяющих маршрут, который должен быть выбран). Строка 2 состояния также показывает название текущей улицы 8, расчетное время 9 до прибытия (здесь 2 минуты и 40 секунд), действительное расчетное время 25 (11,36) и расстояние 26 до пункта назначения (1,4 км). Строка 2 состояния может дополнительно показывать дополнительную информацию, такую как уровень сигнала GPS в стиле индикатора уровня сигнала мобильного телефона.
Как уже упоминалось, навигационное устройство может содержать устройства ввода, такие как сенсорный экран, которые позволяют пользователям вызвать навигационное меню (не показано). Из этого меню можно инициировать или управлять другими навигационными функциями. Возможность выбора навигационных функций из экрана меню, которые очень просто вызвать (например, от дисплея карты до экрана меню один шаг), значительно упрощает взаимодействие с пользователем и делает его более быстрым и легким. Навигационное меню включает в себя возможность для пользователя ввести пункт назначения.
Действительная физическая структура самого навигационного устройства 10 может, по существу, не иметь отличий от любого традиционного карманного компьютера, кроме встроенного GPS приемника 23 или данных GPS, подаваемых внешним GPS приемником. Следовательно, запоминающие устройства 12, 13, 14, 15 хранят алгоритмы вычисления маршрута, базу данных карты и программное обеспечение пользовательского интерфейса; элемент 12 процессора интерпретирует и обрабатывает входные данные пользователя (например, использующего сенсорный экран для ввода начального адреса и адреса назначения и всех других управляющих входных данных) и использует алгоритмы вычисления маршрута для вычисления оптимального маршрута. 'Оптимальный' маршрут может иметь отношение к таким критериям как наикратчайшее время или наикратчайшее расстояние или некоторые другие связанные с пользователем факторы.
Более конкретно, пользователь вводит свое начальное положение и требуемый пункт назначения в навигационные программные средства, выполняемые в навигационном устройстве 10, используя обеспеченные устройства ввода, такие как сенсорный экран 18, клавиатура 16 и т.д. Пользователь затем выбирает способ, которым будет вычислен маршрут передвижения: предлагаются различные режимы, такие как 'быстрый' режим, который вычисляет маршрут очень быстро, но маршрут может быть не самым коротким; 'полный' режим, проверяет все возможные маршруты и определяет самый короткий, но занимает больше времени на вычисление и т.д. Возможны другие варианты выбора, когда пользователь определяет маршрут, который является живописным, например проходит через наибольшее количество POI (точек интереса), отмеченных как знаменитые, красивые виды, или проходит через наибольшее количество POIs, возможно интересных детям, или использует наименьшее количество перекрестков и т.д.
Сами дороги описаны в базе данных карты, которая является частью навигационного программного обеспечения (или, в другом случае, к которой оно имеет доступ), выполняемого в навигационном устройстве 10, в виде линий, т.е. векторов (например, начальная точка, конечная точка, направление для дороги, причем вся дорога состоит из многих сотен таких участков, каждый из которых единственным образом определен параметрами направления, начальной точки/конечной точки). Карта в таком случае является набором таких дорожных векторов, плюс точки интереса (POIs), плюс названия дорог, плюс другие географические признаки, такие как границы парка, границы реки и т.д., которые все определены на основе векторов. Все признаки карты (например, дорожные векторы, POIs и т.д.) определены в системе координат, которая соответствует или относится к системе координат GPS, дающей возможность расположить местоположение устройства, определенного системой GPS, на соответствующей дороге, показанной на карте.
Вычисление маршрута использует комплексные алгоритмы, которые являются частью навигационного программного обеспечения. Алгоритмы применяются к посчитанному большому количеству возможных различных маршрутов. Навигационное программное обеспечение затем оценивает их по заданным пользователем критериям (или значениям устройства по умолчанию), например сканирование в полном режиме, живописный маршрут, музеи прошлого и отсутствие систем видеофикции нарушений ПДД. Маршрут, который наиболее соответствует заданным критериям, затем вычисляется элементом 11 процессора и затем сохраняется в базе данных в запоминающих устройствах 12, 13, 14, 15 в виде последовательности векторов, названий дорог и действий, которые необходимо совершить в конечных точках вектора (например, соответствующих предварительно определенным расстояниям вдоль каждой дороги маршрута, например, через 100 метров повернуть налево на улицу x).
Навигационное устройство 10 может быть отделено от системы стыковки. В результате этой отделимости навигационное устройство 10 может быть отсоединено от системы стыковки, которая расположена, например, в транспортном средстве, и соединено с другой системой стыковки в другом местоположении, например на рабочем столе при соединении с настольным компьютером. Система стыковки может содержать источник питания или сетевое соединение. Навигационное устройство 10 может получать энергию при соединении навигационного устройства 10 и системы стыковки или, в случае, когда навигационное устройство 10 само содержит источник питания, такой источник может быть “пополнен”. Кроме того, соединение навигационного устройства 10 и системы стыковки может обеспечить сетевое соединение, такое как соединение с Интернет.
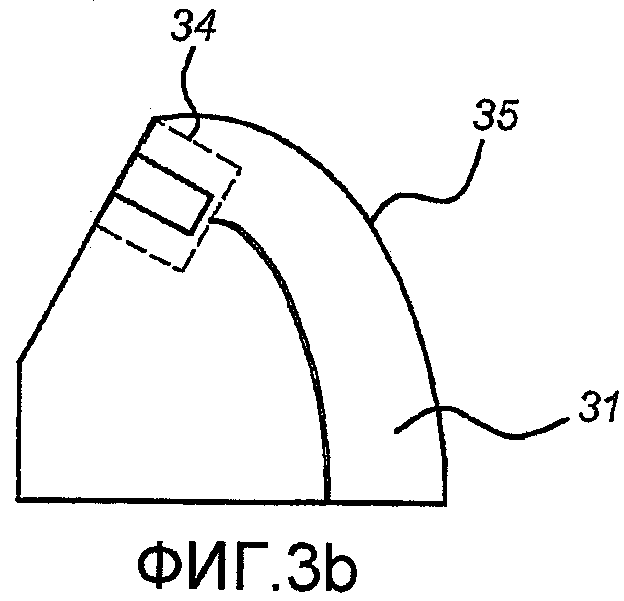
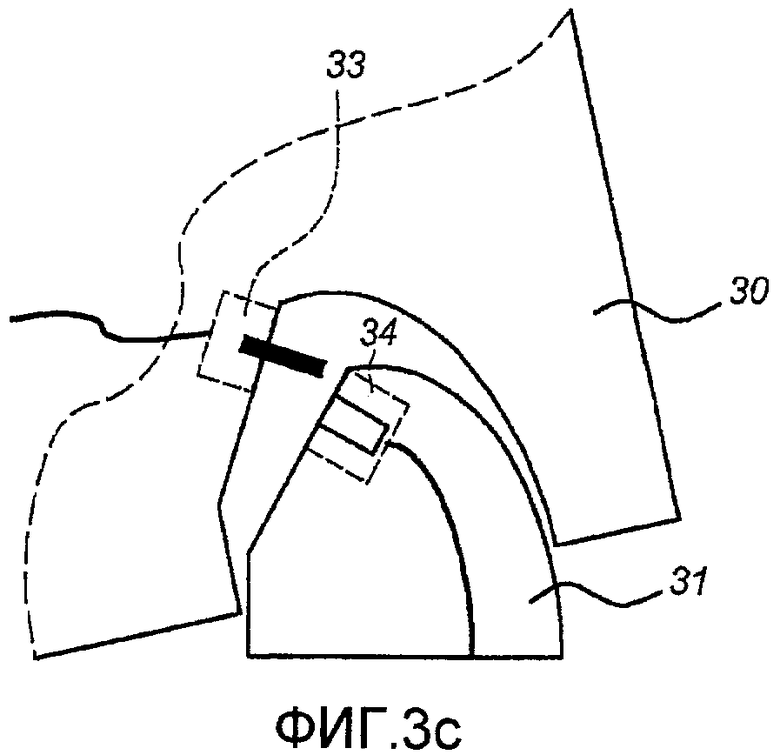
Фигуры 3а-е схематически изображают первый принцип соединения согласно воплощениям настоящего изобретения. Фигуры 3а и 3b схематически изображают виды сечений принимающей части 30 навигационного устройства 10 и выступающей части 31 системы стыковки соответственно, когда эти две структуры не соединены. Материалом, который может быть использован для шасси навигационного устройства 10, является алюминиевый сплав. Система стыковки может быть сконструирована из пластика поликарбоната - акрилонитрила бутадиен стирола (PC-ABS).
Для соединения навигационное устройство 10 содержит корпус, снабженный принимающей частью 30, т.е. полостью 32. Полость имеет внутреннюю поверхность, снабженную соединительным элементом 33. Аналогично, выступающая часть 31 содержит соединительный элемент 34. Соединительный элемент 33 и соединительный элемент 34 являются комплементарными, т.е. соединительные элементы 33, 34 выполнены с возможностью соединения друг с другом. На фигурах 3а, с-е соединительный элемент 33 имеет тип соединения типа разъем-вилка, тогда как соединительный элемент 34 на фигурах 3b-e имеет тип соединения типа разъем-розетка.
Этот выбор типа соединения предпочтителен в окружающей среде транспортного средства по причинам безопасности. Система стыковки может присутствовать в транспортном средстве без навигационного устройства, соединенного с ней. Чтобы минимизировать риски, связанные с повреждениями, которые вызывают выступающие структуры или их части, необходимо избегать острых краев или тому подобного насколько это возможно. Соединительный элемент типа соединения типа разъем-розетка не выступает в пространство так явно как соединительный элемент типа соединения типа разъем-вилка.
Тем не менее, необходимо понимать, что в других воплощениях типы соединения можно поменять местами. Выступающая часть 31 системы стыковки содержит направляющую внешнюю поверхность 35. Полость 32 навигационного устройства 10 имеет внутреннюю поверхность, которая является комплементарной с направляющей внешней поверхностью 35 системы стыковки. В воплощении направляющая внешняя поверхность 35 системы стыковки имеет выпуклую форму, а внутренняя поверхность полости 32 навигационного устройства 10 имеет вогнутую форму.
Фигура 3с схематически изображает навигационное устройство 10 и выступающую часть 31 системы стыковки на стадии соединения соединительных элементов 33, 34 друг с другом. В течение процесса соединения часть внутренней формы скользит вдоль траектории над выступающей частью 31 системы стыковки, при этом находясь в контакте с направляющей внешней поверхностью 35. Таким образом, соединительный элемент 33 направляется к соединительному элементу 34 для соединения. Траектория определяется формой внутренней поверхности полости 32 навигационного устройства 10 вместе с комплементарной формой направляющей внешней поверхности 35 системы стыковки. В воплощении радиус выступающей части 31 больше 2,5 мм для соответствия требованиям некоторых европейских автомобильных законодательств.
Фигура 3d схематически изображает ситуацию, когда навигационное устройство 10 почти соединено со стыковочной системой. Полость 32 сейчас почти полностью занята выступающей частью 31 стыковочной системы. Кроме того, соединительный элемент 33 соединен, по существу, по одной линии с соединительным элементом 34. Оба соединительных элемента 33, 34 находятся в одной плоскости в момент, когда они сближены. Для дополнительного улучшения этого аспекта соединительный элемент 33 может быть снабжен, по меньшей мере, одной направляющей стойкой (не показана). Даже если навигационное устройство 10 соединено со стыковочной системой при нестабильных условиях, например при движении автомобиля по тряской дороге, навигационное устройство 10 может быть соединено со стыковочной системой без повреждения соединительных элементов 33, 34.
В итоге, фигура 3е схематически изображает соединенную сборку навигационного устройства 10 и выступающей части 31 системы стыковки. Внутренняя поверхность полости 32 навигационного устройства 10 и направляющая внешняя поверхность выступающей части 31 стыковочной системы могут быть точно сконструированы, чтобы предоставить достаточно места для расширения и сжатия материала, при этом все еще допуская нетрудную процедуру стыковки.
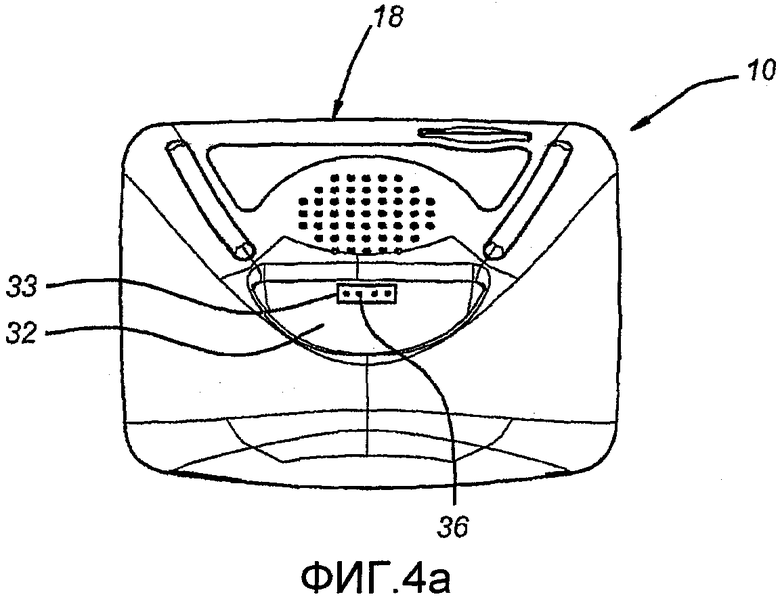
Фигуры 4а, 4b схематически изображают вид снизу и сбоку соответственно навигационного устройства 10, выполненного для соединения согласно принципу соединения, изображенному на фигурах 3а-е. На фигуре 4b полость 32 изображена пунктирными линиями. Хотя соединительный элемент 33 демонстрирует четыре соединительных штыря 36, необходимо понимать, что это число является произвольным. Соединительный элемент 33 может содержать большее или меньшее количество соединительных штырей 36 или, в случае соединительного элемента 33 типа разъема-розетки, соединительных отверстий.
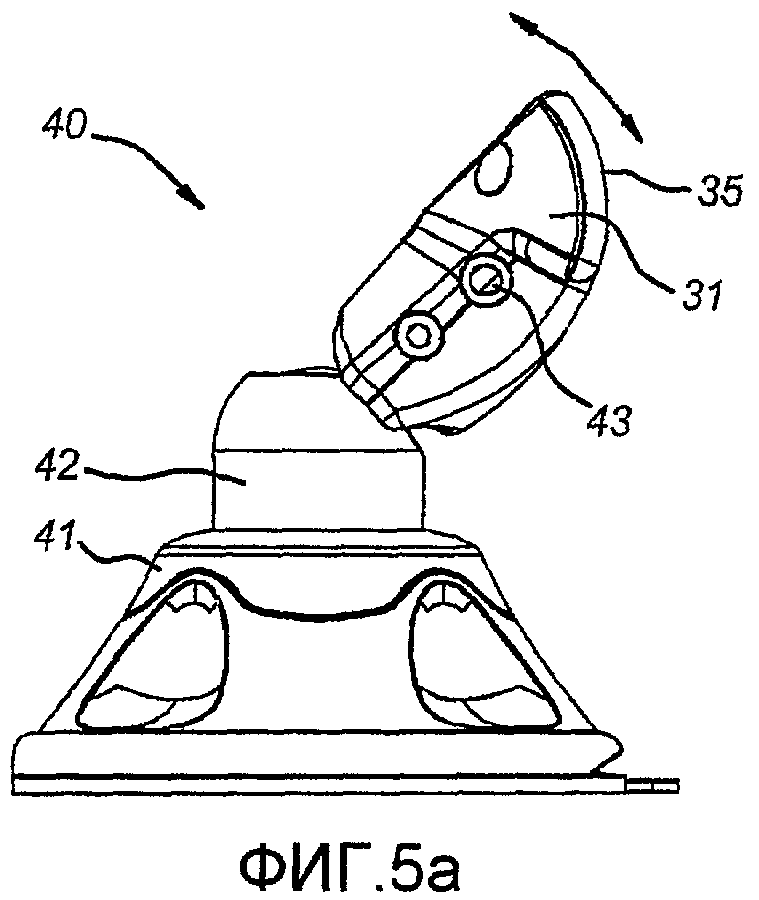
Фигуры 5а, 5b схематически изображают вид сбоку и спереди соответственно системы 40 стыковки согласно воплощению, выполненному для прикрепления с возможностью разъединения к, по существу, плоской поверхности (не показана), например окну автомобиля. Для этой цели система 40 стыковки по этому воплощению содержит присоску 41. Выступающая часть 31 системы 40 стыковки может быть установлена с возможностью вращения на опорной конструкции, т.е. непосредственно на присоске 41 или на опоре 42, которая, если присутствует, соединена с присоской 41. Возможность вращения выступающей части 31 позволяет пользователю настраивать ориентацию навигационной системы после соединения навигационного устройства 10 с системой 40 стыковки. Если выступающая часть 31 установлена на опору 42, дополнительная настройка ориентации навигационной системы может быть достигнута соединением с возможностью вращения опоры 42 с присоской 41. Настройки позволяют пользователю оптимизировать ориентацию дисплея 18 навигационного устройства 10. Чтобы сохранить оптимальное положение дисплея 18, соединения между выступающей частью 31 и опорой 42, а также между опорой 42 и присоской 41 или соединение между выступающей частью 31 и присоской 41 могут быть зафиксированы элементами фиксации, такими как болты 43 или тому подобное.
Фигура 6а схематически изображает схематический вид системы стыковки согласно воплощению, выполненному для интеграции в, по существу, плоскую поверхность, например приборную панель транспортного средства, в “закрытом” положении. Фигуры 6b, 6c схематически изображают вид сбоку и спереди соответственно системы стыковки, изображенной на фигуре 6а, в “открытом” положении.
В этом воплощении выступающая часть 31 системы 40 стыковки установлена с возможностью вращения на опорную конструкцию 45. Опорная конструкция 45 снова выполнена для соединения с возможностью разъединения с, по существу, плоской поверхностью (не показана), так чтобы она умещалась в подходящем углублении в этой поверхности. Для этой цели опорная конструкция 45 может содержать, по меньшей мере, одну кликерную пружину 46.
В “закрытом” положении, изображенном на фигуре 6а, только выступающая часть 31 системы 40 стыковки согласно этому воплощению выступает из, по существу, плоской поверхности. Тем не менее, для соединения навигационного устройства 10 с системой 40 стыковки может потребоваться больше пространства. Следовательно, выступающая часть 31 системы 40 стыковки может раскладываться в “открытое” положение, т.е. положение, изображенное на фигурах 6b, 6c. Траекторией между двумя вышеупомянутыми положениями можно механически управлять с помощью раскладывающего направляющего элемента 47. Чтобы предотвратить случайное передвижение между “закрытым” и “открытым” положениями, например вследствие мгновенного ускорения или поломки транспортного средства, выступающая часть 31 может быть зафиксирована в этих положениях способами, известными специалистам в данной области техники, например запирающим механизмом.
В случае, когда навигационное устройство 10 не соединено с системой 40 стыковки, система 40 стыковки предпочтительно находится в своем “закрытом” положении. В этом положении только относительно небольшая часть системы 40 стыковки выступает в окружающее пространство. Техника безопасности насколько это возможно поддерживает отсутствие таких выступающих частей и/или элементов.
Фигуры 7а, 7b схематически изображают вид сбоку и спереди соответственно системы 40 стыковки согласно воплощению, выполненному для соединения с внешним терминалом (не показан), например настольным компьютером. В этом воплощении выступающая часть 31 системы 40 стыковки установлена на опорную конструкцию 50. Опорное основание 50 может быть зафиксировано на плоской поверхности (не показана), например рабочем столе, но также может просто покоиться на этой поверхности. Система 40 стыковки может быть выполнена с возможностью размещения кабеля 51 способом, известным специалистам в данной области техники, для соединения системы 40 стыковки с внешним устройством, например настольным компьютером.
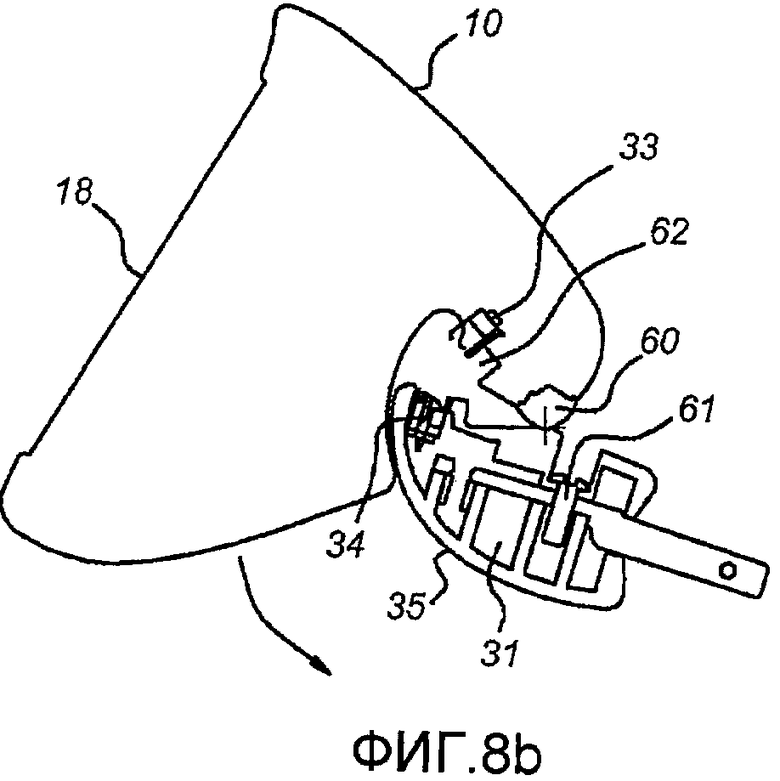
Фигуры 8а, 8b, 8c схематически изображают второй принцип соединения согласно воплощениям настоящего изобретения. В этом воплощении, снова, навигационное устройство 10 и выступающая часть 31 системы стыковки, показанные отдельно на фигуре 8а, соединены с использованием направляющей внешней поверхности 35 выступающей части 31, как изображено на фигуре 8а, для установления соединения между соединительными элементами 33, 34, как показано на фигуре 8с. При этом втором принципе соединения помимо соединительного элемента 33 навигационного устройства 10 используют дополнительное углубление или подрез 62. Дополнительное углубление 62 обеспечивает, что соединительные элементы 33, 34 удерживаются отдельно друг от друга до его сцепления с выступающей частью 31 системы стыковки. Это минимизирует риск повреждения соединительных элементов 33, 34.
На фигурах 8а-8с показана только выступающая часть 31. Она снова может быть соединена со стыковочной станцией посредством элементов фиксации, таких как болты 61 и тому подобное. Чтобы предотвратить износ возле точки вращения, изображенной на фигурах 8а-8с крестом из тонких линий, навигационное устройство 10 может быть снабжено буферным элементом 60, например резиновым буферным элементом.
Дополнительно, заметим, что ориентация углубления навигационного устройства 10 отлична от ориентации углубления 32 на фигуре 4b. Необходимо понимать, что показанная на фигурах 8а-с ориентация может быть также применена к углублению 32, т.е. углублению без дополнительного углубления 62. Дополнительно, углубление с дополнительным углублением 62, показанное на фигурах 8а-8с, может быть также ориентировано так, как показано на фигуре 4b.
Эксперименты с обычными соединительными элементами для навигационных систем показали, что хорошее выполнение может быть получено, если точка вращения находится приблизительно между 10-20 мм от центра соединительного элемента 33. В случае соединительного элемента типа разъем-вилка, т.е. одного или более соединительных штырей 36, размер штыря пропорционально влияет на вышеупомянутое расстояние, если угол, требуемый для прикрепления/открепления системы 40 стыковки и навигационного устройства 10, остается прежним.
Навигационное устройство 10 может быть соединено с системами 40 стыковки различных типов. Таким образом, например, возможно использование навигационного устройства 10 в транспортном средстве, например, используя воплощение, изображенное на фигурах 5а, 5b, отсоединение навигационного устройства 10 после прибытия в пункт назначения и последовательное соединение навигационного устройства 10 с системой 40 стыковки, как изображено на фигурах 7а, 7b, для планирования нового маршрута при взаимодействии с внешним устройством, например настольным компьютером. Благодаря направляющей внешней поверхности 35 выступающей части 31 систем 40 стыковки соединительные элементы 33, 34 в навигационном устройстве 10 и системах 40 стыковки соответственно подвергаются минимальному износу в результате регулярных соединений (разъединений) двух структур 10, 40.
Для обеспечения расположения друг относительно друга системы 40 стыковки и навигационного устройства 10 после полного сцепления может быть обеспечен выдвижной колышек. Выдвижным колышком может быть колышек типа дверной задвижки/замка, т.е. выдвижной/скользящий колышек на двери, который сцепляется с отверстием в дверном косяке, предотвращая вращение двери вокруг ее петель. Колышек может зацепляться через искривленные поверхности обеих структур 10, 40. Таким образом, например, тряская дорога оказывает минимальное влияние на сцепление двух соединительных элементов 33, 34.
Хотя выше были описаны конкретные воплощения изобретения, будет оценено, что изобретение может быть осуществлено на практике отличными от описанных способами. Например, изобретение может иметь форму компьютерной программы, содержащей одну или более последовательностей считываемых компьютером команд, описывающих раскрытый выше способ, или носителем хранения данных (например, полупроводниковым запоминающим устройством, магнитным или оптическим диском), имеющим такую компьютерную программу, сохраненную на нем. Специалистам в данной области техники понятно, что все компоненты программного обеспечения также могут быть сформированы в виде компонент аппаратного обеспечения.
Вышеприведенные описания предназначены для неограничивающих иллюстраций. Таким образом, специалистам в данной области техники очевидно, что могут быть сделаны модификации описанного изобретения без отклонения от объема формулы изобретения, изложенной ниже.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРТАТИВНОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО | 2007 |
|
RU2431802C2 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО И СПОСОБ ПРОКРУТКИ КАРТОГРАФИЧЕСКИХ ДАННЫХ, ОТОБРАЖАЕМЫХ В НАВИГАЦИОННОМ УСТРОЙСТВЕ | 2005 |
|
RU2417398C2 |
| НАВИГАЦИОННЫЙ УЗЕЛ, СКЛАДНОЙ ДЕРЖАТЕЛЬ И НАВИГАЦИОННЫЙ УЗЕЛ, ВКЛЮЧАЮЩИЙ В СЕБЯ УКАЗАННЫЙ ДЕРЖАТЕЛЬ | 2009 |
|
RU2490149C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2019 |
|
RU2704198C1 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО, ОТОБРАЖАЮЩЕЕ ИНФОРМАЦИЮ О ДВИЖЕНИИ | 2005 |
|
RU2354935C2 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО С АДАПТИВНЫМИ ИНСТРУКЦИЯМИ ПО НАВИГАЦИИ | 2006 |
|
RU2413927C2 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО С ИНФОРМАЦИЕЙ, ПОЛУЧАЕМОЙ ОТ КАМЕРЫ | 2005 |
|
RU2375756C2 |
| СПОСОБ ФОРМИРОВАНИЯ УЛУЧШЕННЫХ КАРТОГРАФИЧЕСКИХ ДАННЫХ ДЛЯ ИСПОЛЬЗОВАНИЯ В НАВИГАЦИОННЫХ УСТРОЙСТВАХ | 2007 |
|
RU2482540C2 |
| НАВИГАЦИОННАЯ СИСТЕМА (ВАРИАНТЫ) | 2004 |
|
RU2383056C2 |
| Телематический прибор | 2019 |
|
RU2736321C1 |









Изобретения относятся к навигационным системам. Навигационная система содержит навигационное устройство с корпусом, снабженным принимающей частью (30). Принимающая часть (30) имеет внутреннюю поверхность, снабженную соединительным элементом типа разъем-вилка (33). Навигационная система содержит систему стыковки, выполненную с возможностью размещения навигационного устройства. Система стыковки имеет выступающую часть (31), снабженную соединительным элементом типа разъем-розетка (34). Соединительный элемент второго типа соединения (34) выполнен для соединения с соединительным элементом первого типа соединения (33). Выступающая часть (31) имеет внешнюю поверхность с формой, подобной внутренней поверхности принимающей части (30) навигационного устройства. Принимающая часть (30) может скользить вдоль траектории над внешней поверхностью, причем траектория определяется формой как внутренней поверхности принимающей части (30) навигационного устройства, так и внешней поверхности выступающей части (31) системы стыковки. В частности, траектория такова, что соединительный элемент типа разъем-вилка (33) направляется к соединительному элементу типа разъем-розетка (34). Технический результат заключается в возможности удаления навигационного устройства из системы стыковки. 6 н. и 5 з.п. ф-лы, 8 ил.
1. Навигационная система для обеспечения навигационных направлений, содержащая навигационное устройство (10), содержащее корпус, снабженный принимающей частью (30), имеющей внутреннюю поверхность, снабженную соединительным элементом разъем-вилка (33); систему (40) стыковки, выполненную с возможностью размещения упомянутого навигационного устройства (10), причем упомянутая система (40) стыковки содержит выступающую часть (31), снабженную соединительным элементом типа разъем-розетка (34), причем упомянутый соединительный элемент типа разъем-розетка (34) выполнен для соединения с упомянутым соединительным элементом типа разъем-вилка (33); причем упомянутая выступающая часть (31) содержит внешнюю поверхность (35) с формой, по существу, подобной, по меньшей мере, части внутренней поверхности принимающей части (30) навигационного устройства (10), и упомянутая принимающая часть (30) может скользить вдоль траектории над упомянутой внешней поверхностью (35), причем упомянутая траектория определяется формой как внутренней поверхности принимающей части (30) навигационного устройства (10), так и внешней поверхности (35) выступающей части (31) системы (40) стыковки и упомянутая траектория такова, что упомянутый соединительный элемент типа разъем-вилка (33) направляется к соединительному элементу типа разъем-розетка соединения (34) для соединения.
2. Навигационная система по п.1, причем внешняя поверхность (35) имеет выпуклую форму, а внутренняя поверхность принимающей части (30) навигационного устройства (10) имеет вогнутую форму.
3. Навигационная система по п.1 или 2, причем упомянутая система (40) стыковки содержит опорную конструкцию (41, 42, 45, 50) и упомянутая выступающая часть системы стыковки установлена с возможностью вращения на упомянутой опорной конструкции (41, 42, 45, 50).
4. Навигационная система по п.3, причем упомянутая опорная конструкция (41, 42, 45, 50) содержит присоску (41) для выполнения соединения с возможностью разъединения с упомянутой, по существу, плоской поверхностью.
5. Навигационная система по п.3, причем упомянутая опорная конструкция (41, 42, 45, 50) содержит, по меньшей мере, одну кликерную пружину (46) для выполнения соединения с возможностью разъединения с упомянутой, по существу, плоской поверхностью.
6. Навигационная система по п.3, причем упомянутая опорная конструкция (41, 42, 45, 50) выполнена с возможностью размещения кабеля (51).
7. Приборная панель, содержащая систему (40) стыковки, подходящую для навигационной системы (10) по любому из предшествующих пунктов.
8. Транспортное средство, содержащее навигационную систему по любому из пп.1-6.
9. Навигационное устройство (10), подходящее для использования в навигационной системе по любому из пп.1-6.
10. Система (40) стыковки, подходящая для использования в навигационной системе по любому из пп.1-6.
11. Способ формирования навигационной системы, причем способ содержит: обеспечивают навигационное устройство (10), содержащее корпус, снабженный принимающей частью (30), имеющей внутреннюю поверхность, снабженную соединительным элементом разъем-вилка (33); обеспечивают систему (40) стыковки, выполненную с возможностью размещения упомянутого навигационного устройства (10), причем упомянутая система (40) стыковки содержит выступающую часть (31), снабженную соединительным элементом типа разъем-розетка (34), причем упомянутый соединительный элемент типа разъем-розетка (34) выполнен для соединения с упомянутым соединительным элементом типа разъем-вилка (33), и упомянутая выступающая часть (31) содержит внешнюю поверхность (35) с формой, по существу, подобной, по меньшей мере, части упомянутой внутренней поверхности принимающей части (30) навигационного устройства (10); упомянутая принимающая часть (30) скользит вдоль траектории над упомянутой внешней поверхностью (35), причем упомянутая траектория определяется формой как внутренней поверхности принимающей части (30) навигационного устройства (10), так и внешней поверхности (35) выступающей части (31) системы стыковки, и упомянутая траектория такова, что упомянутый соединительный элемент типа разъем-вилка (33), по существу, направляют к соединительному элементу типа разъем-розетка (34) для соединения.
| СПОСОБ ФОРМИРОВАНИЯ ДОМЕННОЙ ШИХТЫ | 2009 |
|
RU2412254C2 |
| WO 2007015641 A2, 08.02.2007 | |||
| СРЕДСТВО "ХЛОРФИЗ" ДЛЯ ЛЕЧЕНИЯ РИНИТА | 1994 |
|
RU2082405C1 |
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |

