Область техники, к которой относится изобретение
Настоящее изобретение относится к навигационному устройству, содержащему процессор и дисплей, процессор выполнен с возможностью отображать картографические данные на дисплее.
Также настоящее изобретение относится к способу прокрутки картографических данных, отображаемых в навигационном устройстве.
Уровень техники
Навигационные устройства предшествующего уровня техники, построенные на базе GPS (глобальной системы позиционирования), хорошо известны и широко используются в качестве автомобильных навигационных систем. Такое навигационное устройство, построенное на базе GPS, относится к вычислительному устройству, которое в функциональном соединении с внешним (внутренним) GPS-приемником способно определять собственную глобальную позицию. Кроме того, вычислительное устройство способно определять маршрут между начальным и конечным адресами, которые могут быть введены пользователем вычислительного устройства. В типичном варианте вычислительное устройство способно посредством программного обеспечения вычислять "наилучший" или "оптимальный" маршрут между местоположениями начального и конечного адресов из картографической базы данных. "Наилучший" или "оптимальный" маршрут определяется на основе предварительно определенных критериев и необязательно является самым быстрым или самым коротким маршрутом.
Навигационное устройство может в типичном варианте быть прикреплено на приборную доску транспортного средства, а также может быть реализовано как часть бортового компьютера транспортного средства или автомобильной аудиосистемы. Навигационное устройство также может быть (частью) носимой системой, например PDA.
Используя позиционную информацию, получаемую от GPS-приемника, вычислительное устройство может определять на регулярной основе собственную позицию и может отображать текущую позицию транспортного средства пользователю. Навигационное устройство может содержать устройства памяти для хранения картографических данных и дисплей для отображения выбранной части картографических данных.
Кроме того, оно может предоставлять инструкции, как следовать определенному маршруту посредством соответствующих навигационных указаний, отображаемых на дисплее и/или формируемых в качестве звуковых сигналов из динамиков (например, "поверните налево через 100 метров"). Графика, изображающая действия, которые должны быть выполнены (например, стрелка влево указывает поворот налево впереди), может быть отображена в строке состояния, а также может быть самостоятельно наложена на соответствующие развязки дорог/повороты и т.п. на карте.
Хорошо известна способность автомобильных навигационных систем предоставлять возможность водителю, когда он ведет автомобиль вдоль маршрута, вычисленного навигационной системой, инициировать повторное вычисление маршрута. Это полезно, когда на пути автомобиля встречаются дорожные работы или большой автомобильный затор.
Также хорошо известна способность предоставлять возможность пользователю выбирать тип алгоритма вычисления маршрута, применяемого навигационной системой, путем выбора, например, "нормального" режима и "быстрого" режима (который вычисляет маршрут в кратчайшее время, но не исследует множество альтернативных маршрутов, как в нормальном режиме).
Также хорошо известна возможность предоставления вычисления маршрута с заданными пользователем критериями, например пользователь может предпочесть обзорный маршрут, который должен быть вычислен устройством. Программное обеспечение устройства затем вычисляет различные маршруты и оценивает наиболее предпочтительные из них, которые содержат вдоль маршрута наибольшее число точек интереса (известные как POI), которые отмечены, например, как являющиеся живописной архитектурой.
Согласно предшествующему уровню техники навигационные устройства выполнены с возможностью отображать карту на дисплее, например, чтобы показать запланированный маршрут пользователю. Это помогает ему ориентироваться. Навигационное устройство может также использоваться только в качестве устройства отображения карты без возможности планирования маршрута или отображения текущей позиции. Однако обычно отображается только часть карты. Если пользователь хочет видеть часть карты, которая находится за пределами области дисплея, например слева (или к западу) от дисплея, ему/ей необходимо прокручивать карту вправо. Это может быть сделано посредством использования (виртуальных) кнопок, предусмотренных в навигационном устройстве, или посредством использования манипулятора типа мышь. Прокрутка может также быть сделана посредством перемещения пишущего элемента (пера или указателя) или пальца по сенсорному экрану.
Краткое описание изобретения
Целью изобретения является предоставить альтернативный способ прокрутки карты, отображенной навигационным устройством. Чтобы достигнуть этой цели, изобретение предоставляет навигационное устройство, как определено во вступлении, отличающееся тем, что навигационное устройство дополнительно содержит камеру, выполненную с возможностью предоставлять видеопоток от камеры процессору, процессор дополнительно выполнен с возможностью:
- принимать видеопоток от камеры,
- обнаруживать перемещение навигационного устройства на основе принятого видеопотока от камеры,
- прокручивать отображаемые картографические данные в ответ на обнаруженное перемещение.
Это предоставляет альтернативный способ прокрутки отображенной карты в желательном направлении без необходимости использования (виртуальных) кнопок или мышки. Также способ прокрутки соответствует интуиции пользователя так, как если он/она смотрит карту, используя увеличительное стекло, где дисплей действует как увеличительное стекло, а карта простирается по области, большей, чем дисплей навигационного устройства.
Согласно варианту осуществления изобретения процессор выполнен с возможностью обнаруживать перемещение навигационного устройства из видеопотока от камеры, используя технологии распознавания образов. Использование технологии распознавания образов является легким и надежным способом для того, чтобы измерить перемещение камеры. Эти технологии распознавания образов известны специалистам.
Согласно варианту осуществления изобретения процессор выполнен с возможностью обнаруживать направление из обнаруженного перемещения и прокручивать отображаемые картографические данные в направлении, противоположном обнаруженному направлению. Обнаружение перемещения навигационного устройства может быть использовано, чтобы определить направление прокрутки, предоставляя легкий и интуитивный способ прокрутки в желаемом направлении.
Согласно варианту осуществления изобретения процессор выполнен с возможностью определять расстояние из обнаруженного перемещения и прокручивать отображаемые картографические данные на расстояние прокрутки, соответствующее определенному расстоянию. Расстояние прокрутки карты может легко управляться пользователем посредством привязки расстояния прокрутки карты к расстоянию, на которое переместилось навигационное устройство.
Согласно варианту осуществления изобретения расстояние прокрутки регулируется на основе коэффициента чувствительности. Расстояние прокрутки, кроме того, может зависеть от коэффициента чувствительности, определяющего величину прокрутки на основе обнаруженного перемещения навигационного устройства.
Согласно варианту осуществления изобретения коэффициент чувствительности является регулируемым. Это обеспечивает пользователя возможностью изменения чувствительности системы в соответствии с его/ее желаниями.
Согласно варианту осуществления изобретения коэффициент чувствительности дополнительно зависит от фокусного расстояния камеры. Камеры могут быть предоставлены с функцией автофокусировки. Информация об измененном фокусном расстоянии может быть предоставлена камерой процессору. Расстояние до объектов в видеопотоке от камеры влияет на величину обнаруженного перемещения. Когда камера сфокусирована на близком объекте, величина обнаруженного перемещения будет выше, чем когда камера сфокусирована на удаленном объекте. Чтобы компенсировать этот эффект, фокусное расстояние камеры может использоваться для того, чтобы регулировать коэффициент чувствительности.
Согласно варианту осуществления изобретения процессор выполнен с возможностью обнаруживать вращение из обнаруженного перемещения и прокручивать отображаемые картографические данные, вращая отображаемые картографические данные в направлении, противоположном направлению обнаруженного перемещения. Это предоставляет легкий и интуитивный способ для поворота представления карты.
Согласно варианту осуществления изобретения процессор выполнен с возможностью обнаруживать перемещение в направлении оптической оси камеры и прокручивать отображаемые картографические данные, выполняя операцию масштабирования, соответствующую обнаруженному перемещению. Это предоставляет легкий способ укрупнения или уменьшения масштаба.
Согласно варианту осуществления изобретения навигационное устройство дополнительно содержит устройства памяти, чтобы хранить картографические данные.
Согласно варианту осуществления изобретения навигационное устройство дополнительно содержит устройство позиционирования, выполненное с возможностью обеспечивать процессор информацией, чтобы определить текущую позицию навигационного устройства, и навигационное устройство выполнено с возможностью находиться в первом режиме, в котором навигационное устройство выполнено с возможностью отображать картографические данные, или во втором режиме, в котором навигационное устройство выполнено с возможностью определять текущую позицию с помощью устройства позиционирования, планировать маршрут и вести пользователя по запланированному маршруту. Это объединяет устройство отображения карты с навигационным устройством, снабженным возможностью планирования маршрута и проведения пользователя по запланированному маршруту.
Согласно варианту осуществления изобретения навигационное устройство выполнено с возможностью переключаться из первого режима во второй режим, или наоборот, на основе информации от устройства позиционирования.
Согласно варианту осуществления изобретения информация от устройства позиционирования является одной из: конечного адреса, скорости, ускорения. Они являются показаниями того, предпочтет ли или нет пользователь использовать устройство в первом или втором режиме. Например, когда обнаружены высокие скорости и/или высокие ускорения, пользователь, вероятно, хочет использовать навигационное устройство во втором режиме. Когда обнаружено, что пункт назначения был достигнут, пользователь, вероятно, больше не хочет использовать навигационное устройство во втором режиме, таким образом, навигационное устройство может переключиться в первый режим автоматически.
Согласно варианту осуществления изобретения навигационное устройство выполнено с возможностью переключаться во второй режим в случае, когда информация не предоставляется устройством позиционирования. В этом случае навигационное устройство, весьма вероятно, находится в помещении, таким образом, пользователю нет необходимости использовать навигационное устройство во втором режиме.
Согласно варианту осуществления изобретения навигационное устройство выполнено с возможностью переключаться из первого режима во второй режим, или наоборот, на основе пользовательского ввода, к примеру посредством нажатия соответствующей кнопки, соединенной с процессором.
Согласно варианту осуществления изобретения навигационное устройство дополнительно снабжено внутренними датчиками, такими как акселерометр и/или гироскоп, чтобы дополнительно увеличить точность обнаруженного перемещения навигационного устройства на основе принятого видеопотока от камеры. Эти внутренние датчики могут использоваться, чтобы снабжать навигационное устройство дополнительной информацией, чтобы дополнительно увеличить точность обнаруженного перемещения.
Согласно дополнительному аспекту изобретение относится к способу прокрутки картографических данных, отображаемых в навигационном устройстве, навигационное устройство содержит дисплей, способ содержит:
- отображение картографических данных на дисплее,
отличающемуся тем, что навигационное устройство также содержит камеру, способ дополнительно содержит:
- прием видеопотока от камеры,
- обнаружение перемещения навигационного устройства на основе принятого видеопотока от камеры,
- прокрутку отображаемых картографических данных в ответ на обнаруженное перемещение.
Согласно дополнительному аспекту изобретение относится к вычислительной программе, которая, когда загружена в вычислительно устройство, дает возможность выполнять вышеописанный способ.
Согласно дополнительному аспекту изобретение относится к носителю данных, содержащему вычислительную программу, описанную выше.
Краткое описание чертежей
Варианты осуществления настоящего изобретения будут описаны, только в качестве примера, со ссылкой на сопроводительные схематические чертежи, в которых соответствующие ссылочные символы указывают соответствующие части и на которых:
фиг.1 схематически представляет схематическую блок-схему навигационного устройства;
фиг.2 схематически представляет схематический вид навигационного устройства;
фиг.3 схематически представляет вид сбоку навигационного устройства согласно варианту осуществления изобретения;
фиг.4a, 4b и 4c схематически изображают вид спереди, вид сзади и вид сбоку соответственно навигационного устройства согласно варианту осуществления изобретения,
фиг.5а, 5b и 5с схематически представляют навигационное устройство согласно варианту осуществления изобретения; и
фиг.6 показывает схему последовательности операций согласно варианту осуществления изобретения.
Подробное описание изобретения
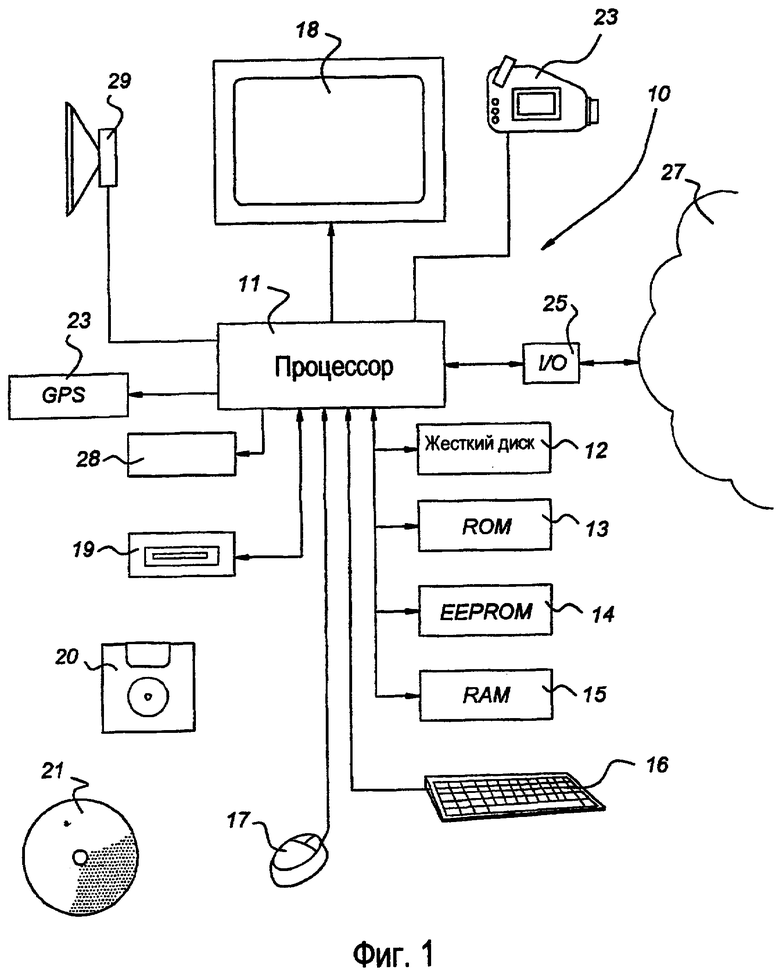
Фиг.1 показывает схематическую блок-схему варианта осуществления навигационного устройства 10, содержащего процессор 11 для выполнения арифметических операций. Процессор 11 выполнен с возможностью соединяться с блоками памяти, которые хранят инструкции и данные, такими как жесткий диск 12, постоянное запоминающее устройство (ROM) 13, электрически стираемое программируемое постоянное запоминающее устройство (EEPROM) 14 и оперативное запоминающее устройство (RAM) 15. Блоки памяти могут содержать картографические данные. Эти картографические данные могут быть двумерными картографическими данными (широта и долгота), но также могут содержать третье измерение (высоту). Картографические данные могут дополнительно содержать дополнительную информацию, например информацию о бензиновых/газовых заправочных станциях, точках интереса. Картографические данные могут также содержать информацию о форме зданий и объектов вдоль дороги.
Процессор 11 также может быть выполнен с возможностью соединяться с одним или более устройств ввода, такими как клавиатура 16 или мышь 17. Клавиатура 16 может, например, быть виртуальной клавиатурой, представленной на дисплее 18, который является экраном чувствительным к прикосновению. Процессор 11 может дополнительно быть выполнен с возможностью связываться с одним или более устройств вывода, таким как дисплей 18, динамик 29, и одним или более блоков 19 считывания для того, чтобы считывать, например, флоппи-диски 20 или CD-ROM 21. Дисплей 18 может быть традиционным компьютерным дисплеем (например, ЖК) или может быть дисплеем проекционного типа, таким как расположенный на уровне лобового стекла дисплей, используемый для проецирования инструментальных данных на лобовое стекло или ветровой щиток автомобиля.
Дисплей 18 может также быть дисплеем, выполненным с возможностью функционировать как чувствительный к прикосновению экран, что позволяет пользователю вводить инструкции и/или информацию посредством прикосновения к дисплею 18 своим пальцем.
Динамик 29 может быть реализован как часть навигационного устройства 10. В случае когда навигационное устройство 10 используется как автомобильное навигационное устройство, навигационное устройство 10 может использовать динамики автомобильной аудиосистемы, бортового компьютера или подобное.
Процессор 11 дополнительно может быть выполнен с возможностью связываться с устройством 23 позиционирования, таким как GPS-приемник, который предоставляет информацию о позиции навигационного устройства 10. Согласно этому варианту осуществления устройство 23 позиционирования - это устройство 23 позиционирования, построенное на базе GPS. Тем не менее, следует понимать, что навигационное устройство 10 может быть реализовано любым типом технологии определения местоположения и не ограничено GPS. Оно может быть реализовано с помощью других видов GNSS (спутниковая система глобальной навигации), такой как Европейская система Галилео. Также оно не ограничено системами определения положения/скорости на спутниковой основе и также может быть развернуто с помощью наземных маяковых сигналов или любых других видов систем, которые позволяют устройству определять свое географическое положение.
Тем не менее, следует понимать, что они могут быть представлены с другими или отличными по количеству блоками памяти, устройствами ввода и устройствами считывания, хорошо известными специалистам в данной области техники. Кроме того, одно или несколько этих устройств могут быть физически расположены удаленно от процессора 11, если потребуется. Процессор 11 показан как один блок, однако он может содержать несколько процессоров, функционирующих параллельно и управляемых одним главным процессором, который может быть расположен удаленно от других, как хорошо известно специалистам в данной области техники.
Навигационное устройство 10 показано как вычислительная система, но может быть любой системой обработки сигналов с аналоговой и/или цифровой и/или программной технологией, выполненной с возможностью выполнять функции, описываемые в данном документе. Следует понимать, что несмотря на то, что навигационное устройство 10 показано на фиг.1 как множество компонентов, навигационное устройство 10 может быть реализовано как единое устройство.
Навигационное устройство 10 может использовать навигационное программное обеспечение, например навигационное программное обеспечение Navigator от компании TomTom B.V. Программное обеспечение Navigator может запускаться на PDA-устройстве Pocket PC с чувствительным к прикосновению экраном (например, для управления стилусом), таком как, Compaq iPaq, или на любом другом устройстве, которое имеет встроенный GPS-приемник 23. Объединенная система PDA и GPS-приемника сконструирована для того, чтобы использоваться в качестве автомобильной навигационной системы. Изобретение также может быть осуществлено в любой другой форме навигационного устройства 10, например в виде GPS-приемника/компьютера/дисплея, или устройства, сконструированного для использования вне транспортного средства (например, для пешеходов) или в транспортных средствах, отличных от автомобиля (например, в самолетах).
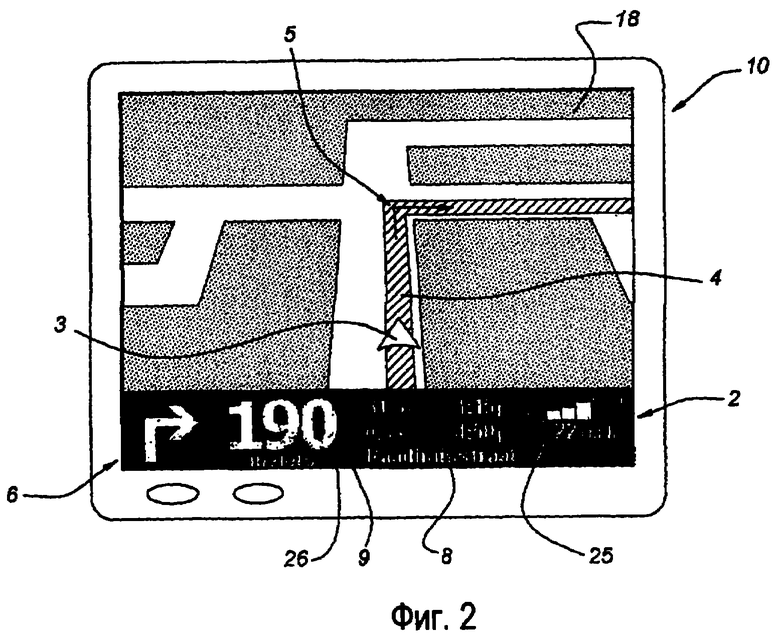
Фиг.2 показывает навигационное устройство 10, описанное выше.
Навигационное программное обеспечение, когда запущено в навигационном устройстве 10, отображает экран нормального навигационного режима на дисплее 18, как показано на фиг.2. Этот вид может предоставлять инструкции для управления транспортным средством с помощью комбинации текста, символов, голосовых подсказок и перемещаемой карты. Ключевые элементы пользовательского интерфейса следующие: 3D карта, занимающая большую часть экрана. Отметим, что карта также может быть показана как 2D карта.
Карта показывает позицию навигационного устройства 10 и его непосредственное окружение, вращаемое таким образом, что направление, в котором навигационное устройство 10 перемещается, всегда направлено "вверх". Строка 2 состояния может проходить через экран в нижней четверти экрана. Текущее положение навигационного устройства 10 (которое навигационное устройство определило самостоятельно с помощью традиционного GPS-определения положения) и его ориентация (которое выводится из направления движения) показаны позиционной стрелкой 3. Маршрут 4, вычисленный устройством (с помощью алгоритмов вычисления маршрута, сохраненных в устройствах 11, 12, 13, 14, 15 памяти в качестве применяемых к картографическим данным, сохраненным в картографической базе данных в устройствах 11, 12, 13, 14, 15 памяти), показан как затемненный (или подсвеченный) путь. На маршруте 4 все основные действия (например, закругления поворотов, пересечения дорог, круговые развязки и т.п.) схематически изображены стрелкой 5, наложенной поверх маршрута 4. Строка 2 состояния также включает в себя с левой стороны схематическую иконку, изображающую следующее действие 6 (в данном случае поворот направо). Строка 2 состояния также показывает расстояние до следующего действия 6 (например, поворот направо - здесь расстояние составляет 50 м), как извлеченное из базы данных всего маршрута, вычисленного устройством (т.е. из списка всех дорог и связанных предпринимаемых действий, задаваемых маршрутом). Строка 2 состояния также показывает название текущей дороги 8, оставшееся до конца поездки время 9 (в данном случае 35 минут), актуальное оценочное время 25 прибытия (16:50) и расстояние до места назначения 26 (31,6 км). Строка 2 состояния может дополнительно показывать дополнительную информацию, например мощность GPS-сигнала в виде индикатора мощности видеопотока стилем, подобно используемому в мобильных телефонах.
Как уже упомянуто выше, навигационное устройство может содержать устройство ввода, такое как чувствительный к прикосновению экран, который позволяет пользователю вызывать навигационное меню (не показано). Из этого меню могут быть инициированы и управляться другие навигационные функции. Разрешение выбора навигационных функций из экрана меню, которые сами по себе очень легко вызываются (например, одним действием от отображения карты до экрана меню), значительно упрощает взаимодействие пользователя и делает его более быстрым и простым. Навигационное меню включает в себя варианты для ввода пользователем места назначения.
Фактическая физическая структура навигационного устройства 10 сама по себе фундаментально может не отличаться от любого традиционного карманного компьютера, за исключением встроенного GPS-приемника 23 или GPS-данных, получаемых от внешнего GPS-приемника. Следовательно, устройства 12, 13, 14, 15 памяти хранят алгоритмы вычисления маршрута, картографическую базу данных и программное обеспечение пользовательского интерфейса; процессор 12 интерпретирует и обрабатывает пользовательский ввод (например, с помощью чувствительного к прикосновению экрана) для того, чтобы ввести начальный и конечный адреса и все другие входные команды управления и применяет алгоритмы вычисления маршрута для того, чтобы вычислить оптимальный маршрут. "Оптимальность" может ссылаться на критерий, например наименьшее время или наикратчайшее расстояние или некоторые другие связанные с пользователем факторы.
Более конкретно, пользователь вводит свою начальную позицию и требуемое место назначения в навигационное программное обеспечение, запущенное на навигационном устройстве 10, с помощью предоставленных устройств ввода, таких как чувствительный к прикосновению экран 18, клавиатура 16 и т.п. Пользователь затем выбирает способ, которым будет вычислен маршрут: предлагаются различные режимы, например "быстрый" режим, который вычисляет маршрут очень быстро, но маршрут может не быть кратчайшим; "полный" режим, который просматривает все возможные маршруты и выделяет кратчайший, но дольше по времени вычисления, и т.п. Возможны другие варианты с заданным пользователем маршрутом, который является живописным, например проходит через множество POI (точек интереса), которые помечены как виды с живописной архитектурой, или проходит через множество POI возможного интереса для детей, или использует наименьшее число пересечений дорог и т.д.
Сами дороги описываются в картографической базе данных, которая является частью навигационного программного обеспечения (или иным образом доступна для него), запущенным на навигационном устройстве 10, как линии, т.е. векторы (например, начальная точка, конечная точка, направление для дороги, полностью дорога составлена из многих сотен таких секций, каждая уникально задана параметрами начальной точки/конечной точки, направления). Карта затем составляется из таких векторов дорог, плюс точки интереса (POI), плюс названия дорог, плюс другие географические элементы, такие как границы парков, границы рек и т.п., все они задаются в терминах векторов. Все картографические элементы (например, векторы дорог, POI и т.п.) задаются в координатной системе, которая соответствует или относится к координатной системе GPS, давая возможность поместить позицию устройства, как определенную через GPS-систему, на соответствующую дорогу, показанную на карте.
Вычисление маршрута использует сложные алгоритмы, которые являются частью навигационного программного обеспечения. Алгоритмы применяются для того, чтобы подсчитать большое количество потенциальных разных маршрутов. Навигационное программное обеспечение затем оценивает их по заданному пользователем критерию (или по настройкам по умолчанию устройства), такому как сканирование в полном режиме, с маршрутом по живописным местам, старинные музеи и без камер измерения скорости. Маршрут, который наилучшим образом соответствует заданным критериям, затем вычисляется процессором 11 и затем сохраняется в базе данных в устройствах 12, 13, 14, 15 памяти как последовательность векторов, названий дорог и действий, которые необходимо выполнить на конечной точке вектора (например, соответствующих предварительно заданным расстояниям вдоль каждой дороги на маршруте, например, через 100 метров поворот налево, на улицу х).
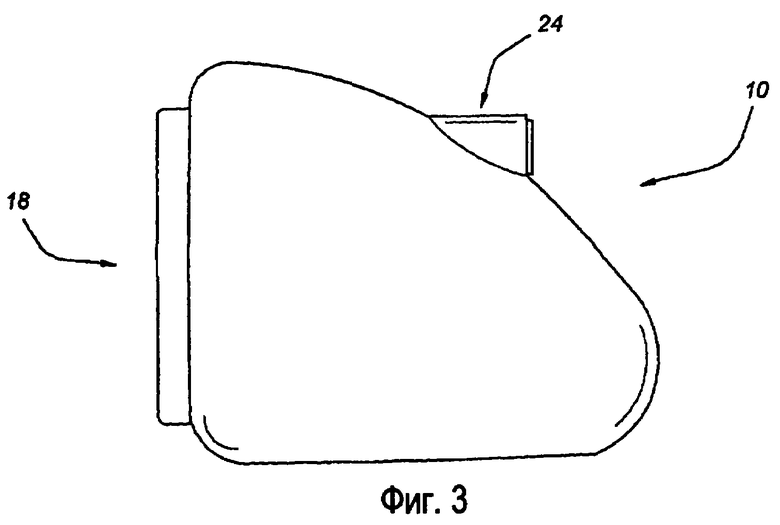
Навигационное устройство 10 снабжено камерой 24, как показано на фиг.1. Фиг.3 схематически изображает вид сбоку навигационного устройства 10, показывающий камеру 24, сформированную как неотъемлемая часть навигационного устройства 10. Фиг.3 также схематически показывает дисплей 18. Камера 24 выполнена с возможностью создавать видеопоток от камеры и передавать этот видеопоток от камеры, процессору 11, показанному на фиг. 1. Процессор 11 выполнен с возможностью анализировать принятый видеопоток от камеры, как будет описано ниже.
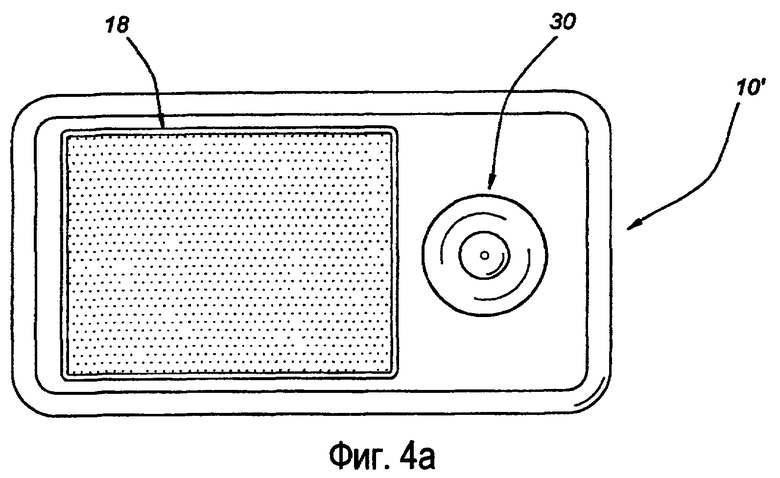
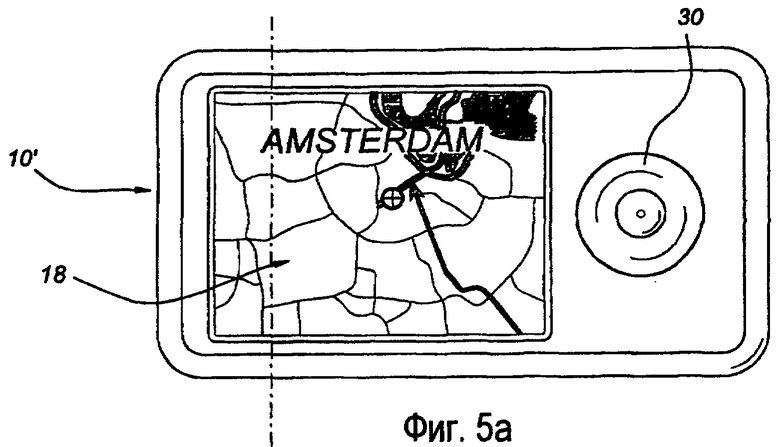
Фиг.4a и 4b показывают вид спереди и сзади соответственно альтернативного навигационного устройства 10'. Фиг.4a показывает дисплей 18, отображающий часть картографических данных, и кнопочное устройство 30, содержащее одну или более сформированных как неотъемлемая часть кнопок. Фиг.4b показывает камеру 24, предусмотренную на задней стороне навигационного устройства 10'. В заключение, фиг.4c схематически показывает вид сбоку навигационного устройства 10'.
Альтернативное навигационное устройство 10', описанное со ссылкой на фиг.4a, 4b и 4c, главным образом является устройством отображения карты, без возможности определения текущей позиции навигационного устройства 10', планирования маршрута и направления пользователя по конечному адресу. Таким образом, навигационное устройство 10' выполнено с возможностью работать только в первом режиме, в котором навигационное устройство 10' используется только в качестве устройства отображения карты, в то время как навигационное устройство 10 выполнено с возможностью работать в первом и втором режимах, причем второй режим предназначен для того, чтобы определять текущую позицию, планировать маршрут и направлять пользователя по запланированному маршруту.
Будет понятно, что и навигационное устройство 10, описанное со ссылкой на фиг.1, 2 и 3, так же, как и навигационное устройство 10', описанное со ссылкой на фиг.4a, 4b и 4c, может использоваться в соединении с изобретением.
Согласно изобретению навигационное устройство 10, 10' выполнено с возможностью обнаруживать перемещение навигационного устройства 10, 10', анализируя изображения, зарегистрированные камерой 24. Это может быть сделано посредством использования простых технологий распознавания образов, известных из предшествующего уровня техники.
Например, известны технологии распознавания образов, которые подходят, чтобы распознавать определенные характеризующие элементы (края, углы) в видеопотоке от камеры, и следить за этими элементами, когда камера 24 (или снимаемый элемент) перемещается. За счет этого может быть обнаружено перемещение камеры 24. Чтобы реализовать это, устройства 12, 13, 14, 15 памяти могут хранить программные инструкции, инструктирующие процессор 11 так, чтобы выполнять технологии распознавания образов, чтобы обнаруживать перемещение камеры 24 и, следовательно, навигационного устройства 10, 10'.
Технологии распознавания образов в предпочтительном варианте следят за множеством элементов в видеопотоке от камеры. Чем больше элементов отслеживается, тем более надежно может быть обнаружено перемещение навигационного устройства 10, 10'. В случае, когда отслеживается множество элементов, процессор 11 может определить перемещение камеры 24 только в случае, когда в подобном перемещении участвует большинство элементов (например, более чем 75%). Это предотвращает ошибочное обнаружение перемещения, вызванное перемещением снимаемого объекта. Перемещение снимаемого объекта обычно приводит в результате только к перемещению сравнительно небольшого числа элементов.
Камера 24 в предпочтительном варианте способна фокусироваться на объекте, находящемся относительно близко к навигационному устройству 10, 10', чтобы позволить использование возможности прокрутки согласно изобретению, когда навигационное устройство 10, 10' лежит на столе или т.п.
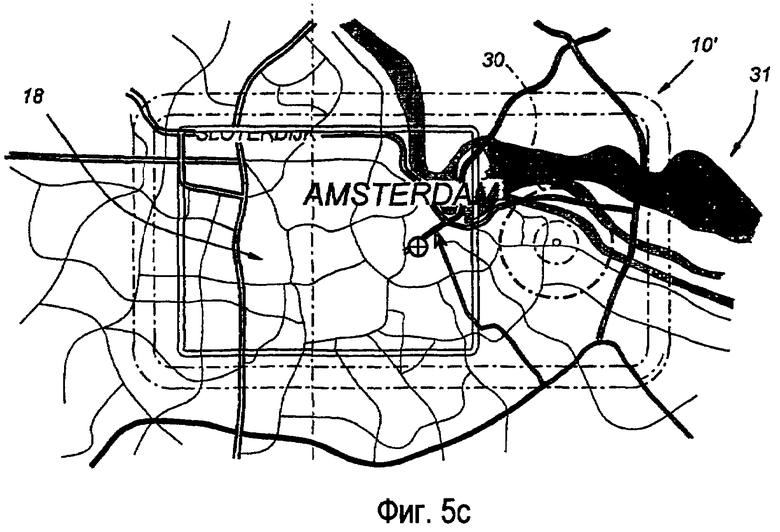
На основе обнаруженного перемещения камеры прокручивается отображаемая карта. Например, когда обнаружено перемещение камеры 24 влево, карта может быть прокручена вправо. Конечно, картографические данные могут также прокручиваться влево на основе обнаруженного перемещения навигационного устройства 10 влево, но прокрутка в противоположном направлении обнаруженного перемещения лучше соответствует интуиции пользователя, как будет дополнительно объяснено в ссылке к фиг.5c.
Это дополнительно показано на фиг.5a и 5b. Фиг.5a изображает навигационное устройство 10', подобное фиг.4a. Фиг.5b изображает навигационное устройство 10', аналогичное показанному на фиг.5a, которое перемещается вверх влево вдоль стрелки A в сравнении со своей позицией в реальном мире на фиг.5a. Это перемещение обнаруживается навигационным устройством 10' посредством анализа видеопотока от камеры 24, с помощью технологий распознавания образов, как описано выше. Это также применяется к навигационному устройству 10, изображенному на фиг.1, 2 и 3.
Конечно, может быть применен коэффициент чувствительности, чтобы определить расстояние прокрутки на основе обнаруженного перемещения навигационного устройства 10, 10'. Этот коэффициент чувствительности может быть регулируемым пользователем, например через меню, доступное в навигационном устройстве 10, 10'.
Когда обнаружено перемещение навигационного устройства 10, 10', процессор 11 выполнен с возможностью прокручивать отображаемые картографические данные в соответствующем направлении, в этом случае в противоположном направлении, вниз вправо. Расстояние, на которое прокручивается карта (расстояние прокрутки), зависит от расстояния обнаруженного перемещения навигационного устройства 10, 10'. Будет понятно, что расстояние перемещения элементов в видеопотоке от камеры, отслеживается не только в зависимости от расстояния, на которое переместилось навигационное устройство 10, 10', но также от расстояния между навигационным устройством 10, 10' и снимаемыми элементами. Следовательно, коэффициент чувствительности может также зависеть от расстояния между камерой 24 и снимаемыми элементами. Это расстояние может быть определено процессором 11 или камерой 24 посредством определения соответствующего фокусного расстояния.
Вышеуказанное заканчивается в навигационном устройстве 10, 10', которое, когда двигается, создает иллюзию того, что навигационное устройство 10, 10' похоже на увеличительное стекло, используемое, чтобы смотреть на карту, которая простирается за границы дисплея 18. Когда навигационное устройство 10 перемещается, показываются различные части карты. Это схематически показано на фиг.5c. Фиг.5c показывает навигационное устройство 10, 10', окруженное виртуальными картографическими данными 31. Когда навигационное устройство 10, 10' перемещается вправо, отображаются виртуальные картографические данные 31, находящиеся справа от навигационного устройства 10, 10'. Другими словами: это, как если навигационное устройство 10, 10' перемещается по бесконечной карте.
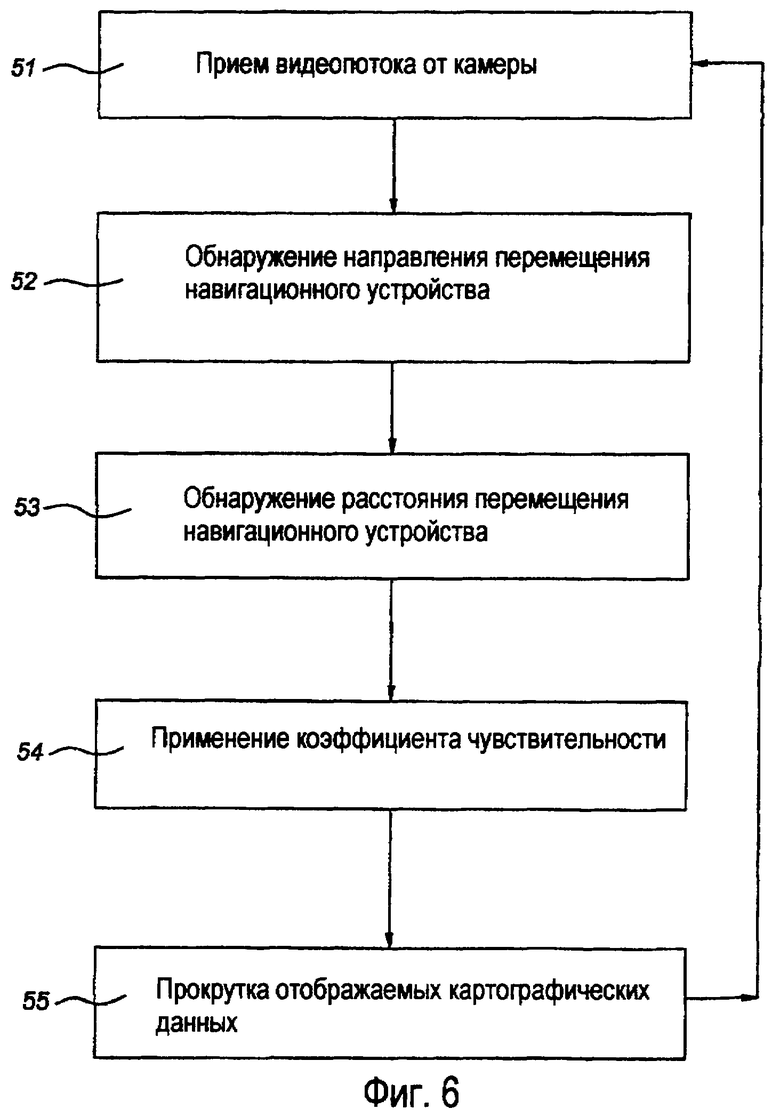
Фиг.6 схематически изображает схему последовательности этапов, выполняемых процессором 11 при выполнении вышеописанного способа прокрутки.
На первом этапе 51 процессор 11 принимает видеопоток от камеры 24. В действительности, видеопоток от камеры, может быть непрерывным сигналом, постоянно принимаемым процессором 11.
На втором этапе 52 процессор 11 обнаруживает направление перемещения навигационного устройства 10, 10' на основе принятого видеопотока от камеры. Это может быть сделано посредством использования всех видов технологий анализа, например технологий распознавания образов, как описано выше.
На третьем этапе 53 процессор 11 обнаруживает расстояние перемещения навигационного устройства 10, 10' на основе обнаруженного перемещения из принятого видеопотока от камеры.
Опять же, это может быть сделано посредством использования всех видов технологий анализа, например, как описано выше.
На четвертом этапе 54 обнаруженное расстояние может быть умножено на коэффициент чувствительности. Этот коэффициент может быть регулируемым пользователем или может зависеть от расстояния между камерой 24 и снимаемыми элементами или от масштаба карты.
В заключение, на пятом этапе 55, отображаемые картографические данные прокручиваются в направлении, соответствующем обнаруженному направлению (к примеру, в противоположном направлении). Расстояние прокрутки может зависеть от обнаруженного расстояния перемещения навигационного устройства и коэффициента чувствительности.
Будет понятно, что процессор 11 фактически функционирует в цикле и постоянно принимает и анализирует видеопоток от камеры и постоянно, соответственно, прокручивает отображаемые картографические данные.
Вышесказанное является сказанным только о горизонтальном перемещении навигационного устройства 10, 10' и картографических данных. Однако будет понятно, что вышесказанное может также использоваться для других типов перемещений, таких как выполнение вращательного движения и выполнение операций масштабирования.
Используя вышеупомянутые технологии распознавания образов, может быть обнаружено вращательное перемещение навигационного устройства 10, 10'. Это может быть реализовано путем слежения за характеризующими элементами (краями, углами) в видеопотоке от камеры и отслеживания этих элементов, как описано выше. Направление вращения и угол вращения обнаруживаются процессором 11 на основе видеопотока от камеры. Далее, отображаемые картографические данные прокручиваются (вращаются) в противоположном направлении на подобный угол.
С помощью вышеупомянутых технологий распознавания образов может быть обнаружено перемещение навигационного устройства 10, 10' в направлении оптической оси камеры 24. Это может быть реализовано следующими характеризующими элементами (краями, углами) в видеопотоке от камеры, и отслеживая эти элементы. Направление перемещения и величина перемещения могут быть обнаружены процессором 11 на основе видеопотока от камеры. Когда обнаружено перемещение вдоль оптической оси камеры 24 в направлении, вдоль которого смотрит камера 24, процессор 11 может увеличить отображаемые картографические данные, т.е. приблизить. Когда обнаружено противоположное перемещение (например, вдоль оптической оси камеры 24 в направлении, противоположном направлению, вдоль которого смотрит камера), процессор 11 может уменьшить масштаб отображаемых картографических данных, т.е. отдалить.
Степень приближения или уменьшения масштаба зависит от величины перемещения навигационного устройства 10, 10' вдоль оптической оси. Опять же, может быть применен коэффициент чувствительности, чтобы регулировать скорость масштабирования до желаемой пользователем. Конечно, масштабирование может быть выполнено наоборот, т.е. когда обнаружено перемещение вдоль оптической оси камеры 24 в направлении, в котором камера 24 смотрит, процессор 11 может уменьшить масштаб отображаемых картографических данных, т.е. отдалить.
Будет понятно, что изобретение, как описано выше, может применяться в навигационном устройстве 10, 10', выполненном с возможностью отображать картографические данные двумерным способом (2D), а также к навигационному устройству, выполненному с возможностью отображать картографические данные (псевдо)перспективным или трехмерным способом (3D). Когда используется (псевдо)перспективный или трехмерный режим, карта представляется так, как будто она будет видна с точки наблюдения над поверхностью земли, смотря вниз на землю под определенным углом зрения, как представлено картографическими данными.
В случае, когда навигационное устройство отображает картографические данные перспективным или трехмерным способом (3D), на основе обнаруженного перемещения могут выполняться другие операции прокрутки, в отличие от двухмерного случая. Например, перемещение навигационного устройства 10, 10' в направлении оптической оси может привести в результате не к операции масштабирования, а может привести в результате к прокрутке картографических данных в таком направлении, что пользователь получает впечатление того, что он/она 'летит' над поверхностью земли, как представлено картографическими данными. Также вращательное движение может привести в результате к изменению направления, в котором картографические данные просматриваются с точки наблюдения. Таким образом, в случае, когда обнаружено вращательное движение навигационного устройства 10, 10' против часовой стрелки, направление наблюдения может быть изменено с севера на запад (таким образом, картографические данные прокручиваются в направлении по часовой стрелке).
Технологии распознавания образов могут обнаруживать все виды перемещений посредством отслеживания элементов и анализа перемещения этих элементов. Если, например, большинство всех элементов перемещаются в одинаковом направлении, может быть обнаружено горизонтальное перемещение (влево-вправо-вверх-вниз или их комбинация). Если, например, большинство элементов в верхней части видеопотока от камеры, перемещаются влево, в нижней части видеопотока от камеры, перемещаются вправо, в левой части видеопотока от камеры, перемещаются вниз, а в правой части видеопотока от камеры, перемещаются вверх (может быть обнаружено вращательное движение направление против часовой стрелки). Также если большинство элементов кажутся движущимися в направлении от центральной точки, может быть обнаружено перемещение вдоль оптической оси камеры 24, в направлении, в котором камера 24 смотрит.
Точность обнаруженного перемещения на основе видеопотока от камеры может быть дополнительно увеличена посредством использования внутренних датчиков 28 (см. фиг.1), таких как акселерометр, гироскоп и т. д. Внутренние датчики 28 выполнены с возможностью обнаруживать перемещение, ускорения и вращения навигационного устройства 10, 10'. Внутренние датчики 28 могут быть соединены с процессором 11, чтобы передавать свои показания процессору 11.
Показания внутренних датчиков могут использоваться для того, чтобы увеличить точность обнаруженного перемещения навигационного устройства 10 на основе видеопотока от камеры. Это может увеличить качество обнаружения движения/угла зрения на основе видеопотока от камеры или регулировать скорость и/или направление, в котором карта прокручивается (передвигается/вращается/масштабируется).
Вышеописанный способ прокрутки карты на основе обнаруженного перемещения навигационного устройства 10, 10' посредством анализа видеопотока от камеры может использоваться в комбинации с вариантами прокрутки графических материалов текущего уровня техники, например использование (виртуальных) кнопок или мыши. При использовании в комбинации пользователь может отвергать, завершать или корректировать перемещения прокрутки, выполненные на основе видеопотока от камеры.
Термин "навигационное устройство 10, 10', в качестве используемого в данном тексте, не только ссылается на навигационное устройство, выполненное с возможностью определять текущую позицию или определять оптимальный маршрут до определенного пункта назначения, но заключает в себе все устройства, которые помогают осуществлять навигацию или ориентироваться, отображая (часть) карту, такое как навигационное устройство, изображенное на фиг.4a, 4b и 4c.
В случае, когда изобретение используется в комбинации с навигационным устройством 10, которое снабжено функциональностью определения текущей позиции, планирования маршрута и/или навигации по такому запланированному маршруту, навигационное устройство 10 должно быть снабжено возможностью переключения с первого режима, в котором навигационное устройство 10 используется только как устройство отображения карты, во второй режим, в котором навигационное устройство 10 используется, чтобы направлять пользователя по запланированному маршруту.
Переключение из первого режима во второй режим и наоборот может быть сделано вручную пользователем, к примеру с помощью соответствующих кнопок, но может также быть сделано автоматически навигационным устройством 10. Такие кнопки могут также быть виртуальной кнопкой.
Кнопка выполнена с возможностью предоставлять сигнал процессору 11, указывающий переключение режима, или, более конкретно, переключиться в первый или второй режим.
Например, когда навигационное устройство 10 выполнено с возможностью принимать GPS-сигнал с помощью устройства 23 позиционирования, оно может обнаруживать перемещение и скорость перемещения навигационного устройства 10. В случае, когда обнаруженная скорость (скорость перемещения) и/или ускорение относительно высокие, например относительно предварительно определенных пороговых значений, навигационное устройство 10 может автоматически переключиться (из второго режима) в первый режим. В этом случае пользователь наиболее вероятно перемещается и сконцентрирован на виде карты на основе текущего местоположения навигационного устройства 10, и пользователю не нужно прокручивать карту, кроме прокрутки вследствие перемещения навигационного устройства 10.
В случае, когда GPS-сигнал не принимается устройством 23 позиционирования навигационного устройства 10, система может переключиться во второй режим. В этом случае навигационное устройство 10, наиболее вероятно, находится в помещении, и пользователь, вероятно, не перемещается. Навигационное устройство может использовать последнюю правильную принятую GPS-позицию, принятую устройством 23 позиционирования, чтобы определить, какую часть карты отображать на дисплее 18. Навигационное устройство 10 может также использовать внутренние датчики 28, такие как акселерометр, гироскоп и т.д., чтобы дополнительно более точно определить местоположение.
Навигационное устройство 10 может также переключиться во второй режим в случае, когда согласно устройству 23 позиционирования был достигнут желаемый пункт назначения (адрес).
Также если устройством 23 позиционирования навигационного устройства 10 не принимается правильный GPS-сигнал, но внутренними датчиками 28, например акселерометром, гироскопом и т.д., и/или камерой 24 обнаружено относительно большое перемещение, навигационное устройство 10 может переключиться (из первого) во второй режим.
Поскольку конкретные варианты осуществления изобретения были описаны выше, следует признать, что изобретение может быть осуществлено на практике и иными способами, чем были описаны. Например, изобретение может принимать форму вычислительной программы, содержащей одну или множество последовательностей машиночитаемых инструкций, описывающих способ, раскрытый выше, или носителя хранения данных (например, полупроводниковая память, магнитный или оптический диск), имеющего подобную вычислительную программу, сохраненную на нем. Как будет понятно специалистам в данной области техники, все программные компоненты также могут быть реализованы в виде аппаратных компонентов.
Вышеприведенные описания рассматриваются в качестве иллюстративных, а не ограничивающих. Таким образом, для специалистов в данной области техники очевидно, что могут быть реализованы модификации описанного изобретения без отступления от объема формулы изобретения, приведенной ниже.
Настоящее изобретение относится к навигационному устройству. Технический результат заключается в предоставлении возможности прокрутки карты, отображенной навигационным устройством. Такой результат достигается благодаря тому, что навигационное устройство (10, 10') содержит камеру (24), выполненную с возможностью предоставлять видеопоток от камеры процессору (11), процессор (11) выполнен с возможностью принимать видеопоток от камеры (24), обнаруживать перемещение навигационного устройства (10, 10') на основе принятого видеопотока от камеры путем распознавания определенных характеризующих элементов в одном изображении и отслеживания тех элементов в последующем изображении упомянутого видеопотока от камеры с помощью технологий распознавания образов и прокручивать отображаемые картографические данные в ответ на обнаруженное перемещение. 3 н. и 14 з.п. ф-лы, 10 ил.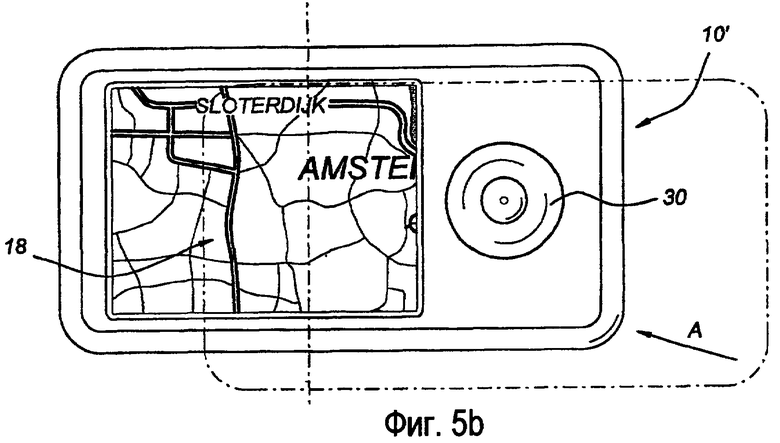
1. Навигационное устройство (10, 10'), содержащее процессор (11) и дисплей (18), при этом процессор (11) выполнен с возможностью отображать картографические данные на дисплее (18), причем упомянутый дисплей обеспечивается на передней стороне упомянутого устройства, отличающееся тем, что навигационное устройство (10, 10') дополнительно содержит камеру (24) на задней стороне упомянутого устройства, выполненную с возможностью предоставлять видеопоток от камеры процессору (11), причем процессор (11) также выполнен с возможностью:
принимать видеопоток от камеры (24),
обнаруживать перемещение навигационного устройства (10, 10') на основе принятого видеопотока от камеры, путем распознавания определенных характеризующих элементов в одном изображении и отслеживания тех элементов в последующем изображении упомянутого видеопотока от камеры с помощью технологий распознавания образов,
прокручивать отображаемые картографические данные в ответ на обнаруженное перемещение.
2. Навигационное устройство (10, 10') по п.1, в котором процессор (11) выполнен с возможностью обнаруживать направление из обнаруженного перемещения и прокручивать отображаемые картографические данные в направлении, противоположном обнаруженному направлению.
3. Навигационное устройство (10, 10') по любому из пп.1 и 2, в котором процессор (11) выполнен с возможностью определять расстояние от обнаруженного перемещения и прокручивать отображаемые картографические данные на расстояние прокрутки, соответствующее определенному расстоянию.
4. Навигационное устройство (10, 10') по п.3, в котором расстояние прокрутки регулируется на основе коэффициента чувствительности.
5. Навигационное устройство (10, 10') по п.4, в котором коэффициент чувствительности является регулируемым.
6. Навигационное устройство (10, 10') по любому из пп.4 и 5, в котором коэффициент чувствительности также зависит от фокусного расстояния камеры (24).
7. Навигационное устройство (10, 10') по п.1, в котором процессор (11) выполнен с возможностью обнаруживать вращение из обнаруженного перемещения и прокручивать отображаемые картографические данные, вращая отображаемые картографические данные в направлении, противоположном направлению обнаруженного движения.
8. Навигационное устройство (10, 10') по п.1, в котором процессор (11) выполнен с возможностью обнаруживать перемещение в направлении оптической оси камеры (24) и прокручивать отображаемые картографические данные, выполняя операцию масштабирования, соответствующую обнаруженному перемещению.
9. Навигационное устройство (10, 10') по п.1, которое также содержит устройства (12, 13, 14, 15) памяти, чтобы хранить картографические данные.
10. Навигационное устройство (10) по п.1, которое также содержит устройство (23) позиционирования, выполненное с возможностью обеспечивать процессор (11) информацией, чтобы определить текущую позицию навигационного устройства (10), и навигационное устройство (10) выполнено с возможностью находиться в первом режиме, в котором навигационное устройство (10) выполнено с возможностью отображать картографические данные, или во втором режиме, в котором навигационное устройство (10) выполнено с возможностью определять текущую позицию с помощью устройства (23) позиционирования, планировать маршрут и проводить пользователя по запланированному маршруту.
11. Навигационное устройство (10) по п.10, которое выполнено с возможностью переключаться из первого режима во второй режим или наоборот, на основе информации от устройства (23) позиционирования.
12. Навигационное устройство (10) по п.11, в котором информация от устройства (23) позиционирования является одним из: конечного адреса, скорости, ускорения.
13. Навигационное устройство (10) по любому из пп.10-12, которое выполнено с возможностью переключаться во второй режим в случае, когда информация не предоставляется устройством (23) позиционирования.
14. Навигационное устройство (10) по п.10, которое выполнено с возможностью переключаться из первого режима во второй режим или наоборот, на основе пользовательского ввода, к примеру посредством нажатия соответствующей кнопки, соединенной с процессором (11).
15. Навигационное устройство (10, 10') по п.1, которое также содержит внутренние датчики (28), такие как акселерометр и/или гироскоп, чтобы дополнительно увеличить точность обнаруженного перемещения навигационного устройства (10, 10') на основе принятого видеопотока от камеры.
16. Способ прокрутки картографических данных, отображаемых на навигационном устройстве (10, 10'), содержащем дисплей (18), причем упомянутый дисплей обеспечивается на передней стороне упомянутого устройства, способ содержащий этап, на котором отображают картографические данные на дисплее (18), и
отличающийся тем, что навигационное устройство (10, 10') дополнительно содержит камеру (24) на задней стороне упомянутого устройства, при этом способ дополнительно содержит этапы, на которых
принимают видеопоток от камеры (24),
обнаруживают перемещение навигационного устройства (10, 10') на основе принятого видеопотока от камеры, путем распознавания определенных характеризующих элементов в одном изображении и отслеживания тех элементов в последующем изображении упомянутого видеопотока от камеры с помощью технологий распознавания образов, и
прокручивают отображаемые картографические данные в ответ на обнаруженное перемещение.
17. Носитель данных, содержащий компьютерную программу, которая, когда загружена в компьютерное устройство, выполнена с возможностью осуществлять способ по п.16.
| US 6288704 В1, 11.09.2001 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 6741928 B2, 25.05.2004 | |||
| ТОНКОПЛЕНОЧНАЯ МНОГОЯЧЕИСТАЯ СТРУКТУРА, ИЗГОТОВЛЕННАЯ ИЗ КОЛЛАГЕНА, ЭЛЕМЕНТ ДЛЯ РЕГЕНЕРАЦИИ ТКАНИ, СОДЕРЖАЩИЙ ЕЕ, И СПОСОБ ЕЕ ПОЛУЧЕНИЯ | 2007 |
|
RU2404819C2 |
| RU 2004103827 A, 20.07.2005. | |||

